一种集成多动力源的机电飞轮混合动力装置控制方法
1.本发明涉及电动汽车控制领域,特别是一种集成多动力源的机电飞轮混合动力装置控制方法。
背景技术:
2.目前,双电机或多电机技术方案已在电动汽车上得到了应用,双电机或多电机技术方案的应用提高了汽车的经济性和能量利用率,但仍无法有效解决负载突变工况下,车载动力电池大电流充电或放电造成的不利影响,飞轮具有高功率密度优势,将其设计为车载锂动力电池辅助储能装置,借助合理的系统控制方法,负载突变驱动工况、车辆高驱动功率行车需求下,通过控制飞轮的介入,能够有效改善锂动力电池工作效率和使用寿命,并延长续驶里程,已受到汽车行业广泛关注。
技术实现要素:
3.根据以上现有技术中的不足,本发明提供一种集成多动力源的机电飞轮混合动力装置控制方法。将飞轮设计为车辆辅助动力源,借助其瞬时大功率释放或回馈优势,可降低车辆对电机及动力电池的功率需要,避免负载突变工况下,电池大电流充电或放电,提高车载能源动力系统的工作效率,并延长其使用寿命。
4.本发明技术方案是:提供一种集成多动力源的机电飞轮混合动力装置控制方法,混合动力装置通过读取整车控制器发出的指令,对飞轮、太阳轮制动器、第一电机动力源、离合器、转速耦合齿轮、同步器、第二电机动力源、齿圈制动器进行控制。集成多动力源的机电飞轮混合动力装置控制方法的特征在于:(1)控制方法主程序设计用于检测车辆运行于何种状态,通过读取驱动踏板开度数据、制动踏板开度数据、车速信号数据,判断车辆是否运行驱动、制动或故障模式;若运行于驱动模式,则调用控制子程序1;若运行于制动模式,则调用控制子程序2;若运行于滑行模式,则调用控制子程序3;(2)控制方法子程序1通过车辆需求功率与第一动力源飞轮、第二动力源电机、第三动力源电机所能提供驱动功率之间的关系,判定车辆的驱动模式,对各部件输出相应的控制信号,运行于单电机驱动模式、双电机驱动模式或者双电机飞轮联合驱动模式;(3)控制方法子程序2通过车辆需求功率与第一动力源飞轮、第二动力源电机、第三动力源电机所能提供最大制动功率之间的关系,判定车辆的再生制动模式,对各部件输出相应的控制信号,运行于单电机制动模式、双电机制动模式或者双电机飞轮联合制动模式;(4)控制方法子程序3通过车辆需求滑行制动功率与第一动力源飞轮、第二动力源电机、第三动力源电机所能提供最大制动功率之间的关系,判定车辆的滑行再生制动模式,对各部件输出相应的控制信号,运行于单电机制动模式、双电机制动模式或者双电机飞轮联合制动模式。
5.本发明的优点在于:1、本发明通过设计一种集成多动力源的机电飞轮混合动力装置控制方法,低负荷工况下,当车辆需求驱动功率或制动功率较小时,可控制离合器分离,第一动力源单独驱动车辆或参与整车再生制动,提高低负荷工况下车辆行驶的经济性;2、本发明通过设计一种集成多动力源的机电飞轮混合动力装置控制方法,中等负荷工况下,当车辆需求驱动功率或制动功率中等时,通过控制离合器结合、太阳轮制动器锁止、同步器结合套与转速耦合齿轮结合,第一动力源与第二动力源联合驱动车辆运行或联合参与整车再生制动,提高中等负荷工况下车辆的能量利用率;3、本发明通过设计一种集成多动力源的机电飞轮混合动力装置控制方法,大负荷工况下,当车辆需求驱动功率或制动功率较大时,通过控制离合器结合、太阳轮制动器分离、同步器结合套与第二转矩耦合齿轮结合,第一动力源、第二动力源及飞轮三个动力源联合驱动车辆运行或联合参与整车再生制动,避免了车载动力电池过放、过充问题。
附图说明
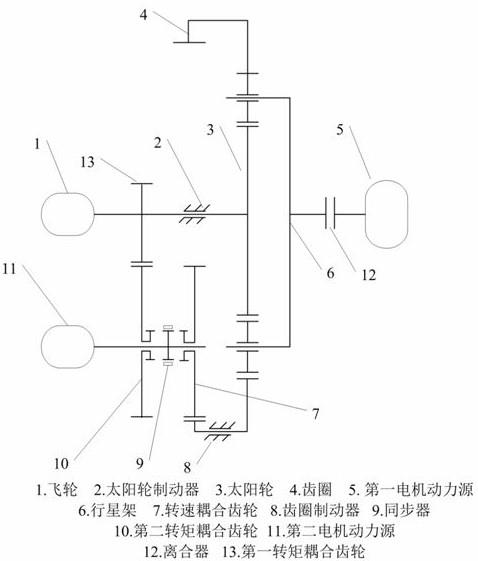
6.图1为集成多动力源的机电飞轮混合动力装置示意图。
7.图2为集成多动力源的机电飞轮混合动力装置控制策略主程序;图3为集成多动力源的机电飞轮混合动力装置控制策略子程序1;图4为集成多动力源的机电飞轮混合动力装置控制策略子程序2;图5为集成多动力源的机电飞轮混合动力装置控制策略子程序3。
具体实施方式
8.下面结合附图对本发明作进一步的描述:图1为机电飞轮混合动力系统示意图,包括:飞轮、第一转矩耦合齿轮、第二转矩耦合齿轮、太阳轮、齿圈、行星架、太阳轮制动器、第一动力源电机、离合器、转速耦合齿轮、同步器、第二电机动力源、齿圈制动器;混合动力装置通过整车控制器的指令,依据相应的控制方法对飞轮、离合器、第一动力源电机、第二动力源电机、同步器、太阳轮制动器进行控制;具体可分为以下控制模式:(1)控制方法主程序设计用于检测车辆运行于何种状态,通过读取驱动踏板开度数据、制动踏板开度数据、车速信号数据,若检测到车辆要运行于驱动模式,则调用驱动控制子程序1;若检测到车辆运行于故障状态,则调用故障模式子程序;若检测到车辆要运行于制动状态,则调用制动控制子程序2;若检测到车辆要运行于滑行制动状态,则调用制动控制子程序3;(2)控制方法子程序1通过读取车辆参数,计算车辆所需功率pd,通过读取飞轮状态参数,计算飞轮允许输出功率pf,判断pd是否不大于设定功率pb1,若上述条件成立,则向离合器发送分离、太阳轮制动器发送分离、同步器发送分离、第一动力源发送输出功率pd、第二动力源发送输出功率0、飞轮发送输出功率0的指令,若上述条件不成立,则进一步判断pd是否小于等于pb2且大于pb1,若条件成立,则向离合器发送结合、太阳轮制动器发送锁止、同步器发送与转速耦合齿轮结合、第一动力源发送输出功率pb1、第二动力源发送输出功率pd
‑
pb1、飞轮发送输出功率0的指令,若条件不成立,则进一步判断pd是否大于pb2且小
于等于pb2与pf之和,若条件成立,则向离合器发送结合、太阳轮制动器发送分离、同步器发送与第二转矩耦合齿轮结合、第一动力源发送输出功率pb1、第二动力源发送输出功率pb2
‑
pb1、飞轮发送输出功率pd
‑
pb2的指令,否则修正车辆需求功率为pb2+pf,向离合器发送结合、太阳轮制动器发送分离、同步器发送与第二转矩耦合齿轮结合、第一动力源发送输出功率pb1、第二动力源发送输出功率pb2
‑
pb1、飞轮发送输出功率pf的指令;(3)控制方法子程序2通过读取车辆参数,计算车辆所需制动功率prd,通过读取飞轮状态参数,计算飞轮允许制动功率pmrf,判断prd是否不大于设定功率pmr1,若上述条件成立,则向离合器发送分离、太阳轮制动器发送分离、同步器发送分离、第一动力源发送制动功率prd、第二动力源发送制动功率0、飞轮发送制动功率0、机械制动器发送制动功率0的指令,若上述条件不成立,则进一步判断prd是否小于等于pmr2且大于pmr1,若条件成立,则向离合器发送结合、太阳轮制动器发送锁止、同步器发送与转速耦合齿轮结合、第一动力源发送制动功率pmr1、第二动力源发送制动功率prd
‑
pmr1、飞轮发送制动功率0、机械制动器发送制动功率0的指令,若条件不成立,则进一步判断prd是否大于pmr2且小于等于pmr2与pmrf之和,若条件成立,则向离合器发送结合、太阳轮制动器发送分离、同步器发送与第二转矩耦合齿轮结合、第一动力源发送制动功率pmr1、第二动力源发送制动功率pmr2
‑
pmr1、飞轮发送制动功率prd
‑
pmr2、机械制动器发送制动功率0的指令,否则向离合器发送结合、太阳轮制动器发送分离、同步器发送与第二转矩耦合齿轮结合、第一动力源发送制动功率pmr1、第二动力源发送制动功率pmr2
‑
pmr1、飞轮发送制动功率pf、机械制动器发送制动功率prd
‑
pmre1
‑
pmre2的指令;(4)控制方法子程序3通过读取车辆参数,计算车辆所需滑行制动功率prd,通过读取飞轮状态参数,计算飞轮允许制动功率pmrf,判断prd是否不大于设定功率pmr1,若上述条件成立,则向离合器发送分离、太阳轮制动器发送分离、同步器发送分离、第一动力源发送制动功率prd、第二动力源发送制动功率0、飞轮发送制动功率0、机械制动器发送制动功率0的指令,若上述条件不成立,则进一步判断prd是否小于等于pmr2且大于pmr1,若条件成立,则向离合器发送结合、太阳轮制动器发送锁止、同步器发送与转速耦合齿轮结合、第一动力源发送制动功率pmr1、第二动力源发送制动功率prd
‑
pmr1、飞轮发送制动功率0、机械制动器发送制动功率0的指令,若条件不成立,则进一步判断prd是否大于pmr2且小于等于pmr2与pmrf之和,若条件成立,则向离合器发送结合、太阳轮制动器发送分离、同步器发送与第二转矩耦合齿轮结合、第一动力源发送制动功率pmr1、第二动力源发送制动功率pmr2
‑
pmr1、飞轮发送制动功率prd
‑
pmr2、机械制动器发送制动功率0的指令,否则修正车辆需求滑行制动功率为pmr2+pmrf,向离合器发送结合、太阳轮制动器发送分离、同步器发送与第二转矩耦合齿轮结合、第一动力源发送制动功率pmr1、第二动力源发送制动功率pmr2
‑
pmr1、飞轮发送制动功率pf、机械制动器发送制动功率0的指令。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1