相对位置取得系统的故障判定装置及故障判定方法与流程
1.本发明涉及判定相对位置取得系统的故障的故障判定装置等。
背景技术:
2.以往,作为非接触充电系统的故障判定装置,已知有专利文献1所记载的装置。在该故障判定装置中,在供电站处自己诊断供电站自身的故障。具体而言,判定供电站处的车辆检测传感器的故障、以及送电线圈的断线等。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2016
‑
32397号公报
技术实现要素:
6.发明要解决的课题
7.在电动式的车辆执行非接触充电的情况下,电动车辆必须移动到非接触充电系统,并一边使车辆的受电单元相对于非接触充电系统的内置送电线圈的送电单元进行对位一边驻车。在实现这样的驻车的情况下,需要使用精度良好地取得送电单元与受电单元的相对位置的相对位置取得系统。与此相对,在以往的故障判定装置中,难以判定这样的相对位置取得系统的故障,希望能够精度良好地判定相对位置取得系统的故障的故障判定装置。
8.本发明是为了解决上述课题而做出的,其目的在于提供能够精度良好地判定相对位置取得系统的故障的相对位置取得系统的故障判定装置等。
9.用于解决课题的方案
10.为了达到上述目的,技术方案1的发明涉及一种相对位置取得系统1的故障判定装置,其特征在于,相对位置取得系统1具备:受电单元20,其搭载于车辆2;送电单元31,其用于对受电单元20以非接触方式进行送电;第一天线(车辆侧天线24),其设置于受电单元20;第一无线通信部(车辆侧无线通信装置23),其经由第一天线而执行无线信号的收发;m个第二天线(第一送电侧天线41~第四送电侧天线44),它们设置于送电单元31,该m为3以上的整数;第二无线通信部(送电侧无线通信装置33),其经由m个第二天线及第一天线而与第一无线通信部之间执行无线信号的收发;以及相对位置取得部(ecu10),其在从第一无线通信部发送的无线信号经由m个第二天线而由第二无线通信部接收到时,基于经由m个第二天线而分别接收到的无线信号的m个接收结果(第一接收强度lp1~第四接收强度lp4),来取得受电单元20与送电单元31之间的相对位置,所述相对位置取得系统1的故障判定装置具备:相关关系存储部(ecu10),其预先存储m个第二天线中的无线信号的m个接收结果的相关关系[式(1)~(8)];实际相关关系取得部(ecu10、步骤3),其取得由第二无线通信部接收到的无线信号的m个接收结果的实际的相关关系;以及故障判定部(ecu10、步骤4~6),其基于存储于相关关系存储部的m个接收结果的相关关系与由实际相关关系取得部取得的m个接收
结果的实际的相关关系之间的比较结果,来判定相对位置取得系统1的故障。
[0011]
在该相对位置取得系统中,在从第一无线通信部发送的无线信号经由m个第二天线而由第二无线通信部接收到时,基于经由m个第二天线而分别接收到的无线信号的m个接收结果,来取得受电单元与送电单元之间的相对位置。并且,根据相对位置取得系统的故障判定装置,由相关关系存储部预先存储m个第二天线中的无线信号的m个接收结果的相关关系,由实际相关关系取得部取得由第二无线通信部接收到的无线信号的m个接收结果的实际的相关关系。
[0012]
并且,基于存储于相关关系存储部的m个接收结果的相关关系与由实际相关关系取得部取得的m个接收结果的实际的相关关系之间的比较结果,来判定相对位置取得系统的故障。这样,能够一边利用在相对位置的取得中使用的无线信号的m个接收结果的相关关系,一边判定相对位置取得系统的故障,由此能够精度良好地执行故障判定。
[0013]
技术方案2的发明以技术方案1所记载的相对位置取得系统1的故障判定装置为基础,其特征在于,所述相对位置取得系统1的故障判定装置还具备报告部(ecu10、输出接口25、步骤7),该报告部在由故障判定部判定为相对位置取得系统1有故障的情况下,向车辆2的室内报告相对位置取得系统1的故障。
[0014]
根据该相对位置取得系统的故障判定装置,在由故障判定部判定为相对位置取得系统有故障的情况下,向车辆的室内报告相对位置取得系统的故障,因此车辆的驾驶员能够准确无误地识别相对位置取得系统的故障。
[0015]
技术方案3的发明以技术方案1或2所记载的相对位置取得系统1的故障判定装置为基础,其特征在于,送电单元31具有m边形的俯视形状,m个第二天线(第一送电侧天线41~第四送电侧天线44)分别配置于m边形的顶点附近。
[0016]
根据该相对位置取得系统的故障判定装置,送电单元具有m边形的俯视形状,m个第二天线分别配置于m边形的顶点附近,因此能够适当地确保m个第二天线中的相邻的2个第二天线之间的距离。由此,在利用实际相关关系取得部来取得由第二无线通信部接收到的无线信号的m个接收结果的实际的相关关系时,能够提高其取得精度。
[0017]
为了达到前述的目的,技术方案4的发明涉及一种相对位置取得系统1的故障判定方法,其特征在于,所述相对位置取得系统1具备:受电单元20,其搭载于车辆2;送电单元31,其用于对受电单元20以非接触方式进行送电;第一天线(车辆侧天线24),其设置于受电单元20;第一无线通信部(车辆侧无线通信装置23),其经由第一天线而执行无线信号的收发;m个第二天线(第一送电侧天线41~第四送电侧天线44),它们设置于送电单元31,该m为3以上的整数;第二无线通信部(送电侧无线通信装置33),其经由m个第二天线及第一天线而与第一无线通信部之间执行无线信号的收发;以及相对位置取得部(ecu10),其在从第一无线通信部发送的无线信号经由m个第二天线而由第二无线通信部接收到时,基于经由m个第二天线而分别接收到的无线信号的m个接收结果(第一接收强度lp1~第四接收强度lp4),来取得受电单元20与送电单元31之间的相对位置,所述相对位置取得系统1的故障判定方法进行如下处理:将m个第二天线中的无线信号的m个接收结果的相关关系预先存储于相关关系存储部(ecu10);利用实际相关关系取得部(ecu10)取得由第二无线通信部接收到的无线信号的m个接收结果的实际的相关关系(步骤3);以及基于存储于相关关系存储部的m个接收结果的相关关系与由实际相关关系取得部取得的m个接收结果的实际的相关关系
之间的比较结果,来判定相对位置取得系统1的故障(步骤4~6)。
附图说明
[0018]
图1是示意性地表示适用了本发明的一实施方式的故障判定装置的相对位置取得系统的结构的图。
[0019]
图2是表示相对位置取得系统的送电装置的结构的框图。
[0020]
图3是表示相对位置取得系统的车辆侧的结构的框图。
[0021]
图4是表示第一送电侧天线~第四送电侧天线及受电侧天线的配置的俯视图。
[0022]
图5是表示4个接收强度与4个天线间距离之间的关系的映射。
[0023]
图6是表示第一送电侧天线~第四送电侧天线正常时的第一接收强度~第四接收强度的关系的图。
[0024]
图7是表示第四送电侧天线故障时的第一接收强度~第四接收强度的关系的图。
[0025]
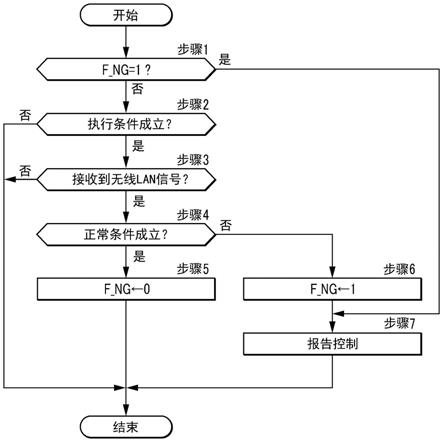
图8是表示故障判定处理的流程图。
[0026]
附图标记说明:
[0027]
1 相对位置取得系统、故障判定装置
[0028]
2 车辆
[0029]
10 ecu(相对位置取得部、相关关系存储部、实际相关关系取得部、故障判定部、报告部)
[0030]
20 受电单元
[0031]
23 车辆侧无线通信装置(第一无线通信部)
[0032]
24 车辆侧天线(第一天线)
[0033]
25 输出接口(报告部)
[0034]
31 送电单元
[0035]
33 送电侧无线通信装置(第二无线通信部)
[0036]
41 第一送电侧天线(第二天线)
[0037]
42 第二送电侧天线(第二天线)
[0038]
43 第三送电侧天线(第二天线)
[0039]
44 第四送电侧天线(第二天线)
[0040]
lp1 第一接收强度(接收结果)
[0041]
lp2 第二接收强度(接收结果)
[0042]
lp3 第三接收强度(接收结果)
[0043]
lp4 第四接收强度(接收结果)。
具体实施方式
[0044]
以下,参照图1~4来说明本发明的一实施方式的相对位置取得系统的故障判定装置。需要说明的是,本实施方式的相对位置取得系统1也兼用作故障判定装置,因此以下,关于相对位置取得系统1进行说明,并且其中,也关于故障判定装置的功能及结构进行说明。另外,在以下的说明中,为了便于说明,将图4的左侧称作“前”,将右侧称作“后”,将上侧称作“右”,将下侧称作“左”。
[0045]
该相对位置取得系统1是根据以下所述的理由而取得车辆2的受电单元20与送电装置3的送电单元31之间的相对位置的系统。
[0046]
首先,车辆2是具有4个车轮2a(仅2个图示出)的四轮车辆,且是仅将未图示的电动机作为动力源的电动车辆类型的车辆。在这样的电动车辆的情况下,在蓄电池22(参照图3)的充电率soc降低了时,需要执行充电,该车辆2构成为以非接触方式(后述的磁共振方式)执行向蓄电池22的充电。
[0047]
在执行这样的非接触充电时,需要一边以使车辆2的受电单元20成为相对于送电装置3的送电单元31能够充电的位置关系(参照图1)的方式进行对位一边驻车,在该车辆2的情况下,为了提高由驾驶员进行的驻车动作的容易性,执行未图示的驻车支援控制处理。
[0048]
在该驻车支援控制处理中,出于根据前述的受电单元20与送电单元31之间的相对位置(以下简称作“相对位置”)来对车辆2的动力马达及制动装置(均未图示)等进行控制的关系,需要精度良好地取得该相对位置。根据以上的理由,在该相对位置取得系统1中,取得相对位置。
[0049]
相对位置取得系统1具备送电装置3,该送电装置3构成非接触充电系统的一部分。该送电装置3如图2所示,具备控制器30、送电单元31、送电电路32、送电侧无线通信装置33及第一送电侧天线41~第四送电侧天线44。送电单元31内置有送电线圈(未图示),且配置于驻车空间的路面上,并且具备俯视为矩形的形状(参照图4)。
[0050]
送电电路32具备交流电源装置、转换器及逆变器(均未图示),用于从送电单元31的送电线圈(未图示)对受电单元20的受电线圈(未图示)通过磁共振方式执行送电动作。
[0051]
送电侧无线通信装置33在与后述的车辆侧无线通信装置23之间执行无线通信,如后所述,经由第一送电侧天线41~第四送电侧天线44而收发无线信号。需要说明的是,在本实施方式中,送电侧无线通信装置33相当于第二无线通信部,第一送电侧天线41~第四送电侧天线44相当于第二天线。
[0052]
第一送电侧天线41~第四送电侧天线44以配置于送电单元31的四角的状态内置于送电单元31。如图4所示,第一~第二送电侧天线41~42在送电单元31的前侧的右端部及左端部分别设置,且相对于送电单元31的前后方向的中心线而互为线对称地配置。
[0053]
另一方面,第三~第四送电侧天线43~44在送电单元31的后侧的右端部及左端部分别设置,且相对于送电单元31的前后方向的中心线而互为线对称地配置。而且,第一及第三送电侧天线41、43彼此在前后方向上同心地配置,第二及第四送电侧天线42、44也彼此在前后方向上同心地配置。
[0054]
该送电侧无线通信装置33具备执行基于无线lan方式的无线通信的无线lan通信电路(未图示)和执行基于长波(lf)的无线通信的长波通信电路(未图示)。需要说明的是,在以下的说明中,将基于无线lan方式的无线通信称作“无线lan通信”,将基于长波的无线通信称作“长波通信”。在该送电侧无线通信装置33中,由ecu10如后所述那样控制与无线通信装置23之间的无线lan通信及长波通信。
[0055]
另外,控制器30由微型计算机构成,该微型计算机由cpu、ram、rom及i/o接口电路(均未图示)等构成。控制器30控制由送电电路32进行的送电动作,并且控制由送电侧无线通信装置33进行的无线通信。
[0056]
另一方面,如图3所示,在车辆2设置有ecu10、受电单元20、受电电路21、蓄电池22、
车辆侧无线通信装置23、车辆侧天线24及输出接口25。该ecu10由微型计算机构成,该微型计算机由cpu、ram、rom及i/o接口电路(均未图示)等构成。
[0057]
另外,受电单元20以其中心与车辆中心线(参照图4)一致的方式配置,且设置于车辆2的底面,并且与受电电路21电连接。
[0058]
该受电电路21由电容器及整流电路等构成,且与ecu10电连接。ecu10在非接触充电的执行时,通过控制受电电路21,来将从送电单元31的送电线圈送到受电单元20的受电线圈的电力充入蓄电池22。
[0059]
而且,车辆侧无线通信装置23与ecu10电连接,且与前述的送电侧无线通信装置33同样地,具备执行无线lan通信的通信电路和执行长波通信的通信电路。
[0060]
在该车辆侧无线通信装置23中,通过由ecu10进行控制,从而经由车辆侧天线24而与送电侧无线通信装置33之间执行无线lan通信及长波通信。需要说明的是,在本实施方式中,车辆侧无线通信装置23相当于第一无线通信部,车辆侧天线24相当于第一天线。
[0061]
在该情况下,车辆侧无线通信装置23的ssid及口令预先存储于送电装置3的控制器30内,伴随车辆2的移动,在车辆2与受电单元20之间的位置关系处于规定范围内的情况下,车辆侧无线通信装置23与送电侧无线通信装置33之间的配对自动地开始。由此,能够进行车辆侧无线通信装置23与送电侧无线通信装置33之间的无线lan通信。
[0062]
另一方面,车辆侧天线24以使其中心与车辆中心线一致的方式配置,且内置于送电单元31的前端部。
[0063]
而且,输出接口25由扬声器及显示器等构成,且与ecu10电连接。该扬声器通过由ecu10控制,来将各种声音信号向车内输出。另外,显示器设置于仪表板(未图示),且由ecu10控制,由此显示各种显示信息。需要说明的是,在本实施方式中,输出接口25相当于报告部。
[0064]
ecu10基于rom内的控制程序,来控制以上的车辆侧无线通信装置23及输出接口25等,由此执行相对位置算出处理(未图示)及后述的故障判定控制处理等各种控制处理。需要说明的是,在本实施方式中,ecu10相当于相对位置取得部、相关关系存储部、实际相关关系取得部、故障判定部及报告部。
[0065]
接着,说明本实施方式的相对位置取得系统1中的相对位置的取得方法和相对位置取得系统1的故障的判定方法。最先说明相对位置的取得方法。
[0066]
在取得相对位置的情况下,首先,长波信号从车辆侧无线通信装置23经由车辆侧天线24向送电单元31侧发送。并且,送电侧无线通信装置33在经由第一送电侧天线41~第四送电侧天线44而接收到长波信号的情况下,取得第一送电侧天线41~第四送电侧天线44中的长波信号的接收强度lp。
[0067]
在以下的说明中,将第一送电侧天线41中的长波信号的接收强度称作“第一接收强度lp1”,将第二送电侧天线42中的长波信号的接收强度称作“第二接收强度lp2”。而且,将第三送电侧天线43中的长波信号的接收强度称作“第三接收强度lp3”,将第四送电侧天线44中的长波信号的接收强度称作“第四接收强度lp4”。
[0068]
接下来,送电侧无线通信装置33将包含以上的第一接收强度lp1~第四接收强度lp4的数据在内的无线lan信号经由第一送电侧天线41~第四送电侧天线44而向车辆侧无线通信装置23发送。
[0069]
然后,在由车辆侧无线通信装置23接收到包含以上的第一接收强度lp1~第四接收强度lp4的数据在内的无线lan信号的情况下,ecu10基于上述第一接收强度lp1~第四接收强度lp4,通过以下所述的算出方法,算出(取得)相对距离。
[0070]
首先,如图4所示,在车辆2的中心线与送电单元31的中心线一致的状态下,起因于前述的车辆侧天线24及前述的第一送电侧天线41~第四送电侧天线44的配置,从而第一送电侧天线41与车辆侧天线24之间的距离(以下称作“第一天线间距离”)、和第二送电侧天线42与车辆侧天线24之间的距离(以下称作“第二天线间距离”)相同。由此,在第一接收强度lp1和第二接收强度lp2中,lp1≈lp2成立。
[0071]
此外,第三送电侧天线43与车辆侧天线24之间的距离(以下称作“第三天线间距离”)、和第四送电侧天线44与车辆侧天线24之间的距离(以下称作“第四天线间距离”)相同。由此,在第三接收强度lp3和第四接收强度lp4中,lp3≈lp4成立。而且,车辆2与送电单元31之间的距离越短,则4个接收强度lp1~lp4成为越强的状态。
[0072]
根据以上的理由,在车辆2的中心线与送电单元31的中心线一致的状态下,在4个接收强度lp1~lp4与4个天线间距离之间,图5的映射所示的相关关系成立。
[0073]
因此,在ecu10中,首先,根据第一接收强度lp1~第四接收强度lp4,来检索图5的映射,由此算出第一天线间距离~第四天线间距离。并且,基于第一天线间距离与第二天线间距离的偏差、以及第三天线间距离与第四天线间距离的偏差,通过规定推定方法来推定车辆2的中心线与送电单元31的中心线之间的角度(俯视车辆2时的角度)。然后,基于该推定出的角度及第一天线间距离~第四天线间距离,通过规定的算出方法(例如映射检索方法或规定的运算式)来算出相对位置。
[0074]
接着,说明相对位置取得系统1的故障判定方法。该故障判定方法以车辆侧天线24、车辆侧无线通信装置23及送电侧无线通信装置33正常工作着为前提,判定4个送电侧天线41~44是否正常工作着。
[0075]
首先,起因于驻车空间中的送电单元31的配置,构成为车辆2相对于送电单元31仅通过前进行驶才能够接近,设想第一送电侧天线41~第四送电侧天线44均正常工作着、并且车辆2朝向送电单元31行驶着的条件。
[0076]
在这样的条件下,即便在车辆2的中心线相对于送电单元31的中心线倾斜了的情况下,根据前述的4个天线41~44的配置,在第一接收强度lp1~第四接收强度lp4中,以下的式(1)~(8)也均成立。
[0077]
dlp1>0
……
(1)
[0078]
dlp2>0
……
(2)
[0079]
dlp3>0
……
(3)
[0080]
dlp4>0
……
(4)
[0081]
lp3>lp1
……
(5)
[0082]
lp4>lp2
……
(6)
[0083]
|lp1
‑
lp2|<dref1
……
(7)
[0084]
|lp3
‑
lp4|<dref2
……
(8)
[0085]
上式(1)的dlp1表示第一接收强度lp1的每单位时间的变动量(即此次值与上次值的偏差),这点对于式(2)~(4)的dlp2~dlp4也同样。另外,式(7)~(8)的dref1、dref2为规
定的判定值,通过根据相对位置及车辆2的中心线与送电单元31的中心线之间的角度而检索未图示的映射来设定。作为该情况下的相对位置及角度,使用在上次的故障判定的时机判定为相对位置取得系统1正常时取得的值。
[0086]
因此,在以上的式(1)~(8)中的至少1个不成立的情况下,能够推定为第一送电侧天线41~第四送电侧天线44中的至少1个有故障,能够判定为相对位置取得系统1有故障。
[0087]
例如,在车辆2和送电单元31处于图4所示的位置关系的情况下,在4个天线41~44正常工作着时,在以上的式(1)~(8)成立的同时,lp1≈lp2及lp3≈lp4成立,由此第一接收强度lp1~第四接收强度lp4成为图6所示那样的相对关系。
[0088]
另一方面,例如,如图7所示,在由于第四送电侧天线44有故障而上述式(6)等不成立的情况下,判定为相对位置取得系统1有故障。
[0089]
而且,例如尽管车辆2处于行驶中,在dlp1=0成立时,第一送电侧天线41有故障,由此判定为相对位置取得系统1有故障。在本实施方式的情况下,通过以上的方法来判定相对位置取得系统1的故障。
[0090]
接着,参照图8来说明相对位置取得系统1的故障判定处理。该故障判定处理通过前述的判定方法来判定相对位置取得系统1有无故障,并由ecu10以规定的控制周期执行。需要说明的是,在以下的说明中算出/设定的各种值存储于ecu10的ram内。
[0091]
如该图所示,首先,判定存储于ram的故障标志f_ng是否为“1”(图8/步骤1)。该故障标志f_ng表示相对位置取得系统1有无故障,其初始值被设定为“0”。
[0092]
在该判定为肯定(图8/步骤1
…
是)而在上次以前的控制时机判定为相对位置取得系统1有故障时,进入后述的步骤7。
[0093]
另一方面,在该判定为否定(图8/步骤1
…
否)时,判定相对位置取得系统1的故障判定的执行条件是否成立(图8/步骤2)。
[0094]
在该情况下,在以下的条件(f1)~(f3)均成立时,判定为相对位置取得系统1的故障判定的执行条件成立,在除此以外时,判定为故障判定的执行条件不成立。
[0095]
(f1)车辆侧天线24、车辆侧无线通信装置23及送电侧无线通信装置33均正常工作着。
[0096]
(f2)车辆2处于行驶中。
[0097]
(f3)在此次的控制时机之前从车辆侧无线通信装置23向送电侧无线通信装置33已发送长波信号。
[0098]
在该判定为否定(图8/步骤2
…
否)而故障判定的执行条件不成立时,直接结束本处理。
[0099]
另一方面,在该判定为肯定(图8/步骤2
…
是)而故障判定的执行条件成立时,判定车辆侧无线通信装置23是否接收到来自送电侧无线通信装置33的无线lan信号(图8/步骤3)。该无线lan信号如前述那样,包含第一接收强度lp1~第四接收强度lp4的数据。
[0100]
在该判定为否定(图8/步骤3
…
否)而车辆侧无线通信装置23未接收到无线lan信号时,直接结束本处理。另一方面,在该判定为肯定(图8/步骤3
…
是)而接收到无线lan信号时,判定正常条件是否成立(图8/步骤4)。
[0101]
该正常条件是表示相对位置取得系统1正常的条件,具体而言,在前述的式(1)~(8)均成立时,判定为正常条件成立,在除此以外时,判定为正常条件不成立。
[0102]
在上述的判定为肯定(图8/步骤4
…
是)而正常条件成立时,为了表示相对位置取得系统1正常,将故障标志f_ng设定为“0”(图8/步骤5),结束本处理。
[0103]
另一方面,在上述的判定为否定(图8/步骤4
…
否)而正常条件不成立时,为了表示相对位置取得系统1有故障,将故障标志f_ng设定为“1”(图8/步骤6)。
[0104]
在像这样将故障标志f_ng设定为“1”时、或者在上次以前的控制时机判定为相对位置取得系统1有故障时(图8/步骤1
…
是),执行报告控制处理(图8/步骤7)。
[0105]
在该报告控制处理中,仅在初次的执行时,从输出接口25的扬声器向车室内输出表示相对位置取得系统有故障的声音信号,与此同时,表示其的记号及文字显示于输出接口25的显示器。在如以上那样执行报告控制处理之后,结束本处理。
[0106]
在图8的故障判定处理中,如以上那样判定相对位置取得系统1的故障。在该情况下,在本实施方式中,如前述那样判定式(1)~(8)是否均成立,这相当于将存储于相关关系存储部的m个接收结果的相关关系与由实际相关关系取得部取得的m个接收结果的实际的相关关系进行比较,判定式(1)~(8)是否成立的处理包含于ecu10的rom内的控制程序,这相当于m个接收结果的相关关系存储于相关关系存储部。
[0107]
如以上那样,根据本实施方式的相对位置取得系统1,在从车辆侧无线通信装置23发送的长波信号被4个送电侧天线41~44接收了的情况下,取得这些天线的4个接收强度lp1~lp4,基于这些接收强度lp1~lp4,取得受电单元20与送电单元31之间的相对位置。
[0108]
并且,在ecu10中,在4个接收强度lp1~lp4中,基于前述的式(1)~(8)是否均成立,来判定相对位置取得系统1的故障。这样,能够一边利用在相对位置的取得中使用的长波信号的4个接收强度lp1~lp4的相关关系,一边精度良好地执行相对位置取得系统1的故障判定。
[0109]
而且,送电单元31具有矩形的俯视形状,且4个送电侧天线41~44分别配置于矩形的顶点附近,因此能够适当地确保4个送电侧天线41~44中的相邻的2个天线之间的距离。由此,在取得4个接收强度lp1~lp4来判定前述的式(1)~(8)是否成立时,能够提高其判定精度。
[0110]
而且,在判定为相对位置取得系统1有故障的情况下,经由输出接口25而将相对位置取得系统1的故障向车辆2的室内报告,因此车辆2的驾驶员能够准确无误地识别相对位置取得系统1的故障。
[0111]
需要说明的是,实施方式是使用了俯视矩形的送电单元31的例子,但也可以代替于此,作为送电单元而使用俯视三角形的送电单元,或者俯视五边形以上的多边形的送电单元。在该情况下,作为m个第二天线,将3个或5个以上的送电侧天线配置于送电单元的多边形的顶点附近即可。
[0112]
另外,在实施方式中,举出作为车辆2而使用仅将电动机作为动力源的电动车辆类型的例子,但也可以代替于此,使用将电动机及内燃机作为动力源的混合动力车辆类型的车辆。
[0113]
而且,实施方式是构成为将长波信号经由1个车辆侧天线24向送电侧无线通信装置33发送的例子,但也可以代替于此,构成为将长波信号经由多个车辆侧天线24向送电侧无线通信装置33发送。在该情况下,也基于送电侧无线通信装置33中的4个天线的接收强度的值来执行相对位置取得系统1的故障判定即可。
[0114]
另一方面,在实施方式中,举出作为从车辆侧无线通信装置23向送电侧无线通信装置33发送的无线信号而使用了长波信号的例子,但也可以代替于此,使用超长波信号或中波信号。
[0115]
另外,在实施方式中,举出作为从送电侧无线通信装置33向车辆侧无线通信装置23发送的无线信号而使用了无线lan信号的例子,但也可以代替于此,使用超短波信号或微波信号等。
[0116]
而且,在实施方式中,举出通过判定前述的式(1)~(8)是否均成立,来判定相对位置取得系统的故障的例子,但本发明的故障判定方法不限定于此,基于存储于相关关系存储部的m个接收结果的相关关系与由实际相关关系取得部取得的m个接收结果的实际的相关关系之间的比较结果来判定相对位置取得系统的故障即可。
[0117]
例如,也可以构成为,制作预先定义了相对位置取得系统1正常的情况及有故障的情况下的第一接收强度lp1~第四接收强度lp4的相关关系的映射,将其存储于ecu10的rom内,并且根据实际的第一接收强度lp1~第四接收强度lp4来检索该映射,由此判定相对位置取得系统1的故障。
[0118]
另外,在实施方式中,举出构成为在ecu10中执行相对位置取得系统1的故障判定的例子,但也可以代替于此而构成为在送电装置3的控制器30中执行相对位置取得系统1的故障判定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1