搬运车辆的制作方法
1.本发明涉及具有设置了车轮的车身的搬运车辆。
背景技术:
2.以往,在自卸卡车那样的使用车轮行驶的搬运车辆中,从安全方面及经济方面的观点出发,车轮的滑移成为课题。特别是在运用无人自卸卡车(搬运车辆)的情况下,需要避免车轮相对于路面滑移而无法对车辆进行制动,因此,降低加减速度而使车速缓缓地变化。因此,需要较长地确保制动距离、加速距离,因此,自卸卡车的行驶效率降低。
3.例如,在专利文献1中公开了一种矿山机械的运行管理系统,根据至少包含与在矿山进行作业的矿山机械行驶的行驶道路的水分量相关的信息的行驶道路信息、与行驶道路信息所对应的行驶道路的位置相关的信息即位置信息,来生成对矿山机械在与行驶道路信息对应的行驶道路上行驶时的速度限制进行变更的速度限制信息。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2013-196051号公报
技术实现要素:
7.发明要解决的课题
8.然而,在上述专利文献1中,根据行驶道路的水分量等来设定行驶道路等级,与行驶道路等级对应地变更速度限制。因此,例如存在如下问题:在目标停止位置停止时,车轮因急剧的减速而滑移,有时无法对车辆进行制动。
9.本发明是鉴于这样的问题而完成的,课题在于提供一种能够在抑制车辆的滑移的同时高效地行驶的搬运车辆。
10.用于解决课题的手段
11.为了解决上述课题,本发明的搬运车辆具有设置了车轮的车身和车辆控制装置,在行驶路径上行驶,所述车辆控制装置计算所述行驶路径上的多个位置处的所述车轮的滑移率,根据各所述滑移率,计算并存储所述多个位置处的、所述车轮相对于路面的抓地状态与滑移状态的边界的所述路面与所述车轮之间的摩擦系数值即滑移极限值,读出所述滑移极限值,计算所述多个位置处的、所述车轮相对于路面能够维持所述抓地状态的所述搬运车辆的最大加速度及最大减速度中的至少一方,在行驶至所述行驶路径上的目标位置时,与所述目标位置处的目标速度和根据所述搬运车辆在所述行驶位置行驶时的所述滑移极限值计算出的所述最大加速度及所述最大减速度中的至少一方对应地设定从本车辆至所述目标位置之间的行驶位置处的目标行驶速度。
12.此外,在本说明书及请求专利保护的范围中,抓地状态是指车轮相对于路面的滑移率为预定的阈值(一般情况下为约0.2)以下的状态,滑移状态是指滑移率比预定的阈值大的状态。在抓地状态下,车轮相对于路面具有抓地力,例如能够进行车辆的制动。另一方
面,在滑移状态下,车轮相对于路面不具有抓地力,例如不能进行车辆的制动。
13.发明效果
14.根据本发明,能够提供一种搬运车辆,其能够在抑制车辆的滑移的同时高效地行驶。
附图说明
15.图1是本发明的第一实施方式的自卸卡车的侧视图。
16.图2是表示本发明的第一实施方式的自卸卡车的结构的图。
17.图3是表示本发明的第一实施方式的自卸卡车的处理流程的图。
18.图4是表示车轮速度矢量计算流程的图。
19.图5是表示惯性速度矢量计算流程的图。
20.图6a是表示滑移率计算流程的图。
21.图6b是表示滑移极限值计算流程的图。
22.图7是表示滑移极限典型值决定流程的图。
23.图8是表示测量信息表的图。
24.图9是表示将行驶路径划分为多个测量区间的状态的图。
25.图10是表示测量区间信息表的图。
26.图11是表示测量区间表的图。
27.图12是表示某测量区间中的滑移极限值及其频度的一例的图。
28.图13是表示路面信息表的图。
29.图14是表示路面信息生成流程的图。
30.图15是用于对根据滑移极限值的时间变化来判定路面状态的变化的方法进行说明的示意图。
31.图16是表示自卸卡车的前方的路面状态的预测流程的图。
32.图17是表示滑移极限系列的图。
33.图18是表示最大加减速度计算流程的图。
34.图19是表示最大加减速度系列的图。
35.图20是表示目标行驶速度设定流程的图。
36.图21是表示目标行驶速度系列的图。
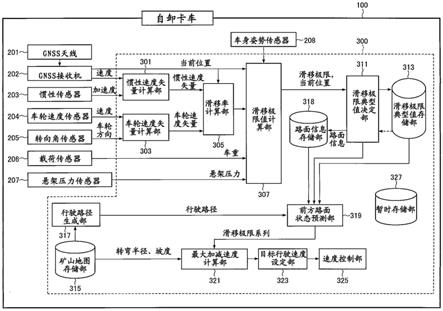
37.图22是表示具有作为本发明的第二实施方式的搬运车辆的一例的自卸卡车的速度控制系统的结构的图。
38.图23是表示本发明的第二实施方式的自卸卡车的处理流程的图。
39.图24是表示本发明的第二实施方式的管制系统的处理流程的图。
40.图25是表示本发明的第二实施方式的测量区间信息表的图。
具体实施方式
41.以下,对本发明的实施方式的搬运车辆进行说明。
42.(第一实施方式)
43.参照图1~图21,对作为本发明的第一实施方式的搬运车辆的一例的自卸卡车100
(以下,也简称为车辆)进行说明。图1是本发明的第一实施方式的自卸卡车100的侧视图。
44.图1所示的自卸卡车100是不需要驾驶员的所谓无人自卸卡车,主要在矿山使用。自卸卡车100具有:在前后方向上延伸的坚固的框架即车身101、设置于车身101的上部且装载碎石物等的货箱(货斗)102、以及车轮103(前轮103a、后轮103b)。另外,车轮103的车轮轴104经由具有弹簧等的悬架安装于车身101。此外,前轮103a能够左右转向。
45.在车身101设置有成为用于使自卸卡车100行驶的驱动源的发动机(未图示)和对自卸卡车100赋予制动力的制动器(未图示)。此外,驱动源不仅限于发动机。例如,也可以在发动机的输出轴安装电动发电机等发电机,并且将发电机的发电电力供给至行驶马达,通过行驶马达使车轮103旋转。另外,也可以从蓄电池向行驶马达供电,通过行驶马达使车轮103旋转。
46.图2是表示本发明的第一实施方式的自卸卡车100的结构的图。如图2所示,在自卸卡车100设置有:gnss(全球导航卫星系统:global navigation satellite system)天线201、gnss接收机202、惯性传感器203、车轮速度传感器204、转向角传感器205、载荷传感器206、悬架压力传感器207、车身姿势传感器208以及车辆控制装置300。
47.gnss天线201接收来自gps(全球定位系统:global positioning system)等定位卫星的电波。gnss接收机202以由gnss天线201接收到的信息为基础来计算自卸卡车100的位置、速度。惯性传感器203由测量车身101的加速度、角速度的加速度传感器、角速度传感器构成。惯性传感器203在固定于车身101的坐标系即车身坐标系b中测量包含重力加速度在内的加速度、角速度等。
48.车轮速度传感器204根据车轮103的转速测量车轮103相对于路面的行进速度。转向角传感器205测量车轮103(在此为前轮103a)的转向方向及转向角。载荷传感器206测量自卸卡车100的载货重量。悬架压力传感器207测量连接各车轮103和车身101的悬架的压力。
49.车身姿势传感器208测量由通过全局坐标系e的xe轴及ye轴伸展的水平面与车身坐标系b的xb轴及yb轴所成的倾斜角度、和从全局坐标系e的xe轴到车身坐标系b的xb轴的旋转角度表示的车身姿势。此外,全局坐标系e是指以地球上的任意的点为原点,在与重力方向垂直的平面(水平面)上设定xe轴及ye轴,在重力方向的反方向上设定ze轴的3轴正交坐标系。车身坐标系b是指以车身内的任意的点为原点,在车身前后方向上设定xb轴,在车身左右方向上设定yb轴,在车身上方向上设定zb轴的3轴正交坐标系。
50.车辆控制装置300具有:惯性速度矢量计算部301、车轮速度矢量计算部303、滑移率计算部305、滑移极限值计算部307、滑移极限典型值决定部311、滑移极限典型值存储部313、矿山地图存储部315、行驶路径生成部317、路面信息存储部318、前方路面状态预测部319、最大加减速度计算部321、目标行驶速度设定部323、速度控制部325以及暂时存储部327。
51.惯性速度矢量计算部301根据gnss接收机202及惯性传感器203的输出来计算自卸卡车100的惯性速度矢量。车轮速度矢量计算部303根据车轮速度传感器204及转向角传感器205的输出来计算自卸卡车100的车轮速度矢量。滑移率计算部305根据惯性速度矢量及车轮速度矢量来计算滑移率。
52.滑移极限值计算部307根据自卸卡车100的滑移率、加减速度及车重等来计算各位
置处的滑移极限值。滑移极限典型值决定部311根据多个滑移极限值来计算滑移极限典型值。滑移极限典型值存储部313存储滑移极限典型值。
53.在矿山地图存储部315中预先存储有矿山地图数据。矿山地图数据中包含堆积场、卸载场及连接它们的输送道路的位置信息、输送道路的各位置处的坡度及曲率半径的信息等。行驶路径生成部317根据矿山地图数据生成供自卸卡车100行驶的行驶路径数据。
54.路面信息存储部318存储后述的路面信息。前方路面状态预测部319根据路面信息及行驶路径数据来预测自卸卡车100前方的路面状态。最大加减速度计算部321根据自卸卡车100前方的路面状态(滑移极限典型值)来计算车轮103相对于路面能够维持抓地状态的最大加速度及最大减速度中的至少一方。在本实施方式中,最大加减速度计算部321计算最大加速度和最大减速度双方。此外,在以下的说明中,有时将最大加速度和最大减速度中的至少一方简称为“最大加减速度”。
55.目标行驶速度设定部323在行驶到行驶路径上的目标位置时,根据最大加减速度和目标位置处的目标速度,设定存在于本车辆(自卸卡车100)到行驶预定路径上的目标位置之间的1处以上的行驶位置处的各目标行驶速度。速度控制部325控制自卸卡车100的行驶速度,以使自卸卡车100的行驶速度为各行驶位置处的目标行驶速度。暂时存储部327存储各种数据。
56.在本实施方式中,根据路面的滑移的容易度,计算车轮103相对于路面能够维持抓地状态的自卸卡车100的最大加减速度(在此为最大加速度及最大减速度双方),以不超过该最大加减速度的方式设定各行驶位置处的目标行驶速度,由此抑制自卸卡车100的不能控制行驶的滑移(滑移状态)。在此,根据惯性速度矢量和车轮速度矢量来计算各位置处的滑移率,所述惯性速度矢量是根据行驶中的各位置处的gnss接收机202及惯性传感器203的输出值计算出的,所述车轮速度矢量是根据车轮速度传感器204及转向角传感器205的输出值计算出的。根据各位置处的滑移率、加减速度及车重等,计算各位置处的滑移极限值。此外,各位置处的滑移极限值是指车轮103相对于路面的抓地状态与滑移状态的边界的路面与车轮103之间的摩擦系数值。为了计算各位置处的滑移极限值,不需要在自卸卡车100实际行驶中从抓地状态切换为滑移状态,能够使用抓地状态下的滑移率来计算滑移极限值。由于自卸卡车100反复通过行驶路径,因此在自卸卡车100每次通过相同的位置时都更新滑移极限值。根据该滑移极限值及过去的滑移极限值来预测自卸卡车100前方的路面状态,计算自卸卡车100不会成为滑移状态(例如不能制动状态)的最大加减速度。
57.自卸卡车100以不超过最大加减速度的方式设定各位置处的目标行驶速度并行驶。对以不超过最大加减速度的方式设定各位置处的目标行驶速度的方法进行简单说明。在此,例如对使行驶中的自卸卡车100以预定的限制速度停止在目标位置的情况(目标位置处的目标速度为零的情况)进行说明。在使自卸卡车100以最大减速度减速而从限制速度变为速度零的情况下,从减速开始位置到停止位置的距离(制动距离)通过1/2
×
(最大减速度
×
制动时间2)来进行计算。此外,制动时间(从减速开始到速度零为止的时间)是限制速度除以最大减速度而得到的值。由于计算出的制动距离未考虑滑移,因此实际的制动距离以抓地状态和滑移状态的边界的滑移率(一般为0.2左右)变长。因此,在距目标位置为考虑了滑移率的制动距离近前的位置(减速开始位置)开始减速即可。因此,从自卸卡车100的当前位置到减速开始位置将限制速度设定为目标行驶速度即可。另外,在从制动开始位置到目
标位置的各位置,将从限制速度以一定的比率降低而得的速度设定为目标行驶速度即可。
58.以下,按照图3所示的流程对根据路面的滑移的容易度计算自卸卡车100的最大加减速度,以不超过该最大加减速度的方式进行行驶控制的方法进行详细说明。
59.在步骤s301中,计算车轮速度矢量。车轮速度矢量例如能够通过图4所示的流程来进行计算。在步骤s401中,车轮速度传感器204根据从动轮(前轮103a)的左右任一方的转速取得车轮速度(车轮103相对于路面的行进速度)。在步骤s402中,转向角传感器205取得从动轮(前轮103a)相对于车身前后方向的倾斜即转向角。在步骤s403中,车轮速度矢量计算部303根据车轮速度及转向角来计算车轮速度矢量。在将车轮速度设为v,将转向角设为δ时,车轮速度矢量在车身坐标系b中通过以下的公式(1)表示。
60.v
wx
=v cosδ,v
wy
=v sinδ
ꢀꢀꢀꢀꢀ
(1)
61.这样,在本实施方式中,根据作为从动轮的前轮103a的左右任一方来计算车轮速度矢量。从动轮(前轮103a)与驱动轮(后轮103b)相比转矩的施加小,因此能够高精度地检测滑移率。车轮速度矢量的计算不限于本实施方式的方法,也可以使用其他车轮103或多个车轮103来进行计算。在任一情况下,得到的效果相同。
62.在步骤s302(参照图3)中计算惯性速度矢量。惯性速度矢量能够根据从gnss接收机202输出的车身101的速度、从惯性传感器203输出的车身101的加速度来进行计算。从gnss接收机202输出的车身101的速度作为全局坐标系e中的速度方向以一定周期输出。在本实施方式中,gnss接收机202的输出周期比惯性传感器203的输出周期长,惯性传感器203的输出周期与车辆控制装置300的输出周期相同。
63.图5表示惯性速度矢量的计算流程。在步骤s501中,惯性速度矢量计算部301取得保存在暂时存储部327中的前采样时刻的速度矢量惯性速度矢量或车轮速度矢量。在步骤s502中,惯性传感器203获取加速度矢量。在步骤s503中,惯性速度矢量计算部301判断是否是gnss速度(gnss接收机202输出的速度)的取得周期。在是gnss速度的取得周期的情况下转移到步骤s504。惯性速度矢量计算部301将gnss速度矢量变换为车身坐标系b,设定为惯性速度矢量vi,转移到步骤s509。
64.在此,在将gnss速度矢量设为v,将从车身坐标系b向全局坐标系e的坐标变换矩阵设为c
eb
,将从车身姿势传感器208得到的翻滚角设为ψ,将俯仰角设为φ,将偏航角设为θ时,惯性速度矢量vi通过以下的公式(2)表示,坐标变换矩阵c
eb
通过以下的公式(3)表示
[0065][0066][0067]
另一方面,在不是gnss速度的取得周期的情况下,惯性速度矢量计算部301通过在前采样时刻的速度矢量上累计惯性传感器203输出的加速度矢量来计算当前时刻的惯性速度矢量。但是,通过加速度矢量的累计而计算出的速度矢量在累计时间(累计次数)增加时误差变大。因此,为了防止误差变得过大,仅在gnss速度的未取得时间(加速度矢量的累计时间)小于阈值的情况下,在前采样时刻的速度矢量上累计加速度矢量来计算当前时刻的惯性速度矢量。
[0068]
具体而言,在不是gnss速度的取得周期的情况下,从步骤s503转移到步骤s505,惯性速度矢量计算部301根据最后取得gnss速度的时刻与当前时刻之差,计算gnss速度的未取得时间。在步骤s506中,惯性速度矢量计算部301判断未取得时间是否小于阈值。在未取得时间为阈值以上的情况下,转移到步骤s507,将惯性速度计算标志设定为“0(不可计算)”。
[0069]
另一方面,在未取得时间小于阈值的情况下,转移到步骤s508,通过在前采样时刻的速度矢量上累计在步骤s502中取得的加速度矢量,计算当前时刻的惯性速度矢量。此外,在将加速度矢量设为α,将单位时间设为dt时,当前时刻的速度通过以下的公式(4)来进行计算。
[0070]
vi(t)=vi(t-1)+a(t)dt
ꢀꢀꢀꢀꢀꢀꢀ
(4)
[0071]
在步骤s509中,将惯性速度计算标志设定为“1(可计算)”,结束惯性速度矢量的计算处理。
[0072]
接着,在步骤s303中,判断惯性速度计算标志是否为“1(可计算)”。在惯性速度计算标志不是“1(可计算)”的情况下,转移到步骤s305。该情况下,惯性速度计算标志为“0(不可计算)”,处于惯性速度矢量的精度差的状况,因此,对当前时刻的速度矢量设定车轮速度矢量。
[0073]
另一方面,在惯性速度计算标志为“1(可计算)”的情况下,转移至步骤s304,计算车轮103相对于路面的滑移率。滑移率能够通过图6a所示的流程进行计算。
[0074]
在步骤s601中,滑移率计算部305取得在步骤s301中计算出的车轮速度矢量和在步骤s302中计算出的惯性速度矢量。在步骤s602中,滑移率计算部305根据车轮速度矢量及惯性速度矢量来计算滑移率。滑移率λ通过以下的公式(5)进行计算。
[0075][0076]
在步骤s306中,滑移极限值计算部307计算滑移极限值。在此,滑移极限值是指在利用车轮行驶的车辆中车轮从抓地状态切换为滑移状态的边界的路面与车轮103之间的摩擦系数值。在路面与车轮103之间的摩擦系数值超过滑移极限值时,车辆的行驶控制变得困难。
[0077]
该滑移极限值能够在判明了路面与车轮103之间的摩擦系数值的情况下容易地进行计算,但一般情况下,根据车辆的重量、路面状态(坡度、含水量、土质等)、车辆的加减速度而变化,因此,滑移极限值也变化。因此,在本实施方式中,如果路面状态(坡度、含水量、土质等)恒定,则使用在抓地状态下滑移率与摩擦系数值大致成比例的情况,如以下那样计算滑移极限值。
[0078]
如图6b所示,在步骤s611中,计算各车轮103施加于路面的载荷。具体而言,从载荷传感器206取得载货重量,对取得的重量加上预先设定的车重,除以车轮103的数量,由此计算施加于各车轮103的重量。此外,也可以根据悬架压力传感器207的测量结果来计算施加于各车轮103的重量。
[0079]
在步骤s612中,取得从gnss接收机202输出的位置信息。
[0080]
在步骤s613中,计算滑移极限值。将在步骤s611中计算出的重量设为m,将重力加速度设为g,将车辆速度设为v,将车辆的加减速度设为α,将空气粘性系数设为b,将滚动阻
力系数设为c。另外,将抓地状态与滑移状态的边界的滑移率设为λ。该滑移率λ一般情况下为0.2左右。滑移极限值μ
lim
在使用以下的作为运动方程式的公式(6)计算了推定摩擦系数μ之后,进一步使用以下的公式(7)进行计算。计算出的滑移极限值μ
lim
存储在暂时存储部327中。
[0081][0082][0083]
此外,在此示出了使用重量m、车辆速度v、空气粘性系数b、滚动阻力系数c来计算推定摩擦系数μ的例子,但也可以代替上述公式(6)而使用以下的公式(6)’来计算推定摩擦系数μ。但是,使用上述公式(6)能够高精度地计算滑移极限值μ
lim
。
[0084]
α=μg
ꢀꢀꢀꢀ
(6),
[0085]
在步骤s307中,滑移极限典型值决定部(以下,也称为典型值决定部)311决定滑移极限值的典型值。在步骤s306中计算出的滑移极限值是测量出的各测量位置处的瞬间的值。然而,滑移极限值使用车重、车辆的加减速度及速度等测量值来进行计算,因此产生误差。也能够直接使用该滑移极限值,如在后面进行叙述的那样计算最大加减速度(加速度的上限值和减速度的上限值)并设定目标行驶速度,但该情况下,各测量位置处的目标行驶速度为包含误差的状态。因此,目标行驶速度按测量位置发生变化,因此,需要使车辆的速度频繁地变化。
[0086]
因此,在本实施方式中,将车辆的行驶路径划分为多个测量区间,假设在各测量区间内路面与车轮103之间的摩擦系数值恒定,决定各测量区间的滑移极限典型值(以下,也称为典型值)。并且,将决定出的典型值用作各测量区间中的滑移极限值。
[0087]
图7表示滑移极限典型值的决定流程。在步骤s701中取得自卸卡车100的测量信息。在该测量信息中包含测量位置、加减速度、车重、滑移极限值。取得的测量信息作为图8所示的测量信息表存储在暂时存储部327中。
[0088]
在步骤s702中,将测量区间信息存储在暂时存储部327中。在此,测量区间是将自卸卡车100的行驶路径划分为多个区间而得到的,在滑移极限值被视为大致恒定的范围内进行划分。图9表示从堆积场到卸载场的输送路径(行驶路径)的一例,将行驶路径划分为多个区间。各测量区间的长度的决定方法没有特别限定。例如,各测量区间的长度也可以通过对预先设定于矿山地图数据的相应区间的限制速度乘以预先决定的时间来决定。另外,在事先知道滑移极限值在行驶路径上容易变化的地点的情况下,也可以在该地点划分测量区间。另外,在图9中,遍及行驶路径的整个区域进行划分,但也可以仅划分需要加减速的区域(例如,拐角周边、堆积场及卸载场的周边)。
[0089]
测量区间信息包含与上述测量区间(id)对应的滑移极限值、加速度、车重、时刻,作为图10所示的测量区间信息表存储在暂时存储部327中。
[0090]
在步骤s703中,从滑移极限典型值存储部(以下,也称为典型值存储部)313取得路面状态标志。如图11所示,在典型值存储部313中存储包含与各测量区间(id)对应的起点位置、终点位置、坡度、曲率半径、滑移极限典型值、路面状态标志的测量区间表。路面状态标志是指将维持过去的路面状态(在此为滑移极限典型值)的情况设为“正常(1)”,将路面状
态变化的情况设为“变化(0)”的标志。
[0091]
在步骤s704中,判断是否维持过去的路面状态。具体而言,判断路面状态标志为“正常(1)”的数量是否为阈值以上。
[0092]
在路面状态标志为“正常(1)”的数量比阈值少的情况下,意味着路面状态因例如降雨等而整体变化。该情况下,转移至步骤s707,将存储在典型值存储部313中的滑移极限典型值复位并返回到初始值。滑移极限典型值的初始值是使自卸卡车100以最低限度速度减速时小到不会不能控制的程度的预先决定的摩擦系数值。滑移极限典型值的初始值例如也可以使用向沙子浇水而变得容易滑移的路面与车轮103之间的摩擦系数值。
[0093]
另一方面,在路面状态标志为“正常(1)”的数量为阈值以上的情况下,意味着路面状态没有变化。该情况下转移至步骤s705,从暂时存储部327取得滑移极限值。
[0094]
在步骤s706中,使用各测量区间中的多个滑移极限值来决定(更新)滑移极限典型值。决定滑移极限典型值的方法可以考虑各种方法。例如,如图12所示,也可以制作在步骤s705中取得的某测量区间中的滑移极限值的直方图,将其峰值作为滑移极限典型值。如上所述,作为摩擦系数值的滑移极限值因测量误差等而产生偏差。因此,如图12所示,有时也为多峰性的直方图,但作为最简单的方法,将最高频度的区间的中央值设为滑移极限典型值即可。另外,也可以如图12的实线那样将频度与正态分布拟合,计算成为其峰值的摩擦系数值作为滑移极限典型值。另外,也可以计算滑移极限值的平均,作为滑移极限典型值。
[0095]
在步骤s308中,生成各测量区间中的路面信息。如图13所示,路面信息是设定有各测量区间中的滑移极限典型值及路面状态标志的表。在路面信息中,针对各测量区间包含预定数量(在此为k步)的滑移极限典型值。针对各测量区间,根据多个滑移极限典型值设定路面状态标志。路面信息例如能够通过图14所示的流程来生成。
[0096]
如图14所示,在步骤s1401中选择1个成为对象的测量区间。在步骤s1402中,计算在步骤s1401中选择出的测量区间中的滑移极限值的平均(以下,也称为平均滑移极限值)。在将平均滑移极限值设为μ
ave
,将全部测量区间中的最新的滑移极限典型值设为μ
lim
i(0),将测量区间数设为m时,平均滑移极限值μ
ave
通过以下的公式(8)进行计算。但是,观测次数m在路面状态标志变更时复位,设为0次。
[0097][0098]
接着,在步骤s1403中,根据成为对象的测量区间的滑移极限值的时间变化(滑移极限值的更新引起的变化)来判定路面状态的变化。该路面状态的变化的判定方法可以考虑各种方法,但在此表示最简单的判定方法。图15表示根据滑移极限值的时间变化来判定路面状态的变化的示意图。
[0099]
首先,通过以下的公式(9)计算过去n单位时间(其中,n<k)量的滑移极限典型值的平均(以下,也称为平均滑移极限典型值)与在步骤s1402中计算出的平均滑移极限值之差。
[0100][0101]
接着,通过以下的公式(10)计算过去n单位时间(其中,n<k)量的平均滑移极限典
型值与过去n单位时间(其中,n<n/2)量的平均滑移极限典型值之差。
[0102][0103]
在差δμn、δμn中的任一个超过阈值的情况下判断为路面状态发生变化,在未超过阈值的情况下判断为路面状态未发生变化。此外,判定路面状态的变化的方法不限于使用上述公式(9)及(10)的方法,当然能够使用其他各种方法。
[0104]
在步骤s1404中,根据步骤s1403的判定结果来更新路面状态标志。在步骤s1405中,判断是否针对全部的测量区间更新了路面状态标志。在未针对全部的测量区间更新路面状态标志的情况下,返回到步骤s1401,选择下一测量区间,反复进行步骤s1402至步骤s1405。在针对全部的测量区间更新了路面状态标志的情况下,转移至步骤s1406,将路面信息记录在路面信息存储部318中。
[0105]
在路面信息的生成处理结束时,在步骤s309中,对于当前时刻的速度矢量设定惯性速度矢量。
[0106]
在步骤s310中,预测自卸卡车100前方的路面状态(在此为滑移极限典型值)。自卸卡车100前方(行驶预定路径)的路面状态可能发生变化,因此,使用上述的路面状态标志来进行预测。
[0107]
图16表示自卸卡车100前方的路面状态的预测流程。在步骤s1601中,从gnss接收机202的输出取得自卸卡车100的当前位置。在步骤s1602中,从当前位置到目标位置取得行驶预定路径。具体而言,通过行驶路径生成部317,使用储存有矿山内的全部行驶路径数据的矿山地图数据,生成从当前位置到目标位置的行驶预定路径。在此,目标位置设为从当前位置离开在自卸卡车100以最低减速度减速时不为不能制动状态(滑移状态)而能够停止的距离的地点。作为目标位置,例如列举堆积场、卸载场或设定于矿山地图的限制速度的变化点(拐角等)。另外,以在当前位置与目标位置之间不存在限制速度的变化点的方式设定目标位置。此外,也可以以在当前位置与目标位置之间存在限制速度的变化点的方式设定目标位置。
[0108]
在步骤s1603中,将全部测量区间中的行驶预定路径所包含的测量区间设定为对象测量区间,按照远离当前位置的顺序重新排列。在步骤s1604中,从全部对象测量区间中,按照远离当前位置的顺序选择对象测量区间。在步骤s1605中,从路面信息存储部318取得(读出)在步骤s1604中选择出的对象测量区间的路面信息即滑移极限典型值、路面状态标志及平均滑移极限值。
[0109]
在步骤s1606中,判断在步骤s1604中选择出的对象测量区间的路面状态标志是否为“正常(1)”。在路面状态标志为“正常(1)”的情况下,转移至步骤s1607,对图17所示的滑移极限系列中的该对象测量区间设定平均滑移极限值。此外,滑移极限系列是指将当前位置到目标位置的对象测量区间与对各对象测量区间设定的滑移极限值关联起来所得的表。另一方面,在路面状态标志为“变化(0)”的情况下,转移至步骤s1608,对滑移极限系列中的该对象测量区间设定滑移极限典型值。即,在路面状态标志为“变化(0)”的情况下,对该对象测量区间设定在上述的步骤s707中设定的滑移极限典型值的初始值。
[0110]
在步骤s1609中,判断是否针对全部对象测量区间结束了步骤s1604到步骤s1608
的处理。在未针对全部对象测量区间结束处理的情况下,返回到步骤s1604,反复进行步骤s1604到步骤s1608的处理。在针对全部对象测量区间结束了处理的情况下,转移到步骤s1610,将滑移极限系列输出到最大加减速度计算部321。
[0111]
在步骤s311中,根据滑移极限系列来计算自卸卡车100的最大加减速度。该最大加减速度是自卸卡车100能够维持抓地状态的加速度的上限值及减速度的上限值。
[0112]
图18表示自卸卡车100的最大加减速度的计算流程。在步骤s1801中,取得在步骤s310中生成的滑移极限系列。在步骤s1802中,选择滑移极限系列中的1个对象测量区间。在步骤s1803中,从矿山地图取得选择出的对象测量区间中的转弯半径(曲率半径)及坡度。
[0113]
在步骤s1804中,计算选择出的对象测量区间中的自卸卡车100的最大加减速度。在将最大加减速度设为α
max
,将各对象测量区间中的滑移极限值设为μ
lim’,将在步骤s1803中取得的坡度、转弯半径分别设为r,将重力加速度设为g,将行驶预定路径的限制速度(在矿山地图数据中预先设定的车辆速度的上限)设为v
max
时,最大加减速度α
max
通过以下的公式(11)进行计算。
[0114][0115]
此外,也可以将在步骤s303中计算出的重量设为m,将空气粘性系数设为b,将滚动阻力系数设为c,使用以下的公式(11)’来计算最大加减速度α
max
。该情况下,能够更高精度地计算最大加减速度α
max
。
[0116][0117]
对于图19所示的最大加减速度系列中的该对象测量区间设定计算出的最大加减速度α
max
。此外,最大加减速度系列是指将当前位置到目标位置的对象测量区间与对各对象测量区间设定的最大加减速度关联起来而得的表。
[0118]
在步骤s1805中,判断是否针对全部对象测量区间计算了最大加减速度。在未针对全部对象测量区间计算最大加减速度的情况下,返回到步骤s1802,反复进行步骤s1802到步骤s1804的处理。在针对全部对象测量区间计算了最大加减速度的情况下,结束最大加减速度的计算处理。
[0119]
在步骤s312中,根据最大加减速度系列来设定各位置处的自卸卡车100的目标行驶速度。目标行驶速度是自卸卡车100用于维持抓地状态地以预定的目标速度到达目标位置的最高行驶速度。例如在卸载场(目标位置)停止的情况下,在接近卸载场的位置将目标行驶速度设定得低,在远离卸载场的位置将目标行驶速度设定得高。自卸卡车100随着接近卸载场而减速,但此时以自卸卡车100能够一边维持抓地状态一边在卸载场停止,且成为尽可能快的行驶速度的方式设定目标行驶速度。
[0120]
图20表示自卸卡车100的目标行驶速度的设定流程。在步骤s2001中,取得在步骤s311中设定的最大加减速度系列。在步骤s2002中,按照远离自卸卡车100的当前位置的顺序选择对象测量区间。在步骤s2003中,针对选择出的对象测量区间,取得对于矿山地图设定的限制速度。
[0121]
在步骤s2004中,在计算了上次选择出的对象测量区间的起点(接近自卸卡车100的位置)处的目标行驶速度的情况下,判断该目标行驶速度是否为在步骤s2003中取得的限
制速度以上。但是,目标行驶速度不会超过限制速度,因此,判断目标行驶速度是否与限制速度相等。在目标行驶速度与限制速度相等的情况下,转移至步骤s2005。然后,在步骤s2005中,对于图21所示的目标行驶速度系列中的该对象测量区间,将目标行驶速度设定为限制速度。此外,目标行驶速度系列是指将当前位置到目标位置的对象测量区间与对各对象测量区间设定的目标行驶速度关联起来而得的表。
[0122]
另一方面,在目标行驶速度比限制速度低的情况下,转移至步骤s2006。并且,根据对象测量区间的终点(上次选择出的对象测量区间的起点)处的目标行驶速度、及对象测量区间的最大加减速度,计算该对象测量区间的起点处的目标行驶速度并设定于目标行驶速度系列,以使自卸卡车100能够维持可制动状态(抓地状态)地以目标行驶速度到达对象测量区间的终点。此外,除了该对象测量区间的起点,还可以设定各位置处的目标行驶速度。
[0123]
在步骤s2007中,判断是否针对全部对象测量区间设定了目标行驶速度。在未针对全部对象测量区间设定目标行驶速度的情况下,返回到步骤s2002,反复进行步骤s2002至步骤s2006的处理。在针对全部对象测量区间设定了目标行驶速度的情况下,结束目标行驶速度的设定处理。
[0124]
在步骤s313中,通过速度控制部325控制自卸卡车100的速度。此时,将在步骤s312中生成的目标行驶速度系列的目标行驶速度作为目标值来进行车轮103的转速控制、制动控制。
[0125]
在本实施方式中,如上所述,车辆控制装置300计算并存储行驶路径上的多个位置处的滑移极限值,读出滑移极限值,计算车轮103相对于路面能够维持抓地状态的最大加减速度(在此为最大加速度及最大减速度双方),在行驶到行驶路径上的目标位置时,与目标位置处的目标速度和根据自卸卡车100在行驶位置行驶时的滑移极限值计算出的最大加减速度对应地设定本车辆到目标位置之间的行驶位置处的目标行驶速度。由此,以自卸卡车100以最大加速度进行加速及以最大减速度进行减速的方式,设定到行驶预定路径上的目标位置为止的各行驶位置处的目标行驶速度。因此,自卸卡车100维持着不超过最大加速度及最大减速度的状态(抓地状态)以最短时间以预定的目标速度到达目标位置。由此,自卸卡车100能够一边抑制因滑移而无法控制的情况,一边高效地行驶。结果,自卸卡车100能够实现兼顾安全性及效率性的行驶。
[0126]
另外,如上所述,车辆控制装置300计算多个位置处的车轮103的滑移率,根据滑移率计算多个位置处的滑移极限值。由此,能够容易地计算车轮103相对于路面能够维持抓地状态的最大加减速度。
[0127]
另外,如上所述,车辆控制装置300根据滑移极限值的时间变化来检测路面的易滑性的变化,与路面的易滑性的变化对应地使最大加减速度变化。例如,在有降雨使得路面变得易滑的情况下,将最大加减速度变更得低,在随着气温上升、干燥等使得路面变得难以打滑的情况下,将最大加减速度变更得高。由此,能够使最大加减速度及目标行驶速度随着时间经过而适当地变化,因此,能够实现更安全且更高效的行驶。
[0128]
另外,如上所述,使用作为从动轮的前轮103a来计算滑移率。从动轮(前轮103a)与驱动轮(后轮103b)相比转矩的施加小,即使对于越野等易滑的路面,与驱动轮(后轮103b)相比也难以发生滑移,因此,能够高精度地计算滑移率。
[0129]
另外,如上所述,车辆控制装置300将行驶路径划分为多个区间,在各区间中,根据
多个滑移极限值来计算1个最大加减速度(1个最大加速度及1个最大减速度)。在本实施方式中,以滑移极限值视为大致恒定的范围划分测量区间,在各测量区间中根据多个滑移极限值来计算1个成为代表的滑移极限典型值,对各测量区间设定1个最大加减速度。由此,与对各滑移极限值1个1个地计算最大加减速度的情况相比,能够容易地计算最大加减速度。
[0130]
另外,滑移极限值使用车重、车辆的加减速度及速度等测量值来进行计算,因此产生误差。与本实施方式不同,也能够直接使用该滑移极限值,计算最大加减速度来设定目标行驶速度,但该情况下,成为各测量位置处的目标行驶速度包含误差的状态。因此,目标行驶速度按测量位置发生变化,因此,需要使车辆的速度频繁地变化。另一方面,在本实施方式中,在各测量区间中,从多个滑移极限值中使用成为代表的滑移极限典型值,计算最大加减速度来设定目标行驶速度,因此不需要使车辆的速度频繁地变化。
[0131]
另外,如上所述,车辆控制装置300在设定本车辆到目标位置之间的多个行驶位置处的目标行驶速度的情况下,从远离当前位置的(接近目标位置的)行驶位置起依次设定目标行驶速度。由此,从接近目标位置的一侧起依次设定目标行驶速度,因此,能够容易地设定各行驶位置处的目标行驶速度,以便维持着抓地状态以最短时间到达目标位置。
[0132]
(第二实施方式)
[0133]
接着,参照图22~图25对具有作为本发明的第二实施方式的搬运车辆的一例的自卸卡车100的速度控制系统900进行说明。在检测行驶路径的路面状态的情况下,利用多台自卸卡车100进行检测更有效。因此,在第二实施方式中,与上述第一实施方式不同,对利用多台自卸卡车100进行路面状态的检测,并且将通过各自卸卡车100计算出的滑移极限值发送给管制系统500,由管制系统500生成路面信息的情况进行说明。此外,在本实施方式中,对与上述第一实施方式一样的结构标注相同的符号,省略其详细说明。
[0134]
图22是表示具有作为本发明的第二实施方式的搬运车辆的一例的自卸卡车100的速度控制系统900的结构的图。速度控制系统900具有多台自卸卡车100和在与各自卸卡车100之间能够通信的管制系统500。
[0135]
在本实施方式中,与上述第一实施方式不同,代替自卸卡车100的滑移极限典型值决定部311、滑移极限典型值存储部313及暂时存储部327,在管制系统500中设置有滑移极限典型值决定部501、滑移极限典型值存储部502及暂时存储部503。此外,滑移极限典型值决定部501、滑移极限典型值存储部502及暂时存储部503分别具有与滑移极限典型值决定部311、滑移极限典型值存储部313及暂时存储部327一样的功能。
[0136]
自卸卡车100具有通信装置210,管制系统500具有在与通信装置210之间能够通信的通信装置510。此外,多个自卸卡车100全部是相同的结构,在图22中针对第二台以后的自卸卡车100省略结构。
[0137]
以下,按照图23所示的流程,对本实施方式中的自卸卡车100根据路面的滑移的容易度来计算最大加减速度,以不超过该最大加减速度的方式进行速度控制的方法进行说明。此外,针对与图3一样的处理,标注图3的符号。
[0138]
步骤s301到步骤s306的处理与上述第一实施方式一样,因此省略说明。此外,滑移极限值、加减速度、车重、当前位置等数据例如存储在路面信息存储部318中,但也可以另外设置用于存储这些数据的暂时存储部。在步骤s306的处理结束时,转移到步骤s2101。
[0139]
在步骤s2101中,向管制系统500发送测量信息。在测量信息中包含自卸卡车100的
位置、加减速度、车重、滑移极限值等。在测量信息的发送结束时,在步骤s2102中,从管制系统500接收路面信息。在步骤s2103中,将接收到的路面信息存储在路面信息存储部318中。接下来的步骤s309至步骤s313的处理与上述第一实施方式一样,因此省略说明。
[0140]
在本实施方式中,由管制系统500执行在上述第一实施方式中由自卸卡车100执行的步骤s307及s308的处理。图24表示管制系统500执行的处理流程。
[0141]
在步骤s2401中,以预先设定的周期从各自卸卡车100取得测量信息。取得的测量信息作为测量信息表(参照图8)按自卸卡车100存储在暂时存储部503中。
[0142]
在步骤s2402中,将图25所示的测量区间信息存储在暂时存储部503中。测量区间信息是针对各自卸卡车100全部收集了在上述第一实施方式的步骤s702中存储的信息的信息。
[0143]
在步骤s2403中,从滑移极限典型值存储部(以下,也称为典型值存储部)502取得路面状态标志。在典型值存储部502中,与上述第一实施方式的典型值存储部313一样,存储有包含与各测量区间(id)对应的起点位置、终点位置、坡度、转弯半径、滑移极限典型值、路面状态标志的测量区间表。
[0144]
在步骤s2404中,取得降雨洒水信息。管制系统500构成为能够获取是否通过洒水车等对路面洒水的洒水信息、与降雨的量及位置相关的降雨信息。
[0145]
在步骤s2405中,针对洒水车洒水的路径、有预定量以上的降雨的路径,将路面状态标志设定为“变化(0)”。步骤s704~s707的处理与上述第一实施方式一样。
[0146]
在步骤s706或s707的处理结束时,在步骤s2406中,生成各测量区间中的路面信息,发送给各自卸卡车100。
[0147]
在本实施方式中,如上所述,车辆控制装置300根据由多个自卸卡车100得到的多个位置处的滑移极限值来计算最大加减速度。这样,通过使用多个自卸卡车100来检测多个位置处的滑移极限值,能够在短时间内高效地生成行驶路径的路面信息。
[0148]
第二实施方式的其他效果与上述第一实施方式一样。
[0149]
此外,本发明不限于上述的实施方式,包含各种变形方式。例如,上述的实施方式是为了容易理解地说明本发明而详细说明的实施方式,不限于必须具有所说明的全部结构。另外,能够将某实施方式的结构的一部分置换为其他实施方式的结构,另外,也能够在某实施方式的结构中添加其他实施方式的结构。另外,对于各实施方式的结构的一部分,能够进行其他结构的追加、删除、置换。
[0150]
例如,在上述实施方式中,作为搬运车辆,列举自卸卡车100为例进行了说明,但本发明不限于此,例如也能够将本发明应用于轮式装载机等。
[0151]
另外,在上述实施方式中,作为搬运车辆,列举无人自卸卡车为例进行了说明,但本发明不限于此,也能够将本发明应用于需要驾驶员的搬运车辆。
[0152]
另外,在上述实施方式中,示出了计算车轮103相对于路面能够维持抓地状态的最大加速度及最大减速度双方的例子,但本发明不限于此。例如,在如自卸卡车100那样车重非常重的情况下,在减速时容易成为滑移状态(不能制动状态),在加速时难以成为滑移状态。该情况下,即使加速至自卸卡车100的加速性能的上限也难以成为滑移状态,因此也可以不计算最大加速度而仅计算最大减速度,来设定各行驶位置处的目标行驶速度。
[0153]
另外,在上述第二实施方式中,示出了由各自卸卡车100进行滑移率及滑移极限值
的计算、及最大加减速度的计算等的例子,但本发明不限于此。例如,也可以将滑移率及滑移极限值及最大加减速度等的计算所需的数据从各自卸卡车100发送至管制系统500,由管制系统500进行针对全部自卸卡车100的滑移率及滑移极限值及最大加减速度等的计算。
[0154]
另外,在上述第二实施方式中,示出了多个自卸卡车100全部为相同结构的例子,但本发明不限于此。例如,也可以构成为仅一部分自卸卡车100计算滑移率、滑移极限值。并且,剩余的自卸卡车100也可以根据来自管制系统500的路面信息等来控制速度。该情况下,不需要对全部自卸卡车100设置用于计算滑移率、滑移极限值的传感器等。
[0155]
另外,在上述实施方式中,示出了按滑移率计算滑移极限值的例子,但本发明不限于此。例如,在同一测量区间计算了多个滑移率的情况下,也可以使用滑移率的平均及加减速度的平均等来计算滑移极限值。
[0156]
符号说明
[0157]
100 自卸卡车(搬运车辆)、
[0158]
101 车身、
[0159]
103 车轮、
[0160]
103a 前轮(从动轮)、
[0161]
103b 后轮(驱动轮)、
[0162]
210 通信装置、
[0163]
300 车辆控制装置、
[0164]
500 管制系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1