一种无人驾驶汽车安全员手持装置的制作方法
1.本实用新型涉及一种无人驾驶汽车安全员手持装置,属于无人驾驶技术领域。
背景技术:
2.无人驾驶车辆在实际运营和开发调试时,由于车上没有安装传统的车辆仪表盘,车上安全员无法获知无人驾驶车辆和无人驾驶控制系统的实时运行状态,也无法与无人驾驶车辆和无人驾驶控制系统进行有效的交互;并且,由于车上没有安装传统的转向、制动和油门等车辆控制装置,当无人驾驶控制系统出现问题不能继续控制车辆时,车上安全员无法及时接管车辆对车辆进行人工控制,虽然有些车辆上安装了急停按钮能够实现紧急停车,但由于急停按钮是开关量形式,只能提供比较大的固定减速度,在紧急制动时对车上人员的保护不足,乘客体验很差,并且由于急停按钮安装位置一般偏高,安全员必须站立才能进行操作,安全员的安全性也存在风险。
3.综上所述,由于目前的无人驾驶车辆上没有安装传统的车辆仪表盘和传统的转向、制动和油门等车辆控制装置,导致车上安全员无法及时了解无人驾驶车辆的行驶状态,缺少对车辆进行安全控制的能力,车辆行驶的安全性较差。
技术实现要素:
4.本实用新型的目的在于提供一种无人驾驶汽车安全员手持装置,用以解决目前车上安全员缺少对无人驾驶车辆进行安全控制的能力,无人驾驶车辆行驶安全性较差的问题。
5.为实现上述目的,本实用新型提供了一种无人驾驶汽车安全员手持装置,该手持装置包括:制动模拟量输入模块、转向模拟量输入模块、驱动模拟量输入模块、通信接口、电源输入接口和处理器;
6.所述处理器分别连接所述制动模拟量输入模块、转向模拟量输入模块、驱动模拟量输入模块、通信接口和电源输入接口,所述通信接口用于连接车载终端控制器;所述处理器用于接收制动模拟量输入模块、转向模拟量输入模块、驱动模拟量输入模块输入的制动模拟量、转向模拟量、驱动模拟量,并将接收到的制动模拟量、转向模拟量、驱动模拟量相应转换成制动控制指令、转向控制指令、驱动控制指令发送给车载终端控制器。
7.本实用新型的有益效果是:由于本实用新型的手持装置包括制动模拟量、转向模拟量和驱动模拟量输入模块,且手持装置能够通过通信接口连接车载终端控制器,由于因此当无人驾驶控制系统出现问题不能继续控制车辆时,车上安全员能够利用该手持装置实现对车辆的及时接管,实现对车辆的制动、转向和驱动等操作,提升车上安全员对车辆的安全控制能力,提高车辆行驶的安全性,保证安全员和车上乘客的安全。
8.进一步地,在上述无人驾驶汽车安全员手持装置中,所述制动模拟量输入模块为握力传感器,所述转向模拟量输入模块为旋钮开关,所述驱动模拟量输入模块为拨动开关。
9.这样做的有益效果是:采用握力传感器作为制动模拟量输入模块,通过采集安全
员的线性握力值,将握力值线性映射为车辆制动量来实现舒适的平缓制动,提升车辆制动时的舒适性。
10.进一步地,在上述无人驾驶汽车安全员手持装置中,所述手持装置包括手持部和端部,且手持部位于端部下方;所述握力传感器设置在手持装置的手持部侧面,所述拨动开关设置在手持装置的手持部正面,所述旋钮开关设置在手持装置的端部侧面。
11.这样做的有益效果是:握力传感器、拨动开关、旋钮开关的布置位置合理,方便操作。
12.进一步地,在上述无人驾驶汽车安全员手持装置中,所述手持装置还包括显示屏,所述显示屏连接所述处理器。
13.这样做的有益效果是:设置显示屏,能将车辆的重要状态信息(如车速、档位、方向盘转角、制动开度、制动减速度、车辆驾驶状态、定位信息、红绿灯信息、车辆故障状态等)通过显示屏进行直观显示,方便车上安全员实时了解车辆状态,提升车上安全员对车辆状态的了解能力,为安全员及时接管车辆做好准备。
14.进一步地,在上述无人驾驶汽车安全员手持装置中,所述手持装置还包括急停按钮,所述急停按钮连接所述处理器。
15.这样做的有益效果是:设置急停按钮,能够实现紧急停车。
16.进一步地,在上述无人驾驶汽车安全员手持装置中,所述手持装置还包括指示灯,所述指示灯连接所述处理器。
17.这样做的有益效果是:设置指示灯,能够通过不同的灯光颜色、闪烁方式向安全员提示车辆状态。
18.进一步地,在上述无人驾驶汽车安全员手持装置中,所述手持装置还包括语音播放模块,所述语音播放模块连接所述处理器。
19.这样做的有益效果是:设置语音播放模块,能够通过蜂鸣、语音方式向安全员提示车辆状态。
20.进一步地,在上述无人驾驶汽车安全员手持装置中,所述通信接口包括rs232、rj45、wifi通信接口中的至少一种。
21.这样做的有益效果是:手持装置支持多种通信接口,能够提高该手持装置的灵活适应能力。
22.进一步地,在上述无人驾驶汽车安全员手持装置中,所述手持装置还包括电源输出接口和dc/dc调压模块,所述dc/dc调压模块一端连接所述电源输入接口,另一端连接所述电源输出接口,所述处理器控制连接所述dc/dc调压模块。
23.这样做的有益效果是:手持装置设置电源输出接口,能够作为电源为其他设备模块供电。
附图说明
24.图1是本实用新型手持装置实施例中手持装置的结构示意图;
25.图2
‑
1是本实用新型手持装置实施例中手持装置的前视图;
26.图2
‑
2是本实用新型手持装置实施例中手持装置的后视图;
27.图2
‑
3是本实用新型手持装置实施例中手持装置的侧视图;
28.图2
‑
4是本实用新型手持装置实施例中手持装置的底视图;
29.图3是本实用新型手持装置实施例中手持装置和车载终端控制器双向通信的第一种实施方式;
30.图4是本实用新型手持装置实施例中手持装置和车载终端控制器双向通信的第二种实施方式;
31.图5是本实用新型手持装置实施例中手持装置和车载终端控制器双向通信的第三种实施方式;
32.图6是本实用新型手持装置实施例中手持装置和车载终端控制器双向通信的第四种实施方式;
33.图中,1是灯带,2是显示屏,3是拨动开关,4是手持部,5是可插拔电池,6是rs232通信接口,7是rj45通信接口,8是电源输出接口,9是急停按钮,10是旋钮开关,11是握力传感器,12是充电口,13是取电口。
具体实施方式
34.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。
35.手持装置实施例:
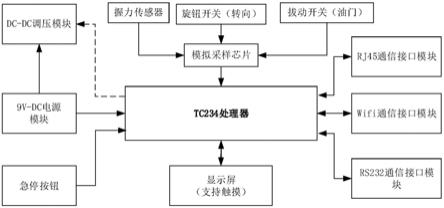
36.如图1所示,本实施例的无人驾驶汽车安全员手持装置(以下简称手持装置)包括:握力传感器(即制动模拟量输入模块)、旋钮开关(即转向模拟量输入模块)、拨动开关(即驱动模拟量输入模块)、通信接口(包括rs232、rj45、wifi通信接口)、电源输入接口和处理器(型号为tc234);处理器分别连接握力传感器、旋钮开关、拨动开关、通信接口和电源输入接口,通信接口用于连接车载终端控制器。
37.本实施例中采用握力传感器作为制动模拟量输入模块,能够利用握力传感器采集安全员的线性握力值(即制动模拟量),然后利用处理器将握力值线性映射为车辆制动量,由于采集的握力值是线性的,则映射得到的车辆制动量可以从零到最大制动量,从而可实现平滑的逐级制动,达到与传统制动刹车相同的制动感受,实现舒适的平缓制动,提升车辆制动时的舒适性;采用旋钮开关作为转向模拟量输入模块,通过旋钮开关输入转向模拟量,由处理器将输入的转向模拟量转换为车辆实际的转向控制指令,旋钮开关旋被转到不同位置代表控制车辆方向盘转动不同的角度;采用拨动开关作为驱动模拟量输入模块,通过拨动开关输入驱动模拟量,由处理器将输入的驱动模拟量转换为车辆实际的驱动控制指令,拨动开关被拨动到处于不同位置代表控制车辆打开不同的油门开度。
38.这样,在无人驾驶控制系统出现故障不能继续控制车辆时,通过握力传感器、旋钮开关、拨动开关相互配合,由处理器将输入的握力值、转向模拟量、驱动模拟量相应转换成制动控制指令、转向控制指令、驱动控制指令,并通过通信接口发送给车载终端控制器,进而由车载终端控制器将接收到的控制指令发送给整车控制器,由整车控制器控制车辆实现制动、转向、驱动等操作,实现人工移车,提升车上安全员对车辆的安全控制能力,提高车辆行驶的安全性,保证安全员和车上乘客的安全。
39.作为其他方式,制动模拟量输入模块、转向模拟量输入模块和驱动模拟量输入模块均可以选择其他方式实现,例如还可以将旋钮开关作为制动模拟量输入模块,此时旋钮
开关被旋转到不同位置代表控制车辆输出不同的制动力;还可以将拨动开关作为转向模拟量输入模块,此时拨动开关被拨动到不同位置代表控制车辆方向盘转动不同的角度;还可以将旋钮开关或握力传感器作为驱动模拟量输入模块,此时旋钮开关被旋转到不同位置或者握力传感器采集到不同的握力值代表控制车辆打开不同的油门开度。
40.如图1所示,本实施例中的手持装置具有多种通信接口,可根据车载终端控制器具有的通信接口,灵活选择手持装置与车载终端控制器的通信方式;作为其他实施方式,手持装置的通信接口的种类和数量均可以根据实际需要调整。
41.本实施例的手持装置还包括显示屏,手持装置能够通过通信接口连接车载终端控制器,从车载终端控制器中获取车辆的重要状态信息(如车速、档位、方向盘转角、制动开度、制动减速度、车辆驾驶状态、定位信息、红绿灯信息、轨迹规划、车辆故障状态等),并能将车辆的重要状态信息通过显示屏进行直观显示,方便车上安全员实时了解车辆状态,提升车上安全员对车辆状态的了解能力,为安全员及时接管车辆做好准备。当然,即使手持装置不设置显示屏,车上安全员也可以结合道路交通情况、车辆行驶情况和个人经验对是否接管车辆进行主观判断,例如当车辆继续加速行驶会与前方车辆发生碰撞时,安全员可以通过手持装置上的握力传感器、旋钮开关控制车辆进行制动、转向操作。
42.本实施例中的手持装置还包括急停按钮,急停按钮连接处理器,能够实现紧急停车功能。
43.本实施例中的手持装置还包括指示灯,指示灯连接处理器,本实施例中指示灯为设置在显示屏四周的灯带,可以通过不同的灯光颜色(红、黄、绿等)、闪烁方式向安全员提示车辆状态。
44.本实施例的手持装置还包括语音播放模块(包括蜂鸣器或喇叭),语音播放模块连接处理器,可通过蜂鸣、语音方式向安全员提示车辆状态。
45.本实施例中的手持装置还包括dc/dc调压模块和电源输出接口,dc/dc调压模块一端连接电源输入接口,另一端连接电源输出接口,处理器控制连接dc/dc调压模块,手持装置还设置有用于放置电池的凹槽,电源输入接口用于连接电池。由于显示屏支持触摸,能够通过显示屏给dc/dc调压模块下达命令,dc/dc调压模块将电池原始电压进行转换通过手持装置的电源输出接口提供5v
‑
12v的供电输出,以方便给其他设备模块供电,例如为rs232转无线等通信模块进行供电,由于能通过显示屏控制电源输出接口输出电压的大小,手持装置具有多电平转换功能。
46.结合图2
‑
1至图2
‑
4所示,本实施例的手持装置包括手持部4和端部,且手持部4位于端部下方;握力传感器11设置在手持装置的手持部4侧面,拨动开关3设置在手持装置的手持部4正面,显示屏2设置在手持装置的端部正面,显示屏2四周设置有灯带1,通信接口(rs232通信接口6和rj45通信接口7)设置在手持装置的端部背面,手持装置的端部背面还设置有电源输出接口8,急停按钮9设置在手持装置的端部侧面,旋钮开关10设置在手持装置的端部侧面并位于急停按钮9的下方。手持部4背面还设置有用于放置可插拔电池5的凹槽,可插拔电池5为锂电池,用来给手持装置提供9v
‑
dc供电,同时电池支持插拔更换,以方便更换备用电池,同时电池本身具有9v
‑
dc取电口13,可直接为其他设备模块进行供电,电池本身具有充电口12,电池充电时可取下充电,也可以装在手持装置上充电。需要说明的是:本实施例中手持装置的各部件按照图2
‑
1至图2
‑
4所示布置,符合使用习惯,布置更加合
理,方便操作;作为其他实施方式,手持装置中各部件的布置位置可以根据实际需要调整,不局限于图2
‑
1至图2
‑
4所示。
47.结合图3至图6可以看出,手持装置与车载终端控制器之间的双向通信有多种实现方式,具体如下:
48.如图3所示,手持装置和车载终端控制器之间可通过4线或8线以太网进行有线直连通信,或者通过rs232串口线进行有线直连通信;
49.如图4所示,手持装置和车载终端控制器之间可通过rs232转can模块建立双向通信;
50.如图5所示,手持装置和车载终端控制器之间可通过rs232转无线(如蓝牙、2.4g无线等)模块和无线转rs232模块建立双向通信;
51.如图6所示,手持装置和车载终端控制器可接入到车内的wifi网络,通过以太网(以太网有线直连或wifi连接)建立双向通信。
52.综上所述,手持装置和车载终端控制器兼容多种通信方式,能够提高手持装置的场景适应能力。
53.其中,车载终端控制器中集成有车载终端程序,当然车载终端程序也可以运行在现有某个车载控制器中,车载终端控制器具有如下功能:
54.(1)可与无人驾驶控制器和整车控制器等设备通过can或以太网通信,获取整车控制器采集的车辆运行状态数据(如车速、档位、方向盘转角、制动开度、制动减速度等)和无人驾驶控制器采集的车辆信息和无人驾驶控制系统状态信息(如车辆驾驶状态、轨迹规划、车辆故障状态、无人驾驶控制器故障状态等),并将这些信息发送给手持装置进行显示和提醒。
55.(2)可接收手持装置的控制命令(如转向、驱动、制动等),并通过can或以太网发送给整车控制器(作为其他实施方式,也可以同时发生给整车控制器和无人驾驶控制器),实现对车辆的控制,实现移车等功能。
56.(3)支持通过rs232、can、以太网通信协议与手持装置进行双向通信,根据车载终端控制器具有的通讯接口进行灵活选用。
57.综上所述,本实施例提供了一种功能完善、方便使用的手持装置,解决了无人驾驶车辆的车端安全员缺乏运维工具的问题,可以提升安全员对车辆的状态了解和监控能力,当车辆无人驾驶控制系统故障时实现对车辆的控制,提升车辆制动时的舒适性,提高安全员和车上乘客的安全性。并为手持装置和车载终端控制器间设计了灵活的通信方式,支持多种通信接口,支持rs232有线直连、rj45以太网有线直连,支持wifi无线连接,支持rs232转can和rs232转无线模块等方式,具有较强的灵活适应能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1