远程照明系统及其操作方法与流程
远程照明系统及其操作方法
1.相关申请的交叉引用
2.本技术要求于2019年6月3日提交的美国临时专利申请第62/856,222号的权益,其公开内容通过引用结合于此。
技术领域
3.能够操作以与车辆上的对应照明一致的远程照明,以及操作该照明的方法。特别地,一种照明系统,该照明系统可附接到安全头盔并且能够以对应于诸如摩托车的动力户外车辆上的照明;以及该照明系统的使用方法。
背景技术:
4.摩托车和动力户外骑行对一些人来说是必要的交通工具,而对另一些人来说是愉快的消遣。无论动力户外骑行是出于必要,还是作为业余爱好,它都是危险的交通工具。
5.摩托车骑行中的主要风险之一是追尾或侧部碰撞的风险,即摩托车骑车人被另一辆车从后部或侧部撞上的风险。附加地,摩托车通常只包括安装在地面上方仅两到三英尺处的单个阵列的行车灯、制动灯和信号灯。这与客车和卡车照明形成对比,客车和卡车照明通常在地面上方3到4英尺处以分离的左/右灯对的形式提供,并且通常由中央高位制动灯(chmsl)加强,这是根据1986年以来制造的乘用车的法律强制性规定的。
6.已经尝试通过提供远程操作的辅助灯或照明系统来增加摩托车和骑车人的可见度,该辅助灯或照明系统可以由摩托车的骑车人佩戴,通常安装在骑车人的安全头盔的背部。例如,werner等人共同拥有的美国专利7,218,214公开了一种通过无线磁场反向散射信号通信远程操作的辅助安全照明系统,该专利的公开内容通过引用结合于此。其他专利和所公布的专利申请也公开了远程操作的照明。附加地,一些摩托车头盔远程照明产品已被引入商业市场。
7.获得新产品的大众市场认可是具有挑战的。在当今“互联”的世界中,客户希望他们购买的产品(包括为摩托车头盔购买辅助远程照明系统)立即实现简单性和多功能性。这种系统的关键客户需求是它与他们拥有的特定摩托车兼容,并且很容易将系统部件安装在他们的摩托车和头盔上。安装程序应要求最低限度的机械和电气技能。
8.与这种需求一致的是提供容易地适于当前使用的绝大多数摩托车的单个辅助远程照明系统的强烈偏好。这是期望的,以便以较大的量制造这种系统,使得制造成本足够低,从而能够实现摩托车骑车人愿意支付的零售购买价格。如果照明系统制造商不得不为路上的每一个品牌和型号的摩托车制造分离的单元,那么需要为此付出的努力将会令人怯步,并且单个产品的制造成本可能太高而无法在市场上取得成功。
9.客户还希望有“智能”设备,即具有内置智能能力的设备,这些能力提供了以前在简单的模拟设备中不太可能的优势。在应用于摩托车头盔的辅助远程照明系统时,客户希望该系统中具有附加安全特征和属性。客户还希望有适于他/她将照明系统设置在他/她的摩托车上的方式的照明系统。
技术实现要素:
10.根据本公开,提供了能够与车辆的照明系统结合操作的头盔的辅助照明系统、以及使用这种系统的方法,其满足前述需求。
11.在本公开的一个方面中,提供了一种能够与包括车辆制动灯的车辆的照明系统结合操作的头盔的第一辅助照明系统。辅助照明系统包含头盔部分和车辆部分。
12.头盔部分包含:头盔电源;头盔照明单元,该头盔照明单元连接到电源并包括头盔制动灯;微控制器,该微控制器连接到电源并与头盔制动灯进行信号通信;以及头盔收发器,该头盔收发器与微控制器进行信号通信。车辆部分包含:车辆部分支撑体,该车辆部分支撑体可安装在车辆上;车辆收发器,该车辆收发器与头盔收发器进行无线信号通信;以及车辆加速度计,该车辆加速度计连接到车辆部分支撑体并与微控制器进行信号通信。车辆收发器可以接合到支撑体。车辆加速度计能够操作以发送指示加速度计相对于地球的重力场的相对位置的信号。
13.微控制器利用算法编程,使得当被执行时,微控制器接收指示加速计的相对位置的信号,基于指示加速计的相对位置的信号确定加速计检测车辆相对于地球的加速度的性能能力,以及向辅助照明系统的用户呈现加速计的性能能力的指示。
14.系统的车辆部分还可以包含车辆加速度计性能指示器。在这种情况下,车辆加速度计的性能能力的指示可以呈现在车辆加速度计性能指示器上。替代性地,车辆加速度计性能指示器可以通过移动设备的显示屏虚拟地呈现给用户。
15.头盔部分还可以包含头盔部分支撑体和头盔加速度计,该头盔加速度计接合到头盔部分支撑体并与微控制器进行信号通信。头盔加速度计能够操作以发送指示头盔部分支撑体相对于头盔的向上位置或头盔部分支撑体相对于头盔的向下位置的信号。在一个实例中,微控制器可以利用算法编程,使得当被执行时,微控制器接收指示头盔部分支撑体相对于头盔的向上或向下位置的信号。如果头盔部分支撑体处于向上位置,则算法指令微控制器在车辆左信号灯点亮时使得头盔照明单元的第一头盔信号灯被点亮,并在车辆右信号灯点亮时使得头盔照明单元的第二头盔信号灯被点亮。如果头盔部分支撑体处于向下位置,则算法指令微控制器在车辆右信号灯点亮时使得第一头盔信号灯被点亮,并在车辆左信号灯点亮时使得第二头盔信号灯被点亮。在另一实例中,微控制器可以利用算法编程,使得当被执行时,微控制器接收指示头盔部分支撑体相对于头盔的位置的信号,并且如果头盔部分支撑体处于向下位置,则算法指令微控制器操作系统的头盔部分的警报设备。
16.在本公开的另一方面中,提供了为能够与包括车辆制动灯的车辆的照明系统结合操作的头盔安装辅助照明系统的第一方法。辅助照明系统可以包含头盔灯部分和车辆灯部分。头盔灯部分可以包括头盔照明单元,该头盔照明单元包含制动灯、与头盔制动灯信号通信的微控制器和与微控制器信号通信的头盔收发器。车辆部分可以包括:车辆部分支撑体;车辆收发器,该车辆收发器与头盔收发器进行无线信号通信;以及车辆加速度计,该车辆加速度计连接到车辆部分支撑体并与微控制器进行信号通信。车辆加速度计能够操作以发送指示车辆部分支撑体相对于地球重力场的相对位置的信号。
17.对于这种照明系统,该方法包括将车辆部分支撑体安装在车辆上,并且基于来自车辆加速度计的信号,确定加速度计检测车辆相对于地球的加速度的性能能力。该方法还可以包括向辅助照明系统的用户呈现加速度计的性能能力的指示。该方法还可以包括:旋
转车辆和系统的车辆部分,利用车辆加速度计检测旋转、将代表旋转的信号从加速度计递送到微控制器,以及基于该信号提高加速度计的性能。
18.在本公开的另一方面中,提供了一种能够与包括车辆左信号灯和车辆右信号灯的车辆的照明系统结合操作的头盔的第二辅助照明系统。辅助照明系统包含头盔部分,该头盔部分包括头盔部分支撑体、头盔照明单元、微控制器和头盔加速度计。头盔照明单元安装在头盔部分支撑体上,并包含第一头盔信号灯和第二头盔信号灯。微控制器与第一头盔信号灯和第二头盔信号灯进行信号通信。头盔加速度计接合到头盔部分支撑体,并与微控制器进行信号通信,并能够操作以向微控制器发送指示头盔部分支撑体相对于头盔的向上位置或头盔部分支撑体相对于头盔的向下位置的信号。微控制器利用算法编程使得当执行时,如果来自加速度计的信号指示头盔部分支撑体的向上位置,则微控制器在车辆左信号灯点亮时使得第一头盔信号灯被点亮,并且微控制器在车辆右信号灯点亮时使得第二头盔信号灯被点亮。
19.算法可以包括指令,使得当执行时,如果来自加速度计的信号指示头盔部分支撑体的向下位置,则微控制器在车辆右信号灯点亮时使得第一头盔信号灯被点亮,并且微控制器在车辆左信号灯点亮时使得第二头盔信号灯被点亮。该算法可以包括指令,使得当执行时,如果来自加速度计的信号指示头盔部分支撑体的向下位置,则该算法指令微控制器操作辅助照明系统的警报设备。辅助照明系统还可以包含与微控制器进行信号通信的头盔收发器以及车辆部分,该车辆部分包含与头盔收发器进行无线信号通信的车辆收发器。
20.在本公开的另一方面中,提供了安装能够与包括车辆左信号灯和车辆右信号灯的车辆的照明系统结合操作的头盔的辅助照明系统的第二方法。辅助照明系统可以包含:头盔灯部分,该头盔灯部分包括头盔照明单元,该头盔照明单元包含头盔部分支撑体、安装在头盔部分支撑体上的第一头盔信号灯和第二头盔信号灯、与第一头盔信号灯和第二头盔信号灯进行信号通信的微控制器、与微控制器进行信号通信的头盔收发器、以及接合到头盔部分支撑体并与微控制器进行信号通信的头盔加速度计。头盔加速度计能够操作以发送指示头盔部分支撑体相对于头盔的向上位置或头盔部分支撑体相对于头盔的向下位置的信号。
21.对于这种照明系统,该方法包括将头盔部分支撑体安装在头盔上;以及基于来自头盔加速度计的信号,检测头盔部分支撑体是处于向上位置还是向下位置。如果检测到头盔部分支撑体处于向上位置,该方法还可以包括在车辆左信号灯点亮时使得第一头盔信号灯被点亮,并在车辆右信号灯点亮时使得第二头盔信号灯被点亮。如果检测到头盔部分支撑体处于向下位置,该方法还可以包括在车辆右信号灯点亮时使得第一头盔信号灯被点亮,并在车辆左信号灯点亮时使得第二头盔信号灯被点亮。替代性地,如果检测到头盔部分支撑体处于向下位置,该方法还可以包括操作辅助照明系统的警报设备。
附图说明
22.将参考以下附图来提供本公开,其中相同的附图标记指代相同的元件,并且其中:
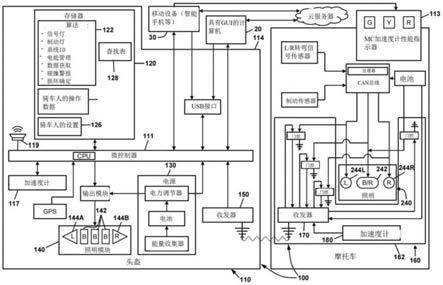
23.图1是本公开的示例性头盔安全照明系统的框图;
24.图2是照明系统的摩托车部分在摩托车上的示例性安装位置和取向的示意图;
25.图3是描绘安装能够与车辆的照明系统结合操作的头盔的辅助照明系统的方法的
流程图,包括优化该系统的车辆加速度计的性能;
26.图4a是在图3的方法的初始步骤期间摩托车的后视图;
27.图4b是在图3的方法的后续步骤期间摩托车的后视图;
28.图5a是安全头盔的后视图,其中本公开的照明系统安装处于“向下”或“倒置”位置;
29.图5b是安全头盔的后视图,其中本公开的照明系统安装处于“向上”或“正面朝上”的位置;以及
30.图6是描述基于安装在头盔上的头盔照明单元的取向来限定照明系统的头盔照明单元的适当的左和右转向信号操作的方法的流程图。
31.将结合某些优选实施例描述本发明。然而,应当理解,并不打算将本发明限制于所描述的实施例。相反,本发明旨在覆盖由所附权利要求限定的本发明的精神和范围内可能包括的所有替代性方案、修改和等同物。
具体实施方式
32.为了全面理解本公开,参考附图。在附图中,相同的附图标记始终用于表示相同的元件。附图被认为是示例性的,并且仅用于说明的目的。附图中反映的尺寸、位置、顺序和相对大小可能不同。
33.本公开的照明系统在其作为远程照明系统的用途的背景下进行描述,其中的任何一个可以嵌入或接合到摩托车头盔中,并且包括能够操作以与摩托车上的相应照明元件相对应的照明元件。然而,本公开的任何远程照明系统不应被解释为仅限于在摩托车头盔上使用。远程照明系统可以佩戴在骑车人身上的其他地方,诸如骑车人的脖子区域以下的夹克上。附加地,远程照明系统及其使用方法适用于其他车辆,并且特别是“动力户外”车辆。如本文所用,术语“动力户外车辆”包括但不限于摩托车、踏板车、全地形车(atv)、个人水上运输工具(“摩托艇”)和雪地摩托。
34.附加地,远程照明系统适用于期望以对应于物体上的主照明的方式提供远程照明的任何用途。关于车辆应用,远程照明系统也适用于车辆牵引应用。正在被牵引的车辆(诸如不工作的汽车,或者缺少自身照明的拖车)可以使得本公开的远程照明系统临时附接到其上,并且为了更安全的牵引而变得更加可见。
35.附加地,本文提供的描述可以利用形容词“顶部”、“上部”、“底部”、“下部”、“左侧”、“右侧”等来标识某些部件。这些形容词是在安全头盔上使用远程照明系统的背景下,以及在附图的取向的背景下提供的。除非另有说明,否则该描述不应被解释为限制远程照明系统在特定空间取向上使用。本系统可以在除了本文所示和所述的那些取向之外的取向上使用。
36.还应当理解的是,本文使用的任何连接参考(例如,附接、耦接、连接和接合)应当被广义地解释,并且可以包括元件的集合之间的中间构件和元件之间的相对移动,除非另有说明。因此,连接参考不一定意味着两个元件直接连接并且彼此固定。
37.术语“提供”(诸如“提供头盔”等)如果在权利要求中叙述,则不旨在要求所提供项的任何特定递送或接收。相反,出于清楚和易于阅读的目的,术语“提供”仅用于叙述将在权利要求的后续元素中提及的项。
38.图1是本公开的示例性头盔安全照明系统的框图。系统100在附图中描绘,并且现在将描述与摩托车(作为用于与系统100一起使用的示例性车辆)一起使用。图1的系统类似于如共同拥有的pct申请号us2018/035547(
“‘
547申请”)中所示的图3b的系统,该申请的公开内容通过引用结合于此。其他头盔安全照明系统可以适于作为根据本公开的系统(包括
‘
547申请的图3a和图3c中的以及其中描绘的系统)来操作。
39.参考图1,辅助照明系统100包含头盔部分110和车辆部分160。头盔部分110包含:头盔电源130;头盔照明单元140,该头盔照明单元连接到电源130并包括头盔制动灯142;以及微控制器111,该微控制器连接到电源130并通过头盔收发器150与制动灯142进行信号通信。头盔部分110还可以包含与微控制器111进行信号通信的第一头盔信号灯144a和第二头盔信号灯144b。车辆部分160包含可安装在车辆(例如,图2的摩托车10)上的车辆部分支撑体162、接合到支撑体162并与头盔收发器150进行无线信号通信的车辆收发器170、以及接合到车辆部分支撑体162并与收发器170进行信号通信的车辆加速度计180。可安装在车辆上的车辆部分支撑体162可以是刚性印刷电路板,车辆收发器170和车辆加速度计180接合到该刚性印刷电路板。替代性地,车辆部分支撑体162可以是刚性材料块,车辆收发器170和车辆加速度计180封装或嵌入该刚性材料块中。替代性地,车辆部分支撑体162可以是刚性材料板,车辆收发器170和车辆加速度计180安装在该刚性材料板上。在系统100的其他实例中(未示出),头盔部分110的微控制器111可以提供为车辆部分160上的部件,其中车辆部分160和头盔部分110之间的无线通信相应地适配,使得头盔部分110上的灯142、144a和144b能够如本文所述操作。
40.在照明系统100的开发中,已经发现,在照明系统的车辆部分160(即摩托车部分160)的支撑体162的安装位置的选择方面有很大的可变性。一个原因是摩托车的结构方面有很大的可变性,并且因此摩托车部分安装位置方面有很大的可变性。另一原因是,两个客户可能具有相同的摩托车品牌和型号,但是选择在他们的摩托车上不同地安装他们各自的摩托车部分160。尽管有各种可能的安装位置,但期望的是客户不能错误地设置照明系统,使得其无法操作。
41.图2是照明系统100的摩托车部分在摩托车10上的一些示例性安装位置和取向的示意图。摩托车部分160a安装到座椅12的后部区段上并在其下方。摩托车部分160b安装到摩托车框架14上,位于座椅12的中心区段下方。摩托车部分160c安装到摩托车框架14上,位于油箱16的后部区段下方。摩托车部分160d安装到摩托车框架14的下侧,位于油箱16的中心区段下方。摩托车部分160e安装到摩托车框架14的下侧,位于油箱16的前向区段下方。摩托车部分160a至160e中的每一个具有指示相对取向的箭头。摩托车部分160b和160c具有相对向上取向,并且摩托车部分160a、160d和160e具有相对向下方向。根据特定摩托车的结构,其他安装布置也是可能的,包括安装在基本竖直的表面上,而不是图2中示出的基本水平的表面上。制造为市场上的每种品牌和型号的摩托车配置的定制照明系统是不切实际的,并且不可能预测客户将如何在他们的摩托车上安装照明系统方面的可变性。
42.因此,已经发现,摩托车部分安装位置和取向方面的这种广泛变化带来了问题。在提供本公开的照明系统100时,车辆加速度计180可以用于检测减速(即负加速度),并且在这种情况下,向微控制器递送信号,使得头盔灯单元上的制动灯被点亮,如前述
‘
547申请中所公开的那样。
43.在使用典型的加速度计时,假设加速度计将以相对于地球重力场的特定取向刚性安装在支撑体上。为了使加速度计发挥最佳作用,或者在某些情况下为了在检测安装有加速度计的物体的加速度时正确地起作用,需要这种安装布置。期望的安装位置可以被认为是加速度计“默认位置”44.在本公开的照明系统100中,如果车辆部分160的支撑体162(和车辆加速度计180)安装在向上位置,诸如对于图2的摩托车部分160b,加速度计默认位置将出现。然而,如果车辆部分160(和车辆加速度计180)安装在替代性位置,诸如对于图2的摩托车部分160a、160c、160d或160e,出现问题:在这种情况下,指示相对车辆部分支撑体和加速度计180的位置的信号可能不再正确和/或强度不足以用于控制头盔部分100的照明单元140。因此,摩托车加速度计180在检测摩托车的加速度时的性能能力可能会受到损害或变得不工作。
45.在本公开的一方面中,上述问题可以通过提供加速度计性能指示器113,并基于加速度计性能指示器113的指示选择车辆部分支撑体162的满意位置来解决。由头盔部分110的微控制器111执行的算法包括分析来自车辆加速度计180的信号并确定信号是否足以能够准确确定系统100的摩托车部分160的加速度(并因此确定摩托车10的加速度)的指令。加速度计180的可能性能可以由加速度计性能指示器113示出。因此,在系统100的摩托车部分160的设置中,用户可以将摩托车部分支撑体162和加速度计180移动到摩托车10上的各种可能的安装位置,诸如图2所示的那些位置,并且基于来自加速度计性能指示器113的指示来选择位置。
46.在一种情况下,加速度计性能指示器113可以安装在摩托车部分支撑体162上。这种加速度计性能指示器113可以包含指示可能的良好、一般和较差的加速度计性能的指示器灯,诸如绿色、黄色和红色。在另一情况下,加速度计性能指示器113可以作为图像提供在与微控制器111通信的移动设备30的显示器上。当用户将摩托车部分支撑体162和加速度计180移动到摩托车10上的各种可能的安装位置时,移动设备显示器上的加速度计性能指示器113可以指示相对加速度计性能。
47.在又一情况下,系统100的摩托车10和摩托车部分160的虚拟模型可以以软件的形式提供在移动设备上。移动设备上的软件能够操作以使用户能够通过合适的输入,即触摸屏,操纵系统100的摩托车部分160在摩托车10上的虚拟位置。因此,系统的用户可以研究实际的摩托车10,并选择摩托车部分支撑体162和加速度计180的可能的期望位置,然后在虚拟模型中将系统100的摩托车部分160在摩托车上的虚拟位置操纵到相对应的可能的期望位置。由微控制器111执行的算法可以包括分析存储在存储器120中的查找表128的指令,该查找表包含关于作为加速度计180的位置的函数的来自车辆加速度计180的信号的数据。因此,用户可以确定可能的期望位置是否能够实现令人满意的加速度计性能。
48.在本公开的另一方面中,上述问题可以通过在将系统的摩托车部分160安装在摩托车10上的期望位置之后,并且在使用照明系统100来操作头盔照明单元140的制动灯142之前,将系统100置于“教学”模式来解决。参考图3最佳地理解这一点,图3是描述安装能够与车辆的照明系统结合操作的头盔的辅助照明系统的方法300的流程图。该方法包括基于安装在摩托车10上的照明系统100的摩托车部分160的取向来优化车辆加速度计180的性能的步骤。
49.方法300包括标识310用于将摩托车部分支撑体162安装在摩托车10上的合适位
置,以及将支撑体162安装320在这个位置。系统100的摩托车部分160连接330到摩托车电源、接地、制动以及左和右转向信号线路。然后,系统100的摩托车部分160和头盔部分110被供电340。
50.如图4a所示,摩托车10优选地处于“中立位置”,即相对于地球2(以及相对于其引力场)直立向上,发起350摩托车部分教学模式。这可以通过对系统执行特定的预定输入来完成,诸如通过例如向系统100供电。微控制器111被编程为通过输出通信来指示系统100处于教学模式,诸如快速连续闪烁照明单元140的灯142、144a和144b四次,或者从扬声器119发出一系列快速啁啾声(例如,开/关之间的少于一秒的停留时间)。替代性地,如果系统100被放置成与诸如智能电话的移动设备30通信,或者与计算机20通信,则可以经由该设备输入发起教学模式命令。
51.一旦已经将系统100置于教学模式同时摩托车10处于中立位置,摩托车10被倾斜,即向左旋转360度(如从摩托车的后部观察那样),如图4b所示。在某些情况下,向左倾斜大约15度就足够了,这在摩托车10搁置在典型的侧支架18上时通常是典型的倾斜量。在摩托车10向左倾斜的情况下,可以基于来自车辆加速度计180的信号记录370摩托车部分支撑体162相对于摩托车10的位置。根据编程到微控制器中的算法,同时已知摩托车向左倾斜,微控制器111然后执行指令以确定380摩托车上的摩托车位置支撑体162和加速度计180的位置。当已经根据算法确定380时,可以发出照明单元140的第二系列闪光和/或来自扬声器119的啁啾声,从而指示教学模式完成。随后,基于这个确定,当使用系统时,该算法还包括计算390摩托车部分支撑体162(和摩托车10)的加速度的指令,其中考虑了摩托车位置支撑体162和加速度计180在摩托车10上的位置相对于默认位置的变化。应当理解的是,该算法可以基于在向右位置、向前位置或向后位置倾斜摩托车。然而,由于大多数摩托车支架允许摩托车在稳定位置向左倾斜,因此算法中的向左倾斜在本文中被描述为示例性情况。
52.还应该理解的是,虽然已经针对常规两轮摩托车描述了上述方法,但是该方法也适用于其他车辆,包括但不限于三轮摩托车、倒三轮摩托车(诸如由加州魁北克省瓦尔科特的brp公司制造的can-am spyder)、跨斗摩托车、雪地摩托和摩托艇。使车辆向左倾斜的方法将根据其结构的需要而变化。对于摩托艇来说,它可以相对于其漂浮水面(而不是在坚实的地面或拖车上)向左倾斜。
53.在本公开的另一方面中,提供了一种能够与包括车辆左信号灯和车辆右信号灯的车辆的照明系统结合操作的头盔的辅助照明系统。再次参考图1,辅助照明系统100可以包含头盔灯部分110,该头盔灯部分包括头盔照明单元140,该头盔照明单元包含第一头盔信号灯144a和第二头盔信号灯144b、与第一头盔信号灯144a和第二头盔信号灯144b进行信号通信的微控制器111、与微控制器111进行信号通信的头盔收发器150、头盔部分支撑体114、以及接合到头盔部分支撑体114并与微控制器111进行信号通信的头盔加速度计117。头盔部分支撑体114可以是头盔收发器150和头盔加速度计117所接合的印刷电路板、材料块或材料板。头盔加速度计117能够操作以发送指示头盔部分支撑体114相对于头盔处于向上位置或头盔部分支撑体114相对于头盔处于向下位置的信号。
54.微控制器111能够操作以执行算法。该算法可以包括指令,使得当执行时,如果来自加速度计117的信号指示头盔部分支撑体114的向上位置,如图5b所示,则微控制器111在车辆左信号灯点亮时使得第一头盔信号灯144a被点亮,并且微控制器111在车辆右信号灯
点亮时使得第二头盔信号灯144b被点亮。该算法还可以包括指令,使得当执行时,如果来自加速度计117的信号指示头盔部分支撑体114的向下位置,如图5a所示,则微控制器111在车辆右侧信号灯点亮时使得第一头盔信号灯144a被点亮,并且微控制器111在车辆左侧信号灯点亮时使得第二头盔信号灯144b被点亮。该算法可以包括指令,使得当执行时,如果来自加速度计111的信号指示头盔部分支撑体114的向下位置,则该算法指令微控制器111操作报警设备,诸如辅助照明系统的音频扬声器119。辅助照明系统100还可以包含与微控制器111进行信号通信的头盔收发器150以及车辆部分160,该车辆部分包含与头盔收发器150进行无线信号通信的车辆收发器170。
55.在本公开的另一方面中,提供了如上所述安装辅助照明系统的第二方法。该系统能够与包括车辆左信号灯和车辆右信号灯的车辆照明系统结合操作。图6是描述限定这种照明系统100的头盔照明单元的适当的左转和右转信号操作的方法的流程图。方法400包括将带有照明单元140的头盔部分支撑体114安装410在头盔20上。安装410可以完成,并且系统100的头盔部分110在由摩托车手使用的间隔期间留在头盔20上的适当位置。然而,摩托车手可能有多个头盔,并且期望将系统100的头盔部分110从一个头盔20移动到另一头盔。或者头盔部分110可能需要从头盔20移除以更换电池。系统100的头盔部分110可移除地接合到头盔20,诸如通过钩环紧固件,因此容易从头盔20移除并重新附接,或者移动到另一头盔。
56.系统100的头盔部分110在具有明显的正面朝上(图5b)取向(本文中也称为向上位置)和倒置(图5a)取向(本文中也称为向下位置)方面,区分可能不是特别明显。因此,当摩托车手将带有头盔照明单元140的头盔部分支撑体114安装在头盔上时,如果他将带有头盔照明单元140的头盔部分支撑体114倒置安装,如图5a所示,将引起问题:当摩托车左转向信号灯244l点亮时,在右部上的第一头盔信号灯144a将点亮,并且当摩托车右转向信号灯244r点亮时,在左部上的第一头盔信号灯144b将点亮。这与期望的操作相反。
57.本公开的照明系统100和方法400解决了这个问题。再次参考图6,在带有头盔照明单元140的头盔部分支撑体114安装在头盔20上后,电力被施加420到系统100的头盔部分110。作为启动协议的一部分,微控制器111发起430诊断检查。基于来自头盔加速度计117的信号,微控制器检测440头盔部分支撑体114是处于向上(正面朝上)还是向下(倒置)位置。
58.如果检测到头盔部分支撑体114处于如图5b所示的向上位置,则启动协议的该部分完成。在系统100的操作中,微控制器111在车辆左信号灯244l点亮时将使得左部上的第一头盔信号灯144a被点亮,并且在车辆右信号灯244r点亮时将使得右部上的第二头盔信号灯144b被点亮。这是期望的操作。
59.然而,如果检测到头盔部分支撑体114处于如图5a所示的向下位置,微控制器111将头盔部分支撑体114的取向重置为正面向上。这将使得当车辆左信号灯244l点亮时左部上的头盔信号灯144b被点亮,并且当车辆右信号灯244r被点亮时右部上的第二头盔信号灯144a被点亮。
60.在方法400的替代性变型中,如果微控制器111检测到440头盔部分支撑体114处于倒置位置,则微控制器111可以发出警报470,诸如顺序闪光制动灯142和/或信号灯144a和144b、和/或通过扬声器119的可听见的啁啾声。这种警报470将被称为指令480,用于摩托车手从头盔20移除带有照明单元140的头盔部分支撑体114并将其倒置并重新安装在头盔20
上,如步骤490所示。在头盔20上倒置和重新安装头盔部分110时,将由微控制器111停止灯的闪烁和/或啁啾警报。
61.因此,显而易见的是,根据本公开,已经提供了用于与车辆结合使用的辅助安全照明系统,以及用于安全照明系统的操作的方法。技术和本发明的上述描述在本发明的主题、制造和使用的本质上仅仅是示例性的,并不旨在限制本技术中或者可能提交的要求本技术的优先权的其他申请或由此产生的专利中要求保护的任何特定发明的范围、应用或使用。在审阅描述时,必须考虑以下定义和非限制性指南。
62.本公开中的标题(诸如“背景”和“发明内容”)和本文中使用的子标题仅旨在用于本技术中主题的一般组织,而不旨在限制本技术或其任何方面的公开。特别地,“背景技术”中公开的主题可以包括新技术,并且可以不构成现有技术的引述。“发明内容”中公开的主题不是该技术或其任何实施例的整个范围的穷尽或完整公开。
63.就其他参考文献可能包含本文中的背景技术中的类似信息而言,所述陈述不构成承认那些参考文献是现有技术或与本文公开的技术的可专利性有任何关联。背景技术中的任何讨论仅旨在提供认定的总体性概述。
64.该描述和具体示例虽然指示了本文公开的技术的实施例,但是仅仅是旨在用于说明,而非旨在限制该技术的范围。而且,具有所陈述的特征的多个实施例的叙述并不旨在排除具有附加特征的其他实施例,或者包含所陈述的特征的不同组合的其他实施例。出于制造和使用该技术的组合物和方法的示意性目的,提供了具体的示例,并且除非另外明确说明,否则这些示例并不旨在表示这个技术的给定实施例已经或没有被制造或测试。
65.就本文所采用的程度而言,词语“优选的”和“优选地”指的是在特定环境下提供特定益处的技术的实施例。然而,在相同或其他情况下,其他实施例也是优选的。另外,一个或多个优选实施例的引述并不意味着其他实施例没有用,并且也不旨在将其他实施例排除在技术范围之外。
66.除非另有说明,否则本公开中使用的相关术语应被解释为包括本领域技术人员将会认为提供等同功能的某些容差。作为示例,术语“垂直”不一定限于90.00
°
,也可以是本领域技术人员认为向相关构件或元件所描述的目的提供等效功能的任何变体。在配置的上下文中诸如“约”和“基本上”的术语通常涉及与相关元件的位置、布置或配置精确或足够接近的布置、位置和/或配置,以保持元件在本发明内的可操作性,同时不实质性地修改本发明。类似地,除非特别说明或从上下文中清楚,否则数值应被解释为包括本领域技术人员将认为具有可忽略的重要性的某些公差,因为这样不会实质上改变本发明的可操作性。
67.如本文所用,词语“包括”、“包含”、“含有”及其变体旨在是非限制性的,使得列表中项的引述不排除在本技术的材料、组合物、装置和方法中也可能有用的其他类似项。类似地,术语“能够”和“可以”及其变体旨在是非限制性的,使得实施例能够或可以包括某些元件或特征的叙述不排除不包含那些元件或特征的本技术的其他实施例。除非另有说明,本文公开的辅助照明系统涵盖其公开特征的所有组合,而不管是否已经明确引述了限定系统的特征的每个可能组合。
68.在已经如此描述了本公开的基本构思的情况下,对于本领域技术人员来说显而易见的是,前述详细公开仅旨在通过示例的方式呈现,而不是限制性的。尽管本文中没有明确说明,但是本领域技术人员将会想到各种改变、改进和修改。由此旨在暗示这些改变、改进
和修改,并且这些改变、改进和修改在本发明的精神和范围内。附加地,除非在权利要求中明确陈述,否则处理元件或序列的所引述的顺序,或者数字、字母或其他名称的使用因此不旨在将要求保护的过程限制为任何顺序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1