自卸车防翻车系统及方法与流程
1.本发明涉及车辆技术领域,尤其涉及一种自卸车防翻车系统及方法。
背景技术:
2.随着汽车持有量的增加,人们越来越重视汽车的安全性能。车辆在行驶或运输过程中,由于转弯时速度过快、急打转向、装载货物偏载等原因,可能导致车辆侧翻,日常生活中这种事故是时有发生的,一旦发生车辆侧翻,对人们的生命及财产都会造成严重威胁。
3.自卸车作为专用道工程用车,在工程中扮演重要角色,但由于起结构特殊,车斗在举升的时候由于存在重心抬高并偏移的可能性,往往更容易会产生翻车的风险,给社会造成了巨大损失。
4.自卸车在非平整路面上行驶并举升时,容易翻车。现有技术中主要是依靠驾驶员的经验,可以一定程度降低事故发生概率,但这种依靠驾驶员的主观经验来规避风险的措施不确定性较高。
技术实现要素:
5.本发明提供一种自卸车防翻车系统及方法,用以解决现有技术中自卸车在非平整路面上举升容易造成翻车的问题。
6.本发明提供一种自卸车防翻车系统,包括:角度传感器、数据分析模块以及控制模块;
7.所述角度传感器设于自卸车,用于获取第一角度α和与所述第一角度α相对应的第二角度β,并发送至所述数据分析模块;
8.所述数据分析模块用于将第一角度α输入到报警参数模型中获取输出信息,所述输出信息包括与所述第一角度α相对应的报警阈值;比较所述第二角度β和所述报警阈值的大小,以获取比较结果;
9.基于所述比较结果,在所述控制模块的控制下,所述自卸车发出报警信息或者调整所述自卸车的工作参数。
10.根据本发明提供的一种自卸车防翻车系统,在所述输出信息包括与所述第一角度α相对应的所述第一报警阈值和所述第二报警阈值的情况下,所述比较结果为所述第二角度β大于所述第一报警阈值小于所述第二报警阈值,或者所述第二角度β大于所述第二报警阈值。
11.根据本发明提供的一种自卸车防翻车系统,在所述第二角度β大于所述第一报警阈值小于所述第二报警阈值的情况下,所述控制模块控制所述自卸车发出报警信息;
12.在所述第二角度β大于所述第二报警阈值的情况下,所述控制模块调整所述自卸车的工作参数。
13.根据本发明提供的一种自卸车防翻车系统,所述控制模块调整所述自卸车的工作参数包括降低所述自卸车的车速或降低所述自卸车的悬架高度中的至少一者。
14.根据本发明提供的一种自卸车防翻车系统,在所述自卸车以所述第二角度β运行超过第一预设时长的情况下,所述控制模块控制所述自卸车发出报警信息,其中,所述第二角度β大于所述第一报警阈值小于所述第二报警阈值;
15.在所述自卸车以所述第二角度β运行超过第二预设时长的情况下,所述控制模块调整所述自卸车的工作参数,其中,所述第二角度β大于所述第二报警阈值。
16.根据本发明提供的一种自卸车防翻车系统,所述控制模块调整所述自卸车的工作参数包括降低所述自卸车的车速或降低所述自卸车的悬架高度中的至少一者。
17.根据本发明提供的一种自卸车防翻车系统,所述第一角度α为向量b沿顺时针方向与向量s之间的夹角,所述向量b为车身底盘平面a上车头方向的向量,所述向量s为车身底盘平面a上垂直于直线l的一条向量,所述直线l为车身底盘平面a与水平面w的相交线,所述第二角度β为车身底盘平面a与水平面w之间的夹角。
18.根据本发明提供的一种自卸车防翻车系统,所述报警参数模型使用多组训练数据训练而成,所述多组中的训练数据中的每一组训练数据均包括第一角度α和对所述第一角度α进行标识的报警阈值。
19.根据本发明提供的一种自卸车防翻车系统,所述角度传感器包括陀螺仪。
20.本发明还提供一种自卸车防翻车方法,包括:
21.获取第一角度α和与所述第一角度α相对应的第二角度β;
22.将所述第一角度α输入到报警参数模型中获取输出信息,所述输出信息包括与所述第一角度α相对应的报警阈值,比较所述第二角度β和所述报警阈值的大小,以获取比较结果;
23.基于所述比较结果,自卸车发出报警信息或者调整自卸车的工作参数。
24.根据本发明提供的一种自卸车防翻车方法,在所述输出信息包括与所述第一角度α相对应的第一报警阈值和第二报警阈值的情况下,所述比较所述第二角度β和所述报警阈值的大小,以获取比较结果,包括:
25.所述第二角度β大于所述第一报警阈值小于所述第二报警阈值,或者所述第二角度β大于所述第二报警阈值。
26.根据本发明提供的一种自卸车防翻车方法,所述基于所述比较结果,自卸车发出报警信息或者调整自卸车的工作参数,包括:
27.所述第二角度β大于所述第一报警阈值小于所述第二报警阈值的情况下,所述自卸车发出报警信息;
28.在所述第二角度β大于所述第二报警阈值的情况下,调整所述自卸车的工作参数。
29.根据本发明提供的一种自卸车防翻车方法,所述调整所述自卸车的工作参数,包括:
30.降低所述自卸车的车速或降低所述自卸车的悬架高度中的至少一者。
31.根据本发明提供的一种自卸车防翻车方法,所述基于所述比较结果,自卸车发出报警信息或者调整自卸车的工作参数,包括:
32.在所述自卸车以所述第二角度β运行超过第一预设时长的情况下,所述自卸车发出报警信息,其中,所述第二角度β大于所述第一报警阈值小于所述第二报警阈值;
33.在所述自卸车以所述第二角度β运行超过第二预设时长的情况下,调整所述自卸
车的工作参数,其中,所述第二角度β大于所述第二报警阈值。
34.根据本发明提供的一种自卸车防翻车方法,所述调整所述自卸车的工作参数,包括:
35.降低所述自卸车的车速或降低所述自卸车的悬架高度中的至少一者。
36.本发明提供的自卸车防翻车系统及方法,通过角度传感器获取的第一角度α作为输入值,输入至报警参数模型中,获得的输出值为与第一角度α相对应的报警阈值,比较报警阈值和通过角度传感器获取的第二角度β大小,数据分析模块基于报警阈值和第二角度β的比较结果生成相应的操作指令,并发送至控制模块,在控制模块的控制下,自卸车发出报警信息或者调整自卸车的工作参数。本发明的自卸车防翻车系统,通过角度传感器来测试整车的第一角度α和第二角度β,并通过第一角度α和第二角度β来综合判断在当前路面上举升的风险,最终实现在风险发生之前提出报警或者采取主动措施从而保护人和车的安全。
附图说明
37.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
38.图1是本发明提供的自卸车防翻车系统的结构框图;
39.图2是本发明提供的自卸车的运行情况示意图之一;
40.图3是本发明提供的自卸车的运行情况示意图之二;
41.图4是本发明提供的第一角度α和第二角度β的示意图;
42.图5是本发明提供的报警参数曲线图;
43.图6是本发明提供的自卸车防翻车方法的流程图;
44.附图标记:
45.1:器件箱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:陀螺仪;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3:数据分析模块;
46.4:控制模块;
ꢀꢀꢀꢀꢀꢀꢀ
5:警示灯;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6:声音警示器。
具体实施方式
47.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.如图4所示,第一角度α为向量b沿顺时针方向与向量s之间的夹角,向量b为车身底盘平面a上车头方向的向量,向量s为车身底盘平面a上垂直于直线l的一条向量,直线l为车身底盘平面a与水平面w的相交线;第二角度β为车身底盘平面a与水平面w之间的夹角。
49.现有技术中一般通过陀螺仪测得的第二角度β判定整车的倾斜程度,设定一个倾斜角度阈值x,通过对陀螺仪实测第二角度β和阈值x的对比来评估翻车风险程度,对驾驶员形成预警。
50.但是这个单参数的判断策略存在较大的局限性,翻车的风险不但和第二角度β有
关,也和第一角度α有关。
51.如图2和图3所示,在相同的第二角度β的情况下,也就是说第二角度β为45
°
的时候,自卸车倾斜方向朝向车头,整车可能不会朝前翻车;但是自卸车倾斜朝着车两侧,整车可能会发生侧翻。
52.由上述可知,自卸车的翻车风险不但和第二角度β相关,也和第一角度α有关,第一角度α和第二角度β这二个参数共同决定了自卸车翻车的概率。
53.为了解决上述问题,下面结合图1和图5描述本发明的自卸车防翻车系统。
54.如图1所示,本发明实施例的自卸车防翻车系统,包括:角度传感器、数据分析模块3以及控制模块4。其中,角度传感器可以为陀螺仪2,陀螺仪2设于自卸车。
55.陀螺仪2在颠簸和加速度情况下,可能出现和真实情况下测量数据不相符的情况。为了防止出现测量误差,陀螺仪2须具有一定程度的防抖功能。
56.为了便于安装上述零部件,将陀螺仪2、数据分析模块3以及控制模块4设于一个器件箱1的内部,再根据实际情况将该器件箱1设于自卸车的相应位置处。
57.陀螺仪2用于获取第一角度α和与第一角度α相对应的第二角度β,也就是说,在自卸车的同一状态、同一时间点同时获取第一角度α和第二角度β。陀螺仪2获取的第一角度α和第二角度β发送至数据分析模块3。
58.数据分析模块3用于将第一角度α输入到报警参数模型中,其中,报警参数模型使用多组训练数据训练而成,多组中的训练数据中的每一组训练数据均包括:第一角度α和对第一角度α进行标识的报警阈值;获取报警参数模型的输出信息,其中,输出信息包括与第一角度α相对应的报警阈值;比较第二角度β与报警阈值的大小,以获取比较结果,并发送至控制模块4;
59.基于比较结果,在控制模块4的控制下,自卸车发出报警信息或者调整自卸车的工作参数。其中,调整自卸车工作参数包括调整自卸车的车速或调整自卸车的悬架高度中的至少一者。
60.例如,降低车速,或者降低悬架高度,或者同时降低车速和悬架高度。
61.在可选的实施例中,卸车防翻车系统还包括警示灯5,或者卸车防翻车系统还包括声音警示器6,或者卸车防翻车系统还包括警示灯5和声音警示器6,警示灯5和声音警示器6与控制模块4通信连接。其中,警示灯5和声音警示器6可以单独使用或者同时使用。
62.可以理解的是,由于整车是长方形的,当车辆倾斜的第一角度α不同时候,能承受的最大第二角度β是不同的。一般而言,侧倾(第一角度α=90
°
或270
°
)状态下能允许的第二角度β较小。
63.设定的报警阈值βx不是固定值,而是和第一角度α是有关联的一组数据或者曲线。
64.在本发明实施例中,通过角度传感器获取的第一角度α作为输入值,输入至报警参数模型中,获得的输出值为与第一角度α相对应的报警阈值,比较报警阈值和通过角度传感器获取的第二角度β大小,数据分析模块3基于报警阈值和第二角度β的比较结果生成相应的操作指令,并发送至控制模块4,在控制模块4的控制下,自卸车发出报警信息或者调整自卸车的工作参数。
65.本发明实施例的自卸车防翻车系统,通过角度传感器来测试整车的第一角度α和第二角度β,并通过第一角度α和第二角度β来综合判断在当前路面上举升的风险,最终实现
在风险发生之前提出报警或者采取主动措施从而保护人和车的安全。
66.在可选的实施例中,在输出信息包括与第一角度α相对应的第一报警阈值和第二报警阈值的情况下,比较结果为第二角度β大于第一报警阈值小于第二报警阈值,或者第二角度β大于第二报警阈值。其中,第一报警阈值小于第二报警阈值。
67.需要说明的是,考虑到更合理的策略,报警等级分为2级,当整车倾斜情况超过第一报警阈值β1时候,系统判定存在一定风险,开始声光报警提醒驾驶员注意整车状态。
68.当整车倾斜情况超过第二报警阈值β2的时候,系统判定具备高风险,会更急促地报警同时,调整自卸车的工作参数,防止人员误操作造成风险。
69.具体地,在第二角度β大于所述第一报警阈值且小于第二报警阈值的情况下,在控制模块的控制下,自卸车发出报警信息,警示灯5和声音警示器6启动;在第二角度β大于第二报警阈值的情况下,在控制模块的控制下,降低车速,或者降低悬架高度,或者同时降低车速和悬架高度。
70.对于超限第一报警阈值β1和第二报警阈值β2的时间长短也需要作为策略考虑到报警策略。例如在野外颠簸的乱石路上,传感器会有“第一角度α和第二角度β短时间内剧烈变化”的现象,此时系统会根据此现象将路况识别为颠簸路况。
71.在此路况下可能由于颠簸的加速度导致非常短暂的超过报警值(并非真实超限),当超限时间短于预设时长的时候,可以不报警。避免频繁误触发。
72.为此,在可选的实施例中,在自卸车以第二角度β运行超过第一预设时长的情况下,控制模块控制自卸车发出报警信息,其中,第二角度β大于第一报警阈值小于第二报警阈值;
73.在自卸车以第二角度β运行超过第二预设时长的情况下,控制模块调整自卸车的工作参数,其中,第二角度β大于第二报警阈值。
74.例如,在自卸车以第二角度β运行超过1分钟的情况下,警示灯5和声音警示器6发出声光警示,此时第二角度β大于第一报警阈值小于第二报警阈值;
75.在自卸车以第二角度β运行超过30秒钟的情况下,警示灯5和声音警示器6发出声光警示,并且降低车速,或者降低悬架高度,或者同时降低车速和悬架高度,此时第二角度β大于第二报警阈值。
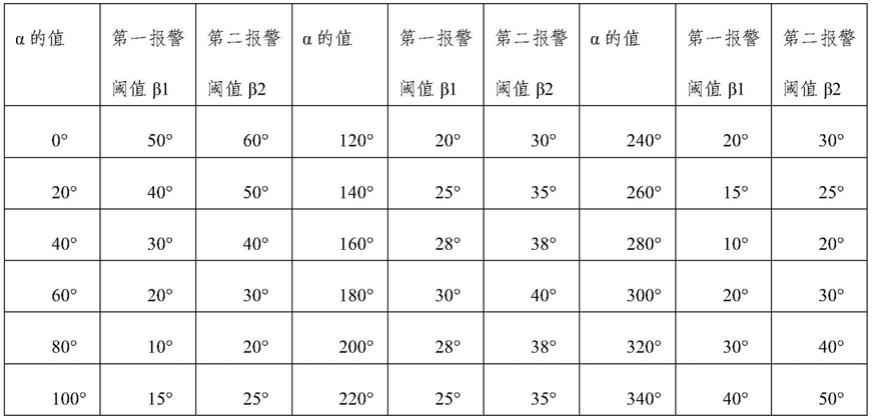
76.需要说明的是,关于报警阈值βx此时需要在不同工况和负载情况下,通过仿真和实验来测量βx值。
77.对第一角度α可按照每20
°
取样进行分析和仿真,并将数据填写在表1中。
78.表1第一角度α与报警阈值βx的关联关系表
[0079][0080]
如图5所示,将表1中的参数转化为坐标后拟合报警参数曲线,最终将包含报警参数曲线的报警参数模型集成至数据分析模块3,根据第一角度α获得与第一角度α相对应的第一报警阈值和第二报警阈值,以便最终做出决策。
[0081]
需要说明的是,不同的车型,由于大小尺寸,重量分布不同,以及载荷的不同,第一报警阈值β1和第二报警阈值β2是不同的,需要通过实验和仿真分析进行标定。
[0082]
另一方面,如图6所示,本发明实施例的自卸车防翻车方法,包括:
[0083]
s100,获取第一角度α和与第一角度α相对应的第二角度β;
[0084]
陀螺仪2可以用于获取第一角度α和与第一角度α相对应的第二角度β,也就是说,陀螺仪2在自卸车的同一状态、同一时间点同时获取第一角度α和第二角度β。
[0085]
s200,将第一角度α输入到报警参数模型中获取输出信息,输出信息包括与第一角度α相对应的报警阈值,比较第二角度β和报警阈值的大小,以获取比较结果;
[0086]
陀螺仪2把获取的第一角度α和第二角度β发送至数据分析模块3。数据分析模块3用于将第一角度α输入到报警参数模型中,其中,报警参数模型使用多组训练数据训练而成,多组中的训练数据中的每一组训练数据均包括:第一角度α和对第一角度α进行标识的报警阈值;获取报警参数模型的输出信息,其中,输出信息包括与第一角度α相对应的报警阈值;比较第二角度β与报警阈值的大小,以获取比较结果,并发送至控制模块4。
[0087]
s300,基于比较结果,自卸车发出报警信息或者调整自卸车的工作参数。
[0088]
基于比较结果,在控制模块4的控制下,自卸车发出报警信息或者调整自卸车的工作参数。其中,调整自卸车工作参数包括调整自卸车的车速或调整自卸车的悬架高度中的至少一者。例如,降低车速,或者降低悬架高度,或者同时降低车速和悬架高度。
[0089]
本发明实施例的自卸车防翻车方法,获取整车的第一角度α和第二角度β,通过第一角度α、第二角度β以及报警阈值来综合判断在当前路面上举升的风险,最终实现在风险发生之前提出报警或者采取主动措施从而保护人和车的安全。
[0090]
在可选的实施例中,在输出信息包括与第一角度α相对应的第一报警阈值和第二报警阈值的情况下,比较第二角度β和报警阈值的大小,以获取比较结果,包括:
[0091]
第二角度β大于第一报警阈值小于第二报警阈值,或者第二角度β大于第二报警阈值。
[0092]
需要说明的是,考虑到更合理的策略,报警等级分为2级,当整车倾斜情况超过第一报警阈值β1时候,判定存在一定风险,开始声光报警提醒驾驶员注意整车状态。
[0093]
当整车倾斜情况超过第二报警阈值β2的时候,判定具备高风险,会在更急促地报警的同时,调整自卸车的工作参数,防止人员误操作造成风险。
[0094]
具体地,在第二角度β大于第一报警阈值且小于第二报警阈值的情况下,在控制模块的控制下,自卸车发出报警信息,警示灯5和声音警示器6启动;在第二角度β大于第二报警阈值的情况下,在控制模块的控制下,降低车速,或者降低悬架高度,或者同时降低车速和悬架高度。
[0095]
其中,对于超限第一报警阈值β1和第二报警阈值β2的时间长短也需要作为策略考虑到报警策略。例如,在野外颠簸的乱石路上,传感器会有“第一角度α和第二角度β短时间内剧烈变化”的现象,此时系统会根据此现象将路况识别为颠簸路况。
[0096]
在此路况下可能由于颠簸的加速度导致非常短暂的超过报警值(并非真实超限),当超限时间短于预设时长的时候,可以不报警。避免频繁误触发。
[0097]
为此,在可选的实施例中,在自卸车以第二角度β运行超过第一预设时长的情况下,控制模块控制自卸车发出报警信息,其中,第二角度β大于第一报警阈值小于第二报警阈值;
[0098]
在自卸车以第二角度β运行超过第二预设时长的情况下,控制模块调整自卸车的工作参数,其中,第二角度β大于第二报警阈值。
[0099]
例如,在自卸车以第二角度β运行超过1分钟的情况下,警示灯5和声音警示器6发出声光警示,此时第二角度β大于第一报警阈值小于第二报警阈值;
[0100]
在自卸车以第二角度β运行超过30秒钟的情况下,警示灯5和声音警示器6发出声光警示,并且降低车速,或者降低悬架高度,或者同时降低车速和悬架高度,此时第二角度β大于第二报警阈值。
[0101]
本发明实施例的自卸车防翻车方法,采用第一角度α和第二角度β的双参数方案,更贴近实际,更精确。
[0102]
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
[0103]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1