一种自动刹车系统的制作方法
[0001]
本申请涉及汽车安全技术领域。尤其涉及一种自动刹车系统。
背景技术:
[0002]
随着社会经济的快速发展以及人们生活水平的提高,汽车已经普及到大多数的家庭,随着车辆的增多,当前路上驾驶情况复杂,驾驶员的反应能力也有差异,路上行车交通事故在所难免,而大多数的交通事故中,大多是由于车速太快、车距过短或刹车不及时造成的。
[0003]
因此,亟需提供一种自动刹车系统,在检测到车辆运行方向上出现障碍物时,辅助司机进行制动或者自动对车辆进行制动,避免或减少交通事故的发生。
技术实现要素:
[0004]
本说明书实施例提供了一种自动刹车系统,用于提供一种自动检测车辆行车方向上的障碍物,实现辅助制动或自动制动的方案。
[0005]
基于此,本说明书实施例提供一种自动刹车系统,包括:
[0006]
红外测距传感器组件,所述红外测距传感器组件固定在车体的挡风玻璃顶部的中央位置,所述红外测距传感器组件包括多个红外测距传感器;
[0007]
双目摄像头,所述双目摄像头固定在所述车体的挡风玻璃上且位于所述红外测距传感器组件的两侧;
[0008]
中央处理器,所述中央处理器的第一信号输入端与所述红外测距传感器组件的信号输出端连接,所述中央处理器的第二信号输入端与所述双目摄像头的信号输出端连接;
[0009]
刹车装置,所述刹车装置的信号输入端与所述中央处理器的第一信号输出端连接,并且所述刹车装置通过接收所述中央处理器所传输的信号,对所述车体进行制动。
[0010]
可选的,所述红外测距传感器组件与所述双目摄像头位于同一高度。
[0011]
可选的,所述车体的前挡风玻璃以及所述车体的后挡风玻璃上都安装有所述红外测距传感器组件以及所述双目摄像头。
[0012]
可选的,在所述红外测距传感器以及所述双目摄像头的上方安装有补光灯。
[0013]
可选的,还包括显示屏,所述显示屏设置在所述车体内;所述显示屏的信号输入端与所述中央处理器的第二信号输出端连接;所述中央处理器将处理后的距离信息显示在所述显示屏上。
[0014]
可选的,所述中央处理器的第三信号输出端与报警装置连接;所述报警装置用于发出语音提醒、灯光闪烁、蜂鸣、显示报警信息中的一种或多种信号。
[0015]
可选的,所述红外测距传感器组件实时检测所述车体行车方向上的障碍物与所述车体之间的距离;所述双目摄像头用于采集所述车体行车方向上的图像信息。
[0016]
可选的,所述双目摄像头在所述红外测距传感器组件检测到的所述车体行车方向上的障碍物与所述车体之间的距离小于预设距离时,启动拍摄功能,对所述车体行车方向
上的障碍物进行拍摄,并保存图像信息。
[0017]
可选的,所述双目摄像头将所述图像信息发送给所述中央处理器;所述中央处理器对所述图像信息进行转换计算,确定所述障碍物在所述车体前后的三维位置。
[0018]
可选的,所述红外测距传感器组件固定在车体的挡风玻璃顶部的正中央位置。
[0019]
本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
[0020]
本实用新型提供一种自动刹车系统,通过在车体的挡风玻璃的顶部安装红外测距传感器组件以及双目摄像头,且双目摄像头位于红外测距传感器组件的两侧;中央处理器的第一信号输入端与所述红外测距传感器组件的信号输出端连接,中央处理器的第二信号输入端与所述双目摄像头的信号输出端连接;刹车装置的信号输入端与中央处理器的第一信号输出端连接,并且刹车装置通过接收所述中央处理器所传输的信号,对所述车体进行制动。可以探测在行车过程中,车体在行车方向上与障碍物之间的三维位置关系,从而确定出车体与障碍物之间的距离。在车体与障碍物之间的距离达到预设刹车距离时,中央处理器向刹车装置发送刹车信号,刹车装置对车体进行制动,实现自动刹车,提高行车安全性。
附图说明
[0021]
为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图:
[0022]
图1为本说明书实施例提供的一种自动刹车系统中红外测距传感器组件以及双目摄像头安装示意图;
[0023]
图2为本说明书实施例提供的一种自动刹车系统的测距示意图;
[0024]
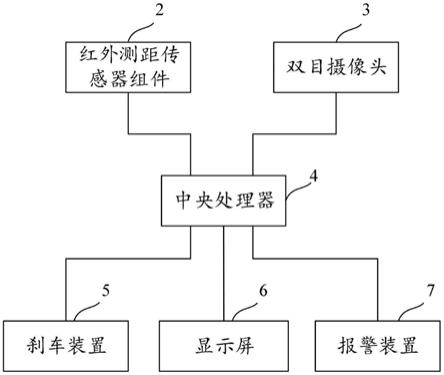
图3为本说明书实施例提供的一种自动刹车系统的各部件连接关系示意图。
[0025]
附图标记:
[0026]
1-车体,2-红外测距传感器组件,3-双目摄像头,4-中央处理器,5-刹车装置,6-显示屏,7-报警装置,8-补光灯。
具体实施方式
[0027]
为了使本技术领域的人员更好地理解本说明书中的技术方案,下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本说明书实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
[0028]
随着社会经济的迅猛发展,一种新型的城市交通方式可以是在城市中铺设单轨轨道,通过单轨轨道上的输送带将车辆进行传送,解决道路拥堵的问题。由此,需要提供一种适用于单轨轨道交通领域的行车安全方案。本说明书实施例中的方案就可以应用到单轨道交通领域中。
[0029]
刹车系统可以在实际应用中,辅助驾驶员及时进行刹车,也可以自动对车辆实现制动,能够即使避免车辆因为车速过快或者刹车不及时导致的碰撞。
[0030]
在实际应用中,很多刹车装置只能探测距离车辆较近的障碍物,等到检测到障碍物时,车辆距离障碍物已经很近,车辆刹车时由于惯性,并不能立马停下,存在一定的刹车距离,因此,需要一定的时间使车辆停止,现有的刹车装置中没有充足的时间对车辆进行制动,起不到及时对车辆进行制动的作用。
[0031]
图1为本说明书实施例提供的一种自动刹车系统中红外测距传感器组件以及双目摄像头安装示意图。如图1所示,车体1上安装有红外测距传感器组件2以及双目摄像头3,所述红外测距传感器组件2固定在车体1的挡风玻璃顶部。其中,所述红外测距传感器组件2可以包括多个红外测距传感器。
[0032]
可选的,红外测距传感器组件2可以安装在车体1的挡风玻璃的顶部中央位置,以便于更好地检测车体1与障碍物之间的距离。当然,在实际应用中,红外测距传感器组件2也可以安装在车体1的挡风玻璃的任意位置,理论上只要不遮挡驾驶员视线,满足相应法规即可。红外测距传感器组件2除了可以安装在车体1的挡风玻璃上之外,还可以安装在车体1的其他任意位置。
[0033]
双目摄像头3可以固定在车体1的挡风玻璃上,并且双目摄像头3可以位于红外测距传感器组件2的两侧。双目摄像头3的数量可以根据实际应用场景进行设定,本说明书实施例对此不作限定。
[0034]
另外,需要说明的是,车辆在行驶过程中,有前进过程,也有倒车过程或者左右转弯,因此,可以在车辆的前挡风玻璃和后挡风玻璃上都安装红外测距传感器组件2以及双目摄像头3。由于红外测距传感器组件2可以实时检测所述车体行车方向上的障碍物与所述车体1之间的距离;因此,红外测距传感器组件2可以在车辆启动时开启,双目摄像头3可以用于采集车体1行车方向上的图像信息,双目摄像头3可以具有拍摄功能,拍摄功能可以包括拍照功能以及录像功能。双目摄像头3可以在车辆启动时开启拍摄功能。
[0035]
可选的,所述双目摄像头3还可以在所述红外测距传感器组件2检测到的所述车体1行车方向上的障碍物与所述车体1之间的距离小于预设距离时,再启动拍摄功能,对所述车体1行车方向上的障碍物进行拍摄,并保存图像信息。
[0036]
图2为本说明书实施例提供的一种自动刹车系统的测距示意图,如图2所示,红外距离传感器组件2安装在汽车前挡风玻璃上。红外测距传感器组件2中可以包括多个红外测距传感器,红外测距传感器具有一对红外信号发射与接收二极管,利用的红外测距传感器发射出一束红外光,在照射到物体后形成一个反射的过程,反射到传感器后接收信号,然后利用ccd图像处理接收发射与接收的时间差的数据。经信号处理器处理后计算出与物体之间的距离。
[0037]
特别是在雨雪天气或者其他环境较为复杂的应用场景中,结合红外测距传感器以及双目摄像头,能够在实时监测车体与障碍物之间的距离的同时,计算得到高准确率的距离,以实现更为有效的辅助刹车或自动刹车。
[0038]
双目摄像头3是利用双目测距原理进行成像,通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。所以对于任何类型的障碍物,都能根据距离信息的变化,进行必要的预警或制动。双目摄像头3的原理与人眼相似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体呈现的图像存在差异,也称“视差”。
[0039]
上述系统中,设置红外测距传感器组件2以及双目摄像头3,两者相互作用,可以较为准确地确定出行车过程中,车体1与障碍物之间的距离,距离测算准确率高。
[0040]
图3为本说明书实施例提供的一种自动刹车系统的各部件连接关系示意图。如图3所示,自动刹车系统中还可以包括以下结构:
[0041]
中央处理器4,所述中央处理器4的第一信号输入端与所述红外测距传感器组件2的信号输出端连接,所述中央处理器4的第二信号输入端与所述双目摄像头3的信号输出端连接;
[0042]
刹车装置5,所述刹车装置5的信号输入端与所述中央处理器4的第一信号输出端连接,并且所述刹车装置5可以通过接收所述中央处理器4所传输的信号,对所述车体1进行制动。
[0043]
其中,中央处理器4(central processing unit/processor,简称cpu),其功能主要是解释计算机指令以及处理计算机软件中的数据。电脑中所有操作都由cpu负责读取指令,对指令译码并执行指令的核心部件。在本申请中,中央处理器4可以用于接收红外测距传感器组件2采集的距离信息,以及双目摄像头3采集的图像信息,并可以基于距离信息和图像信息发出指令,例如:发出刹车指令、报警指令,或者显示指令等。
[0044]
可选的,所述红外测距传感器组件2与所述双目摄像头3可以位于同一高度。不需要执行因为位置关系而涉及的距离转换,能够更为便捷地测算车体1与障碍物之间的距离。例如:假设将红外测距传感器组件2安装在车体1的前挡风玻璃上,双目摄像头3安装在车体1的前车灯旁边,此时,在测算距离时还需要算上前挡风玻璃到前车灯之间的距离,不利于提高测算效率。
[0045]
可选的,在所述双目摄像头3的上方可以安装有补光灯8,能够在双目摄像头3进行3d摄像时,为双目摄像头3进行光线辅助,保证摄像环境光线充足,使采集到的图像信息更加清晰准确。
[0046]
可选的,自动刹车系统还可以包括显示屏6,所述显示屏6可以设置在所述车体1内;所述显示屏6的信号输入端与所述中央处理器4的第二信号输出端连接;所述中央处理器4可以将处理后的距离信息显示在所述显示屏6上。便于驾驶员及时获取车体1与障碍物之间的距离信息,从而辅助驾驶员进行安全驾驶。
[0047]
可选的,所述中央处理器4的第三信号输出端与报警装置7连接;所述报警装置7可以用于发出语音提醒、灯光闪烁、蜂鸣、显示报警信息中的一种或多种信号,从而及时告知驾驶员进行刹车。
[0048]
可选的,所述中央处理器4对所述图像信息进行转换计算,确定所述障碍物在所述车体1前后的三维位置。
[0049]
本申请中的设置,可以在需要刹车时,辅助驾驶员进行车辆制动,当驾驶员接管制动时,制动权由驾驶员获得,当驾驶员没有制动时,该方案的自动刹车系统可以自动控制制动。
[0050]
上述实施例中的自动刹车系统,在具体实现过程中,可以采用以下方法步骤完成车辆制动:
[0051]
安装在车体挡风玻璃上的红外测距传感器组件采集得到距离信息;安装在车体挡风玻璃上的双目摄像头采集得到图像信息。红外测距传感器组件将采集得到距离信息发送
给中央处理器;双目摄像头也将采集得到图像信息发送给中央处理器。中央处理器根据接收到的距离信息以及图像信息,基于双目测距原理计算车体与障碍物之间在行车方向上的距离。并判断所述距离是否达到预设刹车距离;若所述距离达到预设刹车距离,中央处理器发出制动指令,驱动刹车装置对车体进行制动。
[0052]
可选的,中央处理器还可以判断所述距离是否达到预设报警距离;若所述距离达到预设报警距离,发出报警指令;所述报警指令可以用于触发报警模块进行报警。所述行车过程可以包括前进过程和倒车过程。
[0053]
需要说明的是,为了论述方便,上述方法步骤中的结构省略了序号标注。
[0054]
上述对本说明书特定实施例进行了描述,其它实施例在所附权利要求书的范围内。
[0055]
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
[0056]
以上所述仅为本说明书实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1