车辆及其控制装置的制作方法
1.本发明涉及车辆及其控制装置。
背景技术:
2.已知有通过与前方车辆进行电子连结而使后续车辆自动地跟随前方车辆的技术。在专利文献1中,将后续车辆控制为将与前方车辆的最接近距离维持为预先设定的距离。在专利文献2中,基于后续车辆的性能而对前方车辆的运动状态进行限制。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2019
‑
1227号公报
6.专利文献2:日本特开2019
‑
156197号公报
技术实现要素:
7.发明所要解决的问题
8.电子连结的两台车辆为了不被其他车辆插入而维持较短的车间距离。若两台车辆在维持较短的车间距离的状态下停止,则存在前方车辆的货舱的使用变得困难的情况。本发明的一个方面的目的在于使跟随行驶中的后续车辆停止在适当的位置。
9.用于解决问题的手段
10.根据一部分的实施方式,提供一种控制装置,其是车辆的控制装置,其中,所述控制装置具备:行驶控制部,其基于从前方车辆接收到的信息,将所述车辆的行驶控制为跟随所述前方车辆;以及距离决定部,其基于与所述前方车辆的货物空间相关的信息来决定停止时的所述车辆与所述前方车辆之间的车间距离,所述行驶控制部在所述前方车辆停止时以形成由所述距离决定部决定的车间距离的方式使所述车辆停止。
11.根据另一实施方式,提供一种控制装置,其是车辆的控制装置,其中,所述控制装置具备:提供部,其将后续车辆为了跟随所述车辆而使用的信息提供给所述后续车辆;距离决定部,其基于与所述车辆的货物空间相关的信息来决定停止时的所述车辆与所述后续车辆之间的车间距离;以及通知部,其将由所述距离决定部决定的车间距离通知给所述后续车辆。
12.发明效果
13.通过上述手段,能够使跟随行驶中的后续车辆停止在适当的位置。
附图说明
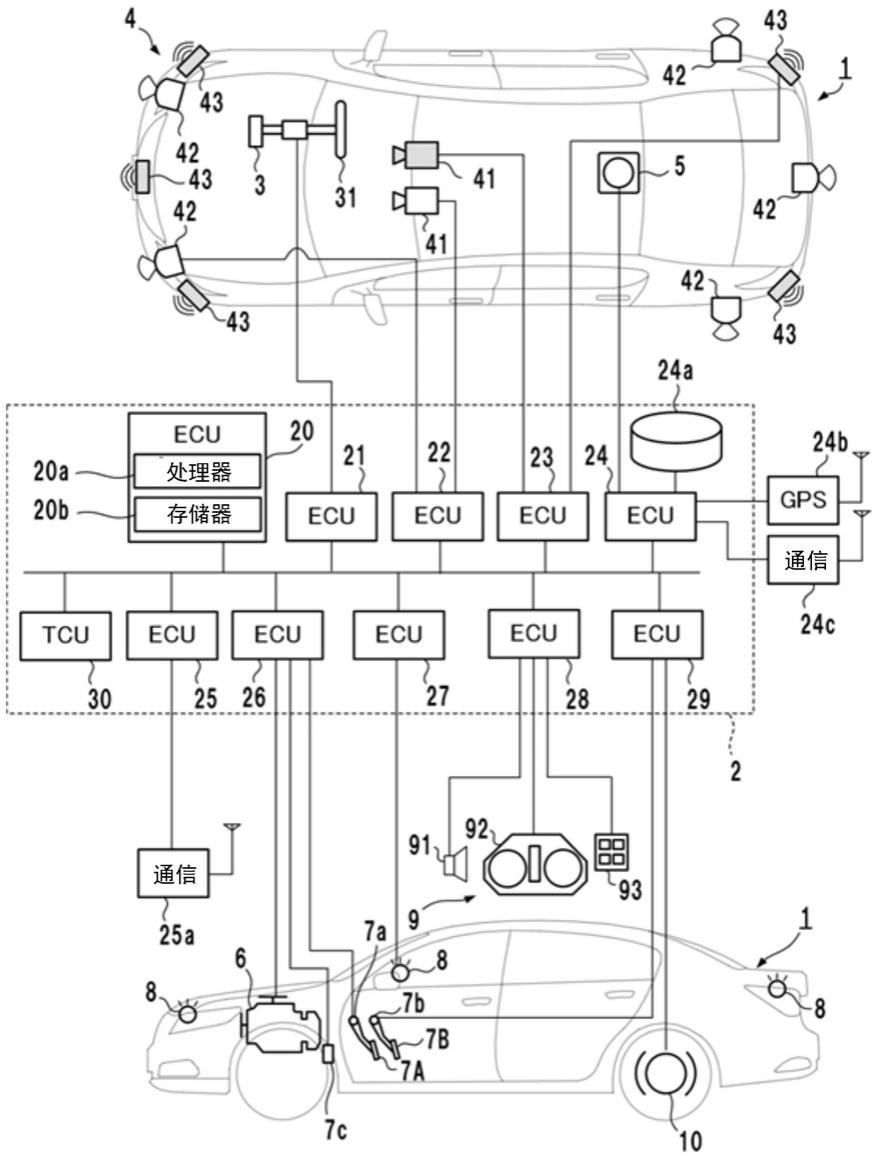
14.图1是对各种实施方式所涉及的车辆的构成例进行说明的框图。
15.图2是对各种实施方式所涉及的电子连结行驶系统的构成例进行说明的框图。
16.图3是对卡车的构成例进行说明的示意图。
17.图4a~图4d是对各种实施方式所涉及的适当的停止位置进行说明的示意图。
18.图5是对第一实施方式所涉及的后续车辆的控制装置的动作例进行说明的流程图。
19.图6是对第一实施方式所涉及的前方车辆的控制装置的动作例进行说明的流程图。
20.图7是对第二实施方式所涉及的后续车辆的控制装置的动作例进行说明的流程图。
21.图8是对第二实施方式所涉及的前方车辆的控制装置的动作例进行说明的流程图。
22.附图标记说明
23.1:车辆;2:控制装置;200:前方车辆;250:后续车辆。
具体实施方式
24.以下,参照附图对实施方式进行详细说明。此外,以下的实施方式并非对权利要求书所涉及的发明进行限定,另外,在实施方式中说明的特征的组合未必全部都是发明所必须的。也可以对实施方式中说明的多个特征中的两个以上的特征任意地进行组合。另外,对相同或者同样的构成标注相同的附图标记,并省略重复的说明。
25.图1是本发明的各种实施方式所涉及的车辆1的框图。在图1中,以俯视图和侧视图示出了车辆1的概要。作为一个例子,车辆1是轿车型的四轮乘用车。车辆1可以是这样的四轮车辆,也可以是两轮车辆、其他类型的车辆。
26.车辆1包括对车辆1进行控制的车辆用控制装置2(以下,简称为控制装置2)。控制装置2包括通过车内网络而连接为可通信的多个ecu20~ecu29。各ecu包括以cpu为代表的处理器、半导体存储器等存储器、以及与外部设备的接口等。在存储器中存储有处理器所执行的程序、处理器在处理中使用的数据等。各ecu可以具备多个处理器、存储器以及接口等。例如,ecu20具备处理器20a和存储器20b。通过由处理器20a执行存储在存储器20b中的程序所包含的命令,由此执行ecu20所进行的处理。取而代之地,ecu20也可以具备用于执行ecu20所进行的处理的asic等专用的集成电路。对于其他ecu而言也是同样的。
27.以下,对各ecu20~ecu29所负责的功能等进行说明。此外,关于ecu的数量、所负责的功能,可以进行适当设计,也可以比本实施方式更细化或者整合。
28.ecu20执行与车辆1的自动驾驶相关的控制。在自动驾驶中,对车辆1的转向、速度中的至少任一方进行自动控制。
29.ecu21对电动动力转向装置3进行控制。电动动力转向装置3包括根据驾驶员对方向盘31的驾驶操作(转向操作)而使前轮转向的机构。另外,电动动力转向装置3包括发挥用于辅助转向操作或者使前轮自动转向的驱动力的马达、对转向角进行检测的传感器等。在车辆1的驾驶状态为自动驾驶的情况下,ecu21根据来自ecu20的指示而对电动动力转向装置3进行自动控制,并对车辆1的行进方向进行控制。
30.ecu22以及ecu23进行对检测车辆的周围状况的检测单元41~检测单元43的控制以及检测结果的信息处理。检测单元41是对车辆1的前方进行拍摄的摄像机(以下,有时表述为摄像机41。),在本实施方式的情况下,在车辆1的车顶前部安装于前窗的车厢内侧。通过对摄像机41所拍摄到的图像进行分析,能够提取出目标物的轮廓、道路上的车道的划分
线(白线等)。
31.检测单元42是光学雷达(light detection and ranging,激光探测及测距)(以下,有时表述为光学雷达42),对车辆1的周围的目标物进行检测、或者对与目标物之间的距离进行测距。在本实施方式的情况下,设置有五个光学雷达42,在车辆1的前部的各角部各设置有一个,在后部中央设置有一个,在后部各侧方各设置有一个。检测单元43是毫米波雷达(以下,有时表述为雷达43),对车辆1的周围的目标物进行检测、或者对与目标物之间的距离进行测距。在本实施方式的情况下,设置有五个雷达43,在车辆1的前部中央设置有一个,在前部各角部各设置有一个,在后部各角部各设置有一个。
32.ecu22进行对一方的摄像机41、各光学雷达42的控制以及检测结果的信息处理。ecu23进行对另一方的摄像机41、各雷达43的控制以及检测结果的信息处理。通过具备两组对车辆的周围状况进行检测的装置,能够提高检测结果的可靠性,另外,通过具备摄像机、光学雷达、雷达这样的不同种类的检测单元,能够多方面地进行车辆的周边环境的分析。
33.ecu24进行对陀螺仪传感器5、gps传感器24b、通信装置24c的控制以及检测结果或通信结果的信息处理。陀螺仪传感器5对车辆1的旋转运动进行检测。能够根据陀螺仪传感器5的检测结果、车轮速度等对车辆1的行进路线进行判定。gps传感器24b对车辆1的当前位置进行检测。通信装置24c与提供地图信息、交通信息的服务器进行无线通信,并获取这些信息。ecu24能够访问在存储器中构建的地图信息的数据库24a,ecu24进行从当前所在地到目的地的路线探索等。ecu24、地图数据库24a、gps传感器24b构成所谓的导航装置。
34.ecu25具备车与车之间通信用的通信装置25a。通信装置25a与周边的其他车辆进行无线通信,并进行车辆间的信息交换。tcu(telematics control unit,远程信息控制单元)30使用蜂窝线路与网络进行通信。另外,tcu30也可以进行基于wi
‑
fi(注册商标)、dsrc(dedicated short range communications,专用短程通信技术)等的通信。
35.ecu26对动力装置6进行控制。动力装置6是输出使车辆1的驱动轮旋转的驱动力的机构,例如包括发动机和变速器。ecu26例如根据由设置在油门踏板7a上的操作检测传感器7a所检测到的驾驶员的驾驶操作(油门操作或加速操作)而对发动机的输出进行控制,或者基于车速传感器7c所检测到的车速等信息来切换变速器的变速挡。在车辆1的驾驶状态为自动驾驶的情况下,ecu26根据来自ecu20的指示而对动力装置6进行自动控制,并对车辆1的加速减速进行控制。
36.ecu27对包括方向指示器8(转向灯)的照明器件(前照灯、尾灯等)进行控制。在图1的例子的情况下,方向指示器8设置于车辆1的前部、车门镜以及后部。
37.ecu28进行对输入输出装置9的控制。输入输出装置9进行对驾驶员的信息输出和来自驾驶员的信息的输入的接受。语音输出装置91通过语音对驾驶员报告信息。显示装置92通过图像的显示对驾驶员报告信息。显示装置92例如配置于驾驶席正面,并构成仪表盘等。此外,在此举例示出了语音和显示,但是也可以通过振动、光来报告信息。另外,也可以组合语音、显示、振动或者光中的多个来报告信息。进一步地,还可以根据待报告的信息的等级(例如紧急度)而使组合不同或者使报告方式不同。输入装置93是配置在驾驶员能够操作的位置而对车辆1进行指示的开关组,还可以包括语音输入装置。
38.ecu29对制动装置10、驻车制动器(未图示)进行控制。制动装置10例如是盘式制动装置,设置于车辆1的各车轮,通过对车轮的旋转施加阻力来使车辆1减速或者停止。ecu29
例如根据由设置在制动踏板7b上的操作检测传感器7b所检测到的驾驶员的驾驶操作(制动操作)而对制动装置10的工作进行控制。在车辆1的驾驶状态为自动驾驶的情况下,ecu29根据来自ecu20的指示而对制动装置10进行自动控制,并对车辆1的减速以及停止进行控制。制动装置10、驻车制动器还能够为了维持车辆1的停止状态而进行工作。另外,在动力装置6的变速器具备驻车锁止机构的情况下,还能够为了维持车辆1的停止状态而使所述驻车锁止机构工作。
39.参照图2,对电子连结行驶系统的概要进行说明。电子连结行驶系统也可以称为列队行驶系统、电子牵引系统。电子连结行驶系统是指两台以上的车辆在电子连结的状态下行驶的系统。电子连结的状态是指前方车辆能够随时对后续车辆提供在后续车辆的行驶中使用的信息的状态。电子连结的后续车辆不需要驾驶员的驾驶操作,能够自动地跟随前方车辆。后续车辆的驾驶座可以有人,也可以没有人。电子连结行驶系统的整体构成可以与现有技术相同,因此以下对其概要进行说明。
40.图2表示构成电子连结行驶系统的前方车辆200以及后续车辆250各自的功能构成例。前方车辆200以及后续车辆250均可以具有与图1的车辆1相同的构成。在图2中,省略了图1所示的构成要素的一部分。
41.前方车辆200具有前导信息提供部201。前导信息提供部201可以由执行与自动驾驶相关的控制的ecu20来实现。取而代之地(例如,在前方车辆200不具有自动驾驶功能的情况下),前导信息提供部201也可以由控制装置2内的其他ecu来实现。
42.前导信息提供部201收集驾驶员对油门踏板7a、制动踏板7b以及方向盘31的操作量、由车速传感器7c检测出的车速这样的、与前方车辆200的行驶相关的信息(以下,称为行驶信息)。前导信息提供部201基于行驶信息,生成后续车辆250为了跟随前方车辆200而使用的信息(以下,称为前导信息)。前导信息提供部201通过通信装置25a向后续车辆250提供前导信息。前方车辆200的通信装置25a与后续车辆250的通信装置25a之间的通信可以通过车与车之间通信来进行。在对后续车辆250进行前导的过程中的前方车辆200的行驶可以通过手动驾驶来进行,也可以通过自动驾驶来进行。
43.后续车辆250具有跟随行驶部251。跟随行驶部251可以由执行与自动驾驶相关的控制的ecu20来实现。取而代之地(例如,在后续车辆250不具有自动驾驶功能的情况下),跟随行驶部251也可以由图1的其他ecu、未图示的专用的ecu来实现。
44.跟随行驶部251通过通信装置25a从前方车辆200获取前导信息。跟随行驶部251基于前导信息,自动地对后续车辆250的行驶(具体而言,与驱动、制动以及转向相关的致动器的驱动量)进行控制,以跟随前方车辆200。跟随行驶部251可以进一步基于由检测单元41~检测单元43获取到的与前方车辆200的相对距离、相对速度、相对角度等,对后续车辆250的行驶进行控制,以跟随前方车辆200。后续车辆250对前方车辆200的跟随可以以在与前方车辆200相同的轨迹上行驶的方式(例如,以前方车辆200的车宽中心的轨道与后续车辆250的车宽中心的轨道一致的方式)来进行。跟随行驶部251可以以前方车辆200与后续车辆250之间的距离恒定的方式来进行跟随,也可以以在停止或低速时缩短距离并在高速时延长距离等根据车速改变距离的方式来进行跟随。以下,将前方车辆200与后续车辆250之间的距离简称为两个车辆的车间距离。作为两个车辆的车间距离,如果是在行驶中的情况下可以是使其他车辆不能进入前方车辆200与后续车辆250之间的较短的距离(例如1m),如果是在停
止中的情况下可以是使行人对进入前方车辆200与后续车辆250之间产生犹豫这样的更短的距离(例如50cm)。
45.在电子连结行驶系统中,各种类型的车辆能够成为前方车辆200。在图3中,作为能够成为前方车辆200的车辆的一个例子,对卡车300的构成例进行说明。卡车300由车身301和载货台302构成。在图3的例子中,示出了载货台302为货厢(van)的情况,但载货台302也可以是平体等其他类型。载货台302具有用于收纳货物的货舱303。货舱303是用于收纳货物的空间(即,货物空间)的一个例子。在载货台302的车辆后方侧设置有双开的摆动门304。摆动门304是用于进入货舱303的开闭体的一个例子。进一步地,在载货台302的车辆后方侧设置有用于装卸货物的升降机305。
46.为了使用如卡车300这样具有向车辆后方打开的开闭体(例如,摆动门304)的载货台302的货舱303(例如,进行货物的装卸),在车辆后方需要一定程度的作业空间。在如卡车300这样具有升降机305的车辆中,有可能需要更大的作业空间。如上所述,两个车辆的车间距离维持为较短的距离。若在维持该距离的状态下两个车辆停止,则有可能难以进入前方车辆的货舱。在本实施方式中,如以下具体说明的那样,能够使后续车辆250以适当的车间距离停止。具体而言,基于与前方车辆200的货物空间相关的信息来决定停止时的两个车辆的车间距离。在后述的第一实施方式中,与货物空间相关的信息包括货物空间的构成。在后述的第二实施方式中,与货物空间相关的信息包括前方车辆200的停止目的是否是货物空间的使用。
47.参照图4a~图4d,对停止时的两个车辆的车间距离进行说明。图4a~图4d分别表示前方车辆200停止并且伴随于此后续车辆250也停止的状态。在图4a~图4d的每一个中,后续车辆250都是轿车,但也可以是其他类型的车辆。
48.参照图4a,对前方车辆200为轿车、且在前方车辆200的停止中不使用前方车辆200的货舱的情况进行说明。轿车、掀背式汽车这样的车辆是即使在打开车辆后方的开闭体的情况下开闭体也不会从车辆的后端突出的车辆的一个例子。由于在停止中不使用前方车辆200的货舱,因此即使两个车辆的车间距离401较短也没有问题。因此,车间距离401例如可以是1m、50cm这样的使其他车辆不能进入的值、使行人对进入产生犹豫的值。
49.参照图4b,对前方车辆200为卡车、且在前方车辆200停止中不使用前方车辆200的货舱的情况进行说明。卡车(例如,如图3所示,货舱303设置在与车身301分开的载货台302上的车辆)、小型货车(minivan)是在打开车辆后方的开闭体的情况下开闭体从车辆的后端突出的车辆的一个例子。由于在停止中不使用前方车辆200的货舱,因此即使两个车辆的车间距离402较短也没有问题。因此,车间距离402例如可以是1m、50cm这样的使其他车辆不能进入的值、使行人对进入产生犹豫的值。车间距离402可以与车间距离401相等。
50.参照图4c,对前方车辆200为轿车、且在前方车辆200的停止中使用前方车辆200的货舱的情况进行说明。由于在停止中使用前方车辆200的货舱,因此若前方车辆200与后续车辆250之间的车间距离403较短,则后续车辆250有可能会妨碍前方车辆200的货舱的使用。因此,车间距离403可以比车间距离401长。例如,车间距离403可以是车间距离401的2倍(例如2m)。
51.参照图4d,对前方车辆200为卡车、且在前方车辆200停止中使用前方车辆200的货舱的情况进行说明。由于在停止中使用前方车辆200的货舱,因此若两个车辆的车间距离
404较短,则后续车辆250有可能会妨碍前方车辆200的货舱的使用。因此,车间距离404可以比车间距离402长。进一步地,在前方车辆200为卡车的情况下,与前方车辆200为轿车的情况相比,在装货台的使用中有可能需要较多的空间。因此,车间距离404可以比车间距离403长。例如,车间距离404可以是车间距离402的3倍(例如3m)。
52.<第一实施方式>
53.接着,对用于能够使后续车辆250以适当的车间距离停止的第一实施方式进行说明。在第一实施方式中,基于前方车辆200的货舱的构成来决定停止时的两个车辆的车间距离。在图5所示的动作例中,由后续车辆250决定停止时的两个车辆的车间距离。在图6所示的动作例中,由前方车辆200决定停止时的两个车辆的车间距离。
54.参照图5,对由后续车辆250决定停止时的两个车辆的车间距离的情况进行说明。图5所示的动作例由后续车辆250的控制装置2(具体而言,跟随行驶部251)来执行。该动作可以通过由控制装置2的处理器(例如,处理器20a)执行存储在存储器(例如,存储器20b)中的程序来进行。取而代之地,图5的动作的一部分或全部也可以通过专用电路来执行。
55.在步骤s501中,后续车辆250的控制装置2(以下,在图5的说明中,将“后续车辆250的控制装置2”简称为“控制装置2”)开始对前方车辆200的跟随。控制装置2在开始跟随后,从前方车辆200持续地接收前导信息,并基于前导信息来进行后续车辆250的行驶控制。
56.在步骤s502中,控制装置2对前方车辆200的货舱的构成进行判定。货舱的构成可以包括用于进入货舱的开闭体的大小、开闭体相对于货舱的安装方式、货舱的大小中的至少一项。开闭体的大小可以是车门的直径。开闭体相对于货舱的安装方式可以是开闭体是否被安装为以不从车辆后端突出的方式打开。另外,开闭体相对于货舱的安装方式也可以是开闭体是否相对于货舱而安装在车辆后方。货舱的大小可以是货舱的底面积,也可以是货舱的装载容量。
57.控制装置2可以基于由检测单元41得到的前方车辆200的图像来判定前方车辆200的货舱的构成。取而代之地或者在此基础上,控制装置2也可以根据来自前方车辆200的信息来判定前方车辆200的货舱的构成。该信息可以明示地表示货舱的构成(例如,大小的具体值等),也可以暗示地表示货舱的构成(例如,车型、载货台的型号等)。例如,控制装置2可以通过访问自身或外部的数据库,根据前方车辆200的车型、载货台的型号检索具体的大小。
58.在步骤s503中,控制装置2基于前方车辆200的货舱的构成来决定停止时的两个车辆的车间距离。例如,如果开闭体相对于前方车辆200的货舱的安装位置仅是车辆的侧方,则后续车辆250的停止位置不会对前方车辆200的货舱的使用造成影响。因此,控制装置2如车间距离401或车间距离402那样缩短车间距离。另一方面,如果开闭体相对于货舱的安装位置是车辆的后方,则控制装置2如车间距离403或车间距离404那样延长车间距离。控制装置2也可以基于开闭体的大小和货舱的大小来决定将两个车辆的车间距离延长到何种程度。例如,控制装置2将两个车辆的车间距离决定为大于打开开闭体时开闭体从车辆的后端突出的量,以便能够打开开闭体。另外,控制装置2还考虑人为了打开开闭体而站立的空间。进一步地,认为货舱越大,在货物的装卸时使用的作业空间也越大。因此,控制装置2也可以以与货舱的大小具有正相关的方式来决定两个车辆的车间距离。控制装置2将所决定的车间距离存储在存储器20b中,以便能够在后续的步骤中使用。
59.在步骤s504中,控制装置2基于从前方车辆200获取到的前导信息来判定前方车辆200是否停止。控制装置2在判定为前方车辆200停止的情况下(步骤s504中的“是”),使处理转移至步骤s505,在除此以外的情况下(步骤s504中的“否”),重复步骤s504。例如,控制装置2可以在前方车辆200处于减速中、且前方车辆200的速度变为时速5km以下的情况下,判定为前方车辆200停止。
60.在步骤s505中,控制装置2在前方车辆200停止时,以形成在步骤s503中决定的车间距离的方式使后续车辆250停止。
61.在步骤s506中,控制装置2判定前方车辆200是否起步。控制装置2在判定为前方车辆200起步的情况下(在步骤s506中的“是”),使处理转移至步骤s507,在除此以外的情况下(步骤s506中的“否”),重复步骤s506。
62.在步骤s507中,控制装置2随着前方车辆200的起步而使后续车辆250起步。之后,控制装置2使处理返回至步骤s504,进行待机直到前方车辆200停止。
63.参照图6,对由前方车辆200决定停止时的两个车辆的车间距离的情况进行说明。图6所示的动作例由前方车辆200的控制装置2(具体而言,前导信息提供部201)来执行。该动作可以通过由控制装置2的处理器(例如,处理器20a)执行存储在存储器(例如,存储器20b)中的程序来进行。取而代之地,图6的动作的一部分或全部也可以通过专用电路来执行。
64.在步骤s601中,前方车辆200的控制装置2(以下,在图6的说明中,将“前方车辆200的控制装置2”简称为“控制装置2”)开始后续车辆250的前导。控制装置2在开始前导后,持续地向后续车辆250发送前导信息。后续车辆250基于前导信息来跟随前方车辆200。
65.在步骤s602中,控制装置2对前方车辆200的货舱的构成进行判定。货舱的构成的具体例可以与在步骤s502中说明的内容相同。控制装置2可以基于存储在自身的存储装置(例如,存储器20b)中的信息来判定前方车辆200的货舱的构成。该信息可以明示地表示货舱的构成(例如,大小的具体值等),也可以暗示地表示货舱的构成(例如,车型、载货台的型号等)。例如,控制装置2可以通过访问自身或外部的数据库,根据前方车辆200的车型、载货台的型号检索具体的大小。
66.在步骤s603中,控制装置2基于前方车辆200的货舱的构成来决定停止时的两个车辆的车间距离。具体的决定方法可以与在步骤s503中说明的方法相同。在步骤s604中,控制装置2将所决定的两个车辆的车间距离通知给后续车辆250。之后,控制装置2继续进行后续车辆250的前导。在前方车辆200停止时,后续车辆250的控制装置2以形成所通知的两个车辆的车间距离的方式使后续车辆250停止。
67.在第一实施方式中,无论在停止时是否使用前方车辆200的货舱,都以针对前方车辆200的货舱的使用而形成充分的车间距离的方式使后续车辆250停止。因此,两个车辆的车间距离的决定可以在跟随开始后仅进行一次。
68.<第二实施方式>
69.接着,对用于能够使后续车辆250以适当的车间距离停止的第二实施方式进行说明。在第二实施方式中,基于前方车辆200的停止目的是否为前方车辆200的货舱的使用来决定停止时的两个车辆的车间距离。在图7所示的动作例中,由后续车辆250决定停止时的两个车辆的车间距离。在图8所示的动作例中,由前方车辆200决定停止时的两个车辆的车
间距离。
70.参照图7,对由后续车辆250决定停止时的两个车辆的车间距离的情况进行说明。图7所示的动作例由后续车辆250的控制装置2(具体而言,跟随行驶部251)来执行。该动作可以通过由控制装置2的处理器(例如,处理器20a)执行存储在存储器(例如,存储器20b)中的程序来进行。取而代之地,图7的动作的一部分或全部也可以通过专用电路来执行。
71.在步骤s701中,后续车辆250的控制装置2(以下,在图7的说明中,将“后续车辆250的控制装置2”简称为“控制装置2”)开始对前方车辆200的跟随。控制装置2在开始跟随后,从前方车辆200持续地接收前导信息,并基于前导信息来进行后续车辆250的行驶控制。
72.在步骤s702中,控制装置2基于从前方车辆200获取到的前导信息来判定前方车辆200是否停止。控制装置2在判定为前方车辆200停止的情况下(步骤s702中的“是”),使处理转移至步骤s703,在除此以外的情况下(步骤s702中的“否”),重复步骤s702。例如,控制装置2可以在前方车辆200处于减速中、且前方车辆200的速度变为时速5km以下的情况下,判定为前方车辆200停止。
73.在步骤s703中,控制装置2对前方车辆200的停止目的进行判定。例如,控制装置2可以基于前方车辆200的停止位置来判定前方车辆200的停止目的是否为前方车辆200的货舱的使用。前方车辆200的停止目的为前方车辆200的货舱的使用是指,只要前方车辆200的停止目的之一为前方车辆200的货舱的使用即可,也可以包含其他目的。
74.具体而言,控制装置2可以在前方车辆200停止在车道中央附近的情况下,判定为不是为了使用货舱的停止。控制装置2可以在前方车辆200靠近人行道停止的情况下,判定为是为了使用货舱的停止。该情况下的停止位置可以是前方车辆200的周围的交通环境中的相对位置。
75.控制装置2可以基于前方车辆200的预定揽收配送位置与前方车辆200的停止位置的比较结果来判定前方车辆200的停止目的是否为前方车辆200的货舱的使用。例如,控制装置2可以在前方车辆200的停止位置为配送基地附近的情况下、或为预定揽收配送的地址附近的情况下,判定为是为了使用货舱的停止。该情况下的停止位置可以是前方车辆200的地理位置。控制装置2可以从前方车辆200获取前方车辆200的预定揽收配送的地址的位置。另外,控制装置2可以从导航系统的地图数据中获取配送基地的位置。控制装置2可以在前方车辆200的停止位置的周围不存在有可能成为揽收配送对象的建筑物的情况下,判定为不是为了使用货舱的停止。
76.控制装置2也可以基于来自前方车辆200的通知来判定前方车辆200的停止目的是否为前方车辆200的货舱的使用。前方车辆200的驾驶员也可以在每当前方车辆200停止时,向后续车辆250通知其停止目的是否为前方车辆200的货舱的使用。
77.控制装置2也可以将上述各种基准组合来判定前方车辆200的停止目的。控制装置2也可以在无法判定前方车辆200的停止目的的情况下判定为是为了使用货舱的停止,以便不妨碍前方车辆200的货舱的使用。
78.在步骤s704中,控制装置2基于前方车辆200的停止目的的判定结果来决定停止时的两个车辆的车间距离。例如,控制装置2在前方车辆200的停止目的不是前方车辆200的货舱的使用的情况下,如车间距离401或车间距离402那样,缩短车间距离。另一方面,控制装置2在前方车辆200的停止目的是前方车辆200的货舱的使用的情况下,如车间距离403或车
间距离404那样,延长车间距离。控制装置2也可以与步骤s502同样地对前方车辆200的货舱的构成进行判定,并进一步基于货舱的构成来决定停止时的两个车辆的车间距离。
79.在步骤s705中,控制装置2在前方车辆200停止时,以形成在步骤s704中决定的车间距离的方式使后续车辆250停止。步骤s706以及步骤s707与步骤s506以及步骤s507相同。
80.参照图8,对由前方车辆200决定停止时的两个车辆的车间距离的情况进行说明。图8所示的动作例由前方车辆200的控制装置2(具体而言,前导信息提供部201)来执行。该动作可以通过由控制装置2的处理器(例如,处理器20a)执行存储在存储器(例如,存储器20b)中的程序来进行。取而代之地,图8的动作的一部分或全部也可以通过专用电路来执行。
81.在步骤s801中,前方车辆200的控制装置2(以下,在图8的说明中,将“前方车辆200的控制装置2”简称为“控制装置2”)开始后续车辆250的前导。控制装置2在开始前导后,持续地向后续车辆250发送前导信息。后续车辆250基于前导信息来跟随前方车辆200。
82.在步骤s802中,控制装置2判定前方车辆200是否停止。控制装置2在判定为前方车辆200停止的情况下(步骤s802的“是”),使处理转移至步骤s803,在除此以外的情况下(步骤s802中的“否”),重复步骤s802。例如,控制装置2可以在前方车辆200处于减速中、且前方车辆200的速度变为时速5km以下的情况下,判定为前方车辆200停止。
83.在步骤s803中,控制装置2以与步骤s703同样的方式,对前方车辆200的停止目的进行判定。控制装置2也可以与图7中不同而基于来自前方车辆200的乘员(例如,驾驶员)的指示来判定前方车辆200的停止目的是否为前方车辆200的货舱的使用。
84.在步骤s804中,控制装置2以与步骤s704同样的方式决定停止时的两个车辆的车间距离。在步骤s805中,控制装置2将所决定的两个车辆的车间距离通知给后续车辆250。在步骤s806中,控制装置2判定前方车辆200是否起步。控制装置2在判定为前方车辆200起步的情况下(步骤s806中的“是”),使处理转移至步骤s802,在除此以外的情况下(步骤s806中的“否”),重复步骤s806。
85.在第二实施方式中,基于在停止时是否使用前方车辆200的货舱,以针对前方车辆200的货舱的使用而形成充分的车间距离的方式使后续车辆250停止。因此,每当前方车辆200停止时,判定前方车辆200的停止目的是否为前方车辆200的货舱的使用,并基于判定结果来决定两个车辆的车间距离。
86.<实施方式的总结>
87.<项目1>
88.一种控制装置,其是车辆(1、250)的控制装置(2),其中,
89.所述控制装置具备:
90.行驶控制部(251),其基于从前方车辆(200)接收到的信息,将所述车辆的行驶控制为跟随所述前方车辆;以及
91.距离决定部(251),其基于与所述前方车辆的货物空间(303)相关的信息来决定停止时的所述车辆与所述前方车辆之间的车间距离(401~404),
92.所述行驶控制部在所述前方车辆停止时以形成由所述距离决定部决定的车间距离的方式使所述车辆停止。
93.根据该项目,在跟随行驶的执行中,能够使后续车辆停止在不妨碍前方车辆的货
物空间的使用的位置。
94.<项目2>
95.根据项目1所述的控制装置,其中,与所述货物空间相关的信息包括用于从车外进入所述货物空间的开闭体(304)的大小、所述开闭体相对于所述货物空间的安装方式、以及所述货物空间的大小中的至少一项。
96.根据该项目,能够使后续车辆停止在更适当的位置。
97.<项目3>
98.根据项目1或2所述的控制装置,其中,与所述货物空间相关的信息包括所述前方车辆的停止目的是否为所述货物空间的使用。
99.根据该项目,能够使后续车辆停止在更适当的位置。
100.<项目4>
101.根据项目3所述的控制装置,其中,每当所述前方车辆停止时,所述距离决定部判定所述前方车辆的停止目的是否为所述货物空间的使用,并基于判定结果来决定所述车间距离。
102.根据该项目,每当前方车辆停止时,能够使后续车辆停止在适当的位置。
103.<项目5>
104.根据项目3或4所述的控制装置,其中,所述距离决定部基于所述前方车辆的停止位置来判定所述前方车辆的停止目的是否为所述货物空间的使用。
105.根据该项目,能够高精度地判定车辆的停止目的。
106.<项目6>
107.根据项目5所述的控制装置,其中,所述距离决定部基于所述前方车辆的预定揽收配送位置与所述前方车辆的停止位置之间的比较结果来判定所述前方车辆的停止目的是否为所述货物空间的使用。
108.根据该项目,能够更高精度地判定车辆的停止目的。
109.<项目7>
110.根据项目3至6中任一项所述的控制装置,其中,所述距离决定部基于来自所述前方车辆的通知来判定所述前方车辆的停止目的是否为所述货物空间的使用。
111.根据该项目,能够高精度地判定车辆的停止目的。
112.<项目8>
113.一种控制装置,其是车辆(1、200)的控制装置(2),其中,
114.所述控制装置具备:
115.提供部(201),其将后续车辆(250)为了跟随所述车辆而使用的信息提供给所述后续车辆;
116.距离决定部(201),其基于与所述车辆的货物空间(303)相关的信息来决定停止时的所述车辆与所述后续车辆之间的车间距离(401~404);以及
117.通知部(201),其将由所述距离决定部决定的车间距离通知给所述后续车辆。
118.根据该项目,在跟随行驶的执行中,能够使后续车辆停止在不妨碍前方车辆的货物空间的使用的位置。
119.<项目9>
120.根据项目8所述的控制装置,其中,与所述货物空间相关的信息包括用于从车外进入所述货物空间的开闭体(304)的大小、所述开闭体相对于所述货物空间的安装方式、以及所述货物空间的大小中的至少一项。
121.根据该项目,能够使后续车辆停止在更适当的位置。
122.<项目10>
123.根据项目8或9所述的控制装置,其中,与所述货物空间相关的信息包括所述车辆的停止目的是否为所述货物空间的使用。
124.根据该项目,能够使后续车辆停止在更适当的位置。
125.<项目11>
126.根据项目10所述的控制装置,其中,每当所述车辆停止时,所述距离决定部判定所述车辆的停止目的是否为所述货物空间的使用,并基于判定结果来决定所述车间距离。
127.根据该项目,每当前方车辆停止时,能够使后续车辆停止在适当的位置。
128.<项目12>
129.根据项目10或11所述的控制装置,其中,所述距离决定部基于所述车辆的停止位置来判定所述车辆的停止目的是否为所述货物空间的使用。
130.根据该项目,能够高精度地判定车辆的停止目的。
131.<项目13>
132.根据项目12所述的控制装置,其中,所述距离决定部基于所述车辆的预定揽收配送位置与所述车辆的停止位置之间的比较结果来判定所述车辆的停止目的是否为所述货物空间的使用。
133.根据该项目,能够更高精度地判定车辆的停止目的。
134.<项目14>
135.根据项目10至13中任一项所述的控制装置,其中,所述距离决定部基于来自所述车辆的乘员的指示来判定所述车辆的停止目的是否为所述货物空间的使用。
136.根据该项目,能够高精度地判定车辆的停止目的。
137.<项目15>
138.一种车辆(1、200、250),其具有项目1至14中任一项所述的控制装置(2)。
139.根据该项目,提供具有上述特征的车辆。
140.本发明不限于上述的实施方式,可以在本发明的主旨的范围内进行各种变形、变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1