直流总线调节的控制系统的制作方法
1.本发明总体上涉及电驱动系统,并且例如涉及一种用于控制电驱动系统的控制系统。
背景技术:
2.在公路和非公路应用中,电驱动系统越来越多地用于代替机械驱动系统。通常,用于作业机器的电驱动系统包括发动机、发电机、直流(dc)总线和牵引电动机。发动机可包括内燃机和/或另一动力源,其配置为产生用于使转子相对于发电机的定子旋转的机械动力。发电机可将机械动力转换成可经由dc总线供应到作业机器的不同电负载的电力。dc总线可以包括两个或更多个电端子,多个负载可以跨这些电端子连接(例如,电并联)并且接收电功率。例如,dc总线可用于向牵引电动机、辅助装置和/或作业机器的另一负载提供适当的电力(例如,经由逆变器、转换器和/或其它电路)。牵引电动机可将电力转换成适于推进作业机器(例如,经由履带、车轮和/或其它牵引装置)的机械动力(例如,旋转动力)。
3.在一些情况下,例如在双路径或多路径配置中,作业机器可包括可独立操作以驱动多个牵引装置的多个牵引电动机。例如,履带式牵引机可以使用两个平行的履带(例如,左履带和右履带)作为牵引装置,该牵引装置可以以不同的速度和/或扭矩操作,以便在特定方向上转向、转弯和/或以其他方式推进履带式牵引机。在这种情况下,每个牵引电动机可能需要具有足够的尺寸、额定值和/或能够独立地推进履带式牵引机。这种牵引电动机所需的组合功率可能是显著的(例如,当作业机器的多个牵引电动机在满负荷下操作时)。然而,单个发电机可能不总是具有足够的尺寸和/或额定值以充分支持多个牵引电动机的组合功率需求。在这种情况下,当牵引电动机所需的功率超过发电机的功率极限时,dc总线的总线电压可能崩溃(例如,以显著的速率降低)或过电压(例如,以显著的速率增加),导致作业机器停止,和/或导致另一不利影响。虽然使用更大和/或多个发电机可能是可能的解决方案,但是由于成本、尺寸、重量和/或其他约束,这样的解决方案并不总是可行的。
4.在2010年4月22日提交的授予ramamurthy等人的美国专利第8,415,909号(“'909专利”)中公开了一种控制多运动电驱动系统上的功率的尝试。特别地,'909专利公开了一种用于控制两个或更多个电动机组的电动机控制系统。'909专利公开了电动机控制系统包括从电源接收功率并将功率转换为中间功率的功率转换器和耦合到功率转换器的中间功率链路。'909专利公开了一种控制器,其被配置为使至少一个电动机驱动器基于功率转换器能够产生的功率量来限制传递到一个或多个电动机的功率量。然而,'909专利没有公开如上所述的充分解决发电机的功率极限的发电机或解决方案。例如,'909专利没有公开确定发电机的功率极限或基于发电机的功率极限调节用于操作作业机器的一个或多个牵引电动机的扭矩命令。
5.本发明的控制系统克服了上述缺点中的一个或多个。
技术实现要素:
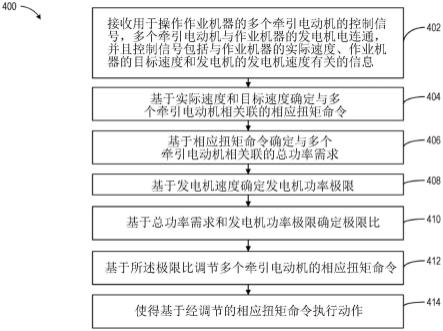
6.根据一些实现,一种方法可以包括接收用于操作作业机器的多个牵引电动机的控制信号,所述多个牵引电动机与所述作业机器的发电机电连通,并且所述控制信号包括与所述作业机器的实际速度、所述作业机器的目标速度和所述发电机的发电机速度有关的信息;基于所述实际速度和所述目标速度确定与所述多个牵引电动机相关联的相应扭矩命令;基于相应扭矩命令和相应实际电动机速度确定与所述多个牵引电动机相关联的总功率需求;基于发电机速度确定发电机功率极限;基于所述总功率需求和所述发电机功率极限确定极限比;基于所述极限比调节所述多个牵引电动机的相应扭矩命令;以及基于经调节的相应扭矩命令执行动作。
7.根据一些实现,一种装置可以包括一个或多个存储器;以及一个或多个处理器,所述一个或多个处理器通信地联接到所述一个或多个存储器,所述一个或多个处理器配置为接收用于操作作业机器的多个牵引电动机的控制信号,所述控制信号包括与所述作业机器的实际速度、所述作业机器的目标速度和可操作地联接到所述多个牵引电动机的发电机的发电机速度有关的信息;基于所述实际速度和所述目标速度确定与所述多个牵引电动机相关联的相应扭矩命令;基于发电机速度确定发电机功率极限;基于相应扭矩命令和发电机功率极限确定阈值;基于所述阈限调节所述相应扭矩命令;以及使所述多个牵引电动机基于所述经调节的相应扭矩命令操作。
8.根据一些实现,一种作业机器可以包括第一牵引电动机;第二牵引电动机;发电机,其可操作地联接到第一牵引电动机和第二牵引电动机;以及控制器,其被配置为接收与所述作业机器的实际速度、所述作业机器的目标速度和所述发电机的发电机速度有关的信息,基于所述实际速度和所述目标速度确定与所述第一牵引电动机相关联的第一扭矩命令和与所述第二牵引电动机相关联的第二扭矩命令,基于所述第一扭矩命令和所述第二扭矩命令确定总功率需求,基于所述发电机速度确定发电机功率极限,基于所述总功率需求和所述发电机功率极限来确定阈值,基于所述阈值来调节所述第一扭矩命令和所述第二扭矩命令以获得经调节的第一扭矩命令和经调节的第二扭矩命令,并且基于所述经调节的第一扭矩命令和所述经调节的第二扭矩命令来执行动作。
附图说明
9.图1是如本文所述的示例作业机器的图。
10.图2是在此描述的示例控制系统的图。
11.图3a和图3b是这里描述的控制系统的示例实现的图。
12.图4是用于控制电驱动系统的示例过程的流程图。
具体实施方式
13.图1是如本文所述的示例作业机器100的图。作业机器100可包括牵引机、推土机、装载机、卡车、机动平地机、挖掘机、摊铺机和/或配置为执行与操作相关的任务的另一作业机器100。如图1所示,作业机器100包括框架102、牵引元件104、机具106、操作者驾驶室108、发动机110和电驱动系统112。牵引元件104可包括履带、轮和/或其它牵引装置,所述牵引装置可移动地联接到框架102并由电驱动系统112驱动以推进作业机器100。机具106可包括铲
刀、松土机、绞盘、铲斗、剪切机、锤子和/或可移动地联接到框架102并配置为执行与作业机器100相关联的任务的另一作业工具。操作者驾驶室108可联接至框架102并为作业机器100的操作者提供用户接口114。用户接口114可以包括输入装置(例如操纵杆、杠杆、按钮、拨号盘、方向盘、踏板、触摸屏装置等)和/或输出装置(例如仪表、显示器、扬声器、触觉反馈装置等),所述输入装置被配置为从操作者接收用于操作作业机器100的信息(例如目标行驶速度,目标轨道或车轮速度,目标发动机速度,转向命令等),所述输出装置被配置为向操作者输出信息。
14.发动机110包括柴油发动机、汽油发动机、天然气发动机和/或配置为产生可用于启动电驱动系统112的机械动力的另一动力源。电驱动系统112可以配置为双路径或多路径布置,并且能够同时且独立地操作作业机器100的多个牵引电动机120。电驱动系统112可以包括发电机116、公共总线118、一组牵引电动机120、控制器122和一组传感器124。发电机116可以包括转子,该转子机械地联接到发动机110并且被配置为相对于定子旋转以经由定子的一个或多个绕组感应出电流(例如,交流电(ac))。公共总线118可以包括电端子、连接器、电容器、逆变器、转换器和/或被配置为将来自发电机116的ac电压(例如,三相或多相电压)转换为总线电压(例如,dc电压)的其它电路部件,该总线电压被传送到牵引电动机120、控制器122和/或作业机器100的另一电负载。在一些示例中,公共总线118可以将总线电压转换为适于操作所连接的负载的不同的dc电压和/或ac电压。牵引电动机120可以包括电动机,该电动机被配置为将来自公共总线118的电功率转换成机械功率以引起牵引元件104的移动。
15.控制器122包括处理器126和存储器128。处理器126以硬件、固件和/或硬件和软件的组合来实现,所述硬件、固件和/或硬件和软件的组合能够被编程以执行与电驱动系统112、发动机110和/或作业机器100相关联的功能。存储器128包括随机存取存储器(ram)、只读存储器(rom),和/或存储将由处理器126执行的信息和/或指令的另一类型的动态或静态存储装置。传感器124可以包括测量装置、感测装置、开关、编码器和/或被配置为获得传感器数据(例如,与电驱动系统112、发动机110和/或作业机器100的操作条件有关的信息)的另一装置的组合。例如,传感器124可配置为提供与作业机器100的行驶速度、履带或车轮速度、牵引电动机速度、发动机速度、发电机速度、转向角、总线电压和/或其它操作条件有关的信息。在一些示例中,传感器124可以包括全球定位系统(gps)装置,全球导航卫星系统(gnss)装置和/或被配置为提供作业机器100的位置的另一位置感测装置。如果作业机器100包括机具106,则传感器124可提供与机具106的操作条件相关的信息。
16.如上所述,图1是作为示例提供的。其它示例可以不同于结合图1所描述的。
17.图2是在此描述的示例控制系统200的图。如图2所示,控制系统200可以包括与用户接口114、传感器124和牵引电动机120电连通(例如,经由公共总线118)的控制器122。控制器122可以包括速度控制模块202、扭矩控制模块204、极限估算模块206,以及降额控制模块208,其被配置为用于执行与操作电驱动系统112相关联的一个或多个功能。例如,控制器122可以被配置为接收由操作者经由用户接口114提供的控制信号,确定与牵引电动机120相关联的总功率需求,基于总功率需求和发电机功率极限来确定功率阈值,并且基于功率阈值来调节牵引电动机120的相应扭矩命令。在一些示例中,控制器122可以配置有更少的模块、额外的模块和/或不同的模块布置。控制器122可以经由公共总线118的逆变器、转换
器和/或另一电路部件与用户接口114、传感器124和牵引电动机120电连通。另外地或可选地,控制器122可以与发动机110、发电机116和/或公共总线118的另一电负载电连通。
18.如图2进一步所示,速度控制模块202可配置为经由用户接口114和/或传感器124接收用于操作作业机器100的牵引电动机120的一个或多个控制信号。例如,控制信号可以包括目标速度210和转向命令212(例如,经由用户接口114提供)以及传感器数据214(例如,经由传感器124提供)。目标速度210可以对应于操作者要求的作业机器100的行驶速度、履带速度、车轮速度和/或发动机速度。转向命令212可以对应于操作者要求的作业机器100的目标方向和/或目标转向角。传感器数据214可以包括与由传感器124观察到的作业机器100的行驶速度、履带速度、车轮速度、牵引电动机速度、发动机速度、发电机速度、转向角和/或总线电压有关的信息。在一些示例中,例如当传感器124与用户接口114的输入装置电连通时,速度控制模块202可基于由传感器124提供的传感器数据214获得和/或导出目标速度210和/或转向命令212。在一些示例中,例如当用户接口114包括向操作者提供传感器数据214的输出装置时,速度控制模块202可以经由用户接口114获得传感器数据214。
19.在一些实现中,速度控制模块202可以被配置为基于目标速度210、转向命令212和/或传感器数据214(例如,作业机器100的实际速度)来确定速度命令216。例如,速度控制模块202可确定用于操作第一牵引电动机120-1(例如,联接到作业机器100左侧的牵引元件104)的第一速度命令216-1和用于操作第二牵引电动机120-2(例如,联接到作业机器100右侧的牵引元件104)的第二速度命令216-2。在转向命令212为空的情况下(例如,操作者不提供转向输入),第一速度命令216-1和第二速度命令216-2可以基本上相等(例如,以使作业机器100沿直线路径行进)。在转向命令212是非零值的情况下(例如,操作者提供转向输入),第一速度命令216-1和第二速度命令216-2可以是不同的(例如,以使得作业机器100在操作者所请求的方向上转向的方式在牵引电动机120之间成比例)。另外地或可替代地,速度控制模块202可以调节速度命令216(例如,使用平滑过程、抗扭转过程、降额过程和/或类似过程)以改进和/或促进牵引电动机120的操作。
20.如图2中进一步所示,扭矩控制模块204可以被配置为接收由速度控制模块202提供的速度命令216,并且确定用于操作牵引电动机120的相应扭矩命令218。例如,第一扭矩命令218-1可以对应于由第一牵引电动机120-1产生以满足第一速度命令216-1的扭矩量,而第二扭矩命令218-2可以对应于由第二牵引电动机120-2产生以满足第二速度命令216-2的扭矩量。扭矩命令218可以使牵引电动机120实现作业机器100的操作者所要求的行进速度和/或行进方向。在一些示例中,扭矩控制模块204可以使用比例积分微分(pid)控制器和/或能够确定使牵引电动机120能够满足目标速度210和/或转向命令212的适当扭矩命令218的另一控制器。在一些示例中,扭矩控制模块204可以接收来自用户接口114的目标速度210和/或转向命令212,来自传感器124的传感器数据214,和/或来自速度控制模块202的单个速度命令216,以及基于转向命令212的牵引电动机120之间的比例扭矩命令218。
21.如图2中进一步所示,极限估计模块206可以被配置为从传感器124接收传感器数据214,并且基于传感器数据214确定发电机功率极限220。例如,极限估计模块206可以基于包括在传感器数据214中的信息来确定发电机速度(例如,发电机116的转子相对于定子的旋转速度),和/或基于包括在传感器数据214中的发动机速度、行驶速度和/或其他信息来导出发电机速度。在一些示例中,极限估计模块206可以基于传感器数据214确定公共总线
118的总线电压(例如,目标总线电压和/或实际总线电压),并且基于总线电压确定发电机扭矩。极限估计模块206可以使用pid控制器和/或被配置为在特定情况下确定发电机扭矩的另一控制器来确定发电机扭矩。基于发电机速度和发电机扭矩,极限估计模块206可以被配置为确定发电机功率极限220(例如,发电机116可以以发电机速度输出的最大电功率量)。在一些示例中,诸如当用户接口114包括向操作者提供传感器数据214的输出装置时,极限估计模块206可以经由用户接口114获得传感器数据214。
22.如图2中进一步所示,降额控制模块208可以被配置为接收由扭矩控制模块204提供的扭矩命令218,接收由极限估计模块206提供的发电机功率极限220,并且确定用于操作牵引电动机120的降额扭矩命令222。降额控制模块208可以确定牵引电动机120的相应牵引电动机速度(例如,基于由传感器124提供的传感器数据214),并且基于扭矩命令218和相应牵引电动机速度确定牵引电动机120的相应功率需求(例如,通过将扭矩命令218乘以相应牵引电动机速度)。例如,降额控制模块208可以基于第一扭矩命令218-1确定与第一牵引电动机120-1相关联的第一功率需求,并且基于第二扭矩命令218-2确定与第二牵引电动机120-2相关联的第二功率需求。降额控制模块208可以基于相应功率需求(例如,基于相应功率需求的聚集或总和)来确定总功率需求,基于总功率需求和发电机功率极限220来确定阈值,并且使用该阈值来降额和/或以其他方式调节扭矩命令218。
23.在一些实现中,降额控制模块208可以被配置为将阈值定义为极限比(例如,发电机功率极限220和与牵引电动机120相关联的总功率需求之间的比)。另外地或可选地,可以使用百分比、分数和/或定义总功率需求与发电机功率极限220之间的关系的另一值来定义阈值。降额控制模块208可通过极限比调节扭矩命令218以确定降额扭矩命令222。例如,降额控制模块208可以将第一扭矩命令218-1乘以极限比以确定第一降额扭矩命令222-1,并且将第二扭矩命令218-2乘以极限比以确定第二降额扭矩命令222-2。该极限比可以被配置为确保与牵引电动机120相关联的总功率需求接近并且不超过发电机功率极限220。例如,当总功率需求超过发电机功率极限220时,极限比可以对应于小于1的值,使得扭矩命令218乘以极限比降额扭矩命令218。当总功率需求小于或基本上等于发电机功率极限220时,极限比可饱和到值1,使得扭矩命令218乘以极限比不会增加或以其他方式改变扭矩命令218。
24.在一些实现中,降额控制模块208可以被配置为将降额扭矩命令222传输到相应牵引电动机120(例如,经由公共总线118)和/或以其他方式使牵引电动机120能够根据降额扭矩命令222操作。附加地或替代地,降额控制模块208可以被配置为将与牵引电动机120相关联的总功率需求与发电机功率极限220进行比较,以确定总功率需求是否超过发电机功率极限220。如果总功率需求超过发电机功率极限220,则降额控制模块208可确定极限比,并通过极限比降额相应扭矩命令218。如果总功率需求不超过发电机功率极限220,则降额控制模块208可将扭矩命令218传递给相应牵引电动机120而无需修改。降额控制模块208可以间歇地、周期性地和/或连续地实时监控总功率需求和/或发电机功率极限220的变化,以确保在不同的操作条件下调节公共总线118。因此,降额控制模块208可维持公共总线118上的平衡且防止公共总线118的总线电压的崩溃或过电压。
25.如上所述,图2是作为示例提供的。其它示例可以不同于结合图2所描述的。
26.图3a和图3b是这里描述的控制系统200的示例实现300的图。如图3a中所示,并且由附图标记302表示,控制系统200可以确定牵引电动机120的相应功率需求,基于相应功率
需求的聚集确定总功率需求,确定发电机功率极限,基于发电机功率极限与总功率需求之间的比确定极限比,并且如上所述使得结合极限比执行动作。在第一示例304中,牵引电动机120的相应功率需求(例如,270kw)可以被平衡(例如,操作者不提供转向输入和/或输出负载被均等地分配给每个牵引电动机120),并且总功率需求(例如,540kw)可以在发电机功率极限(例如,650kw)内。由于总功率需求小于发电机功率极限,所以极限比可以饱和到值1,并且控制系统200可以不施加降额。在第二示例306中,牵引电动机120的相应功率需求(例如,270kw和320kw)可以是不平衡的(例如,操作者在一个牵引电动机120上提供转向输入和/或输出负载大于另一个牵引电动机120),并且总功率需求(例如,590kw)可以在发电机功率极限(例如,650kw)内。由于总功率需求小于发电机功率极限,所以极限比可以饱和到值1,并且控制系统200可以不施加降额。
27.如图3a中进一步所示,并且根据第三示例308,牵引电动机120的相应功率需求(例如,540kw)可以被平衡,并且总功率需求(例如,1080kw)可以超过发电机功率极限(例如,650kw)。由于总功率需求大于发电机功率极限,所以极限比可以是小于1的值(例如,0.602),并且控制系统200可以应用降额。在第四示例310中,牵引电动机120的相应功率需求(例如,540kw和270kw)可以是不平衡的,并且总功率需求(例如,810kw)可以超过发电机功率极限(例如,650kw)。由于总功率需求大于发电机功率极限,所以极限比可以是小于1的值(例如,0.802),并且控制系统200可以应用降额。出于说明的目的,发电机功率极限以单个值(例如,650kw)示出。应当理解,发电机功率极限可以随时间变化(例如,基于发电机速度、发电机扭矩、发动机速度和/或作业机器100的另一操作条件的变化),并且控制系统200可配置为基于发电机功率极限的变化来更新极限比。
28.如图3b所示,并且通过附图标记312、控制系统200可以如上所述基于极限比调节牵引电动机120的相应扭矩命令。在第一示例304中,控制系统200可以不应用降额,或使用极限比(例如,1.000)来提供实际上未修改的降额扭矩命令(例如,600nm)。在第二示例306中,控制系统200可以不应用降额,或使用极限比(例如,1.000)来提供实际上未修改的降额扭矩命令(例如,600nm和711nm)。在第三示例308中,控制系统200可基于极限比(例如,0.602)施加降额并调节扭矩命令(例如,1200nm),以提供降额扭矩命令(例如,722nm)。在第四示例310中,控制系统200可基于极限比(例如,0.802)施加降额并调节扭矩命令(例如,1200nm和600nm),以提供降额扭矩命令(例如,963nm和481nm)。以此方式,控制系统200可以提供被配置为向牵引电动机120递送接近并且不超过发电机116的功率极限的功率量的降额扭矩命令。
29.如上所述,提供图3a和图3b作为示例。其他示例可以不同于结合图3a和图3b所描述的。
30.图4是用于控制电驱动系统(例如,作业机器100的电驱动系统112)的示例过程400的流程图。图4的一个或多个处理块可由控制器(例如,控制系统200和/或作业机器100的控制器122)和/或由与控制器分离或包括控制器的另一部件或一组部件(例如,速度控制模块202、扭矩控制模块204、极限估计模块206、降额控制模块208等)来执行。
31.如图4所示,过程400可以包括接收用于操作作业机器的多个牵引电动机的控制信号,所述多个牵引电动机与作业机器的发电机电连通,并且所述控制信号包括与作业机器的实际速度、作业机器的目标速度和发电机的发电机速度有关的信息(框402)。例如,如上
所述,控制器(例如,使用处理器126、存储器128等)可接收用于操作作业机器的多个牵引电动机的控制信号。多个牵引电动机可以与作业机器的发电机电连通。控制信号可以包括与作业机器的实际速度、作业机器的目标速度和发电机的发电机速度有关的信息。
32.如图4中进一步所示,过程400可以包括基于实际速度和目标速度确定与多个牵引电动机相关联的相应扭矩命令(框404)。例如,如上所述,控制器(例如,使用处理器126、存储器128等)可以基于实际速度和目标速度确定与多个牵引电动机相关联的相应扭矩命令。
33.如图4中进一步所示,过程400可以包括基于相应扭矩命令确定与多个牵引电动机相关联的总功率需求(框406)。例如,如上所述,控制器(例如,使用处理器126、存储器128等)可以基于相应扭矩命令确定与多个牵引电动机相关联的总功率需求。
34.如图4中进一步所示,过程400可以包括基于发电机速度确定发电机功率极限(框408)。例如,如上所述,控制器(例如,使用处理器126、存储器128等)可以基于发电机速度确定发电机功率极限。
35.如图4中进一步所示,过程400可以包括基于总功率需求和发电机功率极限来确定极限比(框410)。例如,如上所述,控制器(例如,使用处理器126、存储器128等)可以基于总功率需求和发电机功率极限来确定极限比。
36.如图4中进一步所示,过程400可包括基于极限比调节多个牵引电动机的相应扭矩命令(框412)。例如,如上所述,控制器(例如,使用处理器126、存储器128等)可以基于极限比调节多个牵引电动机的相应扭矩命令。
37.如图4中进一步所示,过程400可以包括使得基于经调节的相应扭矩命令来执行动作(框414)。例如,如上所述,控制器(例如,使用处理器126、存储器128和/或类似物)可以基于经调节的相应扭矩命令来执行动作。
38.过程400可包括结合图4所描述的那些的变型和/或附加实现,诸如本文别处所描述的任何单个实现或实现的任何组合。虽然图4示出了过程400的示例框,但是在一些示例中,过程400可以包括比图4中描绘的那些更多的框、更少的框、不同的框或不同布置的框。另外,或可选地,可以并行执行过程400的两个或更多个框。
39.工业实用性
40.在公路和非公路应用中,电驱动系统越来越多地用于代替机械驱动系统。通常,用于作业机器的电驱动系统包括发动机、发电机、dc总线和牵引电动机。发动机可包括内燃机和/或另一动力源,其配置为产生用于使转子相对于发电机的定子旋转的机械动力。发电机可将机械动力转换成可经由dc总线供应到作业机器的不同电负载的电力。dc总线可以包括两个或更多个电端子,多个负载可以跨这些电端子连接并接收电功率。例如,dc总线可用于向牵引电动机、辅助装置和/或作业机器的另一负载提供适当的电力(例如,经由逆变器、转换器和/或其它电路)。牵引电动机可将电力转换成适于推进作业机器(例如,经由履带、车轮和/或其它牵引装置)的机械动力(例如,旋转动力)。
41.在一些情况下,例如在双路径或多路径配置中,作业机器可包括可独立操作以驱动多个牵引装置的多个牵引电动机。例如,履带式牵引机可以使用两个平行的履带(例如,左履带和右履带)作为牵引装置,该牵引装置可以以不同的速度和/或扭矩操作,以便在特定方向上转向、转弯和/或以其他方式推进履带式牵引机。在这种情况下,每个牵引电动机可能需要具有足够的尺寸、额定值和/或能够独立地推进履带式牵引机。这种牵引电动机所
需的组合功率可能是显著的(例如,当作业机器的多个牵引电动机在满负荷下操作时)。然而,单个发电机可能不总是具有足够的尺寸和/或额定值以充分支持多个牵引电动机的组合功率需求。在这种情况下,当牵引电动机所需的组合功率超过发电机的功率极限时,dc总线的总线电压可能崩溃或过电压,导致作业机器停止,和/或导致另一不利影响。虽然使用更大和/或多个发电机可能是可能的解决方案,但是由于成本、尺寸、重量和/或其他约束,这样的解决方案并不总是可行的。
42.在此描述的控制系统提供了一种调节电驱动系统的公共总线的解决方案,该电驱动系统具有单个发电机和多个牵引电动机(例如,在双路径或多路径配置中)。例如,控制系统可以被配置为确定与电驱动系统中的牵引电动机相关联的总功率需求,确定发电机的功率极限,基于总功率需求和发电机功率极限确定阈值,以及基于阈值调节牵引电动机的相应扭矩命令。在一些示例中,控制系统可以使用基于发电机功率极限与总功率需求之间的比的极限比来定义阈值,并且通过极限比来降额牵引电动机的相应扭矩命令。例如,当总功率需求超过发电机功率极限时,极限比可以对应于小于1的值,而当总功率需求小于或基本上等于发电机功率极限时,极限比饱和到1的值。由此,控制系统可以被配置为在电驱动系统的操作期间相对于发电机功率极限平衡总功率需求。
43.因此,在此描述的控制系统克服了与当前可用的电驱动系统相关联的一个或多个问题。例如,通过基于发电机的功率极限和牵引电动机的总功率需求确定极限比,并且通过基于极限比降额牵引电动机的相应扭矩命令,控制系统确保总功率需求保持与发电机功率极限平衡。此外,通过基于总功率需求和/或发电机功率极限的变化来调节极限比,控制系统能够在变化的操作条件下有效地调节和防止电驱动系统的公共总线的崩溃或过电压。该控制系统还使得具有有限和/或可变容量的发电机能够有效地用在多路径配置中,并且由此克服了实施更大发电机以支持多个牵引电动机的需要。该控制系统进一步克服了在电驱动系统中实现多个发电机的需要,并且由此节省了否则可能需要控制多个发电机的计算资源。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1