车载装置、车辆以及控制方法与流程
1.本发明涉及车载装置、车辆及其控制方法。
背景技术:
2.在专利文献1中公开了一种雷达系统,其具备以与保险杠的内壁面对的方式配置的雷达装置和在保险杠的内壁形成的多个突起部。在该雷达系统中,为了在较宽的角度范围内提高电波的透过性,多个突起部形成为与电波的入射角相应地高度不同。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2019
‑
200121号公报
技术实现要素:
6.发明所要解决的问题
7.专利文献1所记载的雷达装置配置在保险杠的内侧,因此该电波透过保险杠。在该情况下,由于保险杠(电波的透过部分)的涂料、厚度、曲率,雷达装置的检测结果产生误差,难以使用雷达装置高精度地检测车外的目标物(例如其他车辆)的位置。
8.因此,本发明的目的在于提供一种有利于使用电波高精度地检测车外的目标物的位置的技术。
9.用于解决课题的手段
10.为了实现上述目的,作为本发明的一个方面的车载装置的特征在于,具备:检测机构,其使用电波来检测本车辆的周围的目标物的位置;推定机构,其使用与所述检测机构不同的机构来推定所述目标物的位置;以及决定机构,其基于由所述检测机构检测出的所述目标物的位置与由所述推定机构推定出的所述目标物的位置之间的偏差,决定用于校正所述检测机构的检测结果的校正值。
11.为了实现上述目的,作为本发明的一个方面的控制方法是车辆的控制方法,所述车辆具备使用电波来检测本车辆的周围的目标物的位置的检测机构,其特征在于,包括:推定步骤,在该推定步骤中,使用与所述检测机构不同的机构来推定所述目标物的位置;以及决定步骤,在该决定步骤中,基于由所述检测机构检测出的所述目标物的位置与在所述推定步骤中推定出的所述目标物的位置之间的偏差,决定用于校正所述检测机构的检测结果的校正值。
12.发明效果
13.根据本发明,能够提供一种有利于使用电波高精度地检测车外的目标物的位置的技术。
附图说明
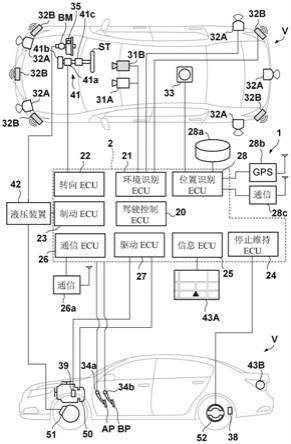
14.图1是车辆以及控制装置的框图。
15.图2表示校正值的决定处理的流程图。
16.图3是表示进行校正值的决定处理的状况例的图。
17.图4是表示雷达的检测角度与方位误差的关系的一例的图。
18.图5是表示第二实施方式中的其他车辆的位置的推定处理的流程图。
19.图6是表示第二实施方式中的其他车辆的行驶轨迹的设定例的图。
20.图7是表示第二实施方式中的其他车辆的行驶轨迹的设定例的图。
21.附图标记说明
22.1:控制装置;2:信息处理部;20~28:ecu;32b:雷达。
具体实施方式
23.以下,参照附图详细说明实施方式。另外,以下的实施方式并不限定权利要求书所涉及的发明,另外,实施方式中说明的特征的组合并非全部均是发明所必须的内容。实施方式中说明的多个特征中的两个以上的特征也可以任意地组合。另外,对相同或同样的结构标注相同的附图标记,并省略重复的说明。
24.<第一实施方式>
25.对本发明的第一实施方式进行说明。图1是本实施方式中的车辆v及其控制装置1的框图。在图1中,车辆v的概略由俯视图和侧视图表示。作为一个例子,车辆v是轿车型的四轮的乘用车。本实施方式的车辆v例如是并联方式的混合动力车辆。在该情况下,作为输出使车辆v的驱动轮旋转的驱动力的行驶驱动部的动力装置50能够包括内燃机、马达以及自动变速器。马达能够用作使车辆v加速的驱动源,并且在减速时等也能够用作发电机(再生制动)。
26.参照图1对作为车辆v的车载装置的控制装置1的结构进行说明。控制装置1可以包括由能够相互通信的多个ecu20~28构成的信息处理部2。各ecu包括以cpu为代表的处理器、半导体存储器等存储设备、与外部设备的接口等。在存储设备中存储有处理器所执行的程序、处理器在处理中使用的数据等。各ecu也可以具备多个处理器、存储设备以及接口等。此外,关于ecu的数量、所担负的功能,能够适当地设计,与本实施方式相比能够细化或整合。另外,在图1中标注ecu20~28的代表性功能的名称。例如,ecu20中记载为“驾驶控制ecu”。
27.ecu20执行与包括车辆v的驾驶控制在内的行驶辅助有关的控制。在本实施方式的情况下,ecu20控制车辆v的驱动(动力装置50对车辆v的加速等)、转向以及制动。在ecu20构成为能够控制车辆v的自动驾驶的情况下,ecu20不需要驾驶员的操作而自动地进行车辆v的驱动、转向以及制动。另外,ecu20在手动驾驶中例如能够执行碰撞减轻制动、车道脱离抑制等行驶辅助控制。碰撞减轻制动是在与前方的障碍物的碰撞可能性升高的情况下,指示制动装置51的工作来辅助避免碰撞。车道脱离抑制是在车辆v脱离行驶车道的可能性升高的情况下,指示电动动力转向装置41的工作来辅助避免车道脱离。
28.ecu21是基于检测车辆v的周围状况的检测单元31a、31b、32a、32b的检测结果来识别车辆v的行驶环境的环境识别单元。在本实施方式的情况下,ecu21能够基于检测单元31a、31b、32a、32b中的至少1个的检测结果来检测车辆v的周围的目标物(例如其他车辆)的位置。
29.检测单元31a、31b、32a、32b是能够检测车辆v(本车辆)的周围的目标物的传感器。检测单元31a、31b是拍摄车辆v的前方的摄像机(以下,有时表述为摄像机31a、摄像机31b),在车辆v的车顶前部安装于前窗的车室内侧。通过对摄像机31a、摄像机31b所拍摄的图像的解析,能够提取目标物的轮廓、道路上的车道的划分线(白线等)。
30.检测单元32a是光学雷达(lidar:light detection and ranging)(以下,有时表述为光学雷达32a),检测车辆v的周围的目标物,检测(测量)到目标物为止的距离、目标物的方向(方位)。在图1所示的例子中,设置有5个光学雷达32a,在车辆v的前部的各角部各设置1个,在后部中央设置1个,在后部各侧方各设置1个。另外,检测单元32b是毫米波雷达(以下,有时表述为雷达32b),使用电波来检测车辆v的周围的目标物,检测(测量)到目标物为止的距离、目标物的方向(方位)。在图1所示的例子中,设置有5个雷达32b,在车辆v的前部中央设置1个,在前部各角部各设置1个,在后部各角部各设置1个。
31.ecu22是控制电动动力转向装置41的转向控制单元。电动动力转向装置41包括根据驾驶员对方向盘st的驾驶操作(转向操作)对前轮进行转向的机构。电动动力转向装置41包括驱动单元41a、转向角传感器41b以及转矩传感器41c等,该驱动单元41a包含发挥用于转向操作的辅助或对前轮进行自动转向的驱动力(有时称为转向辅助转矩。)的马达,该转矩传感器41c检测驾驶员所担负的转向转矩(称为转向担负转矩,与转向辅助转矩区别)。
32.ecu23是控制液压装置42的制动控制单元。驾驶员对制动踏板bp的制动操作在制动主缸bm中转换为液压并传递至液压装置42。液压装置42是能够基于从制动主缸bm传递来的液压来控制向分别设置于四轮的制动装置(例如盘式制动装置)51供给的工作油的液压的致动器,ecu23进行液压装置42所具备的电磁阀等的驱动控制。另外,在制动时,ecu23能够点亮制动灯43b。由此,能够针对后方车辆而使其提高对车辆v的注意力。
33.ecu23以及液压装置42能够构成电动伺服制动器。ecu23例如能够对4个制动装置51的制动力与动力装置50所具备的马达的再生制动所产生的制动力的分配进行控制。ecu23还能够基于分别设置于四轮的车轮速度传感器38、横摆率传感器(未图示)、检测制动主缸bm内的压力的压力传感器35的检测结果,实现abs功能、牵引力控制以及车辆v的姿势控制功能。
34.ecu24是对设置于后轮的电动驻车制动装置52进行控制的停止维持控制单元。电动驻车制动装置52具备锁定后轮的机构。ecu24能够对基于电动驻车制动装置52的后轮的锁定以及锁定解除进行控制。
35.ecu25是对向车内报告信息的信息输出装置43a进行控制的车内报告控制单元。信息输出装置43a例如包括平视显示器、设置于仪表板的显示装置、或者声音输出装置。进而,也可以包含振动装置。ecu25例如使信息输出装置43a输出车速、外部气温等各种信息、路径引导等信息、与车辆v的状态相关的信息。
36.ecu26具备进行无线通信的通信装置26a。通信装置26a能够通过与具有通信功能的目标物之间的无线通信进行信息交换。具有通信功能的目标物例如能够举出车辆(车车间通信)、信号灯、交通监视装置等固定设备(路车间通信)、携带智能手机等便携终端的人(行人、自行车)。另外,ecu26能够通过通信装置26a访问互联网上的服务器等,取得天气的信息等各种信息。
37.ecu27是控制动力装置50的驱动控制单元。在本实施方式中,对动力装置50分配一
个ecu27,但也可以对内燃机、马达以及自动变速器各自逐一分配ecu。ecu27例如与由设置于加速踏板ap的操作检测传感器34a、设置于制动踏板bp的操作检测传感器34b检测出的驾驶员的驾驶操作、车速等对应地控制内燃机、马达的输出,或者切换自动变速器的变速挡。另外,在自动变速器中,作为检测车辆v的行驶状态的传感器,设置有检测自动变速器的输出轴的转速的转速传感器39。车辆v的车速能够根据转速传感器39的检测结果进行运算。
38.ecu28是识别车辆v的当前位置、行进路线的位置识别单元。ecu28进行陀螺仪传感器33、gps传感器28b、通信装置28c的控制、以及检测结果或通信结果的信息处理。陀螺仪传感器33检测车辆v的旋转运动(横摆率)。根据陀螺仪传感器33的检测结果等,能够判定车辆v的行进路线。gps传感器28b检测车辆v的当前位置。通信装置28c与提供地图信息、交通信息的服务器进行无线通信,并取得这些信息。在数据库28a中能够储存高精度的地图信息,ecu28基于该地图信息等,能够更高精度地确定车道上的车辆v的位置。另外,车辆v也可以设置有检测车辆v的速度的速度传感器、检测车辆v的加速度的加速度传感器、检测车辆v的横向加速度的横向加速度传感器(横向g传感器)。
39.在如上述那样构成的车辆v中,使用电波来检测车辆v的周围的目标物的雷达32b能够配置于保险杠的内侧(即,保险杠与车身之间的空间)。在该情况下,从雷达32b射出的电波透过保险杠而向车外释放出。因此,由于保险杠(电波的透过部分)的涂料、厚度、曲率,ecu21对目标物的位置的检测结果产生误差,难以高精度地检测该目标物的位置。因此,本实施方式的车辆v(控制装置1)决定用于校正使用了雷达32b的目标物的位置的检测结果的校正值。通过使用该校正值对目标物的位置的检测结果进行校正,能够高精度地检测该目标物的位置。
40.接下来,参照图2以及图3对本实施方式的车辆v所进行的校正值的决定处理进行说明。图2是表示校正值的决定处理的流程图。图2所示的流程图可以由信息处理部2执行。另外,图3表示进行校正值的决定处理的状况例。在图3中,图示了本车辆v以及其他车辆a,并且例示了使用雷达32b由ecu21检测出的其他车辆a(目标物)的行驶轨迹t1、和使用与ecu21不同的机构而推定出的其他车辆a的行驶轨迹t2。在本实施方式的情况下,ecu21基于雷达32b的检测结果而周期性检测其他车辆a的位置,由ecu21周期性检测出的其他车辆的位置在图3中图示为标绘点p。
41.在s101中,信息处理部2(例如ecu21)判断是否由雷达32b检测到其他车辆a作为本车辆v的周围的目标物。例如,信息处理部2能够基于由雷达32b检测到的目标的形状、行为,判断是否检测到其他车辆a作为该目标物。在由雷达32b没有检测到其他车辆a的情况下反复进行s101,在由雷达32b检测到其他车辆a的情况下进入s102。接着,在s102中,信息处理部2(例如ecu21)基于雷达32b中的检测结果来检测其他车辆a的位置(行驶轨迹t1)。例如,信息处理部2能够基于由雷达32b检测出其他车辆a的方向(方位角)和由雷达32b检测出的到其他车辆a为止的距离,检测其他车辆a的位置(例如为代表位置、中心位置、重心位置)。
42.在s103中,信息处理部2使用与雷达32b(ecu21)不同的机构(即,不使用雷达32b)来推定其他车辆a的位置。此时,信息处理部2可以使用与雷达32b(ecu21)不同的机构,推定s102中的检测时机下的其他车辆a的位置。在本实施方式的情况下,信息处理部2(例如ecu20)使用通信装置26a(ecu26)来推定其他车辆a的位置(行驶轨迹t2)。例如,信息处理部2通过通信装置26a(ecu26)与其他车辆a进行车车间通信,从而获取其他车辆a的行驶信息。
其他车辆a具有与上述的本车辆v的结构相同的结构,其他车辆a的行驶信息能够包含其他车辆a的位置、速度、转向角、旋转运动(横摆率)以及横向加速度中的至少1个信息(也可以必须包含其他车辆a的位置信息)。由此,信息处理部2能够基于通过车车间通信取得的其他车辆a的行驶信息,推定其他车辆a的位置。在此,信息处理部2也可以将其他车辆a的位置推定为相对于本车辆v的相对位置。
43.在s104中,信息处理部2(例如ecu20)计算在s102中检测出的其他车辆a的位置与在s103中推定出的其他车辆a的位置之间的偏差。计算出的偏差与雷达32b的检测角度(方位角)建立对应地存储在存储设备中。该偏差可以计算为其他车辆a相对于本车辆v(雷达32b)的方位误差和/或从本车辆v(雷达32b)到其他车辆a的距离误差。作为一例,图4示出雷达32b的检测角度与方位误差的关系的一例。通过反复进行s101~s104,能够在由雷达32b能够检测的角度范围θ(x[deg]~y[deg])中取得方位误差,如图4所示那样取得检测角度与方位误差的关系。此外,关于距离误差,也与方位误差同样地,通过反复进行s101~s104,能够在由雷达32b能够检测的角度范围θ中取得距离误差,取得检测角度与距离误差的关系。
[0044]
在s105中,信息处理部2(例如ecu20)基于在s104中计算出的偏差,决定用于校正使用了雷达32b的目标物的位置的检测结果的校正值。例如,信息处理部2能够将偏差的倒数决定为校正值。作为一例,在基于图4所示的检测角度与方位误差的关系来决定方位误差的校正值的情况下,信息处理部2通过将方位误差的倒数决定为校正值,能够针对每个检测角度(即,与检测角度相应地)决定方位误差的校正值。另外,距离误差的校正值也能够与方位误差的校正值同样地决定。
[0045]
在s106中,信息处理部2(例如ecu20)判断是否结束校正值的决定处理。例如,信息处理部2在点火关闭(off)的情况下、从乘员(例如驾驶员)接收到结束指示的情况下,能够判断为结束校正值的决定处理。在判断为结束校正值的决定处理之前,反复进行s101~s106。
[0046]
如上所述,在本实施方式中,根据使用雷达32b检测出的其他车辆a的位置与基于通过车车间通信取得的其他车辆a的行驶信息而推定出的其他车辆a的位置的偏差,决定用于校正使用了雷达32b的目标物的检测结果的校正值。然后,使用这样决定的校正值,基于雷达32b的检测结果来校正由ecu21检测的目标物的位置。由此,能够使用雷达32b高精度地检测目标物的位置,因此能够执行车辆v的高精度的控制(例如自动驾驶控制)。
[0047]
<第二实施方式>
[0048]
对本发明的第二实施方式进行说明。在第一实施方式中,说明了在图2的流程图中的s103中,基于通过车车间通信取得的其他车辆a的行驶信息来推定其他车辆a的位置的例子。在本实施方式中,对在s103中基于本车辆v的行驶轨迹t1来推定其他车辆a的位置的例子进行说明。另外,本实施方式是基本承接第一实施方式的实施方式,只要不在以下提及,则车辆、装置的结构(图1)以及处理流程(图2)等与第一实施方式相同。
[0049]
图5是表示在本实施方式的s103中进行的处理(推定其他车辆a的位置的处理)的流程图。图5所示的流程图可以由信息处理部2执行。
[0050]
在s201中,信息处理部2(例如ecu28)取得本车辆v的行驶轨迹t1。例如,信息处理部2能够基于表示本车辆v的行驶状态的信息来取得(计算)本车辆v的行驶轨迹t1。表示本车辆v的行驶状态的信息可以包括由陀螺仪传感器33检测到的本车辆v的旋转运动(横摆
率)、由gps传感器28b检测到的本车辆v的位置、由速度传感器检测到的本车辆v的速度、由加速度传感器检测到的本车辆v的加速度、以及由横向加速度传感器检测到的本车辆v的横向加速度中的至少1个信息。
[0051]
在s202中,信息处理部2(例如ecu20)判断其他车辆a正在行驶的车道。例如,信息处理部2能够基于雷达32b对其他车辆a的检测角度、以及由通信装置28c取得的地图信息,判断其他车辆a正在行驶的车道。在本实施方式的情况下,如图3所示,本车辆v在具有多个车道的道路上行驶,信息处理部2判断其他车辆a是在与本车辆v相同的车道上行驶、还是在与本车辆v的行驶车道相邻的车道上行驶。
[0052]
在s203中,信息处理部2(例如ecu20)基于s202中的判断结果,判断其他车辆a的行驶车道与本车辆v的行驶车道是否相同。在判断为本车辆v的行驶车道与其他车辆a的行驶车道相同的情况下,进入s204。在s204中,如图6所示,信息处理部2基于在s201中取得的本车辆v的行驶轨迹t1,假定其他车辆a沿着本车辆v的行驶轨迹t1行驶,设定其他车辆a的行驶轨迹t2。即,在s204中,信息处理部2将在s201中取得的本车辆v的行驶轨迹t1假定为其他车辆a的行驶轨迹t2。
[0053]
另一方面,在s203中,在判断为本车辆v的行驶车道与其他车辆a的行驶车道不同的情况下,进入s205。在s205中,信息处理部2基于在s201中取得的本车辆v的行驶轨迹t1和车道的宽度w
l
的信息,设定其他车辆a的行驶轨迹t2。例如,如图7所示,假设其他车辆a在与本车辆v的行驶车道相邻的车道上行驶。在该情况下,信息处理部2能够将通过使在s201中取得的本车辆v的行驶轨迹t1横移车道的宽度w
l
而得到的轨迹设定(假定)为其他车辆a的行驶轨迹t2。在此,车道的宽度w
l
的信息例如能够从经由通信装置28c取得的地图信息得到。
[0054]
在s206中,信息处理部2基于在s204或s205中设定的其他车辆a的行驶轨迹t2来推定其他车辆a的位置。此时,信息处理部2可以推定s102中的检测时机下的其他车辆a的位置。
[0055]
如上所述,在本实施方式中,基于本车辆v的行驶轨迹t1来设定(假定)其他车辆a的行驶轨迹t2。由此,例如即使在其他车辆a不具备车车间通信的功能的情况等无法取得其他车辆a的行驶信息的情况下,也能够推定其他车辆a的位置。
[0056]
<其他实施方式>
[0057]
在上述实施方式中,使用在本车辆v的后方行驶的其他车辆a,决定了用于校正使用了雷达32b的目标物的位置的检测结果的校正值,但不限于此,也可以使用在本车辆v的前方行驶的其他车辆来决定该校正值。另外,在本车辆v设置有多个雷达32b的情况下,也可以针对每个雷达32b决定校正值。并且,在决定校正值时,不限于其他车辆a,只要预先掌握了位置,则可以代替其他车辆a而使用任意的目标物。
[0058]
<实施方式的总结>
[0059]
1.上述实施方式的车载装置(例如1)具备:
[0060]
检测机构(例如21、32b),其使用电波来检测本车辆(例如v)的周围的目标物的位置;
[0061]
推定机构(例如20),其使用与所述检测机构不同的机构(例如26、28)来推定所述目标物的位置;以及
[0062]
决定机构(例如20),其基于由所述检测机构检测出的所述目标物的位置与由所述
推定机构推定出的所述目标物的位置之间的偏差,决定用于校正所述检测机构的检测结果的校正值。
[0063]
根据该实施方式,通过推定目标物的位置,能够容易且高精度地决定用于校正检测机构的检测结果的校正值,因此能够高精度地进行使用了电波的目标物的位置的检测。
[0064]
2.在上述实施方式中,
[0065]
所述推定机构使用与所述检测机构不同的机构,推定所述检测机构的检测时机下的所述目标物的位置。
[0066]
根据该实施方式,能够更高精度地决定校正值。
[0067]
3.在上述实施方式中,
[0068]
所述检测机构将其他车辆(例如a)的位置检测为所述目标物,
[0069]
所述车载装置还具备通过车车间通信来取得所述其他车辆的行驶信息的通信机构(例如26、26a),
[0070]
所述推定机构基于由所述通信机构取得的所述行驶信息来推定所述其他车辆的位置。
[0071]
根据该实施方式,能够高精度地推定其他车辆的位置,因此能够更准确地进行检测机构(雷达)的校正。
[0072]
4.在上述实施方式中,
[0073]
所述行驶信息包括所述其他车辆的位置、速度、转向角、旋转运动以及横向加速度中的至少1个。
[0074]
根据该实施方式,能够更高精度地推定其他车辆的位置。
[0075]
5.在上述实施方式中,
[0076]
所述检测机构将其他车辆(例如a)的位置检测为所述目标物,
[0077]
所述车载装置还具备取得所述本车辆的行驶轨迹(例如t1)的取得机构(例如28),
[0078]
所述推定机构基于由所述取得机构取得的所述本车辆的行驶轨迹来假定所述其他车辆的行驶轨迹(例如t2),基于假定的所述其他车辆的行驶轨迹来推定所述其他车辆的位置。
[0079]
根据该实施方式,能够高精度地推定其他车辆的位置,因此能够更准确地进行检测机构(雷达)的校正。
[0080]
6.在上述实施方式中,
[0081]
在判断为所述其他车辆在与所述本车辆相同的车道上行驶的情况下,所述推定机构将所述本车辆的行驶轨迹假定为所述其他车辆的行驶轨迹来推定所述其他车辆的位置。
[0082]
根据该实施方式,能够高精度地推定其他车辆的位置。
[0083]
7.在上述实施方式中,
[0084]
在判断为所述其他车辆在与所述本车辆的行驶车道相邻的车道上行驶的情况下,所述推定机构将基于所述本车辆的行驶轨迹和车道的宽度而算出的轨迹假定为所述其他车辆的行驶轨迹来推定所述其他车辆的位置。
[0085]
根据该实施方式,能够高精度地推定其他车辆的位置。
[0086]
8.在上述实施方式中,
[0087]
所述检测机构包括配置在所述本车辆的保险杠与车身之间的雷达(例如43b)。
[0088]
根据该实施方式,由于雷达配置在保险杠的内侧,因此能够扩大车辆设计的自由度。
[0089]
本发明并不限定于上述实施方式,能够在不脱离本发明的精神和范围的情况下进行各种变更和变形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1