一种分布式驱动车辆转向稳定性控制系统及其控制方法
1.本发明涉及车辆主动安全领域,具体是一种分布式驱动车辆转向稳定性控制系统及其控制方法。
背景技术:
2.随着全球性的石油危机出现和环境污染问题的日益严重,分布式驱动电动汽车成为了汽车领域研究的重点。在车辆主动安全控制领域,分布式驱动电动汽车也因其车轮可独立驱动/制动,且其转矩在一定范围内可分配的特殊性能,具备了比传统车辆和集中式电动汽车更加可靠、协调和灵活的优势。当前很多横摆角速度
‑
质心侧偏角联合的控制方法都充分利用了分布式驱动电动汽车在车辆主动安全控制中的诸多优点,但是对于横摆角速度和质心侧偏角控制器联合控制时的比例分配问题考虑较少,仅基于车辆状态分配控制比例,未与车辆的稳定性指标建立联系。在质心侧偏角速度足够小但是质心侧偏角足够大以及稳定区域极小的工况下,对车辆稳定域的判断以及车身稳定性的控制不准确,导致其适用性存在问题。
技术实现要素:
3.为了解决现有技术中存在的不足,本申请提出了一种分布式驱动车辆转向稳定性控制系统及其控制方法,基于滑模控制理论,综合了非线性工况下的稳定度指标,考虑了垂直载荷变化下的转矩分配,设计了横摆角速度
‑
质心侧偏角联合的稳定性控制系统,该稳定性控制系统能够在不同工况下对车身的稳定性进行准确的判断,从而合理分配控制比例,提高控制效能。
4.本发明所采用的技术方案如下:
5.一种分布式驱动车辆转向稳定性控制系统,包括整车系统、理想状态模块、稳定性判定模块、β
‑
ω联合控制器、联合系数分配模块和转矩分配模块;
6.所述整车系统接收方向盘转角δ
w
和转矩分配模块反馈的附加横摆力矩t
ij
,整车系统根据输入的车辆运动状态参数输出质心侧偏角β、质心侧偏角速度横摆角速度ω
z
至稳定性判断模块,输出车辆纵向速度v
x
、前轮转角δ
f
和路面附着系数μ至理想状态模块;
7.所述理想状态模块根据所输入的v
x
、δ
f
和μ计算并输出期望横摆角速度ω
exp
和期望质心侧偏角β
exp
至β
‑
ω联合控制器;
8.所述稳定性判定模块基于横摆角速度门限值和稳定度指标判定车辆是否稳定;
9.在车辆处于非稳定状态时,由所述β
‑
ω联合控制器进行滑模控制,输出质心侧偏角控制器的附加横摆力矩δm
β
和横摆角速度控制器的附加横摆力矩δm
ω
;
10.所述联合系数分配模块接收δm
β
和δm
ω
,且联合系数分配模块根据稳定度指标分配控制比例,得到加权附加横摆力矩δm;
11.所述转矩分配模块通过动态载荷分配算法将δm分配到各个车轮上。
12.进一步,所述整车系统由非线性车辆动力学模型表示,所述非线性车辆动力学模
型包括车辆二自由度模型和魔术公式轮胎模型。
13.一种分布式驱动车辆转向稳定性控制方法,包括如下步骤:
14.s1、采集车辆运动状态参数包括方向盘转角δ
w
、车辆纵向速度v
x
、前轮转角δ
f
和路面附着系数μ并得到质心侧偏角β、质心侧偏角速度和ω
z
;
15.s2、基于横摆角速度门限值和稳定度指标,根据β、和ω
z
判定车辆是否稳定;
16.s3、若处于非稳定状态,根据的v
x
、δ
f
和μ计算出期望横摆角速度ω
exp
、期望质心侧偏角β
exp
以及横摆角速度的跟踪误差e
ω
和质心侧偏角的的跟踪误差e
β
,并对车辆进行附加横摆力矩滑模控制,得到的附加横摆力矩δm
β
和δm
ω
;根据稳定度指标s
β
分配控制比例,得到加权附加横摆力矩δm;通过动态载荷分配算法将δm分配到各个车轮上,得到各个轮胎的附加横摆力矩。
17.进一步,车辆失稳判定方法为:
18.s2.1、将v
x
、δ
f
和μ输入非线性车辆动力学模型得到横摆角速度偏差δω、β和
19.s2.2、将β和代入稳定度指标公式中计算得到稳定度指标s
β
;
20.s2.3、若s
β
=0,判定汽车失稳;当s
β
≠0且δω>k时,判定汽车失稳;当s
β
≠0且δω≤k时,判定汽车稳定,继续监测汽车的稳定性,其中,k为横摆角速度门限值。
21.进一步,s2.2中获得稳定度指标公式的方法为:
22.s2.2.1、基于非线性车辆动力学模型得到二阶自治系统,进而构建基于五参数菱形相平面的车辆稳定域边界参数:
[0023][0024]
其中,为横摆角加速度;k
f
为前轴侧偏刚度;k
r
为后轴侧偏刚度;在给定的v
x
、μ和δ
f
下,绘制二阶自治系统的相轨迹,得到相平面图;
[0025]
s2.2.2、基于的二阶自治系统,在纵向车速60~120km/h、附着系数0~1和前轮转角0~10
°
的工况下进行仿真,建立五参数值查表数据库;
[0026]
s2.2.3、得到各个工况下稳定域的边界方程,即稳定度指标公式如下式:
[0027][0028]
其中,是菱形的第i个边界方程,a
i
为第i个边界方程的斜率;b
i
为第i个边界方程的常数;β
i
为第i个边界的β值,i=1,2,3,4。
[0029]
进一步,计算出期望横摆角速度ω
exp
和期望质心侧偏角β
exp
的方法为:
[0030][0031]
其中:g为重力加速度;k为车辆的稳定性因数;l为轴距。
[0032]
进一步,获得附加横摆力矩δm
β
和δm
ω
的方法为:
[0033]
分别计算横摆角速度跟踪误差和质心侧偏角跟踪误差:
[0034][0035]
根据横摆角速度跟踪误差和质心侧偏角跟踪误差对车辆进行附加横摆力矩滑模控制,得到的附加横摆力矩公式为:
[0036][0037]
其中,分别是横摆角速度跟踪误差和质心侧偏角跟踪误差的一阶导数;为期望质心侧偏角加速度;c
ω
为横摆角速度误差及其变化率之间的权重系数,其值大于0;c
β
为质心侧偏角误差及其变化率之间的权重系数,其值大于0;为横摆角加速度;t为时间变量;k
β
、k
ω
分别为质心侧偏角控制器等速趋近律的系数和横摆角速度控制器等速趋近律的系数。
[0038]
进一步,计算加权附加横摆力矩δm和控制比例的方法为:
[0039][0040]
其中,p为控制比例;h为相图上平衡点到车辆状态点的距离。
[0041]
进一步,通过动态载荷分配算法将δm分配到各个车轮的方法为:
[0042]
每个车轮受到的垂直载荷:
[0043]
各轮分配的转矩表示为:
[0044]
其中,f
z_ij
为各轮受到的垂直载荷t
ij
为各轮分配的转矩,i=f、r,f、r分别代表前和后;j=l、r,l、r分别代表左和右;h
g
是车辆质心高度;a
y
为车辆侧向加速度;d为轮距,g为重力加速度;r
w
为车轮的滚动半径。
[0045]
本发明的有益效果:
[0046]
通过本专利提出的方法,分布式驱动车辆可以在不同激烈程度的工况下实现转向稳定性控制。该方法可以根据实际情况判断车辆的稳定性、合理分配β
‑
ω联合控制器的控制比例,β
‑
ω联合控制器的控制效能比单个控制器的更好,在较缓和以及激烈的工况下都能有效追踪理想参数。转矩分配模块也可以根据载荷情况合理分配转矩。控制器整体具有较好的适应性和鲁棒性,可以减轻驾驶员的驾驶负担。
附图说明
[0047]
图1是本申请控制系统框图;
[0048]
图2是本申请稳定性判定流程图;
[0049]
图3是二自由度车辆模型;
[0050]
图4是某工况下的五参数菱形相平面图片。
具体实施方式
[0051]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
[0052]
一种分布式驱动车辆转向稳定性控制系统如图1所示,包括整车系统、理想状态模块、稳定性判定模块、β
‑
ω联合控制器、联合系数分配模块和转矩分配模块;
[0053]
所述整车系统接收方向盘转角δ
w
和转矩分配模块反馈的附加横摆力矩t
ij
,整车系统根据输入的车辆运动状态参数输出质心侧偏角β、质心侧偏角速度横摆角速度ω
z
至稳定性判断模块,输出车辆纵向速度v
x
、前轮转角δ
f
和路面附着系数μ至理想状态模块;
[0054]
所述理想状态模块根据所输入的v
x
、δ
f
和μ计算并输出期望横摆角速度ω
exp
和期望质心侧偏角β
exp
至β
‑
ω联合控制器;
[0055]
所述稳定性判定模块基于横摆角速度门限值和稳定度指标判定车辆是否稳定;
[0056]
在车辆处于非稳定状态时,由所述β
‑
ω联合控制器进行滑模控制,输出质心侧偏角控制器的附加横摆力矩δm
β
和横摆角速度控制器的附加横摆力矩δm
ω
;
[0057]
所述联合系数分配模块接收δm
β
和δm
ω
,且联合系数分配模块根据稳定度指标分配控制比例,得到加权附加横摆力矩δm;
[0058]
所述转矩分配模块通过动态载荷分配算法将δm分配到各个车轮上。
[0059]
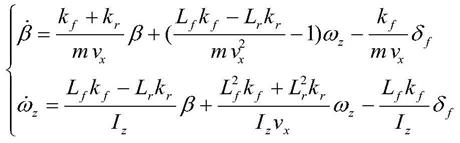
在本实施例中,整车系统由非线性车辆动力学模型表示,非线性车辆动力学模型包括车辆二自由度模型和魔术公式轮胎模型。如图3为车辆二自由度模型表示为:
[0060]
车辆的侧向运动为:
[0061][0062]
车辆的横摆运动为:
[0063][0064]
式中,m为整车质量;v
x
为车辆纵向速度;v
y
为车辆侧向速度,为车辆侧向加速度;ω
z
为横摆角速度,为横摆角加速度;f
yf
为前轮所受侧向力;f
yr
为后轮所受侧向力;δ
f
为前轮转角;i
z
为车辆绕z轴的转动惯量;l
f
为质心到前轴的距离;l
r
为质心到后轴的距离。
[0065]
魔术公式轮胎模型为:
[0066]
f=dsin(carc tan(bx
‑
e(bx
‑
arctan bx)))
ꢀꢀꢀ
(3)
[0067]
式中:f表示侧向力、纵向力或回正力矩;x表示侧偏角或滑移率;d为峰值因子;c为形状因子;b为刚度因子;e为曲率因子。
[0068]
一种分布式驱动车辆转向稳定性控制方法,包括如下步骤:
[0069]
s1、采集车辆运动状态参数并输入整车系统,车辆运动状态参数包括方向盘转角δ
w
、车辆纵向速度v
x
、前轮转角δ
f
和路面附着系数μ;由于整车系统搭载有非线性车辆动力学模型和二阶自治系统,进而由整车系统输出质心侧偏角β、质心侧偏角速度和横摆角速度ω
z
;
[0070]
s2、基于横摆角速度门限值和稳定度指标,根据整车系统输入的β、和ω
z
判定车辆是否稳定;如图2所示具体过程如下:
[0071]
s2.1、根据车辆纵向速度v
x
、前轮转角δ
f
和路面附着系数μ输入非线性车辆动力学模型得到横摆角速度偏差δω、质心侧偏角β和质心侧偏角速度
[0072]
s2.2、将质心侧偏角β和质心侧偏角速度代入稳定度指标公式中计算得到稳定度指标s
β
。稳定度指标公式计算过程如下:
[0073]
s2.2.1、基于式(1)、(2)和(3)得到二阶自治系统,进而构建基于五参数菱形相平面的车辆稳定域边界参数:
[0074][0075]
式中:β为质心侧偏角,为质心侧偏角速度,ω
z
为横摆角速度,为横摆角加速度;k
f
为前轴侧偏刚度;k
r
为后轴侧偏刚度;在给定的纵向速度v
x
、路面附着系数μ和前轮转角δ
f
下,给式(4)赋予不同初始值(β0,ω
z0
),绘制二阶自治系统的相轨迹,得到相平面图。如图4是某工况下五参数菱形相平面图,其中,分别是菱形区域上边界的值
和下边界的值;分别是菱形区域左边界的β值和右边界的β值,β
e
是菱形区域平衡点的β值;
[0076]
s2.2.2、建立稳定度指标数据库。
[0077]
基于式(4)的二阶自治系统,在纵向车速[60,120]km/h,附着系数[0,1]和前轮转角[0,10]
°
的工况下,如表1所示选取步长,进行如图2所示的大量仿真,建立较为完备的五参数值查表数据库。
[0078]
表1三个变量的取值范围和步长
[0079]
变量取值范围步长v
x
(km/h)60
‑
12010μ0.0
‑
1.00.1δ
f
(
°
)0
‑
100.5
[0080]
s2.2.3、得到各个工况下稳定域的边界方程,稳定度指标公式如下式(5)。
[0081][0082]
式中:是菱形的第i个边界方程,a
i
为第i个边界方程的斜率;bi为第i个边界方程的常数,i=1,2,3,4;β
i
为第i个边界的β值,i=1,2,3,4。
[0083]
s2.3、若s
β
=0,判定汽车失稳;当s
β
≠0且δω>k时,判定汽车失稳;当s
β
≠0且δω≤k时,判定汽车稳定,继续监测汽车的稳定性。k为横摆角速度门限值,且横摆角速度门限值k与车辆纵向速度v
x
的关系如下表2所示。
[0084]
表2横摆角速度偏差失稳临界值
[0085][0086]
s3、若处于稳定状态,则β
‑
ω联合控制器不参与工作,不产生附加横摆力矩。若处于非稳定状态,则控制过程为:
[0087]
s3.1、由理想状态模块根据整车系统输入的v
x
、δ
f
和μ计算出期望横摆角速度ω
exp
和期望质心侧偏角β
exp
;具体过程为:
[0088]
考虑到车辆的稳态转向和路面所能承受的最大附着,控制系统期望值模型:
[0089][0090]
式中:k
f
为前轴侧偏刚度;k
r
为后轴侧偏刚度;g=9.8m/s2为重力加速度;k为车辆的稳定性因数;μ为路面附着系数;l为轴距。
[0091]
s3.2、根据横摆角速度ω
z
和质心侧偏角β的期望值,β
‑
ω联合控制器对车辆进行附加横摆力矩滑模控制,得到的附加横摆力矩δm
β
和δm
ω
;具体过程为:
[0092]
分别计算横摆角速度跟踪误差和质心侧偏角跟踪误差:
[0093][0094]
根据横摆角速度跟踪误差和质心侧偏角跟踪误差对车辆进行附加横摆力矩滑模控制,得到的附加横摆力矩公式为:
[0095][0096]
式中:δm
β
为质心侧偏角控制器的附加横摆力矩;δm
ω
为横摆角速度控制器的附加横摆力矩;分别是横摆角速度跟踪误差和质心侧偏角跟踪误差的一阶导数;为期望质心侧偏角加速度;c
ω
为横摆角速度误差及其变化率之间的权重系数,其值大于0;c
β
为质心侧偏角误差及其变化率之间的权重系数,其值大于0;为横摆角加速度;t为时间变量;k
β
、k
ω
分别为质心侧偏角控制器等速趋近律的系数和横摆角速度控制器等速趋近律的系数。
[0097]
s3.3、联合系数分配模块根据稳定度指标s
β
分配控制比例,得到加权附加横摆力矩δm;其中,控制比例分配公式和加权附加横摆力矩公式为:
[0098][0099]
式中:p为控制比例;h为相图上平衡点到车辆状态点的距离。
[0100]
s3.4、转矩分配模块通过动态载荷分配算法将δm分配到各个车轮上。具体过程为:
[0101]
当车辆处于失稳状态时,车辆的垂直载荷会出现转移,每个车轮受到的垂直载荷:
[0102][0103]
式中:f
z_ij
(i=f、r;j=l、r)为各轮受到的垂直载荷,如f
z_fl
为左前轮受到的垂直载荷;h
g
是车辆质心高度;a
y
为车辆侧向加速度;d为轮距,g为重力加速度,取值为9.8m/s2。
[0104]
根据s3.3得到的附加横摆力矩,分配到各个轮毂电机上:
[0105][0106]
式中:t
ij
(i:f、r;j:l、r)为各轮分配的转矩,如t
fl
为左前轮的转矩;r
w
为车轮的滚动半径。
[0107]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1