采用方向盘激活的机动车辆自动变道系统的制作方法
1.本公开总体上涉及用于机动车辆的自动变道系统,具体涉及至少响应于驾驶员抓握方向盘而被激活的自动变道系统。
背景技术:
2.汽车制造商一直致力于研究不需要驾驶员过多干预的自动驾驶员辅助系统。人们把机动车辆自动化划分为数个级别,从零级(机动车辆无自动化,完全由人工控制)到五级(机动车辆完全自动化,无人工控制)。某些系统(如巡航控制、自适应巡航控制和停车辅助系统)对应于较低的自动化级别,而真正的“无人驾驶”机动车辆对应于较高的自动化级别。当驾驶员的操作位置使其能够快速超越(“override”)这些系统以手动操作车辆时,驾驶员可以不激活这些系统。
3.虽然现有的自动驾驶辅助系统实现了其预期目的,但是仍需要一种新型和改进的自动变道系统解决这些问题。
技术实现要素:
4.根据本公开的几个方面,提供了一种用于机动车辆的自动变道系统,该机动车辆具有适于由驾驶员抓握的方向盘。该系统包括一个或多个适于安装在机动车辆上的环境传感器。环境传感器产生输入信号,该输入信号指示以下至少一项:位于距机动车辆一定距离处的对象相对于机动车辆的位置;对象相对于机动车辆的速度;以及至少包括曲率半径的道路几何形状。该系统还包括适于安装在机动车辆上的方向盘传感器。方向盘传感器响应于驾驶员握紧方向盘而产生抓握信号。该系统还包括与环境传感器和方向盘传感器通信的控制器。控制器响应于控制器从环境传感器接收到的输入信号和从方向盘传感器的接收到抓握信号,产生激活信号。该系统还包括一个或多个致动器,该一个或多个致动器与控制器通信并耦接到机动车辆的方向盘、推进机构和制动机构中的至少一个。致动器至少响应于致动器从控制器接收到的激活信号,控制方向盘、推进机构和制动机构中的至少一个,以将机动车辆从当前行驶车道操纵到邻近当前行驶车道的目标行驶车道。
5.在一个方面,致动器配置成当驾驶员手动操作方向盘、推进机构和制动机构中的至少一个时被超越。
6.在另一方面,该系统还包括与控制器通信的用户接口。用户接口响应于用户接口接收到来自驾驶员的相关命令,产生变道请求信号。控制器进一步响应于控制器从用户接口接收到变道请求信号,产生激活信号。
7.在另一方面,用户接口是安装在转向柱上的转向信号杆、安装在方向盘上的开关、触摸屏显示器或与控制器通信并位于机动车辆内的麦克风。
8.在另一方面,方向盘传感器是附接到方向盘的电容传感器、附接到方向盘的电阻传感器、附接到方向盘的静电传感器或相机。环境传感器是相机、激光雷达、近程雷达、远程雷达或超声波传感器。
9.在另一方面,控制器可以配置成进一步响应于控制器将对象的速度与速度阈值进行比较并且确定速度低于速度阈值,产生激活信号。控制器可以配置成进一步响应于控制器将机动车辆和对象之间的距离与距离阈值进行比较并确定该距离高于距离阈值,产生激活信号。控制器可以配置成进一步响应于控制器至少基于曲率半径计算横向加速度,将横向加速度与横向加速度阈值进行比较,并且确定横向加速度低于横向加速度阈值,而产生激活信号。
10.根据本公开的几个方面,机动车辆包括适于由驾驶员抓握的方向盘,其中方向盘控制机动车辆的方向。机动车辆还包括由驾驶员操作的推进机构,用于推进机动车辆。机动车辆还包括用于降低机动车辆速度的制动机构。机动车辆还包括自动变道系统,该系统具有位于机动车辆内的用户接口。用户接口响应于用户接口接收到来自驾驶员的相关命令,产生变道请求信号。该系统还包括安装在机动车辆上的一个或多个环境传感器。环境传感器产生输入信号,该输入信号指示以下至少一项:位于距机动车辆一定距离处的对象相对于机动车辆的位置;对象相对于机动车辆的速度;以及至少包括曲率半径的道路几何形状。该系统还包括安装在机动车辆上的方向盘传感器。方向盘传感器响应于驾驶员握紧方向盘而产生抓握信号。该系统还包括与环境传感器和方向盘传感器通信的控制器。控制器响应于控制器从环境传感器接收到的输入信号和从方向盘传感器接收到的抓握信号,产生激活信号。该系统还包括与控制器通信并耦接到方向盘、推进机构和制动机构的一个或多个致动器。致动器至少响应于致动器从控制器接收到的激活信号,控制方向盘、推进机构和制动机构中的至少一个,以将机动车辆从当前行驶车道操纵到邻近当前行驶车道的目标行驶车道。该系统还包括通知装置,用于响应于通知装置从控制器接收到激活信号,向驾驶员指示致动器正在将机动车辆从当前行驶车道操纵到目标行驶车道。
11.在一个方面,控制器响应于控制器从用户接口接收到变道请求信号并且控制器没有从方向盘传感器接收到抓握信号,产生指令信号。通知装置响应于通知装置从控制器接收到指令信号,指示驾驶员握紧方向盘。
12.在另一方面,通知装置可以是显示屏,显示屏配置成响应于显示屏从控制器接收到指令信号,显示与抓握方向盘的指令相关联的文本或符号。通知装置可以是安装在方向盘上的指示灯或机动车辆的仪表组。通知装置配置成响应于指示灯从控制器接收到指令信号,发出与指令相关联的预定颜色的灯光。通知装置可以是扬声器,配置成响应于扬声器从控制器接收到指令信号而发出听觉指令。通知装置可以是安装在位于机动车辆内的机动车辆座椅上的振动装置。振动装置可以配置成响应于振动装置从控制器接收到指令信号而振动。
13.在另一方面,致动器配置成当驾驶员手动操作方向盘时被超越。
14.在另一方面,当机动车辆不牵引拖车时,距离阈值是参考查找表中至少基于对象相对于机动车辆的速度和仅机动车辆的长度的预定经验值。
15.在另一方面,用户接口或环境传感器配置成输入由机动车辆牵引的拖车的长度。控制器基于对象相对于机动车辆的速度以及机动车辆和拖车的组合长度,确定更新的距离阈值是参考查找表中的预定经验值。
16.在另一方面,环境传感器产生位置信号,该位置信号指示机动车辆位于目标行驶车道。控制器响应于控制器从环境传感器接收到位置信号,产生终止信号。通知装置响应于
通知装置从控制器接收到终止信号,指示系统停用。
17.在另一方面,控制器响应于控制器从用户接口接收到变道请求信号,启动计时器。控制器进一步响应于控制器在预定时间量内没有从方向盘传感器接收到抓握信号,产生终止信号。
18.根据本公开的几个方面,提供了一种机动车辆的自动变道系统的操作方法。机动车辆包括可由驾驶员手动操作的方向盘、推进机构和制动机构。该系统包括用户接口、至少一个环境传感器、方向盘传感器、控制器、致动器和通知装置。用户接口响应于用户接口接收到来自驾驶员的相关命令,产生变道请求信号。环境传感器产生输入信号,该输入信号至少指示:位于距机动车辆一定距离处的对象相对于机动车辆的位置;对象相对于机动车辆的速度;以及至少包括曲率半径的道路几何形状。方向盘传感器响应于驾驶员握紧方向盘而产生抓握信号。控制器响应于控制器从用户接口接收到变道请求信号、从环境传感器接收到输入信号以及从方向盘传感器接收到抓握信号,产生激活信号。致动器至少响应于致动器从控制器接收到激活信号而控制方向盘、推进机构和制动机构,以将机动车辆从当前行驶车道操纵到邻近当前行驶车道的目标行驶车道。通知装置响应于通知装置从控制器接收到激活信号,向驾驶员指示致动器正在将机动车辆从当前行驶车道操纵到目标行驶车道。
19.在一个方面,驾驶员通过手动操作方向盘、推进机构和制动机构中的至少一个而超越致动器。
20.在另一方面,控制器响应于控制器从用户接口接收到变道请求信号并且没有从方向盘传感器接收到抓握信号,产生指令信号。通知装置响应于通知装置从控制器接收到指令信号,指示驾驶员握紧方向盘。
21.在另一方面,当机动车辆没有牵引拖车时,控制器确定距离阈值是参考查找表中的预定经验值,该预定经验值至少基于对象相对于机动车辆的速度和仅机动车辆的长度。此外,当机动车辆牵引拖车时,控制器还确定距离阈值是参考查找表中更新的经验牵引值,该更新经验牵引值基于机动车辆和拖车的组合长度以及对象相对于机动车辆的速度。
22.在另一方面,控制器响应于控制器将对象的速度与速度阈值进行比较并确定速度低于速度阈值,产生激活信号。控制器响应于控制器将机动车辆和对象之间的距离与距离阈值进行比较并确定该距离高于距离阈值,产生激活信号;控制器响应于控制器至少基于曲率半径计算横向加速度,将横向加速度与横向加速度阈值进行比较并确定横向加速度低于横向加速度阈值,产生激活信号。
23.在另一方面,控制器响应于控制器从用户接口接收到变道请求信号,启动计时器。环境传感器产生指示机动车辆位于目标行驶车道的位置信号。控制器响应于以下至少一项而产生终止信号:控制器从环境传感器接收到位置信号;以及控制器在预定时间内没有从方向盘传感器接收到抓握信号。通知装置响应于通知装置从控制器接收到终止信号,指示系统停用。
24.根据本文提供的描述,在其他领域的应用将变得显而易见。应当理解,该描述和具体实例仅仅是为了说明的目的,而不是为了限制本公开的范围。
附图说明
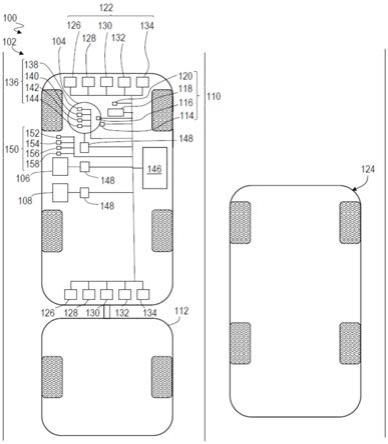
25.图1是具有自动变道系统的机动车辆的一个实例的示意图。
26.图2是图1的自动变道系统的操作方法的一个实例的流程图。
具体实施方式
27.以下描述本质上仅仅是示例性的,并不是为了限制本公开、应用或使用。
28.一种用于机动车辆的示例性自动变道系统指示驾驶员抓握方向盘,以使该系统能够自动操纵车辆变道。当致动器控制方向盘以将机动车辆从当前行驶车道操纵到目标行驶车道时,驾驶员可以超越致动器,并在操纵期间在任何方向上操纵机动车辆。可以设想,该方法和系统可以响应于驾驶员操纵车辆的其他部分而被启用或超越。
29.参考图1,示出了机动车辆100的一个实例,该机动车辆100具有用于机动车辆的自动变道系统102(以下简称“系统”)。机动车辆100包括用于控制机动车辆100的机动性的多个机构。机动车辆100包括方向盘104,方向盘104适于由驾驶员抓握,用于控制机动车辆100的方向。机动车辆100还包括由驾驶员操作的推进机构106,用于推进机动车辆100。机动车辆100还包括用于降低机动车辆100速度的制动机构108。
30.机动车辆100还包括自动变道系统102(“系统”),用于接收来自驾驶员的命令并操作一个或多个机构,所述机构控制机动车辆100从当前行驶车道移动到目标行驶车道。更具体地,系统102包括位于机动车辆100内的用户接口110,并且用户接口110响应于用户接口110接收到来自驾驶员的相关命令而产生变道请求信号。在一个实例中,驾驶员的命令可以包括数据,例如由机动车辆100牵引的拖车112的长度、宽度、高度、重量或其他合适的参数。但是,可以设想,数据可以由包括环境传感器的其他装置提供或输入,如下文所详细描述。
31.用户接口110可以是转向信号杆114,其响应于驾驶员在与机动车辆100左转相关联的方向或与机动车辆100右转相关联的方向上移动转向信号杆114而产生变道请求信号。用户接口110的另一非限制性实例可以是安装在方向盘104上的开关116,该开关116响应于驾驶员操作开关116而产生变道请求信号。用户接口110的又一非限制性实例可以是触摸屏显示器118、麦克风120,或响应于驾驶员操作装置输入相关命令而产生变道请求信号的其他合适装置。可以设想,该系统可以包括响应于来自驾驶员的命令而产生变道请求信号的任何合适的用户接口。
32.系统102还包括适于以后向、前向、侧向或其任意组合的方向安装到机动车辆100上的一个或多个环境传感器122。环境传感器122产生指示位于机动车辆100外部的对象124相对于机动车辆100的位置的输入信号。例如,输入信号可以指示目标行驶车道内和机动车辆100后方50英尺处有对象。对象的非限制性实例包括其他机动车辆、自行车、行人、道路建筑或大的道路碎片。输入信号可以进一步指示对象相对于机动车辆100的速度。在另一实例中,输入信号可以表示拖车数据,例如由机动车辆100牵引的拖车112的长度、宽度、高度、重量或其他合适的参数。在又一实例中,输入信号可以指示道路几何形状(例如曲率半径或车道宽度)以及道路状况(例如道路结冰状况)。环境传感器122可以进一步产生指示机动车辆100位于目标行驶车道的位置信号。
33.环境传感器的非限制性实例可以包括远程雷达传感器126、短程雷达传感器128、激光雷达传感器130、相机132、超声波传感器134、其他合适的传感器或其任意组合。可以设
想,也可以在v2x环境下从其他车辆或基础设施接收输入信号。
34.系统102还包括安装在机动车辆100上的方向盘传感器136。方向盘传感器136响应于驾驶员抓握方向盘104而产生抓握信号。方向盘传感器136的非限制性实例可以包括电容传感器138、电阻传感器140、静电传感器142、相机144、配置成检测驾驶员将手放在方向盘上的其他合适的传感器或其组合。可以预期,该系统可以仅包括这些方向盘传感器中的一个。然而,在其他实例中,系统可以包括这些传感器的组合。
35.系统102还包括与用户接口、环境传感器122和方向盘传感器136通信的控制器146。根据与通知装置相关联的更详细的描述,控制器146响应于控制器146从用户接口110接收到变道请求信号,产生指令信号并启动定时器。控制器146进一步响应于控制器146接收到来自方向盘传感器136的抓握信号和来自环境传感器122的输入信号,产生激活信号。
36.更具体地,在该实例中,控制器146可以响应于控制器146将与输入信号相关联的数据与相应的阈值进行比较,产生激活信号。继续前面的实例,控制器146可以响应于控制器146将对象124的速度与速度阈值进行比较并确定速度低于速度阈值,产生激活信号。控制器146可以响应于控制器146将机动车辆100和对象124之间的距离与距离阈值进行比较并确定该距离高于距离阈值,产生激活信号。控制器146可以响应于控制器146基于曲率半径计算横向加速度,将横向加速度与横向加速度阈值进行比较并确定横向加速度低于横向加速度阈值,产生激活信号。在其他实例中,控制器不计算将要行驶道路或当前道路的横向加速度,而是比较由加速度计测量的实时横向加速度。可以设想,控制器可以响应于控制器将对象、道路本身或其组合的其他属性与相关联的阈值进行比较,产生激活信号。
37.在该实例中,距离阈值是参考查找表中的预定经验值,当机动车辆100没有牵引拖车112时,该预定经验值至少基于对象124相对于机动车辆100的速度和仅机动车辆100的长度。此外,用户接口110、环境传感器122或其组合可以配置成输入由机动车辆100牵引的拖车112的长度。控制器146可以确定更新的距离阈值是参考查找表中的预定经验值,该更新距离阈值基于机动车辆100和拖车112的组合长度,以及对象124相对于机动车辆100的速度。控制器146进一步响应于控制器146从环境传感器122接收到位置信号,或者控制器146在计时器启动后的预定时间内没有从方向盘传感器136接收到抓握信号,产生终止信号。
38.在一个实例中,控制器可以是处理来自所有环境传感器的输入信号的外部对象计算模块(external object computing module,“eocm”)。eocm执行传感器融合算法,该算法可提高最终对象动态属性(包括位置、速度、对象类型和其他合适的参数)的保真度。一旦创建了融合对象,就将这些对象输入威胁评估算法,该算法基于其位置、相对速度以及机动车辆100的计划路径,确定这些对象是否对机动车辆100构成威胁。
39.该系统还包括一个或多个致动器148,该一个或多个致动器148与控制器146通信并耦接到方向盘104、推进机构106和制动机构108中相关联的一个。致动器148响应于致动器148从控制器146接收到激活信号,控制方向盘104、推进机构106和制动机构108中相关联的一个。更具体地,在该实例中,一个致动器148至少响应于该致动器148从控制器146接收到激活信号,控制方向盘104,以将机动车辆100从当前行驶车道操纵到目标行驶车道。致动器148配置成当驾驶员手动操作方向盘104、推进机构106、制动机构108或其任意组合时而被超越。
40.系统102还包括通知装置150,用于响应于通知装置150从控制器146接收到指令信
号,指示驾驶员握紧方向盘。通知装置150响应于通知装置150从控制器146接收到激活信号,进一步向驾驶员指示一个或多个致动器148正在将机动车辆100从当前行驶车道操纵到目标行驶车道。通知装置150响应于通知装置150从控制器146接收到终止信号,进一步指示系统102停用。作为一个非限制性实例,通知装置150可以是显示屏xx,显示屏xx配置成响应于显示屏152从控制器146接收到指令信号,显示与抓握方向盘的指令相关联的文本或符号。作为另一个非限制性实例,通知装置150可以是安装在机动车辆100的方向盘104或仪表组上的指示灯154,并且指示灯154可以配置成响应于指示灯154从控制器146接收到指令信号,发出与指令相关联的预定颜色的灯光。通知装置150的另一个非限制性实例可以包括扬声器156,该扬声器156配置成响应于扬声器156从控制器146接收到指令信号,向驾驶员发出抓握方向盘104的听觉指令。在又一个非限制性实例中,通知装置150可以是振动装置158,该振动装置158安装在机动车辆100内的车辆座椅上,并且配置成响应于振动装置158从控制器146接收到指令信号而振动。
41.参考图2,示出了图1的系统的操作方法200的一个实例的流程图。方法200开始于框202,用户接口110响应于用户接口从驾驶员接收到相关命令,产生变道请求信号。在机动车辆100牵引拖车的一个实例中,该命令可以包括关于拖车的数据(包括拖车的长度、宽度、高度、重量和其他合适的特征)。在一个非限制性实例中,该步骤可以通过驾驶员在与机动车辆左转相关联的方向或与机动车辆右转相关联的方向上移动转向信号杆114完成,这继而使得转向信号杆产生相关联的变道请求信号。在另一个非限制性实例中,该步骤可以通过驾驶员操作安装在方向盘上的开关116完成,这继而使得开关产生相关联的变道请求信号。在又一个非限制性实例中,驾驶员可以输入相关联的命令以操作触摸屏显示器118、麦克风120或其他合适的装置,这继而产生变道请求信号。
42.在框204处,控制器146响应于控制器146从用户接口110接收到变道请求信号,启动计时器并产生指令信号。通知装置150响应于通知装置从控制器146接收到指令信号,指示驾驶员抓握方向盘104。
43.在框206处,控制器146将经过的时间量与预定时间量进行比较。如果经过的时间量小于预定时间量,则该方法前进到框208。如果经过的时间量等于或大于预定时间量,则该方法前进到框220。
44.在框208处,环境传感器122产生至少指示机动车辆100和位于机动车辆100外部的对象124之间的距离的输入信号。此外,环境传感器122产生进一步指示对象相对于机动车辆100的速度的输入信号。
45.在框210处,控制器146确定驾驶员是否位于超越系统102的位置。在该实例中,如果控制器146确定控制器146已经从方向盘传感器136接收到抓握信号,则该方法前进到框212。如果控制器146确定控制器146没有接收到抓握信号,则该方法返回到206。
46.在框212处,控制器146确定自主操纵是否可行。继续前面的实例,该步骤可以通过控制器146将对象的测量参数与阈值进行比较而完成。更具体地,控制器146将对象的速度与速度阈值进行比较,将机动车辆和对象之间的距离与距离阈值进行比较,将横向加速度与横向加速度阈值进行比较。可以设想,控制器可以将对象的任何其他属性、道路本身或其任意组合与阈值进行比较。
47.更具体地,控制器146响应于控制器146从用户接口110接收到变道请求,确定与机
动车辆100和由机动车辆100牵引的任何拖车112相关联的数据。当车辆牵引拖车时,该数据可以是车辆或车辆和拖车组合的长度、宽度、高度或重量。此外,控制器146可以访问参考查找表以确定与数据相关联的阈值。例如,当控制器146确定机动车辆100没有牵引拖车时,控制器继而可以至少基于对象相对于机动车辆的速度和仅机动车辆的长度,确定距离阈值是参考查找表中的预定经验值。当控制器146确定机动车辆100正在牵引拖车时,控制器146继而可以基于机动车辆和拖车的组合长度以及对象相对于机动车辆的速度,确定更新的距离阈值是参考查找表中的预定经验值。
48.如果控制器146确定速度低于速度阈值,距离高于距离阈值,并且横向加速度低于横向加速度阈值,则该方法前进到框214。如果控制器146确定速度高于速度阈值、距离低于距离阈值或者横向加速度高于横向加速度阈值,则该方法返回到框206。
49.在框214处,控制器146响应于控制器146确定与变道请求相关联的数据不超过相关联的阈值,产生激活信号。
50.在框216处,致动器148至少响应于致动器148从控制器146接收到激活信号,控制方向盘104、推进机构106和制动机构108中的至少一个,以将机动车辆100从当前行驶车道操纵到目标行驶车道。另外,通知装置150向驾驶员指示致动器148正在将机动车辆100从当前行驶车道操纵到目标行驶车道。在该操纵过程中,例如当驾驶员选择的路径不同于机动车辆100的当前计划路径时,手放在方向盘104上的驾驶员可以通过手动操作方向盘104以及推进机构106和制动机构108,超越致动器148。
51.在框218处,环境传感器122产生指示机动车辆100位于目标行驶车道的位置信号。
52.在框220处,控制器响应于以下至少一项而产生终止信号:控制器从环境传感器122接收到位置信号;以及控制器146在预定的时间量内没有接收到来自方向盘传感器136的抓握信号。通知装置150响应于通知装置150从控制器146接收到终止信号,指示系统停用和/或转向控制权已交给驾驶员。
53.本公开的描述本质上仅仅是示例性的,并且不脱离本公开的一般意义的变化均落入本公开的范围内。这种变化不应视为脱离本公开的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1