清洁单元、刮刀单元、光学传感装置和清洁方法与流程
1.本发明涉及一种用于清洁机动车辆的光学传感装置的传感器窗玻璃的方法。优选地,该方法可以用于清洁用于光学距离测量的光学传感装置(更优选为光探测和测距传感器装置)的传感器窗玻璃。
背景技术:
2.用于手动操作以及用于基本上自主驾驶的机动车辆通常配备有各种光学传感装置,这些光学传感装置例如可以用于光学距离测量。例如,通过估计车辆与车辆环境中的物体之间的距离,可以生成车辆环境的映射。所采用的特定类型的光学传感器技术被称为lidar或lidar或lidar(“光探测和测距”或“激光成像探测和测距”),也称为ladar(“激光探测和测距”)或3d激光扫描。
3.通常,光学传感装置(例如光学距离测量装置,特别是光探测和测距(lidar)传感装置)可以包括一个或多个光源(优选为一个或多个激光源),用于将一个或多个光束(优选为一个或多个激光源)发射到环境中。光学传感装置还可以包括一个或多个光学探测器,用于探测被发射的一个或多个光束的反射,并且光学传感装置还可以包括处理单元,例如用于基于发射数据和与探测到的光的反射有关的数据生成环境的映射。此外,光学传感器装置通常包括形成光学传感器装置的外表面的传感器窗玻璃。然后,传感器窗玻璃可以形成光学透明的保护层,用于保护下面的传感器部件,例如一个或多个光源和/或光学探测器。因此,光可以通过传感器窗玻璃透射和探测,并且为了获得对环境的基本无阻碍的观察,光学传感装置通常布置在车辆的外部,其中传感器窗玻璃优选地在基本上向前方向上面向环境并且背离车辆。
4.在车辆的外部,传感装置(特别是传感器窗玻璃)易受聚集障碍物的影响,所述障碍物例如是雨滴、微粒、虫子等,其可能阻碍、偏转或以其他方式干扰穿过传感器窗玻璃的光信号,并且其可能导致错误的传感器数据。
技术实现要素:
5.本发明的目的可以在于提供一种用于至少减少机动车辆的已知传感装置的至少一个缺点(特别是至少减少上述缺点中的至少一个缺点)的装置和/或方法。特别地,可以优选地改善机动车辆的光学传感器装置的传感器数据。更特别地,可以优选使光学传感装置的传感器窗玻璃上的光学障碍物(例如雨滴、微粒、虫子等)的积聚最小化。
6.根据本发明的第一方面,提供了一种用于清洁机动车辆的光学传感装置(优选为用于光学距离测量,更优选是光探测和测距传感器装置)的传感器窗玻璃的方法,该方法包括以下步骤:由擦拭器叶片擦拭传感器窗玻璃的至少一部分;以及沿着擦拭器叶片的侧面(优选地在朝向擦拭器叶片的末梢的方向上)刮擦。
7.通过使擦拭器叶片在传感器窗玻璃上面擦拭,可以从传感器窗玻璃移除可能阻碍光学传感装置的视野的水滴和/或其他障碍物,这例如可以导致改善的传感器数据和/或改
善的精度。通过沿着擦拭器的侧面(优选地在朝向擦拭器叶片的末梢的方向上)刮擦,可将从传感器窗玻璃移除并由擦拭器叶片带走的障碍物从擦拭器叶片移除,这例如可阻止擦拭器叶片在其再次扫过传感器窗玻璃时可能无意地沉积这样的障碍物。因此,刮刀可提高擦拭器叶片的使用效率。
8.在一实施方式中,该方法还可包括以下步骤:在再次使擦拭器叶片在传感器窗玻璃的至少一部分上面擦拭之前,使擦拭器叶片的末梢扫过擦除表面,以便将液体和/或其他障碍物从擦拭器叶片擦除并擦拭到擦除表面上。结果,可能存在于擦拭器叶片末梢处或附近(特别是在擦拭器叶片的底部平面上或底部平面处)的液体和/或其他障碍物(如果有的话)可从擦拭器叶片扫除到擦除表面上。优选地,在擦拭器叶片的末梢扫过擦除表面的步骤期间,擦拭器叶片可相对于擦除表面处于第一位置(特别是第一角度位置),该第一位置可基本上对应于在所述擦拭器叶片在传感器窗玻璃上面擦拭时擦拭器叶片相对于传感器窗玻璃的第二位置(特别是第二角度位置)。因此,可促进存在于擦拭器叶片末梢处或附近的液体和/或其他障碍物可沉积(特别是展开)到擦除表面上。优选地,可以允许沉积液体沿擦除表面向下流动和/或可以借助于毛细作用(例如借助于排出狭缝,排出狭缝布置成用于通过毛细作用使水通过所述狭缝)至少部分地移除。
9.在另一实施方式中,该方法还可包括另一步骤:沿着擦拭器的所述侧面(特别是在朝向擦拭器叶片的末梢的方向上)刮擦额外的时间,该另一步骤优选为另一刮刀的方式。可以在再次使擦拭器叶片在传感器窗玻璃的至少一部分上面擦拭之前,并且优选地在使擦拭器叶片的末梢扫过擦除表面的上述可选的步骤之后,执行沿着擦拭器叶片的侧面刮擦额外的时间的所述另一步骤。在沿着擦拭器的所述侧面刮擦额外的时间的另一步骤中,可以至少部分地从擦拭器叶片刮除最后剩余的障碍物(例如,液体和/或污物),以便于擦拭器叶片在其再次在传感器窗玻璃上面擦拭之前可以变得相对清洁。
10.在本发明的第二方面中,提供了一种用于清洁机动车辆的光学传感装置(优选为用于光学距离测量,更优选为光探测和测距传感器装置)的传感器窗玻璃的清洁单元。优选地,所述清洁单元可以布置成用于至少部分地执行上述方法。清洁单元包括擦拭器叶片和用于从所述擦拭器叶片刮除障碍物的至少第一刮刀。清洁单元布置成用于使擦拭器叶片在传感器窗玻璃上面擦拭,且所述清洁单元进一步布置成用于使由擦拭器叶片和第一刮刀组成的组中的至少一个相对于彼此且沿着彼此运动,用于通过所述第一刮刀将障碍物刮离擦拭器叶片。
11.通过将清洁单元布置成使得其可以从擦拭器叶片刮除诸如污物和/或液体的光学障碍物,可以促进擦拭器叶片在其再次在传感器窗玻璃上面擦拭时相对清洁,由此促进传感器窗玻璃的相对有效和/或高效的清洁和/或改进传感器使用和/或精度和/或传感器数据。
12.有利地,第一刮刀可以相对于传感器窗玻璃的位置固定,并且清洁单元可以布置成用于使擦拭器叶片相对于第一刮刀运动,以沿着刮刀刮擦擦拭器叶片。因此,清洁单元可以例如包括一个或多个驱动单元,所述驱动单元既用于使擦拭器叶片在传感器窗玻璃上面擦拭,又用于使擦拭器叶片沿着第一刮刀运动。清洁单元可以具有相对简单的设计,例如便利的是,在固定的刮刀的情况下可以省略用于驱动刮刀的驱动单元。
13.在实施方式中,清洁单元可包括擦除表面,优选地,擦除表面位于第一刮刀的下
游,且清洁单元可经布置以允许擦拭器叶片末梢扫过所述擦除表面。所述擦除表面可便于通过使擦拭器叶片扫过所述擦除表面而可将液体和/或污物从擦拭器叶片擦除到所述擦除表面上。有利地,擦除表面定位成基本上平行于传感器窗玻璃的外表面,更优选为基本上与传感器窗玻璃的所述外表面成一直线。这可以便于例如当擦拭器叶片基本上保持在特定状态或位置(特别是特定旋转状态或旋转位置),并且首先沿着传感器窗玻璃,然后在第一刮刀上面并随后沿着擦除表面而基本上线性地运动时,擦拭器叶片可以相对于传感器窗玻璃处于与相对于擦除表面处于的基本上相同的位置,由此例如促进在擦拭器叶片再次扫过传感器窗玻璃之前,在这样的位置中可能沉积在传感器窗玻璃上的液体和/或污物可能已经沉积到擦除表面。
14.在实施方式中,擦除表面可由第二刮刀形成,且所述第二刮刀可包括第二刮刀边缘,所述第二刮刀边缘优选地位于擦除表面的近端处,使得擦拭器叶片可在其扫过擦除表面之前被至少部分地刮擦两次。
15.替代地或附加地,在实施方式中,清洁单元可包括另一刮刀,特别是第三刮刀,其可便于在所述擦拭器已扫过擦除表面之后将仍保留在擦拭器叶片上的任何污染物至少部分地从所述擦拭器叶片移除。
16.至少在优选实施方式中,擦拭器叶片可由相对于窗玻璃的材料相对柔性和/或相对弹性的材料制成。附加地或替代地,擦拭器叶片可由相对于第一刮刀的材料和/或相对于擦除表面的材料和/或相对于第二刮刀的材料和/或相对于另一刮刀的材料相对柔性和/或相对弹性的材料制成。例如,擦拭器叶片可由橡胶或橡胶基材料制成。传感器窗玻璃例如可以包括透光材料,其基本上是平滑的和/或均质的,以避免局部的折射率变化。传感器窗玻璃例如可以基本上是平坦的,或者替代地弯曲成所需的形状,例如具有所需的曲率半径以优化光学传感装置的视角。擦拭器叶片的形状,特别是擦拭器叶片的末梢的形状,可布置成对应于传感器窗玻璃的形状,用于传感器窗玻璃的最佳清洁。
17.在本发明的另一方面中,提供了一种用于清洁单元的刮刀单元,其中刮刀单元包括至少第一刮刀,第一刮刀限定用于将障碍物从清洁单元的擦拭器叶片刮除的第一刮刀边缘,优选地其中刮刀单元还包括擦除表面,更优选地其中擦除表面与第一刮刀边缘间隔开,还更优选地擦除表面与第一刮刀间隔开。
18.在本发明的另一方面中,提供了一种光学传感装置,特别是光探测和测距传感器装置。
19.在所附权利要求中描述了根据本发明的有利实施方式。
附图说明
20.仅通过非限制性实例的方式,现在将参考附图描述本发明的实施方式,在附图中:
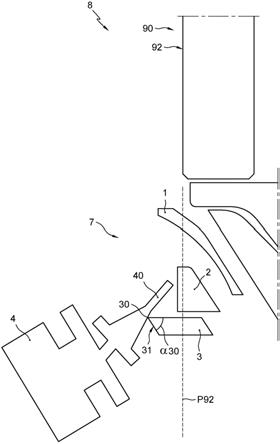
21.图1示出了根据本发明的一方面的用于清洁单元的刮刀单元的实施方式的示意性透视图,清洁单元用于清洁光学传感装置的传感器窗玻璃;以及
22.图2a-2f示出了根据本发明的一方面的用于清洁光学传感装置的传感器窗玻璃的清洁单元的实施方式在其不同状态下的示意性局部剖开的截面图。
23.应注意,附图仅示出了根据本发明的优选实施方式。在附图中,相同或相似的附图标记或数字表示相同或相应的部件。
具体实施方式
24.图1示出了在清洁单元8中使用的刮刀单元7的实施方式的示意性透视图,其中清洁单元8布置成用于清洁光学传感装置90的传感器窗玻璃91。图2a-2f示出了处于所述清洁单元8的六个不同状态下的清洁单元的示意性局部剖开的截面图。清洁单元8用于清洁汽车或另外的机动车辆的光学传感装置90的传感器窗玻璃91,特别是用于清洁传感器窗玻璃91的外表面92。光学传感装置90可以优选地用于光学距离测量,更优选地,其可以是光探测和测距传感器装置。
25.清洁单元8包括擦拭器叶片40,擦拭器叶片40优选地由弹性和/或橡胶或类似橡胶的材料制成。清洁单元8布置成用于使擦拭器叶片40(优选为至少擦拭器叶片40的末梢41)在传感器窗玻璃91上面擦拭,并且清洁单元8和/或擦拭器叶片40可布置成用于例如在平行于传感器窗玻璃91的外表面92的擦拭方向d1上将水、诸如清洁流体或降水6的其他流体、和/或对于透光的其他障碍物6推离传感器窗玻璃91的至少一部分。
26.清洁单元8还包括用于将障碍物6刮离擦拭器叶片40的第一刮刀1。此外,清洁单元8布置成用于使擦拭器叶片40和第一刮刀1中的至少一个相对于彼此且沿着彼此运动,以将障碍物6刮离擦拭器叶片40。第一刮刀1可以是用于至少部分地清洁擦拭器叶片40的刮擦系统或清洁系统的一部分。特别地,第一刮刀1可以是刮刀单元7的一部分,刮刀单元7可以形成为包括彼此互连的多个部件1、2、3(例如,通过将多个部件1、2、3安装在框架70中)的组件。然而,本领域技术人员将理解的是,替代地,刮刀单元7可以一体地形成,例如通过一体注射模制所述刮刀单元7。
27.如在此示出的实施方式中的情况,至少第一刮刀1,并且优选为整个刮擦系统7,可以相对于传感器窗玻璃91的位置固定,并且其中清洁单元8在这样的实施方式中可以布置成用于使擦拭器叶片40相对于第一刮刀1运动,以沿着刮刀刮擦擦拭器叶片40,并且优选地还用于使擦拭器叶片40相对于刮擦系统7的一个或多个可选的另外的清洁元件2、3(例如,擦除表面22和/或另一刮刀3)运动,这将在下面更详细地讨论。
28.附加地或替代地,在有利的实施方式中,清洁单元8可布置成用于使擦拭器叶片40在传感器窗玻璃91上面从第一位置(特别是顶部位置)朝向第二位置(特别是下部位置)擦拭,以擦拭传感器窗玻璃91的位于所述第一位置和所述第二位置之间的至少第一部分,并且其中清洁单元8布置成用于使擦拭器叶片40从所述第二位置基本上朝向所述第一位置向回运动,而不在传感器窗玻璃91的所述第一部分上面擦拭。如在此示出的示例性实施方式中的情况,传感器窗玻璃91的外表面92可以向上延伸,优选为基本上竖向地延伸,并且擦拭器叶片40可以擦拭所述外表面92的至少一部分(优选地通过在向下方向d1上擦拭)。擦拭器叶片40在传感器窗玻璃91上面擦拭可向下推动障碍物6,这会是有益的,例如因为其不必克服重力工作。
29.例如,在使擦拭器叶片40运动回到第一位置之前,擦拭器叶片40可在方向d4上运动离开,方向d4基本上横向于且远离传感器窗玻璃91的外表面92。替代地或附加地,通过在旋转方向r4上旋转擦拭器叶片40(例如,围绕包括所述擦拭器叶片40的擦拭器4的旋转轴线a4)可使擦拭器叶片40运动远离传感器窗玻璃91的外表面92延伸所在的虚拟平面p92。
30.已经发现,单向擦拭(特别是从第一位置到第二位置擦拭,且同时避免从第二位置基本上朝向第一位置擦拭)可以给出相对良好的清洁结果,特别是与双向擦拭相比。避免在
擦拭器叶片40从第二位置基本上朝向第一位置的返回运动中擦拭可阻止在返回运动期间流体膜展开到传感器窗玻璃91上。因此,擦拭器叶片40可在从第一位置到第二位置擦拭的同时与传感器窗玻璃91接触,而擦拭器叶片40可在擦拭器叶片40从第二位置基本上朝向第一位置运动期间与传感器窗玻璃91脱离接合。
31.在实施方式中,擦拭器4和/或擦拭器叶片40可基本上保持在特定状态或位置,特别是特定旋转状态或旋转位置,且可基本上线性地运动,特别是首先沿着传感器窗玻璃91在擦拭方向d1上运动,例如如图2a所示,且随后在第一刮刀1上面运动,例如如图2b所示。优选地,第一刮刀1可以突出于传感器窗玻璃91的外表面92延伸所在的虚拟平面p92,如例如在图2b中可见。应当理解,突出可以被认为是指在所述虚拟平面p92的与传感器窗玻璃91所位于的一侧相对的一侧处突出。即,在图2b中,传感器窗玻璃91位于所述虚拟平面p92的右侧,第一刮刀1突出到虚拟平面p92的左侧,其可以对应于设有清洁单元8的汽车或其他机动车辆的前侧。
32.第一刮刀1可限定第一刮刀边缘10,且清洁单元8可经布置以允许所述第一刮刀边缘10在与所述擦拭器叶片40的末梢41间隔开的位置处接合擦拭器叶片40的侧面44,如图2b中可见。随后,当擦拭器叶片40进一步运动时,特别是在与擦拭器叶片40在擦拭传感器窗玻璃91期间运动的方向d1基本上成一直线的方向d2上进一步运动时,第一刮刀1(特别是其第一刮刀边缘10)可沿着擦拭器叶片的所述侧面44朝向擦拭器叶片40的所述末梢41刮擦,特别是以刮除障碍物6、61(例如,虫子部分),然后障碍物6、61可被移除,特别是例如通过第一出口通道51等向下引导。
33.优选地,第一刮刀1可以具有相对尖锐的边缘10,优选地使得其角度小于120
°
,优选为约90
°
(如在此示出的实施方式中的情况),或小于90
°
。
34.有利地,清洁单元8可进一步包括擦除表面22,且清洁单元8可接着经布置以允许擦拭器叶片末梢41扫过所述擦除表面22,例如可从图2d理解的那样。通过扫过所述擦除表面22,特别是当在擦拭器叶片40再次在传感器窗玻璃91的至少一部分上面擦拭之前进行时,可将液体和/或其他障碍物从擦拭器叶片40上擦除并擦到擦除表面22上。因此,可能存在于擦拭器叶片末梢41处或附近、特别是在擦拭器叶片40的底部平面42上或底部平面42处(在擦拭器叶片40具有这样的底部平面的情况下)的液体62和/或其他障碍物可从擦拭器叶片40扫除到擦除表面22上。
35.优选地,擦除表面22可位于第一刮刀的下游。换句话说,第一刮刀边缘10可以位于传感器窗玻璃91和擦除表面22之间。
36.附加地或替代地,擦除表面22可以定位成基本上平行于传感器窗玻璃91,特别是基本上平行于传感器窗玻璃91的外表面92。优选地,擦除表面22可以与传感器窗玻璃91的外表面92基本上成一直线,如图2a-2f中可见,并且可以例如与其偏置小于5mm、优选为小于3mm、更优选为小于1mm。
37.第一刮刀1可优选地突出于擦除表面22延伸所在的虚拟平面p22,特别是在向外方向d3上突出于擦除表面22延伸所在的虚拟平面p22,向外方向d3可被认为是横向于擦除表面22和/或所述擦除表面22延伸所在的虚拟平面p22的方向d3。
38.有利地,擦除表面22可与第一刮刀边缘10间隔开,且优选地与第一刮刀1间隔开,例如在向下方向上和/或在擦拭器叶片40运动的方向d2上与第一刮刀1间隔开,特别地以形
成出口通道52,例如第二出口通道52,用于移除从擦拭器叶片40移除的障碍物。例如,由第一刮刀边缘10刮除的水滴63或其他障碍物可沿着第一刮刀1的底侧11流动通过所述第二出口通道52,而其他障碍物61(例如,相对大和/或实体部分61)可经由第一出口通道51移除,例如在图2c中可见。
39.在实施方式中,擦除表面22可由第二刮刀2形成。于是所述第二刮刀2可以包括第二刮刀边缘20,第二刮刀边缘20优选地位于擦除表面22的近端处,在这里示出的实施方式中,该近端位于所述擦除表面22的顶侧。优选地,第二刮刀2可具有相对尖锐的边缘20,优选地使得其角度小于120
°
,优选为约90
°
(如在此所示实施方式中的情况),或小于90
°
。如可从图2c理解的,第二刮刀边缘20可沿着擦拭器叶片40的侧面44刮擦,优选地在朝向擦拭器叶片40的末梢41的方向上刮擦,优选地基本上在所述末梢41扫过擦除表面22之前刮擦,在擦除表面22处,所述末梢41例如可沉积液体膜和/或其他障碍物。为了允许擦拭器叶片40相对良好地沉积这种液体,特别是通过将其展开在所述擦除表面22上面,擦除表面22(并且优选地还有擦拭器叶片44在其上面实际擦拭的擦除表面22的部分)可具有长度l22,可在擦拭器叶片40在所述擦除表面22上面擦拭的方向d2上测量该长度l22,其中在这里示出的示例性实施方式中形成为所述擦除表面22的高度的所述长度l22可为至少1mm,优选为至少2mm,更优选为至少3mm,诸如至少大约5mm。替代地或附加地,所述长度l22可至少等于且优选为大于擦拭器叶片40的末梢41的厚度t41和/或擦拭器叶片40的底部平面42的厚度t42,优选为至少大两倍,更优选为至少大三倍。
40.所述障碍物(特别是液体障碍物)可以沿着擦除表面22向下流动,并且可以优选地通过相应的出口通道53(特别是第三出口通道53)来移除,特别是排出。有利地,所述出口通道53可邻近擦除表面22的下游端定位,其中下游被认为是在擦拭器叶片运动的方向d2上的下游,所述下游端优选为擦除表面22的下端。此外,所述出口通道53可形成排出狭缝53,排出狭缝53可设置成用于通过毛细作用使水通过所述狭缝,如本领域技术人员所了解并理解的。特别地,排出狭缝可以将液体从位于擦除表面22的下游端附近的排出狭缝53的入口开口531且朝向排出狭缝的与入口开口531相对定位的出口开口532排出。优选地,限定毛细作用排出狭缝53的壁表面可以是相对平滑的,可以基本上彼此平行地延伸。附加地或替代地,所述壁表面可以相对于彼此偏置优选为小于2mm的距离,例如在0.1mm与1mm之间的距离,如在0.25mm与0.5mm之间的距离。尽管液体可以优选地通过由所述排出狭缝53提供的毛细作用排出,但是在实施方式中,替代地或附加地,可以提供主动抽吸装置。这种抽吸装置可以设置用于第三出口通道53,但是可以附加地或替代地设置用于出口通道51、52中的一个或多个其它出口通道。
41.尽管擦除表面22可由形成为第二刮刀2的元件形成,所述第二刮刀2在擦除表面22的近端处限定第二刮刀边缘20,但这不是必需的。例如,在擦除表面22的近端(特别是上端)处,其可以朝一方向弯曲,例如通过结合到限定所述擦除表面22的元件2的另一表面(特别是顶表面)中。实际上,虽然间隙和/或出口通道51可存在于第一刮刀1与限定第二刮刀边缘20的元件之间,但这也不是必需的。例如,擦除表面22可由第一刮刀1形成,且图2a的实施方式中所示的擦除表面22可在此替代实施方式中例如一直延伸到第一刮刀1的底侧11。
42.有利地,清洁单元8可包括另一刮刀3,特别是第三刮刀3。优选地,所述另一刮刀3可以突出于擦除表面22延伸所在的虚拟平面p22和/或超过传感器窗玻璃91的外表面92延
伸所在的虚拟平面p92。所述另一刮刀3(特别是其刮擦边缘30)可以便于将在所述擦拭器叶片40已经扫过擦除表面22之后仍然保留在擦拭器叶片40上的任何污染物至少部分地从所述擦拭器叶片40移除。
43.优选地,所述刮擦边缘30可以限定锐角α30,优选为小于75
°
,更优选为小于60
°
,例如约50
°
、约45
°
或更小。特别地,在传感器窗玻璃91或至少其外表面92基本上向上(例如,基本上竖向地)延伸,并且另一刮刀3位于传感器窗玻璃91的外表面92的下端下方的高度水平处的实施方式中,另一刮刀3的下表面31从所述刮刀3的刮擦边缘30延伸,并且在向后方向上倾斜离开,特别是朝向传感器窗玻璃91的外表面92延伸所在的虚拟平面p92向后倾斜离开。这种相对尖锐的角度或所谓的锐角α30可阻止从擦拭器叶片40移除的水滴和/或其他障碍物留在所述另一刮擦边缘30处。
44.排出狭缝53可形成在限定擦除表面22的元件2与另一元件3之间,优选地,另一元件3限定另一刮刀3和/或其刮刀边缘30。
45.应当理解,在使用期间,擦拭器叶片40(特别是其末梢41)可因此首先在传感器窗玻璃91的外表面92的至少一部分上面擦拭,特别是在基本上向下的方向d1上擦拭,如图2a所示。随后,可进一步运动(特别是进一步向下d2运动)的擦拭器叶片40可邻接第一刮刀1,第一刮刀1可刮除积聚在擦拭器叶片40上的障碍物61的至少一部分,如图2b所示。随后,可进一步运动(特别是进一步向下d2运动)的擦拭器叶片40可遇到限定擦除表面22的元件2,并且在所述元件2设有附加的刮擦边缘20的实施方式中,所述边缘20可刮除积聚在擦拭器叶片40上的障碍物的至少另一部分,如图2c所示。然而,在替代实施方式中,所述元件2可以不同地形成,并且例如可以具有圆化的上边缘,该上边缘可以用作刮除表面22的一部分。在遇到所述元件2之后,擦拭器叶片40(特别是其末梢41)可扫过擦除表面22,如在图2d中可见,特别是直到擦拭器叶片邻接第三刮刀3为止,如在图2e中可见。随后,所述第三刮刀3的第三刮刀边缘30可刮除仍留在擦拭器叶片40上的任何障碍物的至少一部分,如在图2f中可见。
46.随后,擦拭器叶片40可运动回到传感器窗玻璃91的外表面92上的第一位置,优选地,当擦拭器叶片40返回到所述第一位置时,擦拭器叶片40不在传感器窗玻璃91上面擦拭。另外,在使擦拭器叶片40运动回到第一位置以便再次在所述外表面92上面擦拭之前,所述擦拭器叶片40可例如在向外方向d4上运动,和/或可在一定程度上倾斜r4。例如,在到达或接近传感器窗玻璃91的外表面92上的第一位置时,擦拭器叶片40可返回到其初始状态,该初始状态可基本上对应于图2a中所示的擦拭器4和/或擦拭器叶片40的旋转状态。
47.已经发现,单向擦拭(特别是从第一位置到第二位置擦拭,且同时避免从第二位置基本上朝向第一位置擦拭)可以给出相对良好的清洁结果,特别是与双向擦拭相比。避免在擦拭器叶片40从第二位置基本上朝向第一位置的返回运动中擦拭可阻止在返回运动期间流体膜展开在传感器窗玻璃91上。擦拭器叶片40可因此在从第一位置到第二位置擦拭的同时与传感器窗玻璃91接触,而擦拭器叶片40可在擦拭器叶片40从第二位置基本上朝向第一位置运动期间与传感器窗玻璃91脱离接合。
48.然而,在替代实施方式中,擦拭器叶片40也可在向回运动时擦拭传感器窗玻璃91。即,在这样的替代实施方式中,清洁单元7可以布置成用于双向擦拭,即,来回擦拭,其中,在传感器窗玻璃91上面向后擦拭之前,通过至少部分地至少由第一刮刀1刮除障碍物来至少
部分地清洁擦拭器叶片40。
49.在实施方式中,在使擦拭器叶片40在传感器窗玻璃91上面擦拭期间和/或在清洁擦拭器叶片40期间(特别是用刮刀单元7和/或第一刮刀1和/或擦除表面22和/或另一刮刀3清洁擦拭器叶片40期间),擦拭器4和/或擦拭器叶片40可基本上保持在特定位置,特别是特定旋转位置,且可基本上线性地运动,特别是在擦拭方向d1和/或基本上向下方向d2上基本上线性地运动,首先沿着传感器窗玻璃91,且随后在第一刮刀1上面运动。优选地,当擦拭器4和/或擦拭器叶片40可随后沿着擦除表面22运动时,擦拭器4和/或擦拭器叶片40可随后仍基本上保持在所述特定预定位置。特别地,擦拭器4和/或擦拭器叶片40(其可以是在横向于附图平面的方向上延伸的伸长的擦拭器叶片40)可以在擦拭所述传感器窗玻璃91期间相对于传感器窗玻璃91的外表面处于与在所述擦除表面22上面擦拭时相对于擦除表面22处于的基本上相同的位置。例如,擦拭器4和/或擦拭器叶片40可相对于传感器窗玻璃的外表面92和/或擦除表面22和/或擦拭器4和/或擦拭器叶片40运动的方向的法线n92、n22、nd1、nd2以角度α4、α40运动,其中所述角度α4、α40可为锐角,优选为在20
°
与70
°
之间,更优选为在30
°
与60
°
之间,诸如在40
°
与50
°
之间,例如约45
°
。
50.可以理解的是,随后,特别是在将擦拭器叶片40返回到其第一位置之前,所述擦拭器叶片40可被倾斜,使得在使擦拭器叶片40运动回到所述第一位置的同时,擦拭器叶片40可处于另一旋转位置,在该另一旋转位置,擦拭器叶片40不接触传感器窗玻璃91。替代地,在双向擦拭而不是单向擦拭的情况下,擦拭器叶片40也可在使擦拭器返回(特别是基本上到相对于图2a中的旋转位置基本上成镜像的旋转位置)之前倾斜或旋转,以便于擦拭器叶片40可在返回行程时从传感器窗玻璃91擦除障碍物。此外,本领域技术人员应当理解,例如在这样的实施方式中,可以提供第二刮刀单元,特别是在传感器窗玻璃91的相对端处,例如在向上(优选为基本上竖向地)延伸的传感器窗玻璃外表面92的情况下在传感器窗玻璃91上方提供第二刮刀单元。
51.应注意,出于清楚和简明描述的目的,本文将特征描述为相同或单独的实施方式的一部分,然而,应了解,本发明的范围可包括具有所描述的特征中的全部或一些的组合的实施方式。特别地,应当注意,本领域技术人员将直接地和毫无疑义地理解,作为特定方面的一部分描述的特征,例如与清洁单元8相关的特征,也将被认为在本发明的其他方面的上下文中公开,例如在刮刀单元7的上下文中和/或在用于清洁传感器窗玻璃91的方法的上下文中公开。
52.此外,应当注意,本发明不限于这里描述的实施方式。应当理解,许多变型是可能的。这些其它变型对于本领域技术人员来说是显而易见的,并且被认为落在如所附权利要求中所阐述的本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1