充电桩及通信系统的制作方法
1.本实用新型涉及机器人技术领域,特别涉及一种充电桩及通信系统。
背景技术:
2.服务机器人正逐步替代部分人工的工作。目前,已将机器人广泛应用于餐厅、酒店、医院、政府机构等场景中,提供配送、引导等服务。应用于上述场景中的机器人需要克服使用场地的限制,进行无轨道移动。机器人具有电源系统,当电量消耗后,需要对电源系统及时进行充电。目前,机器人与充电桩之间的通信仍然需要在机器人上设置通信组件,增加了制造成本。
技术实现要素:
3.本实用新型有鉴于上述的现有状况而完成的,其目的在于提供一种充电桩及通信系统,机器人和充电桩之间的通信与充电可共用接口,无需额外的通信线缆,从而降低成本。
4.为了实现上述目的,本实用新型实施方式提供如下技术方案:
5.本实用新型提供一种充电桩,所述充电桩包括供电模块、充电公接口以及检测模块,所述检测模块与所述充电公接口电连接,所述充电公接口与所述供电模块电连接,所述充电桩具有充电模式和通信模式,所述检测模块用于接收特征信号并判断所述特征信号是否符合预设条件,当符合预设条件时所述检测模块输出充电信号给所述充电公接口,所述充电公接口使所述供电模块切换为所述充电模式,当不符合所述预设条件时,所述检测模块输出通信信号给所述充电公接口,所述充电公接口与所述供电模块断开连接。
6.其中,所述充电公接口包括电刷。
7.其中,所述特征信号为持续时间的低电平,所述检测模块在指定时间检测到所述持续时间的低电平后,所述充电桩切换为所述通信模式。
8.其中,所述持续时间为50
‑
60μs。
9.本实用新型还提供一种通信系统,包括如上所述的充电桩,所述通信系统还包括机器人,所述机器人包括收电板和充电母接口,所述充电母接口与所述收电板电连接,所述充电母接口与所述充电公接口电连接,所述收电板发送所述特征信号。
10.其中,所述收电板包括微控制单元,所述微控制单元用于解析所述充电桩与所述机器人之间的通信协议,并控制所述机器人与所述充电桩之间的连接切换为所述通信模式或者所述充电模式。
11.其中,所述机器人还包括寄存器,所述寄存器用于存储所述机器人的识别信息,在所述通信模式下,所述检测模块读取所述识别信息并检测所述识别信息与所述充电桩是否匹配。
12.其中,所述识别信息与所述充电桩匹配时,所述机器人与所述充电桩之间的连接切换为所述充电模式。
13.根据本实用新型所提供的充电桩及通信系统,通过检测模块检测特征信号以切换充电桩与机器人之间为充电模式或者通信模式,实现了接口的复用。
附图说明
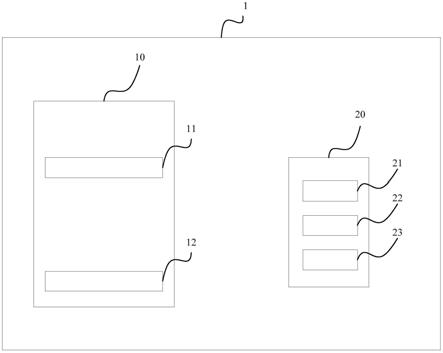
14.图1示出了本实用新型所涉及的通信系统的构成示意图。
具体实施方式
15.以下,参考附图,详细地说明本实用新型的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
16.本实用新型实施方式涉及一种充电桩,所述充电桩用于为机器人充电。所述充电桩20包括供电模块21、充电公接口22以及检测模块23(参见图1)。所述检测模块23与所述充电公接口22电连接。所述充电公接口22与所述供电模块21电连接。所述充电桩20具有充电模式和通信模式。所述检测模块用于接收特征信号并判断所述特征信号是否符合预设条件。当符合所述预设条件时所述检测模块输出充电信号给所述充电公接口,所述充电公接口使所述供电模块切换为所述充电模式;当不符合所述预设条件时,所述检测模块输出通信信号给所述充电公接口,所述充电公接口与所述供电模块断开连接。在所述特征信号符合条件时,所述充电桩与所述机器人的连接切换为所述通信模式。在这种情况下,通过检测模块检测特征信号以切换充电桩与机器人之间为充电模式或者通信模式,实现了接口的复用。
17.在本实施方式中,所述充电公接口22包括电刷。
18.在本实施方式中,所述特征信号为持续时间的低电平。所述检测模块23在指定时间检测到所述持续时间的低电平后,所述充电桩20切换为所述通信模式。所述机器人10向所述充电桩20传输数据。由此,通过检测模块判定后,机器人与充电桩建立通信连接。
19.在一些示例中,所述数据可以为字符串。字符串可以包含机器人10的识别信息。由此,检测模块可以对机器人识别信息进行判断,已确定是否能够与机器人建立充电连接。
20.在一些示例中,优选地,指定时间为1s。所述检测模块23在指定时间未收到所述低电平,则判定为无机器人与充电桩对接。
21.在本实施方式中,优选地,所述持续时间为50
‑
60μs。
22.如图1所示,本实用新型还涉及一种通信系统1。所述通信系统1包括如上所述的充电桩20。关于充电桩20的具体实施方式,在此不做赘述。所述通信系统1还包括机器人10。所述机器人10包括收电板11和充电母接口12。所述充电母接口12与所述收电板电11连接,所述充电母接口12与所述充电公接口22电连接。所述收电板11发送所述特征信号。在这种情况下,通过检测模块检测特征信号以切换充电桩与机器人之间为充电模式或者通信模式,实现了接口的复用。
23.在一些示例中,所述收电板11包括微控制单元(mcu)。所述微控制单元用于解析所述充电桩20与所述机器人10之间的通信协议,并控制所述机器人10与所述充电桩20之间的连接切换为所述通信模式或者所述充电模式。
24.在一些示例中,机器人10与充电桩20对接后,经过第一持续时间,机器人释放mcu
电源,完成复位操作。在此期间,充电桩20对mcu无电源供电。优选地,第一持续时间可以是200ms。经过第二持续时间,充电桩20实时查询是否接收到持续50~60us低电平,如果在所述第二持续时间内未接收到该低电平则判定为无机器人对接充电桩,否则所述充电桩20与所述机器人10的连接切换为所述通信模式。所述机器人10向所述充电桩20传输数据。
25.在一些示例中,在所述通信模式,所述充电桩20的输出电压为8
‑
13v,最大输出电流为30ma。由此,保障电路在通信模式下的安全性。
26.在一些示例中,在所述充电模式,所述充电桩20的输出电压为15
‑
30v,最大输出电流为10a。由此,以满足机器人的充电要求。
27.在本实施方式中,所述机器人10还包括寄存器。所述寄存器用于存储所述机器人10的识别信息。在所述通信模式下,所述检测模块23读取所述识别信息并检测所述识别信息与所述充电桩是否匹配。所述识别信息与所述充电桩匹配时,所述机器人10与所述充电桩20之间的连接切换为所述充电模式。
28.在一些示例中,机器人10与充电桩20对接后,可以先进入所述通信模式,再切换至所述充电模式。
29.在一些示例中,寄存器可以为虚拟寄存器。寄存器可以设置于微控制单元。
30.在本实施方式中,充电桩20可以向寄存器写指令,充电桩20可以读取寄存器的数据。
31.在一些示例中,机器人10可以具有应用层。应用层用于执行任务。充电桩20通过寄存器将指令发送至机器人10的应用层。具体而言,机器人10的收电板11协议栈在收到指令并将寄存器值发送给充电桩20后将通知应用层。
32.以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同更换和改进等,均应包含在该技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1