驾驶辅助装置的制作方法
1.本发明涉及一种驾驶辅助装置。
背景技术:
2.目前公开了一种信息处理装置,在执行自动驾驶时,停止自动驾驶的至少一部分,使驾驶员进行切换为由车辆的驾驶员驾驶的练习(例如,参考专利文献1)。
3.[现有技术文献]
[0004]
(专利文献)
[0005]
专利文献1:日本特开2017-199299号公报
技术实现要素:
[0006]
[发明所要解决的问题]
[0007]
但是,由于专利文献1所述的信息处理装置是在车辆的行驶过程中进行练习,因此,车辆1的驾驶员无法从容地进行练习。
[0008]
因此,本发明的目的在于提供一种驾驶辅助装置,可以高效地进行用于驾驶辅助的练习。
[0009]
[发明所要解决的问题]
[0010]
本公开的一方式的驾驶辅助装置(例如,后述的驾驶辅助装置11),搭载在移动体(例如,后述的车辆1)上,可以执行用于控制前述移动体的转向及/或制动的驾驶辅助,并且所述驾驶辅助装置具备:驾驶辅助执行部(例如,后述的驾驶辅助执行部201),如果前述移动体的驾驶员使用设置在前述移动体内的规定操作件进行规定操作,则执行前述驾驶辅助;及,驾驶辅助练习控制部(例如,后述的驾驶辅助练习控制部202),执行让前述移动体的驾驶员练习前述规定操作所需的的驾驶辅助练习处理;其中,前述驾驶辅助练习控制部在前述移动体启动后且在停车状态下执行前述驾驶辅助练习处理。
[0011]
另外,前述规定操作件包括制动踏板、方向盘、及配置在前述方向盘上的自动驾驶执行按钮或方向指示灯。
[0012]
另外,前述移动体具备在前述移动体的外部进行显示的外部显示装置(例如,后述的照明装置8),前述驾驶辅助装置还具备显示控制部(例如,后述的显示控制部203),所述显示控制部控制为,当在前述移动体的行驶过程中进行前述操作件的任意一个操作时、或在执行前述驾驶辅助的过程中,使前述外部显示装置向外部显示,并且控制为,在执行前述驾驶辅助练习处理的过程中,不使前述外部显示装置向外部显示。
[0013]
另外,在前述驾驶辅助练习处理中,前述驾驶辅助练习控制部可以练习在朝向虚拟对象行驶的前述移动体中执行碰撞减轻制动,如果在前述移动体的行驶过程中运行前述碰撞减轻制动,则前述显示控制部控制为,在前述移动体内的显示部(例如,后述的显示装置92)及前述外部显示装置上,显示前述碰撞减轻制动正在运行,如果在执行前述驾驶辅助练习处理过程中运行前述碰撞减轻制动,则前述显示控制部在前述显示部上显示前述碰撞
减轻制动正在运行,但不在前述外部显示装置上进行显示。
[0014]
另外,前述驾驶辅助练习控制部将与前述驾驶辅助练习处理有关的数据,记录在配置在前述移动体内的便携通信装置(例如,后述的便携通信装置100)中,前述便携通信装置藉由与前述驾驶辅助装置通信而执行前述驾驶辅助练习处理,前述便携通信装置伴随前述移动体的停车状态的解除,而限制前述驾驶辅助练习处理。
[0015]
(发明的效果)
[0016]
根据本发明,能够提供一种驾驶辅助装置,可以高效地进行用于驾驶辅助的练习。
附图说明
[0017]
图1是绘示出本实施方式的车辆的构成的框图。
[0018]
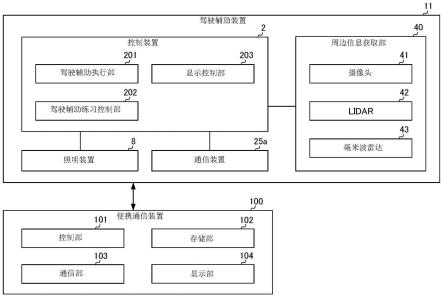
图2是绘示出本实施方式的车辆的驾驶辅助装置的功能构成的图。
[0019]
图3是绘示驾驶辅助练习处理的具体例的图。
[0020]
图4是绘示驾驶辅助练习处理的具体例的图。
[0021]
图5是绘示本实施方式的驾驶辅助装置的处理的流程图。
具体实施方式
[0022]
以下,参考附图,对本发明的驾驶辅助装置的实施方式进行说明。
[0023]
图1是绘示出本实施方式的车辆1的构成的框图。图1结合平面图和侧视图来示出车辆1的轮廓。车辆1例如是轿车型四轮乘用车。
[0024]
车辆1具备控制装置2。控制装置2包括可以经由车载网络而通信连接的多个电子控制单元(electronic control unit;ecu)(自动驾驶ecu 20~停止控制ecu 29)。各ecu作为计算机发挥功能,所述计算机包括以cpu为代表的处理器、半导体存储器等的存储设备、及相对于外部设备的接口等。在存储设备中存储处理器所执行的程序和处理器所用于处理的数据等。各ecu也可以具备多个处理器、存储设备、及接口等。
[0025]
以下,对各自动驾驶ecu 20~停止控制ecu 29的功能等进行说明。此外,可以对ecu的数量及负责的功能进行适当设计,也可以对本实施方式所示的ecu进行细化或集成。
[0026]
自动驾驶ecu 20执行与车辆1的自动驾驶有关的控制。在自动驾驶中,自动驾驶ecu 20对车辆1的转向以及加速和减速中的至少任意一种进行自动控制。
[0027]
转向ecu 21对电动助力转向装置3进行控制。电动助力转向装置3包括根据驾驶员对方向盘31的驾驶操作(转向操作)来使前轮进行转向的机构。另外,电动助力转向装置3包括:用于辅助转向操作或施加自动转向前轮所需的驱动力的电动机、和检测转向角的传感器等。当车辆1的驾驶状态为自动驾驶时,转向ecu 21响应于来自自动驾驶ecu 20的指示,来对电动助力转向装置3进行自动控制,而控制车辆1的行进方向。
[0028]
行驶辅助ecu 22及23对检测车辆周围状况的摄像头41、lidar 42及毫米波雷达43进行控制及检测结果的信息处理。摄像头41对车辆1的前方、侧方及后方进行摄像。在本实施方式的情况下,在车辆1的前部设置两个摄像头41,在侧部及后部各设置一个摄像头41。行驶辅助ecu 22及23藉由分析摄像头41拍摄到的图像,可以提取目标轮廓和道路上的车道标记(白线等)。
[0029]
lidar 42是光检测和测距(light detection and ranging;lidar),用于检测车
辆1的周围的目标,并测量与目标的距离。在本实施方式的情况下,设置五个lidar 42,车辆1的前部的各角部各设置一个,后部中央设置一个,后部各侧方各设置一个。
[0030]
毫米波雷达43检测车辆1的周围的目标,并测量与目标的距离。在本实施方式的情况下,设置五个毫米波雷达43,车辆1的前部中央设置一个,前部的各角部各设置一个,后部各角部各设置一个。
[0031]
行驶辅助ecu 22对车辆1的前部的一个摄像头41和各lidar 42进行控制及检测结果的信息处理。行驶辅助ecu 23对车辆1的前部的另一个摄像头41和各毫米波雷达43进行控制及检测结果的信息处理。藉由具备两组用于检测车辆1的周围状况的ecu,可以提高检测结果的可靠性,另外,藉由具备摄像头41、lidar 42、及毫米波雷达43这些不同种类的检测单元,可以多方面地对车辆1的周边环境进行分析。
[0032]
位置识别ecu 24对陀螺仪传感器5、gps传感器24b、及通信装置24c进行控制及检测结果或通信结果的信息处理。陀螺仪传感器5检测车辆1的旋转运动。位置识别ecu 24可以藉由陀螺仪传感器5的检测结果和车轮速度等来判断车辆1的前进路线。
[0033]
gps传感器24b检测车辆1的当前位置。通信装置24c与提供地图信息、交通信息等的服务器进行无线通信,以获取这些信息。位置识别ecu 24可以访问存储设备中构建的地图信息的数据库24a,并且位置识别ecu 24可以搜索从当前位置到目的地的路线等。
[0034]
ecu 24、地图信息的数据库24a及gps传感器24b构成所谓的导航装置。
[0035]
通信控制ecu 25具备用于车辆与车辆之间通信的通信装置25a。通信装置25a与周边的另一车辆进行无线通信,而在车辆之间进行信息交换。
[0036]
驱动控制ecu 26控制动力装置6。动力装置6是输出使车辆1的驱动轮旋转的驱动力的机构,例如包括发动机和变速器。驱动控制ecu 26例如响应于由设置在加速器踏板7a上的操作检测传感器7d检测到的驾驶员的驾驶操作(加速器操作或者加速操作),来控制发动机的输出。且,驱动控制ecu 26基于车速传感器7c检测到的车速等信息,来切换变速器的变速级。当车辆1的驾驶状态为自动驾驶时,驱动控制ecu 26响应于来自自动驾驶ecu 20的指示,来对动力装置6进行自动控制,而控制车辆1的加速和减速。
[0037]
车辆外部通知控制ecu 27对方向指示器(转向灯)8a、前灯8b、尾灯8c及刹车灯8d等的照明装置8(参考后述的图3)进行控制。在图1的例中,方向指示器8a设置在车辆1的前部、门镜及后部。前灯8b设置在车辆1的前部,尾灯8c及刹车灯8d设置在车辆1的后部。另外,照明装置8可以具有用于向外部显示正在执行自动驾驶的自动驾驶显示灯(未图示)。
[0038]
车辆内部通知控制ecu 28对输入/输出装置9进行控制。输入/输出装置9将信息输出给驾驶员并接受来自驾驶员的信息输入。输入/输出装置9具有语音输出装置91、显示装置92、显示装置93、及输入装置94。
[0039]
语音输出装置91藉由语音向驾驶员通知信息。
[0040]
显示装置92藉由显示图像向驾驶员通知信息。显示装置92配置在例如驾驶座的正面,而构成仪表板等。
[0041]
进一步,输入/输出装置9具有显示装置93,所述显示装置93配置在驾驶席的左侧,并显示来自导航装置等的信息。
[0042]
此外,此处,虽然列举了语音和显示,但输入/输出装置9也可以使用振动和光来通知信息。另外,输入/输出装置9也可以将语音、显示、振动或光中的多个组合起来进行通知。
进一步,根据要通知的信息的级别(例如紧急程度),输入/输出装置9可以具有不同的组合,或不同的通知方式。
[0043]
输入装置94配置在驾驶员可操作的位置,是对车辆1进行指示的开关组,但也可以包括语音输入装置。
[0044]
停止控制ecu 29对制动装置10和驻车制动器(未图示)等进行控制。制动装置10例如是盘式制动装置,其设置在车辆1的各车轮上,并藉由对车轮的旋转施加阻力来使车辆1减速或停止。
[0045]
停止控制ecu 29例如响应于由设置在制动踏板7b上的操作检测传感器7e检测到的驾驶员的驾驶操作(制动操作),来控制制动装置10的操作。当车辆1的驾驶状态为自动驾驶时,停止控制ecu 29响应于来自ecu 20的指示,来对制动装置10进行自动控制,而控制车辆1的减速及停止。也可以操作制动装置10和驻车制动器,以维持车辆1的停止状态。另外,当动力装置6的变速器具备停车锁定机构时,也可以操作该停车锁定机构以维持车辆1的停止状态。
[0046]
车辆1还具备驾驶员监控摄像头50,其获取与车辆1的乘客有关的乘客信息,作为拍摄图像。驾驶员监控摄像头50例如由利用电荷耦合器件(charge coupled device;ccd)、或互补金属氧化物半导体(complementary metal oxide semiconductor;cmos)等的固体摄像元件的数码摄像头构成,其种类没有特别限定。驾驶员监控摄像头50配置在车辆1的左右方向的中央。例如,驾驶员监控摄像头50设置在显示装置92的附近,也可以配置在车辆1的左右方向的中央。
[0047]
本实施方式的车辆1的控制功能包括与车辆1的驱动、制动、转向的控制有关的行驶相关功能、及与对驾驶员告知信息有关的告知功能。
[0048]
车道保持控制是指车辆相对于车道的位置的控制的一种,并且是使车辆在设置于车道内的行驶轨迹上自动(不依靠驾驶员的驾驶操作)行驶的控制。
[0049]
车道偏离抑制控制是指车辆相对于车道的位置的控制的一种,用于检测白线或中央分割带,并进行自动转向,以免车辆越线。这样一来,车道偏离抑制控制及车道保持控制具有不同的功能。
[0050]
车道变更控制是指,车辆从行驶中的车道向相邻车道自动移动车辆的控制。
[0051]
前方行驶车辆跟随控制是指,自动跟随在本车辆的前方行驶的另一车辆的控制。
[0052]
碰撞减轻制动控制是指,在与车辆前方的障碍物发生碰撞的可能性增大的情况下,自动制动来辅助避免碰撞的控制。
[0053]
误起步抑制控制是指,在车辆停止状态下驾驶员所进行的加速操作大于等于规定量的情况下,限制车辆的加速的控制,以抑制突然起步。
[0054]
相邻车辆告知控制是指,告知驾驶员存在另一车辆在与本车辆的行驶车道相邻的相邻车道上行驶,例如,告知存在另一车辆在本车辆的侧方、后方行驶。
[0055]
前方行驶车辆起步告知控制是指,告知本车辆及其前方的另一车辆处于停止状态,而前方的另一车辆已经起步的控制。可以由上述的车辆内部通知设备进行这些告知。
[0056]
在本说明书中,自动驾驶是指由控制装置2进行一部分或全部的驾驶操作(加速、制动及转向),而不是由驾驶员进行。亦即,自动驾驶不仅包括由控制装置2进行全部的驾驶操作(所谓的完全自动驾驶),还包括由控制装置2仅进行一部分的驾驶操作的方式(所谓的
驾驶辅助)。
[0057]
作为驾驶辅助的例子,可以列举车速控制功能、车距控制(adaptive cruise control(acc))功能、车道偏离防止辅助(lane keeping assist system(lkas))功能、碰撞避免辅助功能、碰撞减轻制动(collision mitigation brake system(cmbs))控制等。
[0058]
以下对本实施方式的车辆1的驾驶辅助装置11的处理进行说明。
[0059]
图2是绘示出本实施方式的车辆1的驾驶辅助装置11的功能构成的图。如图2所示,驾驶辅助装置11具备控制装置2、照明装置8、通信装置25a、及周边信息获取部40。
[0060]
另外,驾驶辅助装置11可以经由通信装置25a与便携通信装置100进行无线通信。便携通信装置100具备控制部101、存储部102、通信部103、及显示部104。
[0061]
控制装置2具备驾驶辅助执行部201、驾驶辅助练习控制部202、及显示控制部203。周边信息获取部40具备上述的摄像头41、lidar 42、及毫米波雷达43。
[0062]
周边信息获取部40获取车辆1的周边的周边信息。例如,周边信息获取部40获取车辆1的前方、侧方、及后方的周边信息。周边信息是例如由摄像头41获取的车辆1的前方、侧方、及后方周边的图像。另外,周边信息也可以是例如由lidar 42或毫米波雷达43获取的车辆1的前方、侧方、及后方周边的数据。
[0063]
便携通信装置100的控制部101是控制整个便携通信装置100的部分,藉由适时读出并执行存储在存储部102中的各种程序,来实现本实施方式中的各种功能。控制部101也可以是中央处理器(central processing unit;cpu)。
[0064]
存储部102是将硬件组用作便携通信装置100而发挥功能的各种程序、及各种数据等的存储区域,并且可以是rom、ram、闪存或硬盘(hdd)等。具体而言,存储部102存储使控制部101执行本实施方式的各功能的程序等。
[0065]
通信部103进行用于使便携通信装置100与外部机器进行通信的通信控制。具体而言,通信部103支持特定通信协议(例如,wifi、3g、4g、5g等)。通信部103使用这些通信协议,来根据控制部101的控制与外部设备进行通信。
[0066]
便携通信装置100可以藉由通信部103与驾驶辅助装置11进行通信,并将用于驾驶辅助的应用程序存储在存储部102中。而且,用于驾驶辅助的应用程序藉由从驾驶辅助装置11接收数据,来执行用于驾驶辅助练习处理的图像显示及语音的输出等的处理。
[0067]
如果车辆1的驾驶员使用设置在车辆1内的规定操作件来进行规定操作,则驾驶辅助执行部201执行驾驶辅助。此处,规定操作件包括例如制动踏板7b、方向盘31、配置在方向盘31上的自动驾驶执行按钮或方向指示灯8a。另外,规定操作是用于使用规定操作件来执行驾驶辅助的操作。
[0068]
驾驶辅助练习控制部202执行让车辆1的驾驶员练习规定操作所需的驾驶辅助练习处理。此处,驾驶辅助练习控制部202在车辆1启动后(例如,点火电源打开后)且在停车状态下,执行驾驶辅助练习处理。
[0069]
具体而言,如果驾驶辅助练习控制部202在车辆1启动后(例如,点火电源打开后)且在停车状态下,操作自动驾驶执行按钮,则不执行自动驾驶,而是转至用于执行驾驶辅助练习处理的驾驶辅助练习模式。
[0070]
此处,驾驶辅助练习模式是对显示在显示装置93上的虚拟车辆反映用于驾驶辅助的操作,而不是实际执行自动驾驶。
[0071]
在驾驶辅助练习模式中,驾驶辅助练习控制部202执行例如上述的车速控制功能、车距控制(adaptive cruise control(acc))功能、车道偏离防止辅助(lane keeping assist system(lkas))功能、碰撞避免辅助功能、碰撞减轻制动控制等的用于练习驾驶辅助的驾驶辅助练习处理。
[0072]
显示控制部203控制为,当在车辆1的行驶过程中进行操作件的任意一种操作时、或在执行驾驶辅助的过程中,使显示装置92进行显示,并且使在车辆1的外部进行显示的照明装置8向外部进行显示。此处,显示控制部203在车辆1的行驶过程中、或在执行驾驶辅助的过程中,使显示装置92显示为表示在行驶过程中或在执行驾驶辅助过程中。另外,显示控制部203在车辆1的行驶过程中或在执行驾驶辅助的过程中,使照明装置8显示为表示在行驶过程中或在执行驾驶辅助过程中。
[0073]
进一步,显示控制部203控制为,在执行驾驶辅助练习处理的过程中,使显示装置92进行显示,但不使照明装置8向外部进行显示。
[0074]
亦即,显示控制部203在车辆1的行驶过程中或在执行驾驶辅助的过程中,向车辆1的内部及外部进行显示。另外,显示控制部203在执行驾驶辅助练习处理的过程中,向车辆1的内部进行显示,但不向车辆1的外部进行显示。
[0075]
另外,显示控制部203也可以控制为,在执行驾驶辅助练习处理的过程中,仅使照明装置8向外部进行显示,所述照明装置8对应于与驾驶辅助练习相关的操作件。例如,显示控制部203也可以控制为,在执行用于碰撞减轻制动控制的驾驶辅助练习处理的过程中,仅使与制动踏板7b对应的刹车灯8d向外部进行显示。
[0076]
另外,在驾驶辅助练习处理中,驾驶辅助练习控制部202可以练习在朝向虚拟对象行驶的虚拟车辆中执行碰撞减轻制动。
[0077]
显示控制部203控制为,如果在车辆1的行驶过程中运行碰撞减轻制动,则在车辆1的显示装置92及照明装置8(例如,刹车灯8d)上显示碰撞减轻制动正在运行。
[0078]
进一步,显示控制部203控制为,如果在执行驾驶辅助练习处理的过程中运行碰撞减轻制动,则在显示装置92上显示碰撞减轻制动正在运行,但不在照明装置8(例如,刹车灯8d)上进行显示。
[0079]
另外,驾驶辅助练习控制部202将与驾驶辅助练习处理有关的数据,记录在配置在车辆1内的便携通信装置100的存储部102中。便携通信装置100使用用于驾驶辅助的应用程序,来与驾驶辅助装置11进行通信,并藉此,执行驾驶辅助练习处理。
[0080]
用于驾驶辅助的应用程序伴随车辆1的停车状态的解除,而限制驾驶辅助练习处理。例如,如果车辆1的停车状态被解除,而车辆1起步,则用于驾驶辅助的应用程序结束驾驶辅助练习处理、或停止驾驶辅助练习处理。
[0081]
图3及图4是绘示驾驶辅助练习处理的具体例的图。
[0082]
如图3所示,在驾驶辅助练习模式中,显示控制部203使显示装置93显示画面a1及画面a2。画面a1显示正在道路上行驶的虚拟的本车辆b1及虚拟的另一车辆b2。画面a2显示针对驾驶员的消息等。
[0083]
另外,如图4所示,显示控制部203在显示装置93上进行用于驾驶辅助的显示,并且由语音输出装置91输出语音。
[0084]
具体而言,在图4的上段,画面a1显示虚拟的本车辆b1,而画面a2显示提醒操作set
按钮(车距控制(acc)执行按钮)的消息。进一步,语音输出装置91藉由语音提醒驾驶员操作set按钮。
[0085]
而且,如果操作set按钮,则在图4的下段,画面a1显示虚拟的本车辆b1正在执行车距控制(acc),而画面a2显示执行车距控制(acc)时的消息。进一步,语音输出装置91藉由语音通知正在执行车距控制(acc)。
[0086]
另外,在上述的例子中,执行了车距控制(acc),但例如如上所述,在驾驶辅助练习处理中,驾驶辅助练习控制部202可以练习在朝向虚拟的另一车辆b2行驶的虚拟的本车辆b1中执行碰撞减轻制动。在驾驶辅助练习处理中,显示装置93显示画面,而语音输出装置91输出语音,藉此,驾驶员可以进行用于驾驶辅助的练习。
[0087]
图5是绘示本实施方式的驾驶辅助装置11的处理的流程图。
[0088]
在步骤s1中,车辆1的驾驶员使用设置在车辆1内的规定操作件(例如,自动驾驶执行按钮)进行规定操作。
[0089]
在步骤s2中,驾驶辅助练习控制部202判断车辆1是否启动(例如,点火电源打开后)且处于停车状态下。如果车辆1启动且处于停车状态下(是),则处理移至步骤s3。另一方面,如果车辆1没有启动,及/或没有处于停车状态下(否),则处理移至步骤s5。
[0090]
在步骤s3中,驾驶辅助练习控制部202不执行自动驾驶,而是转至用于执行驾驶辅助练习处理的驾驶辅助练习模式。
[0091]
在步骤s4中,显示控制部203控制为,在执行驾驶辅助练习处理的过程中,使显示装置92进行显示,但不使照明装置8向外部进行显示。
[0092]
在步骤s5中,驾驶辅助执行部201执行车辆1的驾驶辅助。
[0093]
在步骤s6中,控制为,使显示装置92进行显示,并且使照明装置8向外部进行显示。
[0094]
在步骤s7中,驾驶辅助练习控制部202判断车辆1的停车状态是否被解除。如果停车状态被解除(是),则处理移至步骤s8。另一方面,如果停车状态没有被解除(否),则处理重复步骤s7。
[0095]
在步骤s8中,如果车辆1的停车状态被解除,而车辆1起步,则驾驶辅助练习控制部202结束驾驶辅助练习处理或停止驾驶辅助练习处理。
[0096]
根据本实施方式,例如,起到以下的效果。
[0097]
一种驾驶辅助装置11,搭载在车辆1上,可以执行用于控制车辆1的转向及/或制动的驾驶辅助,并且所述驾驶辅助装置11具备:驾驶辅助执行部201,如果车辆1的驾驶员使用设置在车辆1内的规定操作件进行规定操作,则执行驾驶辅助;及,驾驶辅助练习控制部202,执行让车辆1的驾驶员练习规定操作所需的驾驶辅助练习处理;其中,驾驶辅助练习控制部202在车辆1启动后且在停车状态下执行驾驶辅助练习处理。
[0098]
这样一来,驾驶辅助装置11藉由在车辆1启动后且在停车状态下执行驾驶辅助练习处理,可以使用实际的车辆1以模拟行驶过程中的状态来练习驾驶辅助。特别地,由于驾驶辅助是仅可以在车辆1行驶过程中执行的功能,因此,驾驶辅助装置11对驾驶员提供充分的练习,可以高效地进行用于驾驶辅助的练习。另外,驾驶员藉由执行驾驶辅助练习处理,可以在实际的行驶过程中从容地执行驾驶辅助。
[0099]
另外,规定操作件包括例如制动踏板7b、方向盘31、配置在方向盘31上的自动驾驶执行按钮或方向指示灯8a。由此,驾驶辅助装置11藉由规定操作件的操作,可以执行驾驶辅
助及驾驶辅助练习处理。
[0100]
另外,车辆1具备在车辆1的外部进行显示的照明装置8,驾驶辅助装置11还具备显示控制部203,所述显示控制部203控制为,当在车辆1的行驶过程中进行操作件的任意一种操作时、或在执行驾驶辅助的过程中,使照明装置8向外部进行显示,并且控制为,在执行驾驶辅助练习处理的过程中,不使照明装置8向外部进行显示。
[0101]
由此,驾驶辅助装置11在车辆1的行驶过程中或在执行驾驶辅助的过程中,可以对外部告知在车辆1的行驶过程中或在执行驾驶辅助的过程中。进一步,驾驶辅助装置11控制为,在执行驾驶辅助练习处理的过程中不向外部进行显示,藉此,可以进行驾驶辅助的练习,而不必向另一车辆等进行不必要的警报。
[0102]
另外,在驾驶辅助练习处理中,驾驶辅助练习控制部202可以练习在朝向虚拟对象行驶的车辆1中执行碰撞减轻制动,而显示控制部203控制为,如果在车辆1的行驶过程中运行碰撞减轻制动,则在车辆1的显示装置92及照明装置8上显示碰撞减轻制动正在运行。进一步,显示控制部203控制为,如果在执行驾驶辅助练习处理的过程中运行碰撞减轻制动,则在显示装置92上显示碰撞减轻制动正在运行,但不在照明装置8上进行显示。
[0103]
由此,当在行驶过程中运行碰撞减轻制动时,驾驶辅助装置11可以向外部告知已经运行碰撞减轻制动。另外,当在执行驾驶辅助练习处理的过程中运行碰撞减轻制动时,驾驶辅助装置11不向外部进行显示,藉此,可以进行驾驶辅助的练习,而不必向另一车辆等进行不必要的警报。
[0104]
另外,驾驶辅助练习控制部202将与驾驶辅助练习处理有关的数据,记录在配置在车辆1内的便携通信装置100上,便携通信装置100藉由与驾驶辅助装置11进行通信来执行驾驶辅助练习处理,便携通信装置100伴随车辆1的停车状态的解除,而限制驾驶辅助练习处理。
[0105]
由此,驾驶辅助装置11可以由便携通信装置100输出与驾驶辅助练习处理有关的显示及语音、以及与驾驶辅助练习处理有关的数据。进一步,驾驶辅助装置11伴随车辆1的停车状态被解除,而限制驾驶辅助练习处理,藉此,可以稳定地执行驾驶辅助练习处理的结束或停止。
[0106]
以上,对本发明的实施方式进行了说明,上述的驾驶辅助装置11可以藉由硬件、软件或它们的组合实现。另外,由上述的驾驶辅助装置11进行的控制方法也可以藉由硬件、软件或它们的组合实现。此处,由软件实现是指由计算机读取并执行程序来实现。
[0107]
可以使用各种类型的非暂时计算机可读介质(non-transitory computer readable medium)来存储程序,并提供给计算机。非暂时计算机可读介质包括各种类型的有形记录介质(tangible storage medium)。非暂时计算机可读介质的示例包括磁记录介质(例如,硬盘驱动器)、光磁记录介质(例如,磁光盘)、cd-rom(read only memory)、cd-r、cd-r/w、半导体存储器(例如,掩膜rom、prom(programmable rom)、eprom(erasable prom)、闪存rom、ram(random access memory))。
[0108]
以上,对本发明的一实施方式进行了说明,但本发明并不限定于此。可以在本发明的主旨范围内对细节的构造进行适当变更。
[0109]
附图标记
[0110]
1:车辆
[0111]
2:控制装置
[0112]
11:驾驶辅助装置
[0113]
201:驾驶辅助执行部
[0114]
202:驾驶辅助练习控制部
[0115]
203:显示控制部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1