陆空两栖机场道面及公路路面勘测平台
1.本实用新型属于机场巡查设备技术领域,具体涉及一种陆空两栖机场道面及公路路面勘测平台。
背景技术:
2.根据现有规定,在飞机起降前后均需对机场道面情况进行巡查,并对异常情况进行排查清理,保障飞机的起降安全。在场地巡查过程中,需要依照民用机场飞行区场地日常巡视检查记录表中的要求进行检查,例如对道面是否有外来物、是否损坏、是否被污染,土面区高差是否出现异常、是否平整等要求进行检查与记录,如发生异常,则在表中对其进行详细记录并拍照示意。目前的机场道面均由人工进行监测,在巡查时可根据需要采用乘坐巡查车辆、骑自行车或徒步等方式进行。监测次数则根据日到达架次的不同而变化。该方法具有如下缺陷:
3.1、人工道面监测工作成本高、时间长且效率低。
4.2、人工道面监测无法及时有效的处理刚出现或已存在的问题,信息传输较慢。
5.3、机场道面工作环境艰苦,地勤工作者工作压力重。
6.在高速公路运行时,需进行乘车巡查,部份区域通过监控器监管,以对路面状况日常巡查,处理道面突发状况,保证车辆正常通行;在道面质量评估时,采用抽样调查,随机抽取路段,检测路段道面质量,从而评估整体道面质量状况。该方法具有如下缺陷:
7.1、日常巡查周期长,突发状况不能及时发现处理;
8.2、高速路封闭式管理,交通堵塞时,内部画面及状况无法及时发现并得到有效解决;
9.3、日常监管巡查费高。
10.因此,目前亟需一种智能高效快速的、能够对机场和公路路面进行智能巡检的勘测工具。
技术实现要素:
11.本实用新型为解决现有技术中存在的技术问题而提供了一种效率高、自动化程度高、信息传输及时、可有效减轻人工作业强度的陆空两栖机场道面及公路路面勘测平台。
12.为了达到上述目的,本实用新型采用如下技术方案:
13.一种陆空两栖机场道面及公路路面勘测平台,包括地面传动结构、摄录平台以及飞行控制结构;
14.所述地面传动结构包括两对车轮,其中一对为支撑轮,另一对为由动力马达提供动力的动力齿轮;同一侧车轮之间覆盖有履带;在两个支撑轮内侧设有竖直的支撑轮安装板,两个动力齿轮内侧设有竖直的动力齿轮安装板;
15.所述摄录平台包括水平的支撑板,所述支撑板固定于支撑轮安装板及动力齿轮安装板顶部;支撑台上设有搭载了运动相机的三轴云台、为整个平台供电的锂铁电池安放台
以及控制平台运行模式的电子主板;
16.所述飞行控制结构包括3个机臂,所述机臂分别安装在支撑板左右两端以及后端;所述机臂上设有由电子主板控制的倾转舵机;所述机臂分为固定段和转动段,与支撑板连接的固定段位置固定不可转动,固定段的末端与倾转舵机连接;倾转舵机同时与转动段的一侧连接从而使转动段能够按照要求进行90
°
内的角度变换。所述转动段的末端上方均设有由电子主板控制的航模无刷马达,航模无刷马达与设在一侧的螺旋桨同轴连接以便带动螺旋桨转动。
17.进一步,所述支撑板上设有若干用于连接拍摄用的三轴云台的安装孔。
18.进一步,所述支撑板的一端设有锂铁电池安放台;所述锂铁电池安放台通过若干支柱悬空于支撑板上方,各支柱之间为电子主板放置处。
19.进一步,当平台处于飞行模式,倾转舵机在所述电子主板的控制下将机臂完全伸展,所有螺旋桨水平设置;当平台处于陆地模式,所述转动段与固定端互相垂直。
20.更进一步,当平台处于陆地模式,设在支撑板左右两侧的机臂向平台后侧旋转;设在支撑板后侧的机臂竖直向上旋转。
21.本实用新型具有的优点和积极效果是:
22.本实用新型的勘测平台可对高速公路进行日常巡查监管,可利用飞行模式全方位探测道面状况,在低空飞行时快速近距离勘察道面目标,快速评估道面状况,在不利于无人机飞行时,可启动陆地模式抵近目标物体进行更细致更全面的勘测侦察,并对其进行快速定位。与传统人工排查相比,在其高效的“两模式三快速”共同作用下及图像识别功能对道面状况实时监测,及时发现处理道面突发状况,保证车辆正常通行。
附图说明:
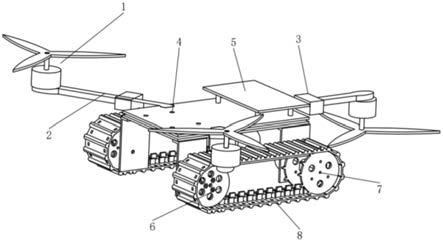
23.图1是本实用新型的勘测平台在飞行模式的三维图;
24.图2是本实用新型的勘测平台在飞行模式的又一三维图;
25.图3是本实用新型的勘测平台在陆地模式的三维图。
26.其中:1、航模无刷马达;2、机臂;21、转动段;22、固定段;3、倾转舵机;4、三轴云台安置孔;5、锂铁电池安放台;6、支撑轮;7、动力齿轮;8、履带;9、动力马达;10、电子主板放置处;11、支撑轮安置板;12、动力齿轮安置板;13、支撑板。
具体实施方式
27.下面将结合本实用新型实施例中的附图;对本实用新型实施例中的技术方案进行清楚、完整地描述;显然;所描述的实施例仅仅是本实用新型一部分实施例;而不是全部的实施例。基于本实用新型中的实施例;本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例;都属于本实用新型保护的范围。
28.如图1
‑
3所示,本实施例提供了一种陆空两栖机场道面及公路路面勘测平台,包括地面传动结构、摄录平台以及飞行控制结构;所述地面传动结构包括以一定间距设置的两对车轮,其中一对为支撑轮6,另一对为由动力马达9提供动力的动力齿轮7;同一侧车轮之间覆盖有履带8;在两个支撑轮6内侧设有竖直的支撑轮6安装板,两个动力齿轮7内侧设有竖直的动力齿轮7安装板;
29.所述摄录平台包括水平的支撑板13,所述支撑板13固定于支撑轮6安装板及动力齿轮7 安装板顶部;支撑板13上设有若干用于连接拍摄用的三轴云台的安装孔,三轴云台上搭载运动相机;所述支撑板13的一端设有锂铁电池安放台5以便为整个平台供电;所述锂铁电池安放台5通过若干支柱悬空于支撑板13上方,各支柱之间为电子主板放置处10,电子主板内存储有适用于平台飞行模式和陆地模式的各种运行参数。
30.所述飞行控制结构包括3个机臂2,所述机臂2分别安装在支撑板13左右两端以及后端;所述机臂2上设有由电子主板控制的倾转舵机3;倾转舵机3是一种角度伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统;所述机臂2分为转动段21和固定段22,与支撑板13连接的固定段位置固定不可转动,固定段的末端与倾转舵机3连接;倾转舵机3同时与转动段的一侧连接从而使转动段能够按照要求进行90
°
内的角度变换。具体的,当平台处于飞行模式,倾转舵机3在所述电子主板的控制下将机臂2完全伸展;当平台处于陆地模式,所述转动段与固定端互相垂直。所述转动段的末端上方均设有由电子主板控制的航模无刷马达1,航模无刷马达1与设在一侧的螺旋桨同轴连接以便带动螺旋桨转动。
31.工作原理:
32.飞行模式:图1、2所示,电子主板控制倾转舵机3将机臂2完全伸展,所有螺旋桨转动至水平,同时电子主板通过调节三个航模无刷马达1的转速,使整个勘测平台完成起飞、降落以及巡航等任务,巡航时飞行器可沿着规划航线完成自主飞行;三轴云台上搭载的运动相机拍摄回传道况画面,完成勘测任务。
33.陆地模式:图3所示,当飞行器着陆后,电子主板控制倾转舵机3将对应机臂2的转动段旋转90
°
从而收缩减小整体宽度,避免因车身太宽而行动受阻碍;同时电子主板通过控制动力马达9使地面传动结构完成前进倒退以及转弯等任务。具体的,设在支撑板13左右两侧的机臂2向平台后侧旋转,这样不会遮挡运动相机的视线;设在支撑板13后侧的机臂2竖直向上旋转,对应的螺旋桨在平台后侧竖起,一旦因地形或其他原因导致动力马达9动力不足时,电子主板控制航模无刷马达1启动,后侧的螺旋桨旋转并提供向前的推力,来保证勘测任务的顺利完成。
34.以上对本实用新型的实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1