基于车联网电动汽车智能精确控制行驶过程的辅助装置的制作方法
1.本实用新型涉及纯电动汽车的控制装置,具体地说,涉及一种基于车联网电动汽车智能精确控制行驶过程的辅助装置。
背景技术:
2.纯电动汽车以其零排放、不依赖石油资源的优点,属于一种环保的交通工具,并且随着行驶时里程和充电问题的解决,已成为未来汽车工业发展的主要方向。现有纯电动汽车均由整车控制装置进行集中控制,由控制器局域网络(can,controller area network)进行信号传输,即由整车控制装置接受驾驶员的操作实现启动、停车、制动、自动驾驶等,在行驶过程中对车速的控制也是由驾驶员的操作来实现,即通过电子油门的控制,从而控制整车控制装置实现加速、减速比例的调整,以及各个控制模块的调用。并且随着互联网技术的发展,车联网(internet of vehicles)技术也快速发展,例如,由车辆位置、速度和路线等信息构成的巨大交互网络,通过gps、rfid、传感器、摄像头图像处理等装置,与整车控制装置信号连接,使得车辆可以完成自身环境和状态信息的采集,即通过车载设备(obu,on board unit)与路侧设备(rsu,road side unit)进行通讯,实现车辆身份识别,提供最佳路线、及时汇报路况等等。
3.但是,上述各种技术的发展,在电动汽车启动、停车、制动、自动驾驶以及加速、减速比例的调整时,仍只能根据驶员的操作进行调整与控制,甚至可以实现车辆身份识别、根据路况获取最佳路线等等,但并不能实现精确控制,对于出现的车辆急停、急行等情况不能缓解,导致车内乘客的舒适度不够,对于车辆的行驶操作并没有改进。
技术实现要素:
4.本实用新型中的目的在于提供一种基于车联网电动汽车智能精确控制行驶过程的辅助装置,不仅可以增加电动汽车的安全性,而后可以节能及增加乘客的舒适性。
5.本实用新型中基于车联网电动汽车智能精确控制行驶过程的辅助装置,与整车控制装置信号连接,所述辅助装置包括有与整车控制装置信号连接的车载设备(obu),与所述车载设备通讯连接的路侧设备(rsu),所述辅助装置进一步包括有:
6.数据采集装置,用于实时采集汽车行驶过程中的车辆数据;
7.坡度采集装置,用于实时采集汽车行驶过程所处位置的坡度;
8.车速采集装置,用于实时采集汽车行驶过程的车速;
9.轮速采集装置,用于实时采集汽车行驶过程的轮速;
10.重量采集装置,用于采集汽车行驶过程每次停止、启动后的重量;
11.能量回收装置,用于汽车行驶过程中回收电压和电流信息;
12.所述数据采集装置、坡度采集装置、车速采集装置、轮速采集装置,重量采集装置、能量回收装置分别独立地与整车控制装置内部对应的信号接收器信号连接,由信号接收器将接收到的信号同时传送给整车控制装置内的pid控制模块和判断逻辑模块。
13.优选地,所述数据采集装置为车道偏移采集装置。
14.优选地,所述坡度采集装置为安装在车身内底部前后两端的两个倾角传感器。
15.优选地,轮速采集装置为安装在轮轴上的四个轮速传感器。
16.优选地,重量采集装置为车辆高度传感器或直接安装在车身内底部的重量传感器。
17.使用本实用新型中的辅助装置后可以输出驾驶员意图预判,可以增加行驶的安全性及乘座的舒适性。另,通过整车的全要素分析,形成整车控制逻辑方案,可以对行驶车辆作进行更精确的智能控制,可以有效节能10%。
附图说明
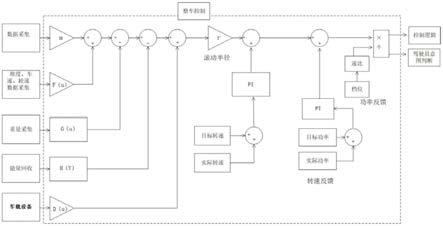
18.图1是本实用新型中辅助装置与整车控制装置连接的结构示意图。
具体实施方式
19.本实用新型中基于车联网电动汽车智能精确控制行驶过程的辅助装置专用于纯电动汽车,优其是用于大型公共运输客车,大型公共运输客车在运输过程中会有乘客的上、下车,重量变化差异大,容易导致驾驶员的判断有误差,容易操控不当。并且运输的是众多乘客,需要特殊的安全考虑。
20.如图1所示,本实用新型中基于车联网电动汽车智能精确控制行驶过程的辅助装置包括有数据采集装置,坡度采集装置、车速采集装置、轮速采集装置、重量采集装置、能量回收装置及车载设备。其中数据采集装置,坡度采集装置、车速采集装置、轮速采集装置、重量采集装置、能量回收装置及车载设备均通过信号连接的方式分别独立地与整车控制装置内对应的接收器联接,并将采集到的数据信号分别传送到整车控制装置内,由整车控制装置内的pid(比例
‑
积分
‑
微分控制器)控制模块和判断逻辑模块通过所需车速和实际车速对比、档位的判断,输出整车控制逻辑方案和驾驶员意图预判。具体地:
21.数据采集装置,用于汽车行驶过程时实时采集汽车的具体数据,本实用新型中的数据采集装置是车道偏移采集装置,通过整车控制装置内的控制器局域网络(can,controller area network)来获取行驶中的车道偏移数据。
22.坡度采集装置,用于汽车行驶过程时实时采集汽车所处位置的坡度,本实用新型中的坡度采集装置为倾角传感器,包括有安装在车身内底部前后两端的两个倾角传感器,通过计算前后两个倾角传感器的高度差来获得汽车所处位置的坡度。
23.车速采集装置,用于汽车行驶过程时实时采集汽车行驶的车速,本实用新型采用的是车速传感器,通过整车控制装置内的can(controller area network)控制系统来获取行驶中的车速数据。
24.轮速采集装置,用于汽车行驶过程时实时采集汽车每个车轮的轮速,本实用新型采用的安装在轮轴上的四个轮速传感器。
25.重量采集装置,用于采集汽车行驶过程每次停止、启动后的重量,本实用新型采用车辆高度传感器,再依can(controller area network)控制系统提供的车速、扭矩、加速度、坡度等信息计算出整车重量。当然也可以是安装在车身内底部的重量传感器。
26.能量回收装置,用于汽车行驶过程回收电压和电流信息,本实用型采用的是制动
能量回收装置。
27.车载设备(obu,on board unit),通过通讯方式连接的路侧设备(rsu,road side unit)获取车辆的实时数据,包括车和车之间的数据,车和路之间的数据。
28.车道偏移采集装置,坡度采集装置、车速采集装置、轮速采集装置、重量采集装置、能量回收装置、车载设备分别将采集到的数据信号传送给整车控制装置,通过整车控制装置内的pid控制模块和判断逻辑模块与所需车速和实际车速对比、档位的判断,输出整车控制逻辑方案和驾驶员意图预判。其中,驾驶员意图预判包括有加速、加速比例,减速、加减比例以及启动、停车等信息。整车控制逻辑方案包括启动、停车、加速需求及扭矩、减速需求及扭矩、制动等信息。输出的整车控制逻辑方案和驾驶员意图预判同时输送给制动控制装置及踏板控制装置,在驾驶员给出操作的同时,对驾驶员的操作进行缓冲和辅助,缓解驾驶员操作不当或用力过大导致的过激行驶,从而可以缓解乘客由于驾驶员操作导致的不适感。
29.综上所述,使用本实用新型中的辅助装置后可以更精确地控制汽车的行驶过程,因为有驾驶员意图预判的输出,可以增加行驶的安全性及乘座的舒适性。另,通过整车控制逻辑方案的输出,即基于整车的全要素(车道偏移、坡度、车速、轮速、重量、能量以及路况)分析,逻辑判断来精确控制车辆,可以对行驶车辆作进行更精确的智能控制,可以有效节能10%。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1