车辆的制动控制装置的制作方法
1.本发明涉及车辆的制动控制装置。
背景技术:
2.在专利文献1中记载了执行判定车辆是否在低μ路上行驶的判定处理的制动控制装置的一个例子。在该制动控制装置中,在基于车辆的驾驶员的制动操作的车辆制动时,在车辆的车身速度小于判定速度、以及驱动轮与从动轮的车轮速度差为判定速度差以上的双方成立时,判定为车辆在低μ路上行驶。
3.此外,车身速度基于各车轮的车轮速度中的至少一个车轮速度而导出。
4.专利文献1:日本特开平9-286315号公报
5.在四轮驱动车在低μ路上行驶时的制动时,有时会产生在全部车轮中产生规定的减速滑移的现象亦即级联锁止(cascade lock)。在产生级联锁止时,全部车轮的车轮速度与车身的减速度相比更急剧降低,因此无法适当地导出车身速度。另外,前轮与后轮的车轮速度差不会变大。其结果是,无法进行车辆在低μ路上行驶的判定。因此,期望在四轮驱动车的制动时,检知级联锁止的产生的技术。
技术实现要素:
6.用于解决上述课题的车辆的制动控制装置应用于车辆,上述车辆具备:多个车轮;多个车轮速度传感器,输出与对应的车轮的速度亦即车轮速度相对应的检测信号;以及前后加速度传感器,输出与车辆的前后加速度相对应的检测信号。将基于上述前后加速度传感器的检测信号而导出的上述车辆的前后方向的减速度设为前后减速度检测值,将上述车轮速度的减少速度设为车轮减速度,将基于上述车轮速度传感器的检测信号而导出的车轮速度设为车轮速度检测值。在该情况下,制动控制装置具备:车轮减速度导出部,导出上述车轮速度检测值的减少速度作为车轮减速度运算值;平均值导出部,导出各上述车轮的上述车轮减速度运算值的平均值作为车轮减速度平均值;判定部,基于上述车轮减速度平均值和上述前后减速度检测值,判定各上述车轮的上述车轮减速度的平均值的增大速度大于上述车辆的前后方向的减速度的增大速度的状态亦即滑移增大状态是否产生了判定时间以上;以及检知部,在车辆制动时判定为上述滑移增大状态产生了上述判定时间以上时,检知级联锁止的产生。
7.在车辆制动时产生了级联锁止的情况下,与仅在一部分车轮中产生减速滑移的情况相比,全部车轮的车轮减速度的平均值的增大速度变大,并且该平均值的增大速度较大的状态持续。因此,在上述结构中,基于车轮减速度平均值和前后减速度检测值,进行滑移增大状态是否产生了判定时间以上的判定。而且,在车辆制动时判定为滑移增大状态产生了判定时间以上时,检知级联锁止的产生。
8.即,根据上述结构,能够在车辆制动时检知级联锁止的产生。
附图说明
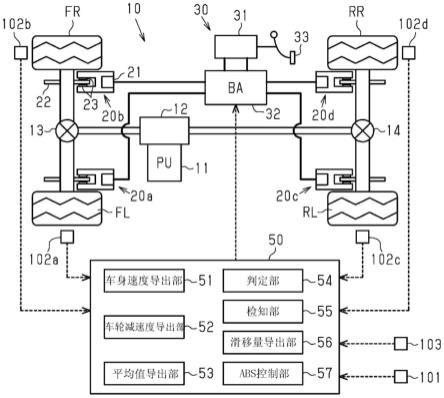
9.图1是表示实施方式的车辆的制动控制装置的功能结构和具备该制动控制装置的车辆的简要结构的图。
10.图2是对该制动控制装置执行的处理例程之一进行说明的流程图。
11.图3的(a)、(b)以及(c)是产生了级联锁止的情况下的时间图。
12.图4是对该制动控制装置执行的处理例程之一进行说明的流程图。
13.图5是对该制动控制装置执行的处理例程之一进行说明的流程图。
14.图6的(a)~(c)是在级联锁止的产生中开始防抱死制动控制的情况下的时间图。
具体实施方式
15.以下,根据图1~图6对车辆的制动控制装置的一个实施方式进行说明。
16.在图1中图示了具备本实施方式的制动控制装置50的车辆10。车辆10具备左前轮fl、右前轮fr、左后轮rl以及右后轮rr作为车轮。车辆10是全部车轮fr、fl、rr、rl作为驱动轮发挥功能的四轮驱动车。从车辆10的驱动装置11输出的驱动力被输入到中央差速器12。输入到中央差速器12的驱动力被分配到前差速器13侧和后差速器14侧。输入到前差速器13的驱动力被分配到左前轮fl和右前轮fr。输入到后差速器14的驱动力通过后差速器14被分配到左后轮rl和右后轮rr。
17.在车辆10中,针对各车轮fl、fr、rl、rr分别独立地设置有制动机构20a、20b、20c、20d。各制动机构20a~20d具有与车轮fl、fr、rl、rr一体旋转的旋转体22、和被推压至旋转体22的摩擦材料23。轮缸21内的液压越高,将摩擦材料23推压至旋转体22的力越大。将摩擦材料23推压至旋转体22的力越大,针对车轮fl、fr、rl、rr的制动力越大。
18.车辆10的制动装置30具有液压产生装置31和制动致动器32。液压产生装置31在驾驶员操作制动踏板等制动操作部件33时,产生与该操作量相对应的液压。而且,在由驾驶员进行制动操作的情况下,与在液压产生装置31中产生的液压相对应的量的制动液被供给到各轮缸21内。由此,向各车轮fl、fr、rl、rr赋予制动力。制动致动器32能够通过基于制动控制装置50的控制,分别独立地调整各轮缸21内的液压。即,能够通过制动致动器32的动作来分别独立地调整针对各车轮fl、fr、rl、rr的制动力。
19.接下来,对制动控制装置50进行说明。
20.从各种传感器向制动控制装置50输入检测信号。作为传感器,能够列举制动开关101、车轮速度传感器102a、102b、102c、102d以及前后加速度传感器103。制动开关101检知制动操作部件33是否被操作,输出与该检知结果相对应的信号作为检测信号。车轮速度传感器102a~102d按照每个车轮fl、fr、rl、rr而设置。而且,车轮速度传感器102a~102d检测对应的车轮fl、fr、rl、rr的速度亦即车轮速度,输出与该检测结果相对应的信号作为检测信号。前后加速度传感器103检测车辆10的前后方向的加速度亦即前后加速度,输出与该检测结果相对应的信号作为检测信号。
21.在以后的记载中,将由制动控制装置50基于来自车轮速度传感器102a~102d的检测信号而导出的车轮fl、fr、rl、rr的车轮速度称为“车轮速度检测值vw”。将由制动控制装置50基于来自前后加速度传感器103的检测信号而导出的车辆10的前后方向的减速度称为“前后减速度检测值gx”。此外,在前进的车辆10减速的情况下,其减速度越大,前后减速度
检测值gx越大。另一方面,在前进的车辆10加速的情况下,其加速度越大,前后减速度检测值gx越小。例如,在车辆10在水平路上加速的情况下,前后减速度检测值gx成为负值,车辆10的加速度越大,前后减速度检测值gx的绝对值越大。即,能够导出基于来自前后加速度传感器103的检测信号而导出的车辆10的前后加速度与“﹣1”的积作为前后减速度检测值gx。此外,在制动控制装置50中,通过对前后减速度检测值gx进行时间微分,从而导出前后减速度检测值gx的增大速度dgx。也将前后减速度检测值的增大速度dgx称为前后减速度检测值gx的增大梯度。
22.制动控制装置50具有车身速度导出部51、车轮减速度导出部52、平均值导出部53、判定部54、检知部55、滑移量导出部56以及abs控制部57作为功能部。
23.车身速度导出部51基于各车轮fl、fr、rl、rr中的至少一个车轮的车轮速度检测值vw,导出车辆10的车身速度的估计值亦即估计车身速度vs0。在本实施方式中,车身速度导出部51按照每个规定的控制周期导出估计车身速度vs0。将上次导出的估计车身速度vs0设为估计车身速度的上次值vs0(n﹣1),将本次导出的估计车身速度vs0设为估计车身速度的最新值vs0(n)。另外,将对车轮速度检测值vw进行时间微分而得到的值设为“车轮速度微分值δvw”。在该情况下,车身速度导出部51导出估计车身速度的上次值vs0(n﹣1)与车轮速度微分值δvw之和作为估计车身速度的最新值vs0(n)。因此,在车轮速度检测值vw变高时,车轮速度微分值δvw为正,因此估计车身速度vs0变高。另一方面,在车轮速度检测值vw变低时,车轮速度微分值δvw为负,因此估计车身速度vs0变低。
24.但是,在导出估计车身速度的最新值vs0(n)时,设定规定的上限保护以及下限保护。即,在车轮速度微分值δvw大于上限保护的情况下,车身速度导出部51导出估计车身速度的上次值vs0(n﹣1)与上限保护之和作为估计车身速度的最新值vs0(n)。另一方面,在车轮速度微分值δvw小于下限保护的情况下,车身速度导出部51导出估计车身速度的上次值vs0(n﹣1)与下限保护之和作为估计车身速度的最新值vs0(n)。
25.车轮减速度导出部52导出各车轮fl、fr、rl、rr的车轮减速度运算值dvw。即,车轮减速度导出部52导出车轮速度检测值vw的减少速度作为车轮减速度运算值dvw。例如,车轮减速度导出部52导出对车轮速度检测值vw进行时间微分而得到的值与“﹣1”的积作为车轮减速度运算值dvw。
26.平均值导出部53导出各车轮fl、fr、rl、rr的车轮减速度运算值dvw的平均值作为车轮减速度平均值dvwav。并且,平均值导出部53通过对车轮减速度平均值dvwav进行时间微分,从而导出车轮减速度平均值dvwav的增大速度ddvwav。也将车轮减速度平均值的增大速度ddvwav称为车轮减速度平均值dvwav的增大梯度。
27.判定部54基于车轮减速度平均值dvwav和前后减速度检测值gx,判定滑移增大状态是否产生了判定时间tmcr以上。滑移增大状态是指各车轮fl、fr、rl、rr的车轮减速度的平均值的增大速度比车辆10的前后方向的减速度的增大速度大的状态。后述判定处理的具体内容。
28.在车辆制动时判定为滑移增大状态产生了判定时间tmcr以上时,检知部55检知级联锁止的产生。级联锁止是指在被输入驱动装置11的驱动力的任意一个驱动轮中都产生规定的减速滑移的现象。在车辆10中,全部车轮fl、fr、rl、rr是驱动轮。因此,在车轮fl、fr、rl、rr的任意一个中都产生规定的减速滑移的状态是级联锁止。
29.在由检知部55检知到级联锁止的产生以后,滑移量导出部56导出各车轮fl、fr、rl、rr的滑移量slpa。滑移量slpa是指车轮fl、fr、rl、rr的减速滑移的程度。后述滑移量slpa的导出处理。
30.abs控制部57在由检知部55检知到级联锁止的产生以后,以由滑移量导出部56导出的滑移量slpa增大为条件,开始通过针对车轮fl、fr、rl、rr的制动力的调整来抑制车轮fl、fr、rl、rr的减速滑移的防抱死制动控制。后述判定防抱死制动控制的开始的处理。在以后的记载中,将防抱死制动控制称为“abs控制”。
31.接下来,参照图2,对为了判定滑移增大状态是否产生了判定时间tmcr以上而判定部54所执行的处理例程进行说明。本处理例程按照每个规定的控制周期被反复执行。
32.在本处理例程中,在步骤s11中,进行前后减速度检测值gx是否大于前后减速度判定值gxth的判定。前后减速度判定值gxth被设定为车辆10是否由于车辆制动而减速的判断基准。在前后减速度检测值gx为前后减速度判定值gxth以下的情况下(s11:否),不能判定为车辆10由于车辆制动而减速,因此处理转移至步骤s18。另一方面,在前后减速度检测值gx大于前后减速度判定值gxth的情况下(s11:是),能够判定为车辆10由于车辆制动而减速,因此处理转移至下一步骤s12。
33.在步骤s12中,在将从车轮减速度平均值的增大速度ddvwav减去前后减速度检测值的增大速度dgx而得到的值设为导出差dd1的情况下,进行导出差dd1是否大于第一导出差判定值ddth1的判定。导出差dd1是偏差的一个例子。第一导出差判定值ddth1被设定为车轮减速度平均值的增大速度ddvwav是否大于前后减速度检测值的增大速度dgx的判断基准。例如,作为第一导出差判定值ddth1,可以设定“0”,也可以设定比“0”大的值。
34.在步骤s12中,在导出差dd1大于第一导出差判定值ddth1的情况下(是),能够判定为车轮减速度平均值的增大速度ddvwav大于前后减速度检测值的增大速度dgx,因此处理转移至下一步骤s13。在步骤s13中,计数器值cnt增加“1”。然后,处理转移至步骤s16。另一方面,在步骤s12中,在导出差dd1为第一导出差判定值ddth1以下的情况下(否),不能判定为车轮减速度平均值的增大速度ddvwav大于前后减速度检测值的增大速度dgx,因此处理转移至下一步骤s14。
35.在步骤s14中,进行导出差dd1是否为第二导出差判定值ddth2以下的判定。第二导出差判定值ddth2被设定为车轮减速度平均值的增大速度ddvwav是否为前后减速度检测值的增大速度dgx以下的判断基准。作为第二导出差判定值ddth2,设定比第一导出差判定值ddth1小的值。在设定比“0”大的值作为第一导出差判定值ddth1的情况下,优选设定“0”以上的值作为第二导出差判定值ddth2。在导出差dd1为第二导出差判定值ddth2以下的情况下(s14:是),能够判定为车轮减速度平均值的增大速度ddvwav为前后减速度检测值的增大速度dgx以下,因此处理转移至下一步骤s15。在步骤s15中,导出从计数器值cnt减去“1”而得到的值和“0”中的较大的值作为计数器值cnt。然后,处理转移至步骤s16。另一方面,在步骤s14中,在导出差dd1大于第二导出差判定值ddth2的情况下(否),不能判定为车轮减速度平均值的增大速度ddvwav为前后减速度检测值的增大速度dgx以下,因此处理转移至步骤s16。在该情况下,保持计数器值cnt。在本实施方式中,如上述那样,按照每个规定的控制周期执行更新处理,在该更新处理中,在判定为车轮减速度平均值的增大速度ddvwav大于前后减速度检测值的增大速度dgx时,使计数器值cnt增加,在判定为车轮减速度平均值的增
大速度ddvwav为前后减速度检测值的增大速度dgx以下时,使计数器值cnt减少。
36.在步骤s16中,进行计数器值cnt是否为计数器判定值cntth以上的判定。计数器判定值cntth是与判定时间tmcr对应的计数器值cnt。因此,在本实施方式中,在计数器值cnt为计数器判定值cntth以上时,判定为滑移增大状态产生了判定时间tmcr以上。然后,在计数器值cnt为计数器判定值cntth以上的情况下(s16:是),处理转移至下一步骤s17。在步骤s17中,状态标志flg1被设置接通。即,状态标志flg1是在判定为滑移增大状态产生了判定时间tmcr以上时被设置接通,另一方面在不判定为滑移增大状态产生了判定时间tmcr以上时被设置断开的标志。然后,暂时结束本处理例程。
37.另一方面,在步骤s16中,在计数器值cnt小于计数器判定值cntth的情况下(否),处理转移至下一步骤s18。
38.在步骤s18中,状态标志flg1被设置断开。即,不判定为滑移增大状态产生了判定时间tmcr以上。然后,暂时结束本处理例程。
39.参照图3,对在车辆制动时产生级联锁止的情况进行说明。
40.如图3的(a)、(b)、(c)所示,在车辆制动中的定时t11,在全部的车轮fl、fr、rl、rr中产生减速滑移。于是,尽管前后减速度检测值gx几乎没有变化,但车轮减速度平均值dvwav变大。此时,在产生级联锁止的情况下,在定时t12,从车轮减速度平均值的增大速度ddvwav减去前后减速度检测值的增大速度dgx而得到的值亦即导出差dd1比第一导出差判定值ddth1大。
41.此处,在仅在各车轮fl、fr、rl、rr中的一部分车轮产生减速滑移的情况下,不怎么产生减速滑移的车轮的车轮减速度小,因此与产生级联锁止的情况相比,车轮减速度平均值的增大速度ddvwav并不那么大。因此,与产生级联锁止的情况相比,导出差dd1不易变得大于第一导出差判定值ddth1。即,计数器值cnt不易变大。
42.然后,在定时t13,计数器值cnt变成计数器判定值cntth以上,因此通过判定部54判定为滑移增大状态产生了判定时间tmcr以上。于是,通过检知部55检知级联锁止的产生。
43.此外,噪声成分叠加在来自前后加速度传感器103的检测信号中。因此,在前后减速度检测值gx中叠加有该噪声成分,因此其值发生变动。其结果是,尽管实际上是滑移增大状态,但有时前后减速度检测值的增大速度dgx暂时比车轮减速度平均值的增大速度ddvwav大。考虑在像这样前后减速度检测值的增大速度dgx暂时比车轮减速度平均值的增大速度ddvwav大时将计数器值cnt复位为“0”的情况。在该情况下,由于噪声成分叠加在来自前后加速度传感器103的检测信号中而计数器值cnt被复位为“0”的现象频发,而有可能计数器值cnt变成计数器判定值cntth以上延迟。即,有可能级联锁止的产生的检知延迟。
44.从该点出发,在本实施方式中,在导出差dd1为第二导出差判定值ddth2以下的期间,按照每个控制周期使计数器值cnt减少“1”。因此,在导出差dd1为第二导出差判定值ddth2以下的状态是暂时的情况下,若导出差dd1大于第一导出差判定值ddth1,则从该时刻重新开始计数器值cnt的增加。其结果是,能够抑制计数器值cnt变成计数器判定值cntth以上延迟的情况。也就是说,能够抑制级联锁止的产生的检知的延迟。
45.接下来,参照图4,对为了导出车轮fl、fr、rl、rr的滑移量slpa而滑移量导出部56所执行的处理例程进行说明。本处理例程按照每个规定的控制周期被反复执行。
46.在本处理例程中,在步骤s21中,进行状态标志flg1是否被设置接通的判定。在状
态标志flg1被设置断开的情况下(s21:否),能够判断为没有检知到级联锁止的产生,因此处理转移至下一步骤s22。在步骤s22中,导出“0”作为车轮fl、fr、rl、rr的滑移量slpa。然后,暂时结束本处理例程。
47.另一方面,在步骤s21中,在状态标志flg1被设置接通的情况下(是),处理转移至下一步骤s23。在步骤s23中,导出从车轮fl、fr、rl、rr的车轮减速度运算值dvw减去前后减速度检测值gx而得到的值作为导出差dd2。接着,在下一步骤s24中,导出滑移量slpa的上次值与导出差dd2之和作为车轮fl、fr、rl、rr的滑移量slpa。即,在检知到级联锁止的产生以后,对车轮减速度运算值dvw与前后减速度检测值gx之差进行累计,导出该累计值作为车轮fl、fr、rl、rr的滑移量slpa。若像这样针对每个车轮fl、fr、rl、rr导出滑移量slpa,则暂时结束本处理例程。
48.此外,图3的(c)中单点划线所示的线l1是基于级联锁止的产生的检知时刻亦即定时t13的车轮fl、fr、rl、rr的车轮速度检测值vw和前后减速度检测值gx的状态量的推移。在将定时t13的车轮fl、fr、rl、rr的车轮速度检测值vw设为第一状态量的情况下,该状态量从第一状态量起以与前后减速度检测值gx相对应的速度减少。而且,该状态量与车轮速度检测值vw之差相当于滑移量slpa。
49.接下来,参照图5,对为了在检知到级联锁止的产生的状况下决定abs控制的开始而abs控制部57所执行的处理例程进行说明。本处理例程以车轮fl、fr、rl、rr为单位被反复执行。此处,以决定针对左前轮fl的abs控制的开始的情况为例进行说明。
50.在本处理例程中,在步骤s31中,进行是否正在对左前轮fl实施abs控制的判定。在正在对左前轮fl实施abs控制的情况下(s31:是),暂时结束本处理例程。另一方面,在没有对左前轮fl实施abs控制的情况下(s31:否),不管是否对左前轮fl以外的其它车轮实施abs控制,处理都转移至下一步骤s32。
51.在步骤s32中,进行状态标志flg1是否被设置接通的判定。在状态标志flg1被设置断开的情况下(s32:否),没有检知到级联锁止的产生,因此暂时结束本处理例程。另一方面,在状态标志flg1被设置接通的情况下(s32:是),检知到级联锁止的产生,因此处理转移至下一步骤s33。
52.在步骤s33中,进行左前轮fl的滑移量slpa是否为滑移量判定值slpath以上的判定。滑移量判定值slpath是用于基于滑移量slpa判断是否开始abs控制的值。在本实施方式中,检知时刻车身速度vs1与系数α之积被设定为滑移量判定值slpath。检知时刻车身速度vs1是级联锁止的产生的检知时刻的估计车身速度vs0。即,在图3所示的例子中,定时t13的估计车身速度vs0成为检知时刻车身速度vs1。作为系数α,设定大于“0”且小于“1”的值。优选地,作为系数α,设定大于“0.1”且小于“0.2”的值。
53.在步骤s33中,在左前轮fl的滑移量slpa小于滑移量判定值slpath的情况下(否),暂时结束本处理例程。即,不开始针对左前轮fl的abs控制。另一方面,在滑移量slpa为滑移量判定值slpath以上的情况下(s33:是),处理转移至下一步骤s34。在步骤s34中,开始针对左前轮fl的abs控制。然后,暂时结束本处理例程。
54.此外,决定针对左前轮fl以外的其它车轮的abs控制的开始的情况的处理的流程与左前轮fl的情况相同,因此省略详细的说明。
55.顺便一提,在没有检知到级联锁止的产生的情况下,以估计车身速度vs0与车轮速
度检测值vw之差亦即滑移量slp变成该判定值以上为契机,开始abs控制。
56.接下来,参照图6,对本实施方式的作用以及效果进行说明。
57.如图6的(a)、(b)、(c)所示,若在车辆制动时产生级联锁止,则在全部的车轮fl、fr、rl、rr中车轮速度检测值vw急剧变小。在这样的情况下,基于车轮速度检测值vw导出的估计车身速度vs0低于实际的车身速度vs。
58.在图6所示的例子中,从定时t21起,从车轮减速度平均值的增大速度ddvwav减去前后减速度检测值的增大速度dgx而得到的值亦即导出差dd1比第一导出差判定值ddth1大。即,判断为是滑移增大状态。然后,在定时t22,判定为滑移增大状态产生了判定时间tmcr以上。其结果是,在本实施方式中,能够在车辆制动时检知级联锁止的产生。
59.于是,在定时t22以后,按照每个规定的控制周期导出车轮减速度运算值dvw与前后减速度检测值gx之差亦即导出差dd2,并且导出导出差dd2的累计值作为滑移量slpa。在车轮fl、fr、rl、rr的减速滑移的程度变大时,车轮速度检测值vw变小,因此滑移量slpa变大。然后,在定时t23,滑移量slpa变成滑移量判定值slpath以上,因此对滑移量slpa变成滑移量判定值slpath以上的车轮实施abs控制。
60.即,在本实施方式中,即使在产生了级联锁止的情况下,也能够导出根据车轮fl、fr、rl、rr的减速滑移的程度而变化的滑移量slpa。在如图6的(c)所示那样产生了级联锁止的情况下,估计车身速度vs0较大地低于实际的车身速度vs,因此即使车轮fl、fr、rl、rr的减速滑移的程度变大,估计车身速度vs0与车轮速度检测值vw之差亦即滑移量slp也不易变大。因此,通过使用滑移量slpa而不是滑移量slp,从而能够适当地推测车轮fl、fr、rl、rr的减速滑移的程度,进而能够开始abs控制。
61.此外,在产生了级联锁止的情况下,估计车身速度vs0与实际的车身速度vs的差异较大。因此,作为决定abs控制的开始定时的判定值,采用滑移量判定值slpath。滑移量判定值slpath与检知时刻车身速度vs1与系数α之积相等。因此,通过设定适当的值作为系数α,能够抑制abs控制的开始延迟、提早开始。
62.顺便一提,若如上述那样开始abs控制,则消除车轮fl、fr、rl、rr的减速滑移,因此消除估计车身速度vs0与实际的车身速度vs的差异。其结果是,车轮fl、fr、rl、rr的滑移量slp的导出精度变高。其结果是,能够基于该滑移量slp,调整车轮fl、fr、rl、rr的制动力。
63.本实施方式能够如以下那样进行变更来实施。本实施方式以及以下的变更例能够在技术上不矛盾的范围内相互组合来实施。
64.·
也可以将与检知时刻车身速度vs1与系数α之积不同的值设定为滑移量判定值slpath。例如,也可以将从检知时刻车身速度vs1减去规定的修正值而得到的值设定为滑移量判定值slpath。
65.·
也可以将滑移量判定值slpath固定为预先设定的规定值。
66.·
也可以在检知到级联锁止的产生的情况下,在滑移量slpa持续增大规定时间以上时,判断为滑移量slpa增大,开始abs控制。
67.·
第二导出差判定值ddth2也可以与第一导出差判定值ddth1相等。
68.·
在上述实施方式中,如图2所示,在车轮减速度平均值的增大速度ddvwav与前后减速度检测值的增大速度dgx之差亦即导出差dd1为第二导出差判定值ddth2以下时,减少计数器值cnt。但是,也可以在导出差dd1为第二导出差判定值ddth2以下时,保持计数器值
cnt。在该情况下,优选在导出差dd1小于第二导出差判定值ddth2的状态持续了规定时间以上的情况下,将计数器值cnt复位为“0”。
69.·
也可以在从导出差dd1大于第一导出差判定值ddth1的时刻到导出差dd1变成第二导出差判定值ddth2以下的时刻为止的期间,按照每个规定的控制周期增加计数器值cnt。另外,也可以在从导出差dd1变成第二导出差判定值ddth2以下的时刻到导出差dd1大于第一导出差判定值ddth1的时刻为止的期间,按照每个规定的控制周期减少计数器值cnt。
70.·
在上述实施方式中,在检知到级联锁止的产生以后,对滑移量slpa增大的车轮fl、fr、rl、rr实施abs控制。但是,在产生了级联锁止的情况下,在全部的车轮fl、fr、rl、rr中产生规定的减速滑移。因此,也可以在检知到级联锁止的产生的定时,对全部的车轮fl、fr、rl、rr开始abs控制。在该情况下,与上述实施方式的情况相比,也可以延长判定时间tmcr,即也可以增大计数器判定值cntth。
71.·
制动控制装置50可以构成为根据计算机程序进行动作的一个以上的处理器、执行各种处理中的至少一部分处理的专用的硬件等一个以上的专用硬件电路或者包含这些组合的电路。作为专用的硬件,例如能够列举出面向特定用途的集成电路亦即asic。处理器包括cpu以及ram、rom等存储器,存储器储存被构成为使cpu执行处理的程序代码或者指令。存储器即存储介质包括能够由通用或专用的计算机访问的所有可利用的介质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1