可移动功率耦合以及具有可移动功率耦合的机器人的制作方法
可移动功率耦合以及具有可移动功率耦合的机器人
1.本申请是国际申请号为pct/us2016/016933、国际申请日为2016年2月8日、优先权日为2015年2月6日、进入中国国家阶段日期为2017年8月3日、中国国家申请号为201680008606.7的发明专利申请的分案申请。
技术领域
2.示例性和非限制性实施例一般涉及功率耦合,并且更具体地涉及可移动功率耦合。
背景技术:
3.工业设备通常具有需要电力操作的移动自动化或有效载荷。通常,将提供一种服务回路,其从固定部件向移动部件提供功率,其中服务回路可以具有电子链路或其他方式中的多个导体。电线的弯曲可能成为可靠性问题,并且电线和/或电子链路的相对移动可能产生不期望的颗粒或污染。
技术实现要素:
4.以下发明内容仅仅是示例性的。该发明内容不旨在限制权利要求的范围。
5.按照一个方面,一种装置包括第一感应段,其包括第一芯和第一芯上的第一线圈。第二感应段包括第二芯和第二芯上的第二线圈。第一芯包括轨道延伸部,其中轨道延伸部中的至少两个轨道延伸部从第一芯的相对端延伸。第二芯包括位于轨道延伸部中的相应轨道延伸部处的靴部分,其中在轨道延伸部中的每个轨道延伸部和靴部分中的相应的靴部分之间设置有间隙。第二感应段被配置成在沿着延伸部的路径中相对于第一感应段移动。第一感应段被配置成在第二感应段中感应电流,包括当第二芯沿着延伸部相对于第一芯移动时,提供第一感应段和第二感应段之间的非接触感应耦合。
6.按照另一示例性方面,一种方法可以包括:提供第一感应段,其包括第一芯和第一芯上的第一线圈,其中第一芯包括轨道延伸部,其中轨道延伸部中的至少两个轨道延伸部从第一芯的相对端延伸。该方法还可以包括:提供第二感应段,其包括第二芯和第二芯上的第二线圈,其中第二芯包括靴部分。该方法可以进一步包括:相对于第一感应段来定位第二感应段,其中靴部分位于轨道延伸部中的相应的轨道延伸部处,其中在轨道延伸部中的每个轨道延伸部和靴部分中的相应的靴部分之间设置有间隙,并且使得第二感应段被配置成在沿着延伸部的路径中相对于第一感应段移动。第一感应段被配置成在第二感应段中感应电流,包括当第二芯沿着延伸部相对于第一芯移动时,提供第一感应段和第二感应段之间的非接触感应耦合。
7.按照另一示例性方面,一种方法可以包括:提供包括第一感应段和第二感应段的非接触感应耦合,其中第一感应段包括第一芯和第一芯上的第一线圈,其中第一芯包括轨道延伸部,其中轨道延伸部中的至少两个轨道延伸部从第一芯的相对端延伸,并且其中第二感应段包括第二芯和第二芯上的第二线圈,其中第二芯包括靴部分,第二感应段相对于
所述第一感应段定位,使得靴部分位于轨道延伸部中的相应的轨道延伸部处,其中轨道延伸部中的轨道延伸部和靴部分中的相应的靴部分之间设置有间隙,并且使得第二感应段被配置成在沿着延伸部的路径中相对于第一感应段移动。当第二感应段沿着第一感应段的延伸部移动时,在第一感应段产生交变磁通并且在第二感应段中由交变磁通感应电流。
附图说明
8.在下面结合附图进行的描述中对上述方面和其他特征进行了解释,其中
9.图1是一个示例性实施例的耦合的框图表示;
10.图2是一个示例性实施例的耦合的等轴测表示;
11.图3是一个示例性实施例的耦合的等轴测表示;
12.图4是一个示例性实施例的耦合的等轴测表示;
13.图5是一个示例性实施例的耦合的端部表示;
14.图6a是耦合的一个示例性芯组的表示;
15.图6b是耦合的一个示例性芯组的表示;
16.图6c是耦合的一个示例性芯组的表示;
17.图6d是耦合的一个示例性芯组的表示;
18.图7是一个示例性实施例的耦合的等轴测表示;
19.图8是一个示例性实施例的耦合的等轴测表示;
20.图9是一个示例性实施例的耦合的等轴测表示;
21.图10是并入实施例的耦合的示例性机器人的表示;
22.图11是并入实施例的耦合的示例性机器人的表示;
23.图12是一个示例性实施例的初级模块的等轴测表示;
24.图13是一个示例性实施例的次级模块的等轴测表示;
25.图14是一个示例性实施例的耦合的表示;
26.图15是一个示例性实施例的耦合的表示;
27.图16是一个示例性实施例的耦合的示意图示;
28.图17是一个示例性实施例的初级芯或次级芯的等轴测表示;以及
29.图18是一个示例性实施例的末段的等轴测表示。
具体实施方式
30.参见图1,示出了并入了示例实施例的特征的一个示例性实施例的耦合10的框图表示。尽管将参照附图中示出的示例实施例对特征进行描述,但是应当理解,特征可以以许多备选形式的实施例来实现。另外,可以使用任何合适的尺寸、形状或类型的元件或材料。
31.提供设备或耦合10用于两个可移动物体之间的非接触式电力传输,例如,固定转盘(traverser)和利用该设备的机器人。基于于2012年9月14日提交的题为“低变化性机器人”的美国专利申请第13/618,117号,或于2015年1月21日提交的题为“衬底运输平台”的美国专利申请序列号第14/601,455号(二者的全部内容在此通过引用并入本文),设备或耦合器10可以与根据于2013年3月21日公布的美国专利申请第2013/0071218号中公开的运输机构和设备结合使用。设备或耦合10可以与根据于2014年7月24日提交的题为“具有不均等链
路长度的臂的机器人”的美国专利公开号2014/0205416a1(其全部内容在此通过引用并入本文)中公开的运输机构和设备结合使用。可替代地,耦合10可以用于任何合适的设备或应用中。
32.参考图1,示出了一个示例性实施例的耦合10的框图表示。如所描绘的,设备或耦合10可以包括ac电源12、具有初级模块16和次级模块18的功率耦合14、以及可选的整流器电路20。ac电源22被供应给初级模块16,其中初级模块16又通过间隙24向次级模块18提供功率,其中次级模块18向整流器电路20提供ac功率26。并且初级模块和次级模块被配置成使得它们可以相对于彼此移动,包括平移、旋转或两者的组合。初级模块和次级模块可以是初级芯或次级芯或主轨道或次轨道。在备选方面中,可以提供任何合适的组合或几何形状。
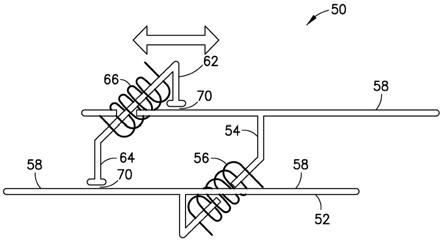
33.现在参考图2,示出了一个示例性实施例的耦合50的等轴测表示。初级模块52可以由初级芯或轨道54以及初级绕组或线圈56组成,其可以被配置成使得ac电流(例如,由ac电源12提供的)通过初级绕组56在初级芯或轨道54中产生交变磁通。该初级芯或轨道54在初级模块52和次级模块62之间沿着相对运动方向可以具有延伸部58。次级模块62可以由次级芯或轨道64和次级绕组或线圈66组成,其被配置成使得次级芯或轨道64中的交变磁通在次级绕组66中感应电压。次级芯或轨道64可以被布置成使得其可以沿着初级芯或轨道54的延伸部58作为次级模块的一部分移动并且使得磁通可以在靴部分处的初级芯或轨道的延伸部和次级芯或轨道之间穿过,越过初级芯或轨道52的延伸部58和次级芯或轨道62之间的空气间隙70。如图1所示,次级绕组66的输出可以直接用作ac电源,或者如果需要dc电力,则次级绕组66可以馈送整流器电路20,整流器电路20又可以用作dc电源28。初级绕组56和次级绕组66可以具有基本上相同的匝数,以使次级绕组66的输出电压的幅度基本上等于由ac电源12供应的电压的幅度。如果需要更高的输出电压,则次级绕组66的匝数可以高于初级绕组56的匝数。相反,如果需要较低的输出电压,次级绕组66的匝数可以低于初级绕组56的匝数。初级芯54和次级芯64可以是c形的(如图2所示意性描绘的)、e形(如图3所示),或者它们可以具有允许初级模块52和次级模块62感应耦合的任何合适的形状。初级芯54的延伸部58可以是直的,以支持初级模块52和次级模块62之间的直线运动(如图2和图3的示例所示),或者它们可以是弯曲的,以支持弯曲或旋转运动。用于旋转运动的布置的示例配置在图4和图5中通过示例示出。形成空气间隙70的初级芯54的延伸部58和次级芯64的部分可以被成形成使越过空气间隙70的磁阻最小化(如图6的示例所描绘的)。初级芯54、延伸部58和次级芯64可以由软磁材料制成,比如硅钢、软磁复合材料、适用于引导磁通的另一种材料、或这些材料的组合。可以利用叠层构造。这里,初级和次级可以被认为是绕组是线圈的感应段。
34.现在,参考图3,示出了一个示例性实施例的耦合100的等轴测表示。还参考图5,示出了一个示例性实施例的耦合100的端部表示。耦合100被示出具有e形初级102、e形次级104、e形初级芯106和e形次级芯108。延伸部110从e形初级芯106的三个部分延伸。初级绕组114驻留在e形初级芯106的中心支柱上并且次级绕组116驻留在e形次级芯108的中心支柱上,其中磁通被引导通过中心支柱并环绕两个环,每个环与外侧支柱相对应。次级104相对于初级102沿着运动轴线112移动,其中交变磁通穿过间隙118,从而从初级绕组114向次级绕组116传递功率。
35.现在,参考图4,示出了一个示例性实施例的耦合150的等轴测表示,其中耦合150包括旋转功率耦合。耦合150具有圆形初级152和次级154,其围绕以圆形初级152为中心的
轴线旋转162。初级芯156和次级芯158通过间隙168传递它们之间的交变磁通,其中当芯158围绕运动轴线162旋转并且维持间隙168时,直径延伸部160提供与c形芯158配合的圆形表面。这里,初级绕组164通过芯156和158以及通过非接触间隙168在次级绕组166中产生交变磁通。
36.现在参考图6a至6d,示出了耦合的示例性芯组的表示,其示出了备选几何形状,例如,在非接触间隙上传递磁通的靴部分。图6a至图6d示出了示例性非限制性几何形状,并且在备选方面中,任何合适的几何形状可以用于通过间隙传递磁通,该间隙由线性、旋转或任何合适的相对运动而维持。作为示例,在图6a中,芯202,204可以具有跨越间隙210的加宽平坦表面206和对应的平坦表面208。通过另一示例,在图6b中,芯222,224可以具有加宽表面226和对应的加宽表面228。作为另一示例,在图6c中,芯242,244可以具有跨越间隙250的v形表面246和对应的表面248。通过另一示例,在图6d中,芯262,264可以具有跨越间隙270的钥匙形表面266和对应的表面268。在备选方面中,任何合适的几何形状可以用于通过间隙传递磁通,该间隙由线性、旋转或任何合适的相对运动而维持。
37.现在参考图7,示出了一个示例性实施例的耦合300的等轴测表示。耦合300可以具有单个初级302和多个次级模块304,306,其可以通过间隙310,312与单个初级模块302相互作用,这里,如图7所示,第一次级304和第二次级306可以独立地在独立运动轴线314,316上移动。还参考图8,示出了一个示例性实施例的耦合350的等轴测表示。这里,耦合350可以使用可以在单个初级模块358中利用的多个初级绕组352,354,356,如图8所示,其中次级360具有与次级运动轴线362的相对移动。还参考图9,示出了一个示例性实施例的耦合400的等轴测表示。这里,如图9所描绘的,耦合400可以具有多个初级模块402,404,406,其可以用于扩展次级410的运动范围408。当使用多个初级线圈和/或初级模块时,可以基于次级模块的位置来从ac电源连续供电或接通/断开它们。
38.例如,如果两个模块位于不同的环境中,则可以在初级模块和次级模块之间利用分离屏障。例如,如果初级模块处于大气环境中并且次级模块位于真空环境中,则分离屏障可以将大气环境与真空环境分离。如在所公开的任何实施例中所描述的,分离屏障可以是导电的或非导电的,并且由合适的材料制成,以允许交变磁通在初级和次级之间传递。所描述的耦合还可以用于在具有相对移动的任何合适的应用中传送信号和/或数据,或者功率、信号和数据的任何组合。通过示例,还参考图10,示出了并入实施例的耦合506的示例性机器人500的表示。这里,图10示意性地描绘了机器人500,其具有机器人驱动器,该机器人驱动器在往返装置504上具有关节臂502,其中功率耦合506用于从往返装置的静止部分508向往返装置的移动部分510和机器人传递功率,其中可以在往返装置的固定部分508和往返装置的移动部分510之间形成间隙以通过空气或其他介质或具有任何合适气体、液体、真空或其他方式的物理分离屏障传递如所描述的交变磁通。作为另一示例,还参考图11,示出了并入实施例的耦合552的示例性机器人550的表示。这里,图11示意性地示出了机器人550,其中此时处于旋转配置的功率耦合552可以用于从机器人的固定部分554向机器人的移动臂556传递功率。这里,可以在机器人的固定部分554和机器人的旋转部分556之间形成间隙,以通过空气或其他介质或通过具有任何合适气体、液体、真空或其他方式的物理分离屏障传递交变磁通。在备选方面中,可以提供具有相对运动的任何合适的应用。
39.如所描述的,功率耦合从固定本体向另一固定本体/多个本体或移动本体/多个本
体或间歇移动的本体/多个本体传送电功率。这里,功率传送可能是通过固定本体和移动本体上的绕组之间的强或弱的电磁耦合。这里,固定本体/多个本体或移动本体/多个本体或间歇移动的本体/多个本体可以是初级和/或次级的任何合适的组合。
40.现在,参考图12,示出了一个示例性实施例的初级600的等轴测表示。这里,固定本体或初级600具有磁通集中器或具有面610,612的初级芯604(诸如但是不限于软铁芯、软磁复合材料或叠层芯)的布置,其具有诸如铜之类的良好导电体的单匝或多匝绕组602。这些绕组602通过变化电压或电流源而被激发,在激励是正弦的场景中,可以生成近似正弦的磁通。个体的磁通发生器被称为初级600。可以使用初级阵列在移动本体的路径中生成变化的磁通。初级的绕组602可以例如经由连接线或连接端606,608电性并联、串联、或各个连接至激励设备,连接到每种配置均有其优点和缺点。在备选方面中,绕组可以延伸初级芯604的全长。还参考图13,示出了一个示例性实施例的次级的650的等轴测表示。移动本体/多个本体还具有磁通集中器或次级芯654(诸如不限于软铁芯、软磁性复合材料或叠层芯)的布置,该次级芯654具有例如通过间隙与面610,612配合的面660,658,其具有良好电导体(诸如铜)的单匝或多匝绕组652,并具有连接端656。被称为次级650的移动本体上的这种布置用来捕获从初级600生成的磁通中的一些磁通。在单个功率传送机构中可以存在单个或多个次级。按照电磁感应定律,这在次级绕组上生成时变电压。电力可以从次级送出。通过示例,绕组可以延伸次级芯的全长。还参考图14,示出了具有多个初级600和次级650的一个示例性实施例的耦合的表示。这里,初级600可以串联接线,其中次级650从在芯中感应的交变磁通获取功率。还参考图15,示出了具有初级600和次级650的一个示例性实施例的耦合的表示。这里,初级600具有初级芯604和具有连接端606,608的绕组602,其中绕组602具有在芯604中感应磁通的交流电。磁通路径710越过间隙712并且通过初级芯604和次级芯654来建立,其中次级650经由次级绕组656从在芯654中感应的交变磁通710获得电力。这里,次级芯656可以具有横向叠层714以减少损失。可替代地,可以使用任何适合的芯。次级线圈上的电压是时变的,例如,本质上接近于正弦波。如果需要dc电压,则基于fet的全波整流器电路或任何合适的电路可以用于将其变换成dc电压。考虑到需要将在初级芯604中生成的磁通与次级654连接起来以及需要使芯材料中的铁损最小的竞争需求,适合使用如图15所示的横向叠层714来制造芯。叠层允许磁通通过空气间隙在初级和次级之间行进,同时使在垂直于磁通流的平面中形成的涡流回路最小。
41.现在,参考图16,示出了一个示例性实施例的耦合800的示意图示,其中该耦合800具有驱动电路,其包括补偿电容器822与初级810和次级812一起使用。电源814将包括电压816和电流820在内的供应测量值818驱动到初级绕组828两端的并联补偿电容器822。可以提供初级绕组828两端的电流824和电压826的范围测量值。初级绕组828与初级芯832组合提供,该初级芯832将磁通引入次级磁芯834,并且将电流引入次级绕组830中。可以提供由次级绕组830提供给负载842的电压836和电流840的次级范围测量值838。这里,由于主磁通路径上的运动所需的空气间隙,导致磁通泄露以及相对于互感的绕组自感,所以功率耦合可以被认为并且被如此分析为与两个或多个具有磁阻的绕组耦合的电磁功率耦合。为了补偿这些自感,可以将电容器(例如,电容器822))并联或串联电性地添加至初级绕组或/和次级绕组。添加电容器822的目的可以是馈送绕组的自感的无功功率需求,从而降低由电源或在次级侧上看到的无功功率需求。在备选方面中,可以提供更多或更少的(多个)电容器。
42.现在,参考图17,示出了一个示例性实施例的初级或次级芯900的等轴测表示。还参考图18,示出了一个示例性实施例的末段906的等轴测表示,例如,各向同性段末端906。初级或次级900具有叠层芯902、绕组904和各向同性末段906,该各向同性末段906在叠层芯902的平坦界面920处与叠层芯902配合。各向同性末段906具有与界面920相对应的类似的平坦界面916并且还具有端匝部分908和与叠层芯902的间隙表面相对应的面910,912。可以通过在绕组904的端匝下面出现的空隙内部引入磁通集中填充物906来改善功率耦合的性能。考虑到几何形状,该填充物不能由叠层制成,而是由软磁性复合材料或类似材料制成。通过示例,图18中示出了这种端件的一种可能布置。
43.按照一个示例性方面,提供一种装置,其包括第一感应段,该第一感应段包括第一芯和第一芯上的第一线圈。第二感应段包括第二芯和第二芯上的第二线圈。第一芯包括轨道延伸部,其中轨道延伸部中的至少两个轨道延伸部从第一芯的相对端延伸,并且其中第二芯包括位于轨道延伸部中的相应的轨道延伸部处的靴部分,其中在轨道延伸部中的每个轨道延伸部和靴部分中的相应的靴部分之间设置有间隙。第二感应段被配置成在沿着延伸部的路径中相对于第一感应段移动,其中第一感应段被配置成在第二感应段中感应电流,包括当第二芯沿着延伸部相对于第一芯移动时,提供第一感应段和第二感应段之间的非接触式感应耦合。
44.在该装置中,延伸部可以包括基本上彼此平行的轨道。在该装置中,延伸部可以包括基本上直的轨道。在该装置中,延伸部可以包括弯曲轨道。在该装置中,延伸部可以包括连接部分,将弯曲轨道连接至其上具有第一线圈的中心部分。在该装置中,弯曲轨道可以各自形成圆形。在该装置中,延伸部可以包括三个或更多个延伸部。在该装置中,至少两个第二感应段可以可移动地位于第一感应段上。在该装置中,第一感应段包括多于一个的第一线圈,其中第一芯中的每个第一芯位于第一芯的单独的中间段上。在该装置中,第一感应段包括多于一个彼此串联定位的第一感应段。在该装置中,第二感应段连接至具有可移动臂的机器人,其中第二感应段在延伸部上相对于第一感应段的移动被配置成沿着路径来移动机器人。在该装置中,第一感应段和第二感应段可以连接至可相对于彼此移动的机器人的不同部件,其中至少一个部件是机器人手臂的连接件。在该装置中,第一芯和/或第二芯具有大致c形的中心段。在该装置中,第一芯和/或第二芯具有具有大致e形的中心段。按照另一示例性方面,一种方法可以包括:提供第一感应段,其包括第一芯和第一芯上的第一线圈,其中第一芯包括轨道延伸部,其中轨道延伸部中的至少两个轨道延伸部从第一芯的相对端延伸。该方法还可以包括:提供第二感应段,其包括第二芯和第二芯上的第二线圈,其中第二芯包括靴部分;以及相对于第一感应段定位第二感应段,其中靴部分位于轨道延伸部中的相应的轨道延伸部处,其中在轨道延伸部中的每个轨道延伸部和靴部分中的相应的靴部分之间设置有间隙,第二感应段被配置成在沿着延伸部的路径中相对于第一感应段移动。第一感应段可以被配置成在第二感应段中感应电流,包括当第二芯沿着延伸部相对于第一芯移动时,提供第一感应段和第二感应段之间的非接触感应耦合。
45.示例性方法还可以包括其中延伸部包括基本上彼此平行的大致直的轨道。示例性方法还可以包括其中延伸部包括弯曲轨道。该示例性方法还可以包括其中延伸部包括三个或更多个延伸部。示例性方法可以进一步包括提供第一感应段包括可移动地位于第一感应段上的至少两个第二感应段。按照另一示例性方面,一种方法可以包括:提供包括第一感应
段和第二感应段的非接触感应耦合,其中第一感应段包括第一芯和第一芯上的第一线圈,其中第一芯包括轨道延伸部,其中轨道延伸部中的至少两个轨道延伸部从第一芯的相对端延伸,并且其中第二感应段包括第二芯和第二芯上的第二线圈,其中第二芯包括靴部分,第二感应该部分相对于第一感应段定位,使得靴部分位于轨道延伸部中的相应的轨道延伸部分处,其中在轨道延伸部中的每个轨道延伸部和靴部分中的相应的靴部分之间设置有间隙,并且使得第二感应段被配置成在沿着延伸部的路径中相对于第一感应段移动;并且在第二感应段沿着第一感应段的延伸部移动的同时,在第一感应段处产生交变磁通并且在第二感应段中由交变磁通感应电流。
46.诸如包括至少一个处理器、至少一个存储器和具有代码的计算机软件的控制器可以用于控制线圈的激励,从而控制轨道/延伸部的移动。
47.应当理解,前面的描述仅仅是说明性的。本领域技术人员可以设计出各种备选方案和修改。例如,各种从属权利要求中阐述的特征可以以任何合适的组合彼此组合。另外,来自上文所描述的不同实施例的特征可以选择性地组合成新的实施例。因而,描述旨在涵盖落在所附权利要求的范围内的所有这样的备选方案、修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1