停车辅助系统的制作方法
1.本发明涉及一种停车辅助系统。更详细地说,涉及一种停车辅助系统,其辅助将车辆对位停车在以非接触方式供给蓄电池充电用电力的停车位上。
背景技术:
2.关于电动车辆,以往提出一种结构,是利用非接触供电将蓄电池充电用的电力提供至车辆。在这种车辆中的非接触供电中,由供电线圈实现的供电部设置于路面上。另外,利用受电线圈实现的受电部设置于车辆的底部,从供电部送出蓄电池充电用电力,并以受电部接受电力。
3.在这种车辆中的非接触供电中,需要高效地供给电力。因此,在专利文献1中,提出设法将供电部的磁通量分布的相关信息通知给车辆。另外,在专利文献2中提出一种配置,所述配置在藉由环状线圈与螺线圈(solenoid coil)的组合来实施的供电中提高效率。
4.[先前技术文献]
[0005]
(专利文献)
[0006]
专利文献1:日本专利第5884890号
[0007]
专利文献2:日本专利第5718879号
技术实现要素:
[0008]
[发明要解决的问题]
[0009]
但是,供电线圈和受电线圈通常应用环状线圈。此外,环状线圈缠绕磁线地形成为环形形状,以围着缠绕中心轴旋转。当是此环状线圈时,以缠绕中心轴也就是线圈的中心轴一致的方式对供电线圈配置受电线圈,由此,能够最高效地供电。因此,此时需要对受电线圈进行对位,以相对于供电线圈使中心一致。
[0010]
但是,有时也使用dd型线圈作为供电线圈。所谓dd型线圈,是将水平方向上邻接的两个环状线圈以缠绕方向相反的方式连接而成,俯视时是8字型。此时,在线圈的中心相对于供电线圈一致的位置偏离的位置上配置受电线圈,由此,能够高效地供电。但是,以往当供电线圈使用dd型线圈时,对于具体将受电部对位至哪个位置才好,并未充分研究。
[0011]
本发明的目的在于,提供一种停车辅助系统,即使供电线圈使用dd型线圈时,也能够将受电部对位至适当的位置。
[0012]
[解决问题的技术手段]
[0013]
(1)、本发明的停车辅助系统(例如后述停车辅助系统1),其辅助将车辆(例如后述车辆2)对位停车在以非接触方式供给蓄电池充电用电力的停车位上,所述停车辅助系统的特征在于:前述停车位设置有供电部(例如后述供电部41),所述供电部将前述对位用电力从供电线圈送出;前述车辆具备:受电部(例如后述受电部11),其利用受电线圈接受前述对位用电力;电压测量部(例如后述电压测量部14),其测量前述受电线圈的电压;线圈类别特定部(例如后述车载通信装置21和对位辅助部23),其在进行前述对位停车时,特定前述供
电线圈的类别;及,对位辅助部(例如后述对位辅助部23),其基于前述电压测量部测得的电压测量值,算出前述对位停车时的前述受电部的目标位置;并且,当前述供电线圈的类别是dd型线圈(例如后述dd型线圈ld)时,前述对位辅助部算出改变前述供电部与前述受电部的相对位置时的前述电压测量值的峰值位置(例如后述第1峰值p1的位置)后,基于前述峰值位置来算出前述目标位置。
[0014]
(2)、此时优选为,前述对位辅助部,在前述对位停车时,将前述目标位置的相关信息显示于显示部(例如后述显示部12)。
[0015]
(3)、此时优选为,前述停车位设置有无线通信装置(例如后述无线通信装置44),所述无线通信装置送出用于识别前述供电线圈的类别的识别信息;前述线圈类别特定部,在前述对位停车时,基于从前述无线通信装置送出的识别信息来特定前述供电线圈的类别;并且,前述受电线圈是环状线圈(例如后述环状线圈lo)。
[0016]
(发明的效果)
[0017]
(1)、在本发明的停车辅助系统中,停车位侧的供电部,将对位用电力从供电线圈送出,车辆侧的受电部利用受电线圈接受对位用电力,电压测量部测量受电线圈的电压,线圈类别特定部特定供电线圈的类别,对位辅助部基于电压测量值,算出对位停车时受电部的目标位置。此处,当供电线圈是dd型线圈时,如后续参照图5所说明,可以在两个位置高效地充电。即,当沿水平面改变供电部与受电部的相对位置时,电压测量值出现两个峰值。因此,当对位辅助部在供电线圈的类别是dd型线圈时,算出改变供电部与受电部的相对位置时的电压测量值的峰值的位置后,基于此峰值的位置来算出受电部的目标位置。因此,驾驶员参照如此算出的目标位置,由此,即使供电线圈使用dd型线圈时,也能够将受电部对位至适当的位置。
[0018]
(2)、在本发明中,对位辅助部,在对位停车时,将如上所述算出的目标位置的相关信息显示于显示部。由此,驾驶员在对位停车时,参照显示部所显示的目标位置的相关信息,由此,能够将受电部对位至适当的位置。
[0019]
(3)、供电线圈的类别有时无法根据其外观进行识别。对此,停车位侧的无线通信装置送出用于识别供电线圈的类别的识别信息,车辆侧的线圈类别特定部,在对位停车时,基于从停车位侧送出的识别信息来特定供电线圈的类别。由此,线圈类别特定部,即使在无法从外观识别类别时,也能识别供电线圈的类别。另外,在本发明中,受电线圈使用环状线圈。由此,即使在使用dd型线圈作为供电线圈,并使用环状线圈作为受电线圈时,也能够将受电部对位至适当的位置。
附图说明
[0020]
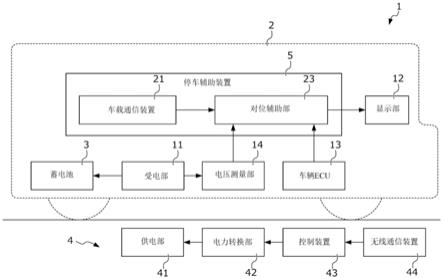
图1是绘示本发明的一实施方式的停车辅助系统的方块图。
[0021]
图2是绘示环状线圈的一例的立体图。
[0022]
图3是绘示dd型线圈的一例的立体图。
[0023]
图4是从上方观察对位停车时的车辆的图。
[0024]
图5是绘示改变供电部与受电部的相对位置时的lpe电压的特性的图。
[0025]
图6是绘示当供电线圈的类别是dd型线圈时的对位辅助处理的具体步骤的流程图。
具体实施方式
[0026]
以下,针对本发明的一实施方式的停车辅助系统,参照图式进行说明。
[0027]
图1是绘示本实施方式的停车辅助系统1的方块图。停车辅助系统1,辅助将车辆2停放在能够以非接触方式供电的停车位上。
[0028]
车辆2是利用可充放电的蓄电池3的电力而行驶的电动车辆。蓄电池3可广泛使用锂离子二次电池和镍氢二次电池等能够对车辆2可行驶的电力进行充放电的二次电池和电容器等。停车位设置有供电装置4,所述供电装置4供给蓄电池3的充电用电力。
[0029]
停车辅助系统1具备:供电装置4,其设置于停车位;及,车辆2,其搭载后述的停车辅助装置5。
[0030]
供电装置4具备:供电部41,其包括送出电力的供电线圈;电力转换器42,其将未图示的交流电力转换成送电电力,并提供至供电部41;控制装置43,其操作电力转换器42,从供电部41送出电力;及,无线通信装置44,其与搭载在车辆2上的车载通信装置21进行无线通信。
[0031]
供电部41具备设置于停车位的路面上的供电线圈。更具体地说,供电线圈设置于与受电线圈相对向且靠近的位置,所述受电线圈设置于在停车位进行对位停车的车辆2上。供电部41将从电力转换器42供给的送电电力从供电线圈送出。此处,供电线圈使用环状线圈(参照图2)或者dd型线圈(参照图3)。此外,在本实施方式中,对使用dd型线圈作为供电线圈的情况进行说明。
[0032]
图2是绘示环状线圈lo的一例的立体图。环状线圈lo缠绕磁线形成圆环状,以围着缠绕中心轴o旋转,俯视时为o字型。因此,环状线圈lo也被称作o型线圈。
[0033]
图3是绘示dd型线圈ld的一例的立体图。dd型线圈ld是将水平方向上邻接的两个环状线圈lo1,lo2以缠绕方向相反的方式连接而成。dd型线圈ld俯视时是8字型。另外,第1环状线圈lo1与第2环状线圈lo2是大致相同的形状。当使用dd型线圈ld作为供电线圈时,此dd型线圈ld以两个环状线圈lo1,lo2沿停车位中的车辆的行驶方向x邻接的方式,设置于停车位的路面上。
[0034]
返回图1,无线通信装置44利用例如wi
‑
fi(注册商标)与其附近的可无线通信的范围内存在的车载通信装置21之间进行数据通信。更具体地说,在无线通信装置44与搭载在欲对位停车的特定的车辆2上的车载通信装置21之间执行认证处理(配对)后,在与车载通信装置21之间收发一系列的处理所需要的各种数据。此处,所谓对位停车,是指以设置于车辆2上的受电部11与供电部41相对向的方式,使车辆2停在停车位内。另外,从停车位侧的无线通信装置44发送至车辆2侧的车载通信装置21的数据中,包含有用以识别设置于停车位上的供电线圈的类别的识别信息。因此,在车辆2侧,能够特定设置于要进行对位停车的停车位上的供电线圈的类别是dd型线圈还是环状线圈。
[0035]
控制装置43在对位停车时,根据经过利用无线通信装置44的认证处理而与供电部41配对,操作电力转换器42,从供电部41的供电线圈送出对位用电力。另外,控制装置43从供电部41的供电线圈送出对位用电力,由此,根据车辆2在停车位进行对位停车,操作电力转换器42,从供电部41的供电线圈送出蓄电池3的充电用电力。此处,对位用电力比蓄电池3的充电用电力还微弱。
[0036]
车辆2具备:蓄电池3、停车辅助装置5、受电部11、显示部12、车载电脑也就是车辆
ecu(电子控制单元)13及电压测量部14。
[0037]
受电部11以非接触方式接受从供电装置4的供电部41送出的电力,并对蓄电池3充电。此处,关于控制蓄电池3的充电方法、充放电,可以广泛应用可适用于这种车辆2的各种结构。受电部11具备与供电部41的供电线圈对应的受电线圈、对来自此受电线圈的输出进行整流的整流电路、及蓄电池3的充放电控制电路等。受电线圈在进行对位停车的车辆2中,以靠近与设置于停车位内的供电线圈垂直的方向上方的方式,配置于车辆2的底部。此外,在本实施方式中,对使用参照图2说明的环状线圈lo作为受电线圈的情况进行了说明,但本发明并不限定于此。
[0038]
显示部12是利用图像显示来提示驾驶员和其他乘客各种信息的显示器。显示部12可以使用液晶显示面板、有机el(电致发光)面板等图像显示面板和平视显示器等。以下,对利用汽车导航装置的显示器作为显示部12的情况进行说明,但本发明并不限定于此。
[0039]
车辆ecu 13是总括控制车辆2的控制器。车辆ecu 13将在对位停车时车辆2的移动距离(行驶距离)等停车辅助装置5的处理所需要的各种信息输出至停车辅助装置5。
[0040]
电压测量部14测量受电线圈的电压。更具体地说,电压测量部14测量在对位停车时利用受电线圈接受如上所述从供电部41的供电线圈送出的对位用的微弱电力时受电线圈的电压,并将与测量值对应的信号输出至停车辅助装置5。此外,以下也将利用受电线圈接受对位用的微弱电力时由电压测量部14测量的电压称作低功率激励(low power excitation;lpe)电压。
[0041]
图4是从上方观察对位停车时的车辆2的图。在图4中,对使车辆2沿行驶方向x前进并且停在两根车道线l之间的停车位s的情况进行图示。在停车位s中,设置有如上所述具备dd型线圈作为供电线圈的供电部41。另外,车辆2上设置有受电部11,所述受电部11如上所述具备环状线圈作为受电线圈。因此,在对位停车时,如图4所示,若使车辆2沿行驶方向x前进,则供电部41与受电部11的沿水平方向的相对位置发生变化。
[0042]
图5是绘示改变供电部41与受电部11的相对位置时的lpe电压的特性。更具体地说,图5示出在对位停车时如图4所示使车辆2前进而改变供电部41与受电部11的相对位置时的lpe电压的变化。在图5中,纵轴表示由电压测量部14测得的lpe电压测量值v,横轴表示以特定的标准位置p为基点的车辆2沿行驶方向x的移动距离t。
[0043]
如参照图3所说明,当使供电线圈为dd型线圈ld时,若使车辆2沿行驶方向x前进,则设置于车辆2上的受电线圈依次横穿dd型线圈ld的两个环状线圈lo1,lo2。因此,对改变以标准位置p为基点的移动距离t时的lpe电压测量值v进行制图后,如图5所示,显现出第1峰值p1和第2峰值p2的两个峰值、与这两个峰值p1,p2之间的极小点p3。第1峰值p1在受电线圈与环状线圈lo1相对向时产生,第2峰值p2在受电线圈与环状线圈lo2相对向时产生。另外,由于第1环状线圈lo1与第2环状线圈lo2是大致相同的形状,因此峰值p1,p2的高度(电压波高值)大致相同。另外,lpe电压测量值v的波形以极小点p3为中心大致对称。因此,第1峰值p1到极小点p3的距离t13与极小点p3到第2峰值p2的距离t32大致相等。
[0044]
如上所述,当将供电线圈作为dd型线圈且将受电线圈作为环状线圈时,在两个不同位置产生峰值p1,p2,因此能够在第1峰值p1的位置与第2峰值p2的位置两个不同位置,在较高的供电效率下对蓄电池3充电。
[0045]
返回图1,停车辅助装置5具备车载通信装置21与对位辅助部23,使用这些部件来
辅助将车辆2对位停车在设置有供电装置4的停车位上车。
[0046]
车载通信装置21利用例如wi
‑
fi(注册商标)与其附近的可无线通信的范围内存在的无线通信装置44之间进行数据通信。车载通信装置21在特定周期内扫描特定的频率范围,判定在可无线通信的范围内是否有无线通信装置44。车载通信装置21在对位停车时,在可无线通信的范围内存在无线通信装置44时,在与此无线通信装置44之间进行认证处理后,开始数据通信。另外,车载通信装置21接收在对位停车时从无线通信装置44送出的供电线圈的识别信息,并将此识别信息发送至对位辅助部23。由此,利用车辆2侧的车载通信装置21和对位辅助部23,能够特定设置于要停车的停车位上的供电线圈的类别。
[0047]
对位辅助部23基于由电压测量部14测得的lpe电压测量值v、从车辆ecu1 3发送的车辆2的移动距离t及从车载通信装置21发送的供电线圈的识别信息,算出对位停车时的受电部11的目标位置,并将此目标位置的相关信息显示于显示部12,由此,辅助驾驶员进行对位停车。以下,对基于从车载通信装置21发送的识别信息来特定供电线圈的类别是dd型线圈的情况进行说明。
[0048]
当供电线圈的类别是dd型线圈时,改变供电部41与受电部11的相对位置时的lpe电压的变化如图5所示地,产生第1峰值p1和第2峰值p2。因此,对位辅助部23在对位停车时,基于从无线通信装置44发送的识别信息来特定供电线圈的类别是dd型线圈时,基于lpe电压测量值v与移动距离t,算出第1峰值p1的位置与极小点p3的位置后,基于这些第1峰值p1的位置与极小点p3的位置来算出第2峰值p2的位置,将此第2峰值p2的位置作为受电部11的目标位置。
[0049]
图6是绘示当供电线圈的类别是dd型线圈时,对位辅助部23进行对位辅助处理的具体步骤的流程图。图6所示的处理,基于从无线通信装置44发送的识别信息,与对位辅助部23特定为供电线圈的类别是dd型线圈相应地开始。
[0050]
起初,在s1中,对位辅助部23算出lpe电压测量值v的移动距离t的微分值(dv/dt)。更具体地说,对位辅助部23利用移动距离t的微小变化(dt)除lpe电压测量值v的微小变化(dv),由此,算出微分值(dv/dt)。
[0051]
接着,在s2中,对位辅助部23判定算出的lpe电压测量值v的微分值是否大致为0。如图5所示,在受电部11达到第1峰值p1之前,lpe电压测量值v增加。也就是,在此期间,lpe电压测量值v的移动距离t的微分值为正。与此相对地,受电部11达到第1峰值p1后,lpe电压测量值v的微分值大致为0。对位辅助部23在s2的判定结果为“否”时,返回s1;而在s2的判定结果为“是”时,也就是受电部11达到第1峰值位置p1时,转移到s3。
[0052]
接着,在s3中,对位辅助部23算出第1峰值p1的位置(以下还称作“第1峰值位置”)。此第1峰值位置例如能够基于lpe电压测量值v的微分值为0时的移动距离t来算出。
[0053]
接着,在s4中,对位辅助部23利用与s1相同的步骤,算出lpe电压测量值v的移动距离t的微分值(dv/dt)。接着,在s5中,对位辅助部23判定算出的lpe电压测量值v的微分值是否大致为0。如图5所示,受电部11通过第1峰值p1后,lpe电压测量值v减少。也就是,在此期间,lpe电压测量值v的移动距离t的微分值为负。与此相对地,受电部11达到极小点p3后,lpe电压测量值v的微分值再次大致为0。对位辅助部23在s5的判定结果为“否”时,返回s4;而在s5的判定结果为“是”时,转移至s6。
[0054]
接着,在s6中,对位辅助部23算出极小点p3的位置(以下还称作“极小点位置”)。此
极小点位置能够例如基于lpe电压测量值v的微分值为0时的移动距离t来算出。
[0055]
接着,在s7中,对位辅助部23基于第1峰值位置与极小点位置来算出受电部11的目标位置。更具体地说,对位辅助部23算出第1峰值位置与极小点位置之间的沿行驶方向x的距离,并且将算出的距离乘以2所获得的值与第1峰值位置加起来,由此算出第2峰值p2的位置(以下还称作“第2峰值位置”),并将此第2峰值位置作为受电部11的目标位置。
[0056]
接着,在s8中,对位辅助部23,将s7中算出的目标位置的相关信息显示于显示部12。此处,显示部12可以用驾驶员可认识的形式显示目标位置的相关信息,也可以用驾驶员可认识的形式显示受电部11的目前位置与目标位置的偏差相关的信息。由此,驾驶员在对位停车时,参照显示部12显示的目标位置的相关信息,能够将受电部11对位至目标位置。
[0057]
在以上本实施方式中,已说明对位辅助部23,在算出第1峰值位置和极小点位置后,基于这些第1峰值位置和极小点位置来算出目标位置的情况,但本发明并不限定于此。例如在对位停车时,在对位辅助部23中,当能掌握第1峰值位置与第2峰值位置之间的距离时,可以在算出第1峰值位置之后,基于此第1峰值位置来算出目标位置。由此,在对位停车时,能够在算出极小点位置之前,算出目标位置,因此,能够在更早的时机将目标位置的相关信息显示于显示部12。此外,第1峰值位置与第2峰值位置之间的距离,能够与例如从无线通信装置44送出的供电线圈的识别信息一起,在对位辅助部23中掌握。
[0058]
根据本实施方式的停车辅助系统1,起到以下效果。
[0059]
(1)在停车辅助系统1中,停车位侧的供电部41将对位用电力从供电线圈送出,车辆2侧的受电部11利用受电线圈接受对位用电力,电压测量部14测量受电线圈的电压,车载通信装置21取得供电线圈的识别信息来特定供电线圈的类别,对位辅助部23基于lpe电压测量值v算出对位停车时的受电部11的目标位置。此处,当供电线圈是dd型线圈时,如上所述,能够在两个位置高效地充电。也就是,当沿水平面改变供电部41与受电部11的相对位置时,lpe电压测量值v显现出第1和第2峰值。因此,对位辅助部23在供电线圈的类别是dd型线圈时,算出改变供电部41与受电部11的相对位置时的lpe电压测量值v的第1峰值p1的位置,并基于此第1峰值p1的位置来算出受电部11的目标位置。因此,驾驶员参照如此算出的目标位置,即使供电线圈使用dd型线圈时,也能够将受电部11对位至适当的位置。
[0060]
(2)对位辅助部23在对位停车时,将如上所述算出的目标位置的相关信息显示于显示部12。由此,驾驶员在对位停车时,参照显示部12显示的目标位置的相关信息,由此,能够将受电部11对位至适当的位置。
[0061]
(3)供电线圈的类别有时无法根据其外观进行识别。对此,停车位侧的无线通信装置44送出识别供电线圈的类别的识别信息,车辆两侧的车载通信装置21基于在对位停车时从停车位侧送出的识别信息来特定供电线圈的类别。由此,车载通信装置21即使在无法从外观识别类别时,也能识别供电线圈的类别。另外,在车辆2中,受电线圈使用环状线圈。由此,即使在使用dd型线圈作为供电线圈且使用环状线圈作为受电线圈时,也能够将受电部11对位至适当的位置。
[0062]
以上,对本发明的一实施方式进行了说明,但本发明并不限定于此。在本发明的主旨范围内,可以对细节的构成适当加以变更。
[0063]
附图标记
[0064]1ꢀꢀ
停车辅助系统
[0065]2ꢀꢀ
车辆
[0066]
11 受电部
[0067]
12 显示部
[0068]
14 电压测量部
[0069]
21 车载通信装置(线圈类别特定部)
[0070]
23 对位辅助部(线圈类别特定部)
[0071]
41 供电部
[0072]
44 无线通信装置
[0073]
lo 环状线圈
[0074]
ld dd型线圈
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1