车辆的控制装置的制作方法
1.本发明涉及一种具备发动机、电动机、使发动机与电动机之间的连结断开的离合器、将驱动力向驱动轮传递的附带锁止离合器的流体式传动装置的车辆的控制装置。
背景技术:
2.熟知一种车辆的控制装置,所述车辆具备发动机、以能够动力传递的方式被连结于所述发动机和驱动轮之间的动力传递路径上的电动机、被设置于所述动力传递路径上并且通过被释放而断开所述发动机与所述电动机之间的连结的离合器、构成所述动力传递路径的一部分并且将来自所述发动机以及所述电动机的驱动力向所述驱动轮进行传递的附带锁止离合器的流体式传动装置。例如,在专利文献1中所记载的混合动力车辆的控制装置就是如此。在该专利文献1中,公开了如下的情况,即:在仅通过电动机的输出就能够提供请求驱动转矩的范围的情况下,在使离合器释放的状态下实施电机行驶的情况;此外,当在电机行驶中由于请求驱动转矩增大从而判断出存在发动机的起动请求的情况下,通过将离合器向卡合进行控制以获得用于将发动机的起动所需的转矩向发动机侧进行传递的离合器转矩,从而将发动机发动而使发动机起动的情况;此外,在该起动方法中,为了抑制驱动转矩的下降,从而使为了消除伴随着离合器卡合时的发动机发动所产生的反作用力转矩而所需的电动机转矩量被加在使用于驱动转矩的电机行驶用的电动机转矩量上的情况;换个角度来看,在电机行驶中以备于发动机的起动而需要预先保证相当于为了消除反作用力转矩而所需的电动机转矩量的、发动机的起动所需的电动机转矩量的情况。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2015
‑
51707号公报
技术实现要素:
6.发明所要解决的课题
7.可是,可输出的电动机的最大转矩依赖于电动机的转速。另一方面,当处于锁止离合器被释放的状态时,与处于锁止离合器被卡合的状态时相比,由于向流体式传动装置输入的输入转矩的变动而电动机的转速的变动易于变大。因此,即使在保证了为了消除伴随着离合器卡合时的发动机发动所产生的反作用力转矩而所需的电动机转矩量的状态下开始了发动机的起动,也存在如下可能性,即,当在发动机的起动过渡中由于电动机的转速的上升而可输出的电动机的最大转矩减少时,会无法保证为了消除反作用力转矩而所需的电动机转矩量即发动机的起动所需的电动机转矩量,从而驾驶性能恶化。
8.本发明是以以上的情况为背景而完成的发明,其目的在于,提供一种在包括发动机的起动过渡中在内的发动机的起动时易于保证发动机的起动所需的电动机转矩量从而能够抑制驾驶性能的恶化的车辆的控制装置。
9.用于解决课题的手段
10.第一发明的主旨在于一种车辆的控制装置,所述车辆具备:(a)发动机;电动机,其以能够进行动力传递的方式被连结于所述发动机和驱动轮之间的动力传递路径;离合器,其被设置于所述动力传递路径上,并通过被释放从而断开所述发动机与所述电动机之间的连结;附带锁止离合器的流体式传动装置,其构成所述动力传递路径的一部分,并且将来自所述发动机以及所述电动机的驱动力向所述驱动轮传递,所述车辆的控制装置包括:(b)电动机转速预测部,其在释放了所述离合器的状态下仅将所述电动机设为驱动力源而行驶的电机行驶中,根据所述锁止离合器的工作状态,而对预读了从当前时间点起的变化的所述电动机的转速的预测值进行计算;(c)电动机转矩预测部,其使用所述电动机的转速的预测值,而对可输出的所述电动机的最大转矩的预测值进行计算;(d)起动请求判断部,其使用所述电动机的最大转矩的预测值,而对所述发动机的起动请求的有无进行判断;(e)起动控制部,其在判断出存在所述发动机的起动请求的情况下,在将所述离合器向卡合进行控制的同时使所述发动机的起动所需的转矩从所述电动机输出,从而起动所述发动机。
11.此外,第二发明为,在所述第一发明所述的车辆的控制装置中,在处于所述锁止离合器被释放的状态的情况下,所述电动机转速预测部基于所述流体式传动装置的输出转速、驾驶员对所述车辆的驱动请求量和所述流体式传动装置的预定的工作特性,而对所述电动机的转速的预测值进行计算。
12.此外,第三发明为,在所述第一发明或第二发明所述的车辆的控制装置中,在处于所述锁止离合器被卡合的状态的情况下,所述电动机转速预测部将相对于所述流体式传动装置的输出转速上升了所述发动机的起动过程中的所述锁止离合器的滑动转速量而得到的值作为所述电动机的转速的预测值进行计算。
13.此外,第四发明为,在所述第一发明至第三发明中的任意一个发明所述的车辆的控制装置中,所述电动机转矩预测部基于相对于所述电动机授受电力的蓄电装置的输出限制和所述电动机的转速的预测值,而对所述电动机的最大转矩的预测值进行计算。
14.此外,第五发明为,在所述第一发明至第四发明中的任意一个发明所述的车辆的控制装置中,所述起动请求判断部基于驾驶员对所述车辆的驱动请求量是否超过了从所述电动机的最大转矩的预测值减去所述发动机的起动所需的转矩而得到的起动判断值,而对是否存在所述发动机的起动请求进行判断。
15.此外,第六发明为,在所述第五发明所述的车辆的控制装置中,在判断出存在所述发动机的起动请求的情况下,所述起动控制部在至完成所述发动机的起动为止的期间内,将判断为存在所述发动机的起动请求的时间点的所述起动判断值,设为在所述电机行驶的控制中所使用的所述驱动请求量的上限值。
16.此外,第七发明为,在所述第一发明至第四发明中的任意一个发明所述的车辆的控制装置中,所述起动请求判断部基于驾驶员对所述车辆的驱动请求量是否超过了从所述电动机的最大转矩的预测值减去所述发动机的起动所需的转矩以及所述电动机的最大转矩相对于所述电动机的转速的预测值的计算精度的富余量所得到的起动判断值,而对是否存在所述发动机的起动请求进行判断。
17.此外,第八发明为,在所述第七发明所述的车辆的控制装置中,在判断出存在所述发动机的起动请求的情况下,所述起动控制部在至完成所述发动机的起动为止的期间内,将在判断为存在所述发动机的起动请求的时间点的所述起动判断值上加上所述电动机的
最大转矩的富余量而得到的值,设为在所述电机行驶的控制中所使用的所述驱动请求量的上限值。
18.发明效果
19.根据所述第一发明,由于在电机行驶中,根据锁止离合器的工作状态来计算出预读了从当前时间点起的变化的电动机的转速的预测值,并且使用该电动机的转速的预测值,来计算出可输出的电动机的最大转矩的预测值,并且使用该电动机的最大转矩的预测值来判断发动机的起动请求的有无,因此即使在将来可输出的电动机的最大转矩与发动机的起动开始时可输出的电动机的最大转矩相比而降低,也能够不管锁止离合器的工作状态如何,而在易于保证为了消除发动机的起动过渡中的伴随着离合器卡合时的发动机发动所产生的反作用力转矩而所需的电动机转矩量的状态下开始发动机的起动。因此,在包括发动机的起动过渡中在内的发动机的起动时,能够易于保证发动机的起动所需的电动机转矩量从而抑制驾驶性能的恶化。
20.此外,根据所述第二发明,由于在处于锁止离合器被释放的状态的情况下,基于流体式传动装置的输出转速、驱动请求量和流体式传动装置的预定的工作特性来计算出电动机的转速的预测值,因此使用处于锁止离合器被释放的状态下的电动机的转速的预测值,来适当地计算出可输出的电动机的最大转矩的预测值。由此,即使如在处于在发动机的起动过渡中由于电动机的转速的上升而可输出的电动机的最大转矩易于减少那样的锁止离合器被释放的状态下,也能够在易于保证为了消除发动机的起动过渡中的反作用力转矩而所需的电动机转矩量的状态下开始发动机的起动。
21.此外,根据所述第三发明,由于在处于锁止离合器被卡合的状态的情况下,将相对于流体式传动装置的输出转速上升了发动机的起动过程中的锁止离合器的滑动转速量而得到的值作为电动机的转速的预测值进行计算,因此使用处于锁止离合器被卡合的状态下的电动机的转速的预测值,来适当地计算出可输出的电动机的最大转矩的预测值。由此,即使在发动机的起动过程中处于如被进行滑动工作那样的锁止离合器被卡合的状态下,也能够在易于保证为了消除发动机的起动过渡中的反作用力转矩而所需的电动机转矩量的状态下开始发动机的起动。
22.此外,根据所述第四发明,由于基于蓄电装置的输出限制和电动机的转速的预测值而计算出可输出的电动机的最大转矩的预测值,因此,适当地计算出电动机的最大转矩的预测值。
23.此外,根据所述第五发明,由于基于驱动请求量是否超过了从可输出的电动机的最大转矩的预测值减去发动机的起动所需的转矩而得到的起动判断值来判断是否存在发动机的起动请求,因此,能够在易于保证为了消除发动机的起动过渡中的反作用力转矩而所需的电动机转矩量的状态下适当地开始发动机的起动。
24.此外,根据所述第六发明,由于在判断出存在发动机的起动请求的情况下,在至完成发动机的起动为止的期间内,将判断为存在发动机的起动请求的时间点的起动判断值设为在电机行驶的控制中所使用的驱动请求量的上限值,因此即使实际的驱动请求量与判断为存在发动机的起动请求的时间点相比而增大,也能够在易于保证为了消除发动机的起动过渡中的反作用力转矩而所需的电动机转矩量的状态下执行发动机的起动。
25.此外,根据所述第七发明,由于基于驱动请求量是否超过了从可输出的电动机的
最大转矩的预测值减去发动机的起动所需的转矩以及电动机的最大转矩的富余量而得到的起动判断值来判断是否存在发动机的起动请求,因此,能够在适当地保证为了消除发动机的起动过渡中的反作用力转矩而所需的电动机转矩量的状态下适当地开始发动机的起动。
26.此外,根据所述第八发明,由于在判断出存在发动机的起动请求的情况下,在至完成发动机的起动为止的期间内,将在判断为存在发动机的起动请求的时间点的起动判断值上加上电动机的最大转矩的富余量而得到的值设为在电机行驶的控制中所使用的驱动请求量的上限值,因此,能够在适当地保证消除发动机的起动过渡中的反作用力转矩而所需的电动机转矩量的状态下执行发动机的起动,并且易于通过电动机的最大转矩的富余量来满足驱动请求量。
附图说明
27.图1为对应用本发明的车辆的概要结构进行说明的图,且为对用于车辆中的各种控制的控制功能以及控制系统的主要部分进行说明的图。
28.图2为对变矩器状态下的行驶时的预测可输出电机转矩的一个示例进行说明的图。
29.图3为对锁止状态下的行驶时的预测可输出电机转矩的一个示例进行说明的图。
30.图4为表示预先规定了速度比与转矩比、效率以及容量因数各自之间的关系的变矩器的特性曲线的一个示例的图。
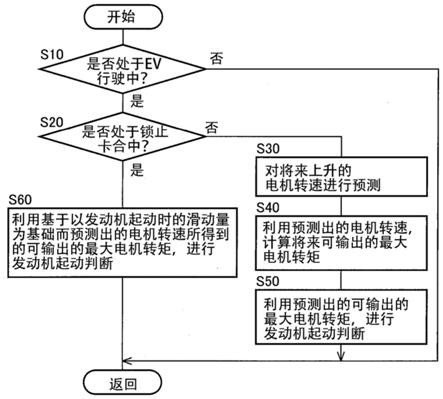
31.图5为对电子控制装置的控制工作的主要部分进行说明的流程图,且为对用于在包括发动机的起动过渡中在内的发动机的起动时易于保证所需起动转矩量从而抑制驾驶性能的恶化的控制工作进行说明的流程图。
32.图6为考虑到预测偏差余量而执行了图5的流程图所示的控制工作的情况下的时序图,且为表示变矩器状态下的行驶时的情况的一个示例的图。
33.图7为考虑到预测偏差余量而执行了图5的流程图所示的控制工作的情况的时序图,且为表示锁止状态下的行驶时的情况的一个示例的图。
具体实施方式
34.以下,参照附图,对本发明的实施例进行详细的说明。
35.[实施例1]
[0036]
图1为对应用本发明的车辆10的概要结构进行说明的图,且为对用于车辆10中的各种控制的控制功能以及控制系统的主要部分进行说明的图。在图1中,车辆10为,具备作为行驶用的驱动力源的发动机12以及电动机mg的混合动力车辆。此外,车辆10具备驱动轮14、以及被设置于发动机12与驱动轮14之间的动力传递路径上的动力传递装置16。
[0037]
动力传递装置16在被安装在车身上的作为非旋转部件的外壳18内,具备被设置于发动机12与驱动轮14之间的动力传递路径上的断接用离合器k0、经由断接用离合器k0而与发动机12连结的变矩器20、与变矩器20连结的自动变速器22等。变矩器20以及自动变速器22分别构成发动机12与驱动轮14之间的动力传递路径的一部分。自动变速器22被设置于变矩器20与驱动轮14之间的动力传递路径上。此外,动力传递装置16具备与自动变速器22的
输出旋转部件即变速器输出轴24连结的传动轴26、与该传动轴26连结的差速器齿轮28、与该差速器齿轮28连结的一对驱动轴30等。此外,动力传递装置16具备将发动机12和断接用离合器k0连结的发动机连结轴32、将断接用离合器k0和变矩器20连结的电动机连结轴34等。
[0038]
电动机mg在外壳18内以能够动力传递的方式与电动机连结轴34连结。电动机mg以能够动力传递的方式与发动机12和驱动轮14之间的动力传递路径、尤其是与断接用离合器k0和变矩器20之间的动力传递路径进行连结。也就是说,电动机mg在不经由断接用离合器k0的条件下以能够动力传递的方式与变矩器20、自动变速器22连结。换个角度来说,变矩器20以及自动变速器22各自构成了电动机mg与驱动轮14之间的动力传递路径的一部分。变矩器20以及自动变速器22分别将来自发动机12以及电动机mg的各个驱动力源的驱动力向驱动轮14进行传递。
[0039]
变矩器20具备与电动机连结轴34连结的泵轮20a、以及与自动变速器22的输入旋转部件即变速器输入轴36连结的涡轮20b。泵轮20a经由断接用离合器k0而与发动机12连结,并且,直接与电动机mg连结。泵轮20a为变矩器20的输入部件,涡轮20b为变矩器20的输出部件。电动机连结轴34也为变矩器20的输入旋转部件。变速器输入轴36也为通过涡轮20b而旋转驱动的与涡轮轴一体地形成的变矩器20的输出旋转部件。变矩器20为,经由在变矩器20内流通的流体而将来自各个驱动力源(发动机12、电动机mg)的驱动力向变速器输入轴36进行传递的流体式传动装置。
[0040]
在断接用离合器k0的卡合状态下,经由发动机连结轴32而使泵轮20a和发动机12一体旋转。即,断接用离合器k0通过卡合从而以能够动力传递的方式对发动机12和驱动轮14进行连结。另一方面,在断接用离合器k0的释放状态下,发动机12与泵轮20a之间的动力传递被切断。即,断接用离合器k0通过释放从而断开发动机12与驱动轮14之间的连结。由于电动机mg被连结于泵轮20a,因此,断接用离合器k0作为被设置于发动机12与电动机mg之间的动力传递路径上并且将该动力传递路径断开或连接的离合器、即将发动机12与电动机mg断开或连接的离合器而发挥功能。也就是说,断接用离合器k0为,通过被卡合从而对发动机12和电动机mg进行连结,并通过被释放从而断开发动机12与电动机mg之间的连结的离合器。
[0041]
在动力传递装置16中,从发动机12输出的动力在断接用离合器k0被卡合的情况下从发动机连结轴32依次经由断接用离合器k0、电动机连结轴34、变矩器20、自动变速器22、传动轴26、差速器齿轮28、以及驱动轴30等而向驱动轮14传递。此外,无论断接用离合器k0的工作状态如何,从电动机mg输出的动力都从电动机连结轴34依次经由变矩器20、自动变速器22、传动轴26、差速器齿轮28、以及驱动轴30等而向驱动轮14被传递。对于所述动力而言,在未进行特别区分的情况下,转矩或力也为相同的意思。
[0042]
发动机12为汽油发动机或柴油发动机等公知的内燃机。发动机12通过利用后述的电子控制装置90而对车辆10所具备的包括节气门作动器、燃料喷射装置、点火装置等在内的发动机控制装置50进行控制,从而控制作为发动机12的输出转矩的发动机转矩te。
[0043]
电动机mg为,具有作为使从电力产生机械动力的发动机的功能以及作为使从机械动力产生电力的发电机的功能的旋转电气设备、即所谓电动发电机。电动机mg经由车辆10所具备的逆变器52而与车辆10所具备的蓄电池54连接。电动机mg中,通过利用后述的电子
控制装置90而控制逆变器52,从而控制作为电动机mg的输出转矩的电机转矩tm。在例如电动机mg的旋转方向为与发动机12的运转时相同的旋转方向的正旋转的情况下,电机转矩tm在成为加速侧的正转矩下为动力运行转矩,在成为减速侧的负转矩下为再生转矩。具体而言,电动机mg代替发动机12或者在发动机12的基础上,通过经由逆变器52而从蓄电池54供给的电力来产生行驶用的动力。此外,电动机mg通过发动机12的动力、从驱动轮14侧输入的被驱动力而实施发电。通过电动机mg的发电而产生的电力经由逆变器52而被积蓄到蓄电池54中。蓄电池54为相对于电动机mg来授受电力的蓄电装置。对于所述电力而言,在未进行特别区分的情况下,电能也是相同的意思。
[0044]
自动变速器22为,具备例如未图示的一组或多组的行星齿轮装置和多个卡合装置cb的公知的行星齿轮式的自动变速器。卡合装置cb为,例如由通过液压作动器而被按压的多片式或者单片式的离合器、制动器、通过液压作动器而被收紧的带式制动器等构成的液压式的摩擦卡合装置。卡合装置cb分别通过利用从车辆10所具备的液压控制回路56供给的被调压了的液压而使作为各自的转矩容量的卡合转矩发生变化,从而对处于卡合或释放等状态的工作状态进行切换。
[0045]
自动变速器22为,通过卡合装置cb中的任意一个卡合装置被卡合,从而形成变速比(也称为齿轮比)γat(=at输入转速ni/at输出转速no)不同的多个变速级(也称为齿轮级)中的任意一个齿轮级的有级变速器。自动变速器22通过后述的电子控制装置90,根据驾驶员(=驾驶者)的加速器操作或车速v等而对形成的齿轮级进行切换,即选择性地形成多个齿轮级。at输入转速ni为变速器输入轴36的转速,且为自动变速器22的输入转速。at输入转速ni也为变矩器20的输出旋转部件的转速,并与作为变矩器20的输出转速的涡轮转速nt同值。at输入转速ni能够由涡轮转速nt表示。at输出转速no为变速器输出轴24的转速,且为自动变速器22的输出转速。
[0046]
断接用离合器k0为,例如由通过作动器而被按压的多片式或者单片式的离合器构成的湿式或干式的摩擦卡合装置。断接用离合器k0通过从液压控制回路56供给的被调压了的k0液压而使作为断接用离合器k0的转矩容量的k0离合器转矩tk0发生变化,从而对工作状态进行切换。
[0047]
变矩器20具备对泵轮20a和涡轮20b进行连结、即对变矩器20的输入输出旋转部件进行连结的作为直连离合器的锁止离合器lu。变矩器20为附带锁止离合器lu的流体式传动装置。锁止离合器lu通过从液压控制回路56供给的被调压了的lu液压而使作为锁止离合器lu的转矩容量的lu离合器转矩tlu发生变化,从而对工作状态进行切换。
[0048]
作为锁止离合器lu的工作状态,具有锁止离合器lu被释放的状态即完全释放状态、锁止离合器lu伴有滑动而被卡合的状态即滑动状态、以及锁止离合器lu被卡合的状态即完全卡合状态。通过锁止离合器lu被设为完全释放状态,从而变矩器20被设为可获得转矩放大作用的变矩器状态。此外,通过锁止离合器lu被设为完全卡合状态,从而变矩器20被设为泵轮20a以及涡轮20b一体旋转的锁止状态。在变矩器20的锁止状态中,驱动力源(发动机12、电动机mg)的动力在不经由变矩器20内的流体的条件下向变速器输入轴36进行传递。此外,在锁止离合器lu的滑动状态下,锁止离合器lu被进行滑动工作,以使锁止离合器lu中的滑动量nslp成为目标滑动量nslptgt。滑动量nslp为锁止离合器lu的滑动转速,且为作为锁止离合器lu的输入输出转速差的输入输出旋转部件间的差转速(=泵转速np
‑
涡轮转速
nt)。例如,当车辆10处于驱动状态时,通过锁止离合器lu被设为滑动状态,从而与处于完全释放状态相比,抑制了发动机转速ne的上升,或者,与处于完全卡合状态相比,抑制了车内隆隆声等。泵转速np为变矩器20的输入转速,且为作为变矩器20的输入旋转部件的电动机连结轴34的转速。泵转速np与作为电动机mg的转速的电机转速nm同值。泵转速np能够由电机转速nm表示。发动机转速ne为发动机12的转速。
[0049]
车辆10具备作为机械式的机油泵的mop58、作为电动式的机油泵的eop60、泵用电机62等。mop58被连结于泵轮20a,并由驱动力源(发动机12、电动机mg)旋转驱动,而喷出在动力传递装置16中所使用的工作油oil。泵用电机62为用于对eop60进行旋转驱动的eop60专用的电机。eop60通过泵用电机62而被旋转驱动,从而喷出工作油oil。mop58或eop60所喷出的工作油oil向液压控制回路56供给。液压控制回路56供给以mop58和/或eop60所喷出的工作油oil为基础而分别进行了调压的卡合装置cb的液压、k0液压、lu液压等。在变矩器20内流通的流体为该工作油oil。
[0050]
车辆10还具备电子控制装置90,电子控制装置90包括与发动机12的起动控制等相关联的车辆10的控制装置。电子控制装置90被构成为,例如包括具备cpu、ram、rom、输入输出接口等的所谓微型计算机,cpu通过在利用ram的临时存储功能的同时按照预先被存储于rom中的程序来实施信号处理,从而执行车辆10的各种控制。电子控制装置90被构成为,根据需要而包括发动机控制用、电动机控制用、液压控制用等的各计算机。
[0051]
对于电子控制装置90,分别供给基于由车辆10所具备的各种传感器等(例如发动机转速传感器70、涡轮转速传感器72、输出转速传感器74、电机转速传感器76、加速器开度传感器78、节气门开度传感器80、制动器开关82、蓄电池传感器84、油温传感器86等)检测出的检测值而得到的各种信号等(例如发动机转速ne、与at输入转速ni同值的涡轮转速nt、对应于车速v的at输出转速no、与泵转速np同值的电机转速nm、表示驾驶员的加速操作的大小的驾驶员的加速器操作量即加速器开度θacc、作为电子节气门的开度的节气门开度θth、表示用于使车轮制动器进行工作的制动踏板正在由驾驶员进行操作的状态的信号即制动器开启信号bon、蓄电池54的蓄电池温度thbat、蓄电池充放电电流ibat、蓄电池电压vbat、液压控制回路56内的工作油oil的温度即工作油温thoil等)。
[0052]
从电子控制装置90向车辆10所具备的各个装置(例如发动机控制装置50、逆变器52、液压控制回路56、泵用电机62等)分别输出各种指令信号(例如用于对发动机12进行控制的发动机控制指令信号se、用于对电动机mg进行控制的电动机控制指令信号sm、用于对卡合装置cb的工作状态进行控制的at液压控制指令信号sat、用于对断接用离合器k0的工作状态进行控制的k0液压控制指令信号sko、用于对锁止离合器lu的工作状态进行控制的lu液压控制指令信号slu、用于对eop60的工作状态进行控制的eop控制指令信号seop等)。
[0053]
为了实现车辆10中的各种控制,电子控制装置90具备混合动力控制单元即混合动力控制部92、变速控制单元即变速控制部94、以及锁止离合器控制单元即锁止离合器控制部96。
[0054]
混合动力控制部92包括作为对发动机12的工作进行控制的发动机控制单元即发动机控制部92a的功能、以及作为经由逆变器52而对电动机mg的工作进行控制的电动机控制单元即电动机控制部92b的功能,通过这些控制功能来执行由发动机12以及电动机mg所实施的混合动力驱动控制等。
[0055]
混合动力控制部92通过将加速器开度θacc以及车速v应用到例如驱动请求量映射图中,从而对由驾驶员对于车辆10的驱动请求量进行计算。所述驱动请求量映射图为,预先被实验性或设计性地求出并被存储的关系即被预先规定的关系。所述驱动请求量为例如驱动轮14的请求驱动转矩trdem。在本实施例中,将由驾驶员对于车辆10的请求驱动转矩trdem称为驾驶员请求转矩trdemd。换个角度来看,请求驱动转矩trdem[nm]为当时的车速v下的请求驱动功率prdem[w]。作为所述驱动请求量,也能够使用驱动轮14的请求驱动力frdem[n]、变速器输出轴24的请求at输出转矩等。在所述驱动请求量的计算中,也可以代替车速v而使用at输出转速no等。
[0056]
混合动力控制部92考虑到传递损失、辅助设备负荷、自动变速器22的变速比γat、蓄电池54的可充电电力win、可放电电力wout等,而输出对发动机12进行控制的发动机控制指令信号se和对电动机mg进行控制的电动机控制指令信号sm,以实现请求驱动功率prdem。发动机控制指令信号se为,例如输出当时的发动机转速ne下的发动机转矩te的发动机12的功率即发动机功率pe的指令值。电动机控制指令信号sm为,例如输出当时的电机转速nm下的电机转矩tm的电动机mg的消耗电力wm的指令值。
[0057]
蓄电池54的可充电电力win为,对蓄电池54的输入电力的限制进行规定的可输入的最大电力,并表示蓄电池54的输入限制。蓄电池54的可放电电力wout为,对蓄电池54的输出电力的限制进行规定的可输出的最大电力,并表示蓄电池54的输出限制。蓄电池54的可充电电力win、可放电电力wout基于例如蓄电池温度thbat以及蓄电池54的充电状态值soc[%],由电子控制装置90进行计算。蓄电池54的充电状态值soc为表示蓄电池54的充电状态的值,且基于例如蓄电池充放电电流ibat以及蓄电池电压vbat等,由电子控制装置90进行计算。
[0058]
混合动力控制部92在仅通过电动机mg的输出就能提供请求驱动转矩trdem的范围的情况下,将行驶模式设为电机行驶(=ev行驶)模式。在ev行驶模式下,混合动力控制部92实施在将断接用离合器k0释放的状态下仅将电动机mg设为驱动力源而行驶的ev行驶。另一方面,当请求驱动转矩trdem在至少不使用发动机12的输出则不能提供的范围的情况下,混合动力控制部92将行驶模式设为发动机行驶模式即混合动力行驶(=hv行驶)模式。在hv行驶模式下,混合动力控制部92实施在将断接用离合器k0卡合的状态下至少将发动机12设为驱动力源而行驶的发动机行驶即hv行驶。另一方面,混合动力控制部92即使在仅通过电动机mg的输出就能提供请求驱动转矩trdem的范围的情况下,也会在蓄电池54的充电状态值soc小于被预先规定的发动机起动阈值的情况或需要进行发动机12等的暖机的情况等下,使hv行驶模式成立。所述发动机起动阈值为,用于对处于需要强制性地起动发动机12而对蓄电池54进行充电的充电状态值soc的情况进行判断的被预先规定的阈值。以此方式,混合动力控制部92基于请求驱动转矩trdem等,而在hv行驶中使发动机12自动停止、或者在该发动机停止后使发动机12重新起动、或者在ev行驶中使发动机12起动,从而对ev行驶和hv行驶进行切换。
[0059]
混合动力控制部92包括作为对发动机12的起动请求的有无进行判断的起动请求判断单元即起动请求判断部92c的功能。起动请求判断部92c在ev行驶模式时,基于与仅通过电动机mg的输出就能够提供请求驱动转矩trdem的范围相比是否有所增大、或是否需要发动机12等的暖机、或是否需要对蓄电池54进行充电等,而对是否存在发动机12的起动请
求进行判断。
[0060]
混合动力控制部92包括作为起动控制单元即起动控制部92d的功能,所述起动控制单元在由起动请求判断部92c在ev行驶模式时判断出存在发动机12的起动请求的情况下,执行将发动机12起动的发动机12的起动控制。起动控制部92d在发动机12的起动控制时,通过将被释放的状态的断接用离合器k0向卡合进行控制以获得用于将发动机12的起动所需的转矩向发动机12侧传递的k0离合器转矩tk0,从而将用于将发动机12发动的k0液压控制指令信号sko向液压控制回路56输出。与发动机12的发动联动地,起动控制部92d将用于开始燃料供给、发动机点火等的发动机控制指令信号se向发动机控制装置50输出。发动机12的起动所需的转矩相当于发动机起动时的伴随着断接用离合器k0的卡合的反作用力转矩即发动机起动反作用力转矩trfst。该发动机起动反作用力转矩trfst使由于发动机起动中的惯性而引起的车辆10的牵引感、即驱动转矩tr的下降产生。起动控制部92d在发动机12的起动控制时,向逆变器52输出用于将为了消除发动机起动反作用力转矩trfst所需的电机转矩tm即所需起动转矩tst从电动机mg输出的电动机控制指令信号sm,以减少由于发动机起动反作用力转矩trfst而引起的牵引感。也就是说,发动机12的起动所需的转矩为,发动机12的发动所需的k0离合器转矩tk0,并且相当于从电动机mg侧经由断接用离合器k0而流向发动机12侧的所需起动转矩tst。发动机12的起动所需的转矩为,基于例如发动机12的规格等而被预先规定的发动机发动转矩。以此方式,起动控制部92d在判断出存在发动机12的起动请求的情况下,在将断接用离合器k0向卡合进行控制的同时使发动机12的起动所需的转矩从电动机mg输出,从而将发动机12起动。
[0061]
变速控制部94利用例如作为被预先规定的关系的变速映射图而实施自动变速器22的变速判断,并且根据需要将用于执行自动变速器22的变速控制的at液压控制指令信号sat向液压控制回路56输出。所述变速映射图为,在将例如车速v以及请求驱动转矩trdem设为变量的二维坐标上具有用于对自动变速器22的变速进行判断的变速线的预定的关系。在所述变速映射图中,既可以代替车速v而使用at输出转速no等,此外,也可以代替请求驱动转矩trdem而使用请求驱动力frdem、加速器开度θacc、节气门开度θth等。
[0062]
锁止离合器控制部96对锁止离合器lu的工作状态进行控制。例如,锁止离合器控制部96利用作为被预先规定的关系的锁止区域线图,而实施将锁止离合器lu的工作状态设为某种状态的判断,并将用于实现判断出的状态的lu液压控制指令信号slu向液压控制回路56输出。所述锁止区域线图为,在将例如车速v以及加速器开度θacc设为变量的二维坐标上具有锁止关闭区域、滑动工作区域、锁止开启区域的预定的关系。在所述锁止区域线图中,既可以代替车速v而使用at输出转速no等,此外,也可以代替加速器开度θacc而使用请求驱动转矩trdem、请求驱动力frdem、节气门开度θth等。
[0063]
锁止离合器控制部96在锁止离合器lu被设为完全卡合状态时,并且在执行由起动控制部92d实施的发动机12的起动控制的情况下,向液压控制回路56输出用于使锁止离合器lu进行滑动工作以在发动机12的起动控制的执行中使锁止离合器lu中的滑动量nslp成为起动时目标滑动量nslptgtst的lu液压控制指令信号slu。起动时目标滑动量nslptgtst为,用于抑制例如发动机起动冲击的被预先规定的值。此外,锁止离合器控制部96在锁止离合器lu被设为滑动状态时的滑动量nslp小于起动时目标滑动量nslptgtst时,并且在执行由起动控制部92d实施的发动机12的起动控制的情况下,向液压控制回路56输出用于使锁
止离合器lu进行滑动工作以在发动机12的起动控制的执行中使锁止离合器lu中的滑动量nslp成为起动时目标滑动量nslptgtst的lu液压控制指令信号slu。
[0064]
在此,在ev行驶中的发动机12的起动控制中,除了ev行驶用的电机转矩tm量、也就是产生驱动转矩tr的电机转矩tm量之外,还从电动机mg输出所需起动转矩tst量。因此,在ev行驶中,以备于发动机12的起动控制,需要预先保证所需起动转矩tst量。因此,在仅通过电动机mg的输出就提供请求驱动转矩trdem的范围成为,对于可输出的电动机mg的最大转矩而减去了所需起动转矩tst量所得到的转矩范围。可输出的电动机mg的最大转矩为,根据蓄电池54的可放电电力wout而能够输出的最大的电机转矩tm,在本实施例中,将可输出的电动机mg的最大转矩称为可输出电机转矩tmmax。
[0065]
可是,可输出电机转矩tmmax依赖于电机转速nm。因此,存在有在发动机12的起动控制的过渡中,由于电机转速nm的上升而可输出电机转矩tmmax减少的情况。于是,即使在保证了所需起动转矩tst量的状态下开始了发动机12的起动控制,也存在如下可能性,即,在起动控制的过渡中可输出电机转矩tmmax减少的情况下,会无法保证所需起动转矩tst量,从而驾驶性能恶化。这样的现象在如例如变矩器20被设为变矩器状态这样的电机转速nm的变动变大的行驶时显著出现。
[0066]
因此,为了抑制如上所述的发动机起动时的驾驶性能的恶化,电子控制装置90在ev行驶中,利用预读了从当前时间点起的变化的电机转速nm的预测值下的可输出电机转矩tmmax的预测值,而对发动机12的起动请求的有无进行判断。预读了从当前时间点起的变化的电机转速nm为,在当前时间点而言将来上升的电机转速nm,在本实施例中,将电机转速nm的预测值称为预测电机转速nmf。预测电机转速nmf下的可输出电机转矩tmmax为,在当前时间点而言将来可输出的最大的电机转矩tm,在本实施例中,将可输出电机转矩tmmax的预测值称为预测可输出电机转矩tmmaxf。
[0067]
图2为,对变矩器20被设为变矩器状态时的行驶时的预测可输出电机转矩tmmaxf的一个示例进行说明的图。在图2中,实线a示出了根据蓄电池54的可放电电力wout而可输出的最大的电机功率pm即可输出电机功率pmmax的特性。在变矩器状态下的ev行驶中,由于伴随着加速器开度θacc的增大而驾驶员请求转矩trdemd增大,因此判断出存在发动机12的起动请求。当电机转矩tm伴随着驾驶员请求转矩trdemd的增大而增大时,向变矩器20输入的输入转矩增大。相对于向变矩器20输入的输入转矩的增大,由于变矩器20的流体特性而电机转速nm延迟上升。因此,即使假设从判断出存在发动机12的起动请求的时间点起限制了电机转矩tm的增大,也有可能在发动机12的起动控制的过渡中电机转速nm上升。在本实施例中,在当前时间点,根据当前的电机转速nm,而对将来上升的电机转速nm进行预测,并且基于可输出电机功率pmmax和预测电机转速nmf,来求出预测电机转速nmf下的预测可输出电机转矩tmmaxf(参照点b)。预测可输出电机转矩tmmaxf伴随着电机转速nm的上升,从当前的电机转速nm下的可输出电机转矩tmmax(参照点c)降低。
[0068]
图3为,对变矩器20被设为锁止状态时的行驶时的预测可输出电机转矩tmmaxf的一个示例进行说明的图。在图3中,实线d示出了可输出电机功率pmmax的特性。在锁止状态下的ev行驶中,由于驾驶员请求转矩trdemd增大,因此判断出存在发动机12的起动请求。在锁止状态下的ev行驶中,即使伴随着驾驶员请求转矩trdemd的增大而电机转矩tm增大,电机转速nm也仅成为与被车速v唯一地约束的涡轮转速nt一致的值。另一方面,当在锁止状态
下的ev行驶中执行发动机12的起动控制时,在起动控制的执行中,锁止离合器lu进行滑动工作。因此,在发动机12的起动控制的过渡中,电机转速nm与涡轮转速nt相比要上升起动时目标滑动量nslptgtst。在本实施例中,在当前时间点,根据当前的电机转速nm而对将来上升起动时目标滑动量nslptgtst的电机转速nm进行预测,并且基于可输出电机功率pmmax和预测电机转速nmf,而求出预测电机转速nmf下的预测可输出电机转矩tmmaxf(参照点e)。伴随着电机转速nm的上升,预测可输出电机转矩tmmaxf从当前的电机转速nm下的可输出电机转矩tmmax(参照点f)起降低。
[0069]
为了实现在包括发动机12的起动过渡中在内的发动机12的起动时易于保证发动机12的起动所需的电机转矩tm即所需起动转矩tst量从而抑制驾驶性能的恶化这样的功能,电子控制装置90还具备状态判断单元即状态判断部98。此外,为了实现如上所述的功能,混合动力控制部92包括作为电动机转速预测单元即电动机转速预测部92e的功能、以及作为电动机转矩预测单元即电动机转矩预测部92f的功能。
[0070]
状态判断部98对是否处于ev行驶过程中进行判断。状态判断部98在判断出处于ev行驶过程中的情况下,对锁止离合器lu是否处于被卡合的状态进行判断。在此处的锁止离合器lu被卡合的状态中,也包括锁止离合器lu伴随着滑动而被卡合的状态。也就是说,状态判断部98基于锁止离合器lu的工作状态是否为滑动状态或完全卡合状态,而对锁止离合器lu是否处于被卡合的状态进行判断。
[0071]
电动机转速预测部92e在由状态判断部98判断出处于ev行驶中的情况下,根据锁止离合器lu的工作状态而对预读了从当前时间点起的变化的预测电机转速nmf进行计算。
[0072]
电动机转速预测部92e在由状态判断部98判断出处于ev行驶中且判断出锁止离合器lu的工作状态处于完全释放状态的情况下,基于涡轮转速nt、驾驶员请求转矩trdemd和变矩器20的预定的工作特性,而对预测电机转速nmf进行计算。具体而言,电动机转速预测部92e将作为泵转速np的临时值的临时泵转速npt设定为与例如涡轮转速nt相比高出预定值的值。电动机转速预测部92e基于临时泵转速npt和涡轮转速nt而对作为变矩器20的速度比e(=nt/npt)的临时值的临时速度比et进行计算。电动机转速预测部92e通过在如图4所示的、作为速度比e和变矩器20的容量因数c的被预先规定的关系的变矩器20的预定的工作特性中应用临时速度比et,从而对作为容量因数c的临时值的临时容量因数ct进行计算。图4为,表示预先规定了变矩器20中的速度比e与转矩比t、效率η以及容量因数c的每一个之间的关系的变矩器的特性曲线的一个示例的图。电动机转速预测部92e通过在下式(1)中应用临时容量因数ct以及临时泵转速npt,从而对变矩器20的输入转矩即作为泵转矩tp的临时值的临时泵转矩tpt进行计算。ev行驶中的变矩器20的输入转矩相当于ev行驶用的电机转矩tm。ev行驶用的电机转矩tm为,用于实现驾驶员请求转矩trdemd的电机转矩tm,并且相当于将驾驶员请求转矩trdemd换算到电动机mg的输出轴上即电动机连结轴34上而得到的值。此外,泵转速np与电机转速nm同值。电动机转速预测部92e将临时泵转矩tpt成为驾驶员请求转矩trdemd(电动机连结轴34上换算值)的电机转速nm作为预测电机转速nmf而进行计算。
[0073]
tp=c
×
np2…
(1)
[0074]
电动机转速预测部92e在由状态判断部98判断出处于ev行驶中且锁止离合器lu的工作状态处于滑动状态或完全卡合状态的情况下,将相对于涡轮转速nt而上升了起动时目
标滑动量nslptgtst的值(=nt+nslptgtst)作为预测电机转速nmf进行计算。起动时目标滑动量nslptgtst相当于发动机12的起动过程中的锁止离合器lu的滑动量nslp。
[0075]
电动机转矩预测部92f利用预测电机转速nmf,而对预测可输出电机转矩tmmaxf进行计算。具体而言,电动机转矩预测部92f基于可输出电机功率pmmax和预测电机转速nmf而对预测可输出电机转矩tmmaxf进行计算(参照图2、图3)。可输出电机功率pmmax相当于蓄电池54的可放电电力wout。
[0076]
起动请求判断部92c利用预测可输出电机转矩tmmaxf,而对发动机12的起动请求的有无进行判断。具体而言,起动请求判断部92c基于预测可输出电机转矩tmmaxf和驾驶员请求转矩trdemd而对发动机12的起动请求的有无进行判断。起动请求判断部92c基于驾驶员请求转矩trdemd是否超过了从预测可输出电机转矩tmmaxf减去所需起动转矩tst而得到的起动判断值vljs(=tmmaxf
‑
tst),而对是否存在发动机12的起动请求进行判断。另外,该判断时的驾驶员请求转矩trdemd使用换算到电动机连结轴34上的值。
[0077]
起动控制部92d在由状态判断部98判断出处于ev行驶中时,在由起动请求判断部92c判断出由于驾驶员请求转矩trdemd超过了起动判断值vljs从而存在发动机12的起动请求的情况下,开始进行发动机12的起动控制。
[0078]
通过如上所述这样的控制,从而即使在发动机12的起动过渡中电机转速nm上升至预测电机转速nmf,也能在易于保证所需起动转矩tst量的状态下执行发动机12的起动控制。但是,当从判断出存在发动机12的起动请求的时间点起,驾驶员请求转矩trdemd进一步增大时,有可能在发动机12的起动过渡中所需起动转矩tst量被使用于ev行驶用的电机转矩tm量中。因此,在由起动请求判断部92c判断出存在发动机12的起动请求的情况下,起动控制部92d在到完成发动机12的起动控制为止的期间内,将判断为存在发动机12的起动请求的时间点处的驾驶员请求转矩trdemd,即,将判断为存在发动机12的起动请求的时间点处的起动判断值vljs设为,在ev行驶的控制中所使用的驾驶员请求转矩trdemd的上限值。在ev行驶的控制中所使用的驾驶员请求转矩trdemd为,成为对ev行驶用的电机转矩tm进行计算的基础的驾驶员请求转矩trdemd。
[0079]
图5为,对电子控制装置90的控制工作的主要部分进行说明的流程图,且为对用于在包括发动机12的起动过渡中在内的发动机12的起动时易于保证所需起动转矩tst量从而抑制驾驶性能的恶化的控制工作进行说明的流程图,例如被反复执行。
[0080]
在图5中,首先,在与状态判断部98的功能相对应的步骤(以下,省略步骤)s10中,对是否处于ev行驶中进行判断。在该s10的判断被否定的情况下,本例程结束。在该s10的判断被肯定的情况下,在与状态判断部98的功能相对应的s20中,对锁止离合器lu的工作状态是否处于滑动状态或完全卡合状态、即是否处于锁止离合器lu被卡合的状态进行判断。在该s20的判断被否定的情况下,在与电动机转速预测部92e的功能相对应的s30中,基于涡轮转速nt、驾驶员请求转矩trdemd和变矩器20的预定的工作特性,而计算出预测电机转速nmf。接下来,在与电动机转矩预测部92f的功能相对应的s40中,基于可输出电机功率pmmax和预测电机转速nmf,而计算出预测可输出电机转矩tmmaxf。接下来,在与起动请求判断部92c的功能相对应的s50中,基于驾驶员请求转矩trdemd是否超过了从预测可输出电机转矩tmmaxf减去所需起动转矩tst而得到的起动判断值vljs,而判断是否存在发动机12的起动请求。在上述s20的判断被肯定的情况下,在与电动机转速预测部92e、电动机转矩预测部
92f以及起动请求判断部92c的功能相对应的s60中,利用基于在涡轮转速nt上加上了起动时目标滑动量nslptgtst的预测电机转速nmf所得到的预测可输出电机转矩tmmaxf,而判断发动机12的起动请求的有无。
[0081]
如上所述,根据本实施例,由于在ev行驶中,根据锁止离合器lu的工作状态来计算出预测电机转速nmf,并利用该预测电机转速nmf来计算出预测可输出电机转矩tmmaxf,并利用该预测可输出电机转矩tmmaxf来判断发动机12的起动请求的有无,因此即使将来可输出的最大的电机转矩tm与在发动机12的起动开始时可输出的最大的电机转矩tm相比而降低,无论锁止离合器lu的工作状态如何,也能够在易于保证在发动机12的起动过渡中的所需起动转矩tst量的状态下开始发动机12的起动。因此,在包含发动机12的起动过渡中在内的发动机12的起动时,能够易于保证所需起动转矩tst量从而抑制驾驶性能的恶化。
[0082]
另外,根据本实施例,由于在锁止离合器lu处于被释放的状态的情况下,基于涡轮转速nt、驾驶员请求转矩trdemd和变矩器20的预定的工作特性而计算出预测电机转速nmf,因此利用锁止离合器lu被释放的状态下的预测电机转速nmf来适当地计算出预测可输出电机转矩tmmaxf。由此,即使在如在发动机12的起动过渡中由于电机转速nm的上升而可输出电机转矩tmmax易于减少这样的锁止离合器lu被释放的状态下,也能够在易于保证在发动机12的起动过渡中的所需起动转矩tst量的状态下开始发动机12的起动。
[0083]
此外,根据本实施例,由于在锁止离合器lu处于被卡合的状态的情况下,相对于涡轮转速nt而上升了起动时目标滑动量nslptgtst的值作为预测电机转速nmf而被计算出,因此利用锁止离合器lu被卡合的状态下的预测电机转速nmf来适当地计算出预测可输出电机转矩tmmaxf。由此,即使在发动机12的起动过程中如进行滑动工作这样的锁止离合器lu被卡合的状态下,也能够在易于保证发动机12的起动过渡中的所需起动转矩tst量的状态下开始发动机12的起动。
[0084]
此外,根据本实施例,由于基于蓄电池54的可放电电力wout和预测电机转速nmf来计算出预测可输出电机转矩tmmaxf,因此,适当地计算出预测可输出电机转矩tmmaxf。
[0085]
此外,根据本实施例,由于基于驾驶员请求转矩trdemd是否超过了从预测可输出电机转矩tmmaxf减去所需起动转矩tst而得到的起动判断值vljs,来判断是否存在发动机12的起动请求,因此能够在易于保证发动机12的起动过渡中的所需起动转矩tst量的状态下适当地开始发动机12的起动。
[0086]
此外,根据本实施例,由于在判断出存在发动机12的起动请求的情况下,在到完成发动机12的起动控制为止的期间内,判断为存在发动机12的起动请求的时间点处的起动判断值vljs被设为在ev行驶的控制中使用的驾驶员请求转矩trdemd的上限值,因此即使与判断为存在发动机12的起动请求的时间点相比实际的驾驶员请求转矩trdemd增大,也能够在易于保证发动机12的起动过渡中的所需起动转矩tst量的状态下实施发动机12的起动。
[0087]
接下来,对本发明的其他的实施例进行说明。另外,在以下的说明中,对实施例相互共同的部分标记相同的符号,并省略说明。
[0088]
[实施例2]
[0089]
在上述的实施例1中,将从预测可输出电机转矩tmmaxf减去所需起动转矩tst而得到的值设为起动判断值vljs。在此,预测可输出电机转矩tmmaxf会受到预读了从当前时间点起的变化的预测电机转速nmf的计算精度的影响。因此,也可以将在使预测电机转速nmf
向安全侧即变大的一侧进行了估计的情况下的可输出电机转矩tmmax的降低量反映在起动判断值vljs中。可输出电机转矩tmmax的降低量为,作为可输出电机转矩tmmax相对于预读电机转速nm时的偏差的富余量(或安全量)而被预先规定的预测偏差余量tfmgn。可输出电机转矩tmmax相对于预读电机转速nm时的偏差的富余量为,可输出电机转矩tmmax相对于预测电机转速nmf的计算精度的富余量。
[0090]
起动请求判断部92c基于驾驶员请求转矩trdemd是否超过了从预测可输出电机转矩tmmaxf减去所需起动转矩tst以及预测偏差余量tfmgn而得到的起动判断值vljs(=tmmaxf
‑
(tst+tfmgn)),而对是否存在发动机12的起动请求进行判断。
[0091]
预测偏差余量tfmgn为,用于抑制预测电机转速nmf的计算精度的影响的值,并且对于相对于可输出电机转矩tmmax而确保所需起动转矩tst量而言是不需要的。在ev行驶中,难以通过预测偏差余量tfmgn来满足驾驶员请求转矩trdemd。因此,起动控制部92d在由起动请求判断部92c判断出存在发动机12的起动请求的情况下,在直至完成发动机12的起动控制为止的期间内,将在判断为存在发动机12的起动请求的时间点处的驾驶员请求转矩trdemd上加上了预测偏差余量tfmgn而得到的值、即将在判断为存在发动机12的起动请求的时间点处的起动判断值vljs上加上了预测偏差余量tfmgn而得到的值设为,在ev行驶的控制中使用的驾驶员请求转矩trdemd的上限值。
[0092]
图6、图7分别表示考虑到预测偏差余量tfmgn而执行了图5的流程图所示的控制工作的情况下的时序图的一个示例的图。
[0093]
图6表示变矩器20被设为变矩器状态时的行驶时的情况的一个示例。在图6中,实线ls为实际值,虚线lb为预测值。在加速器关闭下的ev行驶中伴随着实施了加速器开启而驾驶员请求转矩trdemd增大(参照实线lsa)。在不使用预测值的比较例中,当驾驶员请求转矩trdemd超过从利用电机转速nm(参照实线lsb)而计算出的可输出电机转矩tmmax(参照实线lsc)减去所需起动转矩tst以及预测偏差余量tfmgn而得到的起动判断值vljs(参照实线lsd)时,判断为存在发动机12的起动请求(参照t2时间点)。即使在从t2时间点到发动机起动控制完成的时间点(参照t3时间点)为止的期间内,对驾驶员请求转矩trdemd的增大通过在t2时间点的起动判断值vljs(参照实线lsd)上加上预测偏差余量tfmgn而得到的值进行限制(参照双点划线lca),也会由于变矩器20的流体特性而在发动机12的起动控制的过渡中使电机转速nm上升。发动机12的起动控制的过渡中为,发动机转速ne以与电机转速nm一致的方式而上升的期间(参照实线lse)。因此,在不使用预测值的情况下,存在在发动机12的起动控制的过渡中无法保证所需起动转矩tst量从而驾驶性能恶化的可能性。与此相对,在使用预测值的本实施例中,以驾驶员请求转矩trdemd为基础来计算出预测电机转速nmf(参照虚线lba),并且利用预测电机转速nmf来计算出预测可输出电机转矩tmmaxf(参照虚线lbb)。当驾驶员请求转矩trdemd超过从预测可输出电机转矩tmmaxf减去所需起动转矩tst以及预测偏差余量tfmgn而得到的起动判断值vljs(参照虚线lbc)时,判断为存在发动机12的起动请求(参照t1时间点)。在使用预测值的情况下,与不使用预测值的情况相比,通过预想到可输出电机转矩tmmax的降低,从而预读出存在发动机12的起动请求这一判断。另外,在未将预测偏差余量tfmgn加以考虑的情况下,从预测可输出电机转矩tmmaxf减去所需起动转矩tst而得到的值被设为起动判断值vljs。因此,在本实施例中,由于以预想到发动机12的起动控制的过渡中的实际的电机转速nm的上升的预测电机转速nmf为基础来判断出
发动机12的起动请求的有无,因此能够在易于保证所需起动转矩tst量的状态下执行发动机12的起动控制。尤其,在将预测偏差余量tfmgn加以考虑的情况下,能够在适当地保证所需起动转矩tst量的状态下执行发动机12的起动控制。此外,在本实施例中,当在t1时间点判断出存在发动机12的起动请求时,对于在ev行驶的控制中所使用的驾驶员请求转矩trdemd而言,直至完成发动机12的起动控制的时间点为止,在t1时间点处的起动判断值vljs(参照虚线lbc)上加上预测偏差余量tfmgn而得到的值被设为上限值(参照双点划线lcb)。另外,在未将预测偏差余量tfmgn加以考虑的情况下,t1时间点处的起动判断值vljs(参照虚线lbc)被设为上限值。由此,在发动机12的起动过渡中,所需起动转矩tst量难以被使用于ev行驶用的电机转矩tm量。尤其,在将预测偏差余量tfmgn加以考虑的情况下,易于通过预测偏差余量tfmgn来满足驾驶员请求转矩trdemd。
[0094]
图7示出了变矩器20被设为锁止状态时的行驶时的情况下的一个示例。在图7中,实线ls为实际值,虚线lb为预测值。在ev行驶中,伴随着加速器开度θacc的增大而驾驶员请求转矩trdemd增大(参照实线lsf)。在不使用预测值的比较例中,当驾驶员请求转矩trdemd超过从利用电机转速nm(参照实线lsg)而计算出的可输出电机转矩tmmax(参照实线lsh)减去所需起动转矩tst以及预测偏差余量tfmgn而得到的起动判断值vljs(参照实线lsi)时,判断出存在发动机12的起动请求(参照t2时间点)。此后,即使对驾驶员请求转矩trdemd的增大用在t2时间点处的起动判断值vljs(参照实线lsi)上加上预测偏差余量tfmgn而得到的值进行限制(参照双点划线lcc),由于在发动机12的起动控制的执行中锁止离合器lu会进行滑动工作,因此在发动机12的起动控制的过渡中电机转速nm与涡轮转速nt相比上升了起动时目标滑动量nslptgtst。因此,在未使用预测值的情况下,有可能在发动机12的起动控制的过渡中无法保证所需起动转矩tst量从而驾驶性能恶化。对此,在使用预测值的本实施例中,计算出在涡轮转速nt(参照实线lsj)上加上起动时目标滑动量nslptgtst而得到的预测电机转速nmf(参照虚线lbd),并且利用预测电机转速nmf而计算出预测可输出电机转矩tmmaxf(参照虚线lbe)。当驾驶员请求转矩trdemd超过从预测可输出电机转矩tmmaxf减去所需起动转矩tst以及预测偏差余量tfmgn而得到的起动判断值vljs(参照虚线lbf)时,判断为存在发动机12的起动请求(参照t1时间点)。因此,由于在本实施例中,以预想到发动机12的起动控制的过渡中的实际的电机转速nm的上升的预测电机转速nmf为基础来判断出发动机12的起动请求的有无,因此能够在易于保证所需起动转矩tst量的状态下执行发动机12的起动控制。尤其,在本实施例中,由于将预测偏差余量tfmgn加以考虑,因此能够在适当地保证了所需起动转矩tst量的状态下执行发动机12的起动控制。此外,在本实施例中,当在t1时间点判断出存在发动机12的起动请求时,对于在ev行驶的控制中使用的驾驶员请求转矩trdemd而言,直至发动机12的起动控制完成为止,在t1时间点处的起动判断值vljs(参照虚线lbf)上加上预测偏差余量tfmgn而得到的值被设为上限值(参照双点划线lcd)。由此,在发动机12的起动过渡中,所需起动转矩tst量难以被使用于ev行驶用的电机转矩tm量。尤其,在本实施例中,由于将预测偏差余量tfmgn加以考虑,因此,易于通过预测偏差余量tfmgn来满足驾驶员请求转矩trdemd。
[0095]
如上所述,根据本实施例,与前述的实施例1同样地,能够在包含发动机12的起动过渡中在内的发动机12的起动时易于保证所需起动转矩tst量,从而抑制驾驶性能的恶化。
[0096]
此外,根据本实施例,由于基于驾驶员请求转矩trdemd是否超过了从预测可输出
电机转矩tmmaxf减去所需起动转矩tst以及预测偏差余量tfmgn而得到的起动判断值vljs,来判断出是否存在发动机12的起动请求,因此,能够在适当地保证了发动机12的起动过渡中的所需起动转矩tst量的状态下适当地开始发动机12的起动。
[0097]
此外,根据本实施例,由于在判断出存在发动机12的起动请求的情况下,在到发动机12的起动控制完成为止的期间内,在判断出存在发动机12的起动请求的时间点处的起动判断值vljs上加上预测偏差余量tfmgn而得到的值被设为在ev行驶的控制中使用的驾驶员请求转矩trdemd的上限值,因此能够在适当地保证了发动机12的起动过渡中的所需起动转矩tst量的状态下执行发动机12的起动,并且易于通过预测偏差余量tfmgn来满足驾驶员请求转矩trdemd。
[0098]
以上,基于附图,而对本发明的实施例进行了详细的说明,但本发明也被应用于其他的方式中。
[0099]
例如,在前述的实施例中,也可以设为,在图5的流程图中,在s60中仅执行预测电机转速nmf的计算,并且紧接着该s60或s30,而执行s40、s50等,图5的流程图能够适当地进行变更。
[0100]
此外,虽然在前述的实施例中,作为构成发动机12与驱动轮14之间的动力传递路径的一部分且将来自各个驱动力源(发动机12、电动机mg)的驱动力向驱动轮14传递的自动变速器22,而例示了行星齿轮式的自动变速器,但并未被限于该方式。自动变速器22也可以为包括公知的dct(dual clutch transmission:双离合变速器)在内的同步啮合型平行双轴式自动变速器、公知的带式无级变速器等。
[0101]
此外,虽然在前述的实施例中,作为流体式传动装置而使用了变矩器20,但并未被限定于该方式。例如,作为流体式传动装置,也可以代替变矩器20,使用不具有转矩放大作用的液力耦合器等其他的流体式传动装置。总之,只要是具备发动机、以可动力传递的方式连结于所述发动机和驱动轮之间的动力传递路径上的电动机、切断所述发动机与所述电动机之间的连结的离合器、以及将来自所述发动机以及所述电动机的驱动力向所述驱动轮传递的附带锁止离合器的流体式传动装置的车辆,就能够应用本发明。
[0102]
另外,上述的方式只不过为一个实施方式,本发明能够基于本领域技术人员的指示而以施加各种各样的变更、改良的方式实施。
[0103]
符号说明
[0104]
10:车辆;
[0105]
12:发动机;
[0106]
14:驱动轮;
[0107]
20:变矩器(流体式传动装置);
[0108]
54:蓄电池(蓄电装置);
[0109]
90:电子控制装置(控制装置);
[0110]
92c:起动请求判断部;
[0111]
92d:起动控制部;
[0112]
92e:电动机转速预测部;
[0113]
92f:电动机转矩预测部;
[0114]
k0:断接用离合器(离合器);
[0115]
lu:锁止离合器;
[0116]
mg:电动机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1