驾驶辅助装置的制作方法
1.本发明涉及驾驶辅助装置。所述驾驶辅助装置例如被使用于在车辆与目标物发生碰撞的可能性高的情况下通过制动力使车辆减速来避免所述碰撞的用途。
背景技术:
2.公开了一种驾驶辅助装置,其为了避免存在于车辆的预想行驶区域内的物体(例如停在自身车道内的其他车辆)与车辆的碰撞,自动地产生制动力来使车辆减速(例如参照日本特开2017-114427)。以下,对于搭载了这样的驾驶辅助装置的车辆,为了与其他车辆进行区别,方便起见,有时也称为“本车辆”。进一步,本车辆的预想行驶区域也称为“本车辆通过区域”。
3.更详细而言,上述驾驶辅助装置选择性地执行通过强制动力使本车辆减速的高g制动控制(g为相当于重力的力)和通过比较弱的制动力使本车辆减速的低g制动控制。上述驾驶辅助装置在存在于本车辆通过区域内的目标物与本车辆的重叠率比较小的情况下,先执行低g制动控制。在执行该低g制动控制的期间驾驶员不进行转弯操作(转向操作),其结果是继续进行低g制动控制的话无法避免与目标物的碰撞的可能性变高了时,上述驾驶辅助装置执行高g制动控制。
4.因此,上述驾驶辅助装置能够降低在驾驶员意图要通过转弯操作来避免碰撞的情况下执行高g制动控制的可能性,因此,能够降低不必要的高g制动给驾驶员带来强烈不快感的可能性。
技术实现要素:
5.然而,在正在接近本车辆通过区域的目标物(例如正要在本车辆的前方横穿的其他车辆)与本车辆碰撞的可能性高的情况下,也希望驾驶辅助装置对本车辆赋予制动力以避免该碰撞。此外,以下将正在以与本车辆通过区域交叉的方式接近的目标物称为“候选目标物”。
6.另一方面,有时作为候选目标物的其他车辆为了避免与本车辆的碰撞而进行制动,由此,其他车辆会在到达本车辆通过区域之前停止。在该情况下,存在如下的可能性:尽管未发生碰撞,但当驾驶辅助装置通过强制动力使本车辆急减速时,本车辆的驾驶员会感到强烈的违和感。尽管实际上未发生碰撞、但使用了为了避免碰撞而使得产生的强制动力的制动在以下也被称为“不必要强制动”。
7.本发明提供能够避免本车辆与候选目标物的碰撞、并且能够降低产生对于候选目标物的不必要强制动的可能性的驾驶辅助装置。
8.本发明的第1技术方案为驾驶辅助装置。所述驾驶辅助装置包括:目标物检测装置,其构成为检测以与预想为车辆要行驶的本车辆通过区域交叉的方式逐渐接近所述本车辆通过区域的目标物;制动装置,其构成为使所述车辆产生制动力;以及控制器,其构成为对所述制动装置进行控制。所述控制器构成为在预想为所述车辆维持当前时间点的车辆速
度、所述目标物维持当前时间点的目标物速度、且所述车辆与所述目标物在交叉区域中发生碰撞时,将所述目标物确定为横穿目标物,所述交叉区域是预想为所述目标物要通过的目标物通过区域与所述本车辆通过区域重叠的区域,所述控制器构成为对所述制动装置进行控制,以使得所述车辆从预想碰撞时间点之前的第1时间点开始以第1减速度进行减速,所述预想碰撞时间点是预想为所述车辆与所述横穿目标物发生碰撞的时间点。所述控制器构成为在即将第3时间点之前的第2时间点依然存在所述横穿目标物时,对所述制动装置进行控制以使得所述车辆从所述第2时间点开始以第2减速度进行减速。所述第3时间点是所述第1时间点之后的、所述车辆被使得以所述第1减速度进行减速的时间点,并且是在所述车辆从所述第3时间点以具有比所述第1减速度的绝对值大的绝对值的第2减速度开始减速的情况下所述车辆无法在即将进入所述交叉区域之前的位置停止的时间点。
9.在所述第1技术方案中,在候选目标物被确定为了横穿目标物时,车辆从预想碰撞时间点之前的第1时间点开始被使得比较平稳地进行减速。然后,在第2时间点到来之前、候选目标物不减速、该候选目标物在第2时间点也依然被确定为是横穿目标物的情况下,车辆从第2时间点开始被使得进行急减速,以使得在即将到达交叉区域之前的位置停止。由此,即使是在被确定为是横穿目标物的目标物不减速的情况下,也能避免车辆与横穿目标物的碰撞。与此相对,在第1时间点~第2时间点的期间,被确定为了是横穿目标物的目标物开始减速,其结果,在第2时间点预想为“该目标物未进入交叉区域”的情况下(即,在该目标物已经不被确定为是横穿目标物的情况下),车辆不进行急减速。
10.由此,在被确定为是横穿目标物的目标物进行减速而不进入交叉区域的情况下(即,在不发生碰撞的情况下),不发生车辆急减速的情形。由此,根据上述第1技术方案,能够降低发生不必要强制动的可能性,因此,能够降低给驾驶员带来强烈违和感的可能性。
11.在所述第1技术方案中,所述控制器也可以构成为取得即将第4时间点之前的目标物制动必要时间点来作为所述第2时间点。所述第4时间点也可以是所述横穿目标物以预定的设想目标物减速度开始减速的时间点。所述第4时间点也可以是在所述横穿目标物以所述设想目标物减速度持续进行减速的情况下所述横穿目标物无法在即将进入所述交叉区域之前的位置停止的时间点。
12.在上述构成中,即使横穿目标物以设想目标物减速度开始减速、也无法在即将进入交叉区域之前停止的盖然性高的时间点被作为第2时间点来使用。由此,根据上述构成,能够有效地降低发生不必要强制动的可能性,并且,能够避免横穿目标物与车辆的碰撞。
13.在所述第1技术方案中,所述控制器也可以构成为在预测为所述目标物制动必要时间点在高g制动开始时间点之前到来时,对所述制动装置进行控制以使得不从所述第1时间点开始使所述车辆以所述第1减速度进行减速,而从所述高g制动开始时间点开始使所述车辆以所述第2减速度进行减速。所述高g制动开始时间点也可以是即将第5时间点之前的时间点,所述第5时间点是所述车辆以所述第2减速度开始减速的时间点。所述第5时间点也可以是在所述车辆以所述第2减速度持续进行减速的情况下所述车辆无法在即将进入所述交叉区域之前的位置停止的时间点。
14.若目标物制动必要时间点为高g制动开始时间点之前的时间点,则在高g控制开始时间点能够判定为“横穿目标物进入交叉区域的可能性极大”。因此,在上述构成的情况下,即使从高g制动开始时间点开始了使车辆以第2减速度进行减速,该制动也不会成为不必要
强制动。
15.在所述第1技术方案中,所述控制器也可以构成为取得所述横穿目标物的类别,也可以构成为根据所述取得的类别,对所述设想目标物减速度进行变更。
16.横穿目标物的类别例如也可以是其他车辆以及其他车辆以外的目标物。其他车辆也可以还包括普通乘用车、大型车辆以及自动二轮车等,其他车辆以外的目标物也可以还包括行人。根据上述构成,能够将设想目标物减速度设定为与横穿目标物的类别相应的适当的减速度。设想目标物减速度例如为避免横穿目标物与其他车辆(在该情况下为搭载有本公开装置的本车辆)碰撞时的所述横穿目标物的典型的减速度。由此,根据上述构成,能够高精度地确定目标物制动必要时间点。
17.在所述第1技术方案中,所述控制器也可以构成为取得所述横穿目标物的类别,也可以构成为在所述取得的类别为行人的情况下,取得所述行人与所述本车辆通过区域的距离变得比预定的距离阈值小的时间点来作为所述第2时间点。
18.一般而言,与车辆相比,行人的从开始减速到停止为止的时间非常短。换言之,行人的设想目标物减速度难以设定为某值,不如被认为是无限大。
19.另一方面,注意到车辆接近的行人一般会停止在从车辆的本车辆通过区域离开了预定的余裕距离的位置。于是,上述距离阈值也可以被设定为基于上述余裕距离的距离。在该情况下,若行人与本车辆通过区域的距离比距离阈值短,则行人未注意本车辆接近的可能性高。于是,在上述构成中,使用行人与本车辆通过区域的距离成为比距离阈值小的时间点来作为第2时间点。由此,能够避免与接近本车辆通过区域而走来的行人的碰撞,并且,能够降低针对接近本车辆通过区域而走来的行人而发生不必要强制动的可能性。
附图说明
20.下文将参照附图说明本发明示例性实施例的特征、优点以及技术和产业的意义,其中相同的标号表示同样的要素,并且,其中:
21.图1是搭载有本发明的实施方式涉及的驾驶辅助装置(本辅助装置)的车辆的概略图。
22.图2是本辅助装置的框图。
23.图3是表示成为第1制动控制的对象的通过区域内目标物的例子的图。
24.图4是表示执行第1制动控制的情况下的本车辆的行驶速度(车速)、本车辆的减速度以及目标物纵向距离的变化的时间图。
25.图5是表示车速与制动开始时间的关系的曲线图。
26.图6是表示成为第2制动控制的对象的横穿目标物的例子的图。
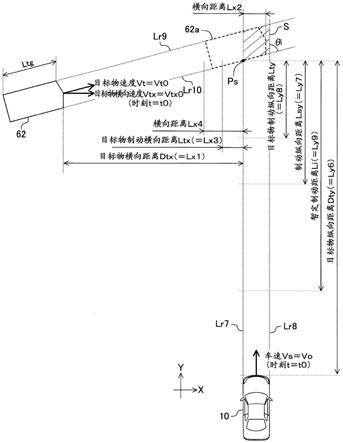
27.图7是表示对于图6的横穿目标物执行第2制动控制的情况下的车速、目标物横向速度、目标物纵向距离以及目标物横向距离的变化的时间图。
28.图8是表示成为第2制动控制的对象的横穿目标物的其他例子的图。
29.图9是表示对于图8的横穿目标物执行第2制动控制的情况下的车速、目标物横向速度、目标物纵向距离以及目标物横向距离的变化的时间图。
30.图10是表示本辅助装置执行的自动制动处理例程的流程图。
31.图11是表示本辅助装置执行的目标物制动纵向距离取得处理例程的流程图。
具体实施方式
32.(构成)
33.以下,参照附图对本发明的实施方式涉及的驾驶辅助装置(以下也称为“本辅助装置”。)进行说明。本辅助装置被应用于图1所示的本车辆10。如根据作为本辅助装置的框图的图2可理解的那样,本辅助装置包括分别为电子控制单元(ecu:electronic control unit)的“驾驶辅助ecu21、驱动控制ecu22、制动控制ecu23以及eps-ecu24”。
34.驾驶辅助ecu21包括具备cpu、非易失性存储器以及ram的微型计算机来作为主要素。cpu通过逐次执行预定的程序(例程)来进行数据的读入、数值运算以及运算结果的输出等。非易失性存储器由rom和能够重写的闪速存储器等构成,存储cpu执行的程序和执行程序时被进行参照的查找表(映射(map))等。ram暂时性地存储通过cpu参照的数据。
35.驱动控制ecu22、制动控制ecu23以及eps-ecu24分别与驾驶辅助ecu21同样地包括微型计算机来作为主要素。这些ecu能够经由can(controller area network,控制器局域网络)25相互进行数据通信(能够数据交换)。
36.而且,这些ecu能够经由can25从“其他ecu”接收与该其他ecu连接的传感器的输出值。例如,驱动控制ecu22、制动控制ecu23以及eps-ecu24分别能够经由can25从驾驶辅助ecu21接收通过与驾驶辅助ecu21连接的后述的车速传感器32检测到的车速vs。进一步,这些ecu中的全部或者几个也可以合并为一个ecu(控制单元)。
37.驾驶辅助ecu21在以下也简称为ecu21。ecu21与前方摄像头31、车速传感器32、显示器33以及扬声器34连接。
38.前方摄像头31配设在本车辆10的车室内上部的后视镜(未图示)附近的位置(参照图1。)。前方摄像头31每当经过预定的时间间隔δtc(固定值)时取得对处于本车辆10的前方的区域进行拍摄而得到的“前方图像”,向ecu21输出表示前方图像的信号。
39.车速传感器32对作为本车辆10的行驶速度的车速vs进行检测,向ecu21输出表示车速vs的信号。
40.显示器33是配设在本车辆10的车室内且能够由驾驶员视认的位置的液晶显示器(lcd)。显示于显示器33的文字和图形等由ecu21进行控制。
41.扬声器34配设在本车辆10的车室内。通过扬声器34再现的警告音和语音消息等由ecu21进行控制。
42.(驱动力的控制)
43.驱动控制ecu22通过对发动机41和变速器42进行控制,从而对本车辆10的驱动力进行调整。驱动控制ecu22与各种驱动控制传感器43连接,接收这些传感器的输出值。驱动控制传感器43是对发动机41的运转状态量(参数)和驱动控制涉及的驾驶员的操作进行检测的传感器。
44.驱动控制传感器43包括加速踏板的操作量(踏下量)传感器、对变速杆的操作状态进行检测的挡位传感器、节气门开度传感器、内燃机转速传感器以及吸入空气量传感器等。驱动控制ecu22基于车速vs和驱动控制传感器43的输出值等,决定(作为后述的驱动转矩fd的要求值的)要求驱动转矩frq。
45.进一步,驱动控制ecu22与包括节气门致动器和燃料喷射阀等的发动机致动器44连接,通过对这些致动器进行控制,从而对发动机41的产生转矩进行控制。驱动控制ecu22
对发动机致动器44和变速器42进行控制,以使得传递至本车辆10的驱动轮的驱动转矩fd与要求驱动转矩frq一致,由此对作为车速vs的每单位时间的变化量的加速度ac进行控制。
46.进一步,驱动控制ecu22当从ecu21接收到包括目标驱动转矩ftg的“驱动力控制要求”时,对发动机致动器44和变速器42进行控制以使得实际的驱动转矩fd与目标驱动转矩ftg一致。驱动控制ecu22当在接收到驱动力控制要求之后、没有从ecu21新接收驱动力控制要求的状态持续预定时间时,重新开始对加速度ac进行控制的处理以使得上述的驱动转矩fd与要求驱动转矩frq一致。
47.(制动力的控制)
48.制动控制ecu23对制动机构45进行控制,该制动机构45是搭载于本车辆10的油压式摩擦制动装置(制动机构)。制动控制ecu23与各种制动控制传感器46连接,接收这些传感器的输出值。制动控制传感器46是对为了控制制动机构45所使用的状态量和制动控制涉及的驾驶员的操作进行检测的传感器,包括制动器踏板的操作量传感器和作用于制动机构45的制动器油的压力传感器等。制动控制ecu23基于车速vs和制动控制传感器46的输出值等,决定(作为后述的制动力bf的要求值的)要求制动力brq。
49.而且,制动控制ecu23与作为制动机构45的油压控制致动器的各种制动致动器47连接。制动控制ecu23对制动致动器47进行控制以使得制动力bf与要求制动力brq一致,由此对加速度ac进行控制,该制动力bf是本车辆10具备的车轮分别产生的摩擦制动力的总量。此外,在该情况下,加速度ac为负值。因制动机构45的工作而车速vs减少的情况下的加速度ac的大小在以下也被称为减速度as。
50.进一步,制动控制ecu23当从ecu21接收到包括目标减速度atg的“制动力控制要求”时,使用制动致动器47来使得产生制动力bf以使得实际的减速度as与目标减速度atg一致。制动控制ecu23当在接收到制动力控制要求之后、没有从ecu21新接收制动力控制要求的状态持续预定时间时,重新开始对减速度as进行控制的处理以使得上述的制动力bf与要求制动力brq一致。此外,若基于目标减速度atg产生的制动力bf比要求制动力brq小,则制动控制ecu23对制动致动器47进行控制以使得实际的制动力bf与要求制动力brq一致。
51.(转向角度的控制)
52.eps-ecu24对与搭载于本车辆10的转向机构48连接的转向电动机49进行控制。转向机构48包括方向盘51(参照图1。),是根据作为方向盘51的旋转角度的转向角度使本车辆10的转向轮(即前轮)的转向角度θs变化的机构。
53.eps-ecu24与方向盘传感器52连接,接收方向盘传感器52的输出值。方向盘传感器52对方向盘51的转向角度和转向转矩进行检测,该转向转矩是在与方向盘51连结的转向轴所施加的转矩。
54.eps-ecu24基于车速vs、转向角度以及转向转矩等,决定(作为后述的辅助转矩fw的目标值的)目标辅助转矩fwt。而且,eps-ecu24对转向电动机49进行控制以使得转向电动机49所产生的“使转向轴旋转的辅助转矩fw”与目标辅助转矩fwt一致。
55.(自动制动控制)
56.对ecu21执行的检测前方图像所包含的立体目标物的处理、和为了避免与所检测的立体目标物的碰撞而ecu21所执行的“自动制动控制”进行说明。
57.在以下的说明中,使用将本车辆10的左右方向中心的前端部作为原点的x-y坐标
系(参照图1。)。在本车辆10的车宽方向上延伸的轴为x轴,在本车辆10的前后方向上延伸的轴为y轴。x轴和y轴相互正交。x坐标值在相对于本车辆10的行进方向的右方向上为正值,在相对于本车辆10的行进方向的左方向上为负值。y坐标值在本车辆10的前方向上为正值,在本车辆10的后方向上为负值。
58.ecu21基于从前方摄像头31接收到的前方图像(表示前方图像的信号),检测(提取)其他车辆和行人等的立体目标物。更具体地描述时,ecu21使用模板匹配(template matching)方法,从前方图像检测立体目标物。因此,ecu21将与其他车辆和行人等对应的各种“模板”预先存储于非易失性存储器。
59.若前方图像包含与所存储的模板之一类似的区域,则ecu21判定为在该区域包含有与该模板(对应模板)对应的立体目标物。即,在该情况下,ecu21从前方图像检测(提取)立体目标物。
60.ecu21当从前方图像检测到立体目标物时,取得与该立体目标物对应的模板(即对应模板)的类别来作为立体目标物的类别。在本实施方式中,立体目标物的类别(即预先存储于ecu21的模板的类别)包括“其他车辆”和“行人”。
61.进一步,ecu21通过关联技术的方法,取得所检测到的立体目标物相对于本车辆10的左端位置和右端位置。左端位置和右端位置分别由x坐标值和y坐标值的组合表示。
62.ecu21取得本车辆10的前端与立体目标物的y轴方向上的距离来作为目标物纵向距离dty。具体而言,ecu21取得立体目标物的左端位置的y坐标值和右端位置的y坐标值中的小的值来作为目标物纵向距离dty。
63.而且,ecu21取得本车辆10的左端或者右端与立体目标物的x轴方向上的距离来作为目标物横向距离dtx。具体而言,ecu21取得立体目标物的左端位置的x坐标值的大小和右端位置的x坐标值的大小中的小的值来作为基准值lq。进一步,ecu21取得基准值lq与“本车辆10的自车宽度wd(参照图1。)的一半的长度”的差量来作为目标物横向距离dtx(即dtx=lq-(1/2)
·
wd)。
64.若ecu21从前次接收到的图像(即在取得了最新图像的时间点的时间间隔δtc以前所取得的图像)也检测到从最后从前方摄像头31接收到的前方图像(最新图像)检测到的立体目标物时,ecu21取得立体目标物的移动速度。立体目标物的移动速度由目标物纵向速度vty和目标物横向速度vtx的组合表示。
65.ecu21通过对“目标物纵向距离dty的经过时间间隔δtc的期间的变化量δdty”除以时间间隔δtc来取得目标物纵向速度vty(即vty=δdty/δtc)。而且,ecu21通过对“目标物横向距离dtx的经过时间间隔δtc的期间的变化量δdtx”除以时间间隔δtc来取得目标物横向速度vtx(即vtx=δdtx/δtc)。
66.接着,对ecu21执行的自动制动控制进行说明。自动制动控制是如下控制:在判定为本车辆10与立体目标物(具体而言为后述的通过区域内目标物和横穿目标物)碰撞的可能性高时,即使没有驾驶员对本车辆10的制动器踏板的操作(即制动操作),也使制动机构45产生制动力bf。ecu21执行的自动制动控制包括“第1制动控制”和“第2制动控制”。
67.第1制动控制是为了避免与目标物(以下也称为“通过区域内目标物”。)的碰撞而执行的制动控制,所述目标物是其一部分或者全部存在于预想为本车辆10要行驶的区域(即本车辆通过区域)内且在该区域内停止着的目标物。第2制动控制是为了避免与候选目
标物(以下称为“横穿目标物”。)的碰撞而执行的制动控制,所述候选目标物是以与本车辆10的本车辆通过区域交叉的方式逐渐接近的目标物(即候选目标物)且是如后述的那样判定为与本车辆10碰撞的可能性高的目标物。候选目标物包括其他车辆和行人。
68.在执行自动制动控制时ecu21执行的以最大减速度amx使本车辆10减速的控制在以下也被称为“最大制动控制”。最大减速度amx是正值,方便起见,有时称为“第2减速度”。最大减速度amx被预先确定为与多数情况下制动机构45能够使得产生的最大的减速度as相等的值。方便起见,最大制动控制也被称为“用于高g制动的制动控制”。
69.另一方面,在执行自动制动控制时ecu21执行的以“暂定减速度aw”使本车辆10减速的控制在以下也被称为“暂定制动控制”。暂定减速度aw是“具有比最大减速度amx的大小小的大小的正值(0<aw<amx)”,方便起见,有时被称为“第1减速度”。因此,上述的第2减速度(最大减速度amx)的大小(|amx|)比上述第1减速度(暂定减速度aw)的大小(|aw|)大。暂定减速度aw的取得(算出)方法将在后面进行描述。
70.(自动制动控制-第1制动控制)
71.ecu21基于本车辆10一边维持当前时间点的“车速、偏航速率以及转向角”一边进行行驶这一假定,对本车辆通过区域进行预测。本车辆通过区域是本车辆10的左前端部和右前端部通过的线之间的区域(即本车辆10的前面通过的区域)。
72.当检测到通过区域内目标物时,ecu21判定后述的最大制动开始必要时间点和后述的转向开始必要时间点的哪个先(早)到来。ecu21在判定为最大制动开始必要时间点在转向开始必要时间点之前到来的情况下,代替最大制动控制,从“后述的暂定制动开始时间点”开始暂定制动控制,然后,根据需要在转向开始必要时间点开始最大制动控制。ecu21在判定为转向开始必要时间点在最大制动开始必要时间点之前到来的情况下,不执行暂定制动控制,而在最大制动开始必要时间点开始最大制动控制。
73.以下,使用图3所示的例子(以下,方便起见,称为“第1例”。),对第1制动控制进行详细的描述。在第1例中,本车辆10在时刻t0正在直行。由此,本车辆通过区域是虚线(直线)lr1与虚线(直线)lr2之间的区域。其他车辆61停止在本车辆通过区域内。由此,其他车辆61是通过区域内目标物。如图4所示,时刻t0的本车辆10的车速vs为速度vo,目标物纵向距离dty为纵向距离ly1。
74.若在目标物纵向距离dty成为“0”的时间点、车速vs比“0”大,则本车辆10会与其他车辆61碰撞。换言之,当目标物纵向距离dty在车速vs降低到“0”的时间点之前的时间点成为“0”时,本车辆10会与其他车辆61碰撞。
75.若本车辆10在时刻t0以后不减速(即当车速vs维持为速度vo时),目标物纵向距离dty如图4的单点划线ld0所示那样在时刻t5到达“0”。时刻t5是从时刻t0经过了碰撞余裕时间ttc1(=ly1/vo)的时间点。在该情况下,时刻t5的车速vs为速度vo,因此,本车辆10会在时刻t5与其他车辆61碰撞。这样,在车速vs不变化(减少)而被维持的情况下“本车辆10与通过区域内目标物碰撞的时间点(第1例的时刻t5)”在以下也被称为“预想碰撞时间点”。
76.接着,对用于避免本车辆10与其他车辆61的碰撞的最大制动控制进行研究。为了通过最大制动控制来避免本车辆10与其他车辆61的碰撞,在本车辆10从某时间点开始以最大减速度amx进行了减速的情况下车速vs成为了“0”时,需要目标物纵向距离dty为“0”(实际上为后述的余裕距离lm)以上的值。
77.以下,将以速度vo行驶的本车辆10从开始了以最大减速度amx进行减速的时间点到本车辆10停止的时间点为止所行驶的距离称为“制动纵向距离lsy”。从本车辆10开始了以最大减速度amx进行减速的时间点到本车辆10停止的时间点为止的时间为“vo/amx”,进一步,下式(1)成立。如图3和图4所示,第1例中的制动纵向距离lsy为纵向距离ly2。
78.lsy=(1/2)
·
(vo)2/amx
……
(1)
79.由此,若在目标物纵向距离dty与制动纵向距离lsy一致了的时间点开始最大制动控制(本车辆10以最大减速度amx开始减速),则本车辆10不会与其他车辆61碰撞。该情况下的车速vs由图4中的虚线lv1表示,该情况下的减速度as由图4中的虚线la1表示,该情况下的目标物纵向距离dty由图4中的虚线ld1表示。以下,目标物纵向距离dty与制动纵向距离lsy一致的时间点也被称为“最大制动开始必要时间点”或者“高g制动开始时间点”。在最大制动开始必要时间点到来之后(即最大制动开始必要时间点之后的时间点),即使开始最大制动控制,也无法使车速vs在目标物纵向距离dty成为“0”之前成为“0”的可能性高。
80.另外,本车辆10的驾驶员有时会注意到其他车辆61的存在而意图要通过对方向盘51的操作(即转弯操作)来避免与其他车辆61的碰撞。在该情况下,当需要转弯操作的时间点(以下也称为“转向开始必要时间点”。)为最大制动开始必要时间点之后的时间点时,最大制动控制在驾驶员的转弯操作之前被执行、驾驶员对最大制动控制感到烦恼的可能性变高。
81.于是,ecu21通过如以下所描述的那样算出转向开始必要时间点到来时的目标物纵向距离dty(以下也称为转弯纵向距离lr。),并对转弯纵向距离lr与制动纵向距离lsy进行比较,判定转向开始必要时间点和最大制动开始必要时间点中的哪个先(早、提前)到来。进一步,ecu21构成为在最大制动开始必要时间点在转向开始必要时间点之前到来的情况下,在最大制动开始必要时间点不开始最大制动控制。
82.转向开始必要时间点是即使为本车辆10在该时间点之后的时间点开始了以预定的躲避转弯半径rs进行转弯、也无法避免与通过区域内目标物的碰撞的时间点。换言之,在本车辆10在转向开始必要时间点之前的时间点以躲避转弯半径rs开始了转弯的情况下,能够避免与通过区域内目标物的碰撞。躲避转弯半径rs被预先设定为典型的驾驶员通过转弯操作避免与通过区域内目标物的碰撞时的典型的车辆的转弯半径。
83.本车辆10从转向开始必要时间点到来的时间点(即目标物纵向距离dty成为了与转弯纵向距离lr相等的时间点)开始以躲避转弯半径rs进行转弯的情况下的本车辆通过区域在以下也被称为“转弯通过区域”。转弯通过区域被规定为本车辆10与其他车辆61的端部(左端或者右端)相接的区域。
84.ecu21将本车辆10向左方转弯的情况下的暂定的转弯通过区域和本车辆10向右方转弯的情况下的暂定的转弯通过区域中的、转弯纵向距离lr小的区域决定为“最终的转弯通过区域”。在第1例中,最终的转弯通过区域是本车辆10向右方转弯的情况下的暂定的转弯通过区域,在图3中为虚线lr3与虚线lr4之间的区域。在该情况下,转弯纵向距离lr为纵向距离ly3。
85.假定为:在转弯纵向距离lr为纵向距离ly3的情况下,转弯纵向距离lr比制动纵向距离lsy短。在该情况下,最大制动开始必要时间点在转向开始必要时间点之前到来。因此,ecu21在最大制动开始必要时间点不开始最大制动控制。取而代之,如图4所示,ecu21在“暂
定制动开始时间点(时刻t1)”开始暂定制动控制,使本车辆10以暂定减速度aw进行减速,该“暂定制动开始时间点(时刻t1)”是前述的预想碰撞时间点(时刻t5)的制动开始时间ti之前的时间点。关于制动开始时间ti和暂定减速度aw的决定方法,将在后面进行描述。暂定减速度aw的大小比最大减速度amx的大小小,因此,即使在驾驶员开始转弯操作之前执行暂定制动控制,驾驶员感到违和感的可能性也小。方便起见,暂定制动开始时间点也被称为“第1时间点”。
86.暂定制动开始时间点到来时的目标物纵向距离dty也被称为暂定制动距离li。第1例中的暂定制动距离li为纵向距离ly4(参照图3。)。ecu21通过对车速vs(在本例中为速度vo)乘以制动开始时间ti来算出暂定制动距离li(即li=vs
·
ti)。ecu21在目标物纵向距离dty与暂定制动距离li一致的时间点已到来时,判定为暂定制动开始时间点已到来。
87.然后,若驾驶员在到转向开始必要时间点(即目标物纵向距离dty与转弯纵向距离lr一致的时间点、时刻t4)到来为止的期间中不进行转弯操作,则ecu21在转向开始必要时间点(时刻t4)开始最大制动控制。该情况下的车速vs由图4中的实线lv2表示,该情况下的减速度as由图4中的实线la2表示,该情况下的目标物纵向距离dty由图4中的实线ld2表示。如根据实线lv2和实线ld2可理解的那样,在时刻t7,“车速vs和目标物纵向距离dty”都为“0”。换言之,决定暂定减速度aw以使得:通过在转向开始必要时间点(时刻t4)开始最大制动控制,本车辆10不会与其他车辆61碰撞。
88.此外,在决定暂定制动控制和最大制动控制各自开始的定时时,考虑余裕时间tm(即tm=lm/vs),该余裕时间tm是对预定的余裕距离lm(参照图1。)除以决定那些控制定时的时间点的车速vs而得到的时间。但是,在图4的时间图(以及后述的图7和图9的时间图)中,余裕时间tm被作为“0”来处理。
89.如前述的那样,暂定制动开始时间点被确定为是预想碰撞时间点的制动开始时间ti之前的时间点。制动开始时间ti基于下式(2)来取得(算出)。在式(2)中,系数k1和系数k2是比“1”小的正的系数(固定值),系数k2比系数k1大(即0<k1<k2<1)。
90.ti=1/(k2-k1
·
vs)
……
(2)
91.图5表示基于式(2)决定的“车速vs与制动开始时间ti的关系”。如根据图5可理解的那样,车速vs越大,制动开始时间ti越长。系数k1和系数k2被预先进行适配以使得在典型的驾驶员注意到通过区域内目标物(以及横穿目标物)的存在的情况下,在开始为了具有余裕地避免碰撞所进行的驾驶操作(制动操作以及/或者转弯操作)的定时之后开始暂定制动控制。
92.暂定减速度aw被算出以使得后述的行驶距离ds1与后述的行驶距离ds2相互相等。
93.行驶距离ds1是在暂定制动开始时间点开始暂定制动控制、接着在转向开始必要时间点开始最大制动控制的情况下本车辆10在从暂定制动开始时间点到本车辆10停止为止的期间(时刻t1~时刻t7的期间)所行驶的距离。
94.行驶距离ds2是在不执行暂定制动控制、而在最大制动开始必要时间点开始最大制动控制的情况下本车辆10在从暂定制动开始时间点到本车辆10停止为止的期间(时刻t1~时刻t6的期间)所行驶的距离。
95.以下,进一步对暂定减速度aw的算出方法进行详细的说明。行驶距离ds1与由图4中的实线lv2、辅助线lp1以及辅助线lp2包围的区域的面积相等。
96.具体而言,该区域的面积与将时刻t1~时刻t4的期间(即作为执行暂定制动控制的期间的暂定制动期间tt)中的实线lv2作为一边的梯形的面积和将时刻t4~时刻t7的期间中的实线lv2作为斜边的直角三角形的面积之和相等。由此,行驶距离ds1通过下式(3)来算出。
97.ds1=(1/2)
·
{vo+(vo-aw
·
tt)}
·
tt
98.+(1/2)
·
(vo-aw
·
tt)2/amax
……
(3)
99.行驶距离ds2与由虚线lv1、辅助线lp1以及辅助线lp2包围的区域的面积相等。因此,行驶距离ds2通过下式(4)来算出。在式(4)中,tp是被称为“先行制动期间”的期间的长度。先行制动期间是从暂定制动开始时间点(时刻t1)到最大制动开始必要时间点(时刻t3)为止的期间。
100.ds2=vo
·
tp+(1/2)
·
vo2/amax
……
(4)
101.如上所述,暂定减速度aw是行驶距离ds1与行驶距离ds2相等的情况下的减速度。由此,当使式(3)的右边与式(4)的右边相互相等时,得到下式(5)。通过将式(5)中的速度vo(即本例的时刻t0的车速vs)置换为车速vs来得到下式(5a)。
102.tt2·
aw2-(amax
·
tt2+2
·
vo
·
tt)
·
aw
103.+2
·
amax
·
vo(tt-tp)=0
……
(5)
104.tt2·
aw2-(amax
·
tt2+2
·
vs
·
tt)
·
aw
105.+2
·
amax
·
vs(tt-tp)=0
……
(5a)
106.式(5a)是关于暂定减速度aw的2次方程式。ecu21取得式(5a)的解、且“0”~最大减速度amx的范围所包含的值来作为暂定减速度aw。
107.接着,对转向开始必要时间点在最大制动开始必要时间点之前(先)到来的情况下所执行的第1制动控制进行说明。例如如图3所示,在其他车辆61a与其他车辆61相比停止在占据本车辆通过区域的更多的部分的位置的情况下,转弯通过区域成为单点划线lr5与单点划线lr6之间的区域。
108.在该情况下,如图3所示,转弯纵向距离lr成为比“纵向距离ly3长的纵向距离ly5”。假定为:作为其结果,转向开始必要时间点为“时刻t4之前的时刻t2(参照图4。)”。在该情况下,转向开始必要时间点(即时刻t2)在最大制动开始必要时间点(即时刻t3)之前到来。
109.因此,不会发生在为了避免与其他车辆61a的碰撞而本车辆10的驾驶员需要开始转弯操作的时间点之前的时间点开始最大制动控制的现象(即,不必要强制动)。于是,在该情况下,不执行暂定制动控制。而且,在保持驾驶员不开始转弯操作的状态不变而制动开始必要时间(时刻t3)到来了时,ecu21在最大制动开始必要时间点开始最大制动控制。
110.(自动制动控制-第2制动控制-其他车辆)
111.接着,使用图6所示的例子(方便起见,以下称为“第2例”。),对横穿目标物(候选目标物)的类别为车辆(其他车辆62)的情况下的第2制动控制进行详细的说明。上述的第1制动控制是考虑了本车辆10为了避免碰撞而被使得转弯的情况的制动控制。与此相对,第2制动控制是考虑了横穿目标物(候选目标物)减速的情况的制动控制。
112.在第2例中,也与第1例同样地,本车辆10在时刻t0正在直行。由此,本车辆通过区域是虚线(直线)lr7与虚线(直线)lr8之间的区域。
113.作为候选目标物的其他车辆62在时刻t0正沿着与本车辆通过区域交叉的方向进行直行。候选目标物的行驶速度也被称为目标物速度vt。由此,其他车辆62的预想行驶区域(以下也被称为“横穿目标物通过区域”。)是虚线(直线)lr9与虚线(直线)lr10之间的区域。方便起见,横穿目标物通过区域也被称为“目标物通过区域”。
114.如图6所示,本车辆通过区域和横穿目标物通过区域具有交叉角度θi而交叉。假如本车辆通过区域与横穿目标物通过区域相互并行,则交叉角度θi为0
°
。
115.在交叉角度θi、目标物纵向速度vty(即目标物速度vt的y轴分量)以及目标物横向速度vtx(即目标物速度vt的x轴分量)之间,以下的式(6a)、式(6b)以及式(6c)的关系成立。在目标物速度vt、目标物纵向速度vty以及目标物横向速度vtx之间,下式(7)的关系成立。
116.vtx=vt
·
sin(θi)
……
(6a)
117.vty=vt
·
cos(θi)
……
(6b)
118.tan(θi)=vtx/vty
……
(6c)
119.vt2=vty2+vtx2……
(7)
120.本车辆通过区域与横穿目标物通过区域重叠的区域也被称为“交叉区域s”。在图6中,在交叉区域s画出了阴影线。
121.在本车辆通过区域与横穿目标物通过区域交叉的情况下,目标物纵向距离dty不是本车辆10与横穿目标物的y轴方向上的距离,而是属于交叉区域s的“与本车辆10的y轴方向上的距离最短的点ps”和本车辆10的y轴方向上的距离。因此,在第2例中,目标物纵向距离dty是点ps和本车辆10的y轴方向上的距离,该点ps是虚线lr7与虚线lr10的交点。
122.在第2例中,其他车辆62位于本车辆10的左侧。由此,目标物横向距离dtx是其他车辆62的前端(准确而言为右前端或者左前端)与本车辆10的左端的x轴方向上的距离。此外,在作为横穿目标物的其他车辆位于本车辆10的右侧的情况下,目标物横向距离dtx是其他车辆的前端与本车辆10的右端的x轴方向上的距离。
123.如图6所示,在时刻t0,车速vs为速度vo,目标物纵向距离dty为纵向距离ly6,目标物横向距离dtx为横向距离lx1。时刻t0的目标物速度vt为速度vt0,目标物横向速度vtx为速度vtx0。
124.在本车辆10和其他车辆62均不减速而维持了时刻t0的各自的速度的情况下,在本车辆10到达(进入)了交叉区域s的时间点(即目标物纵向距离dty到达了“0”的时间点),其他车辆62位于交叉区域s内时,两车辆会碰撞。同样地,在本车辆10和其他车辆62均不减速而维持了时刻t0的各自的速度的情况下,当在其他车辆62到达(进入)了交叉区域s的时间点(即目标物横向距离dtx到达了“0”的时间点),本车辆10位于交叉区域s内时,两车辆会碰撞。
125.第2例是如下例子:在本车辆10和其他车辆62均不减速而维持了时刻t0的各自的速度的情况下,在本车辆10开始了进入交叉区域s时,其他车辆62已经进入交叉区域s、且位于交叉区域s内。
126.在时刻t0以后,若本车辆10不减速(即当车速vs维持为速度vo时),则如图7的单点划线ld3所示,目标物纵向距离dty在时刻t6到达“0”。即,本车辆10在时刻t6进入交叉区域s。时刻t6是从时刻t0经过了碰撞余裕时间ttc2(=ly6/vo)的时间点。
127.在时刻t0以后,若其他车辆62不减速,则目标物横向速度vtx被维持为速度vtx0。
在该情况下,如图7的单点划线le1所示,目标物横向距离dtx在时刻t5到达“0”。即,其他车辆62在时刻t5进入交叉区域s。时刻t5是从时刻t0经过了其他车辆余裕时间ttct(=lx1/vtx0)的时间点,在第2例中为时刻t6之前的时刻。
128.然后,在本车辆10进入交叉区域s的时刻t6,目标物横向距离dtx成为横向距离lx2。该时间点的其他车辆62的位置在图6中由车辆位置62a表示。在第2例中,该横向距离lx2比“0”大且为“自车宽wd、其他车辆62的前后长度ltg与sin(θi)之积、以及预定值α之和”以下(即0<lx2≤wd+ltg
·
sin(θi)+α)。也即是,在第2例中,在本车辆10进入了交叉区域s的时间点,其他车辆62实质上位于交叉区域s内。由此,本车辆10在时刻t6会与其他车辆62碰撞。即,在第2例中,时刻t6为预想碰撞时间点。此外,预定值α基于根据前方图像取得的立体目标物的位置以及移动速度的误差(取得误差)来预先设定。
129.第2例中的制动纵向距离lsy基于上述式(1)来求出,在此为纵向距离ly7(参照图6。)。由此,目标物纵向距离dty与纵向距离ly7一致的时间点为最大制动开始必要时间点。在最大制动开始必要时间点开始了最大制动控制的情况下的车速vs由图7中的虚线lv3表示,该情况下的目标物纵向距离dty由图7中的虚线ld4表示。如虚线lv3所示,在时刻t8,车速vs到达“0”,本车辆10停止,目标物纵向距离dty到达“0”。由此,本车辆10停止在即将进入交叉区域s之前的位置,不会与其他车辆62碰撞。
130.另外,其他车辆62的驾驶员或者搭载于其他车辆62的自动制动装置等有时为了避免与本车辆10的碰撞而对其他车辆62进行制动来使其他车辆62减速。若在适当的时间点(以下也称为“目标物制动必要时间点”。)之前进行其他车辆62的制动,则其他车辆62不进入交叉区域s。由此,在这样的情况下本车辆10通过最大制动控制进行减速不能说是很好的。也即是,在目标物制动必要时间点为最大制动开始必要时间点之后的时间点的情况下,有可能进行不必要的最大制动控制(不必要强制动),会给本车辆10的驾驶员带来强烈的违和感。
131.于是,ecu21通过如以下描述那样算出目标物制动必要时间点到来时的目标物横向距离dtx来作为目标物制动横向距离ltx,并对目标物横向距离dtx与目标物制动横向距离ltx一致的时间点(即目标物制动必要时间点)和目标物纵向距离dty与制动纵向距离lsy(在第2例中为纵向距离ly7)一致的时间点(即最大制动开始必要时间点)进行比较,判定目标物制动必要时间点和最大制动开始必要时间点中的哪个先到来。进一步,ecu21构成为在最大制动开始必要时间点在目标物制动必要时间点之前到来的情况下,在最大制动开始必要时间点不开始最大制动控制。方便起见,目标物制动必要时间点也被称为“第2时间点”。
132.此外,实际上,ecu21通过求出目标物横向距离dtx与目标物制动横向距离ltx一致的时间点的目标物纵向距离dty来作为目标物制动纵向距离lty,并对目标物纵向距离dty与目标物制动纵向距离lty一致的时间点(即目标物制动必要时间点)和目标物纵向距离dty与制动纵向距离lsy一致的时间点(即最大制动开始必要时间点)进行比较,判定目标物制动必要时间点和最大制动开始必要时间点中的哪个先到来。
133.具体而言,第2例中的目标物制动横向距离ltx为横向距离lx3,目标物制动纵向距离lty为纵向距离ly8(参照图6。)。对横向距离lx3除以速度vtx0而得到的时间和对纵向距离ly8除以速度vo而得到的时间均与时刻t4~时刻t6的期间的长度相等(即lx3/vtx0=ly8/vo=t6-4)。
134.目标物制动必要时间点是即将如下时间点之前的时间点,该时间点是即使其他车辆62以预定的目标物减速度(设想目标物减速度)at开始了减速、其他车辆62也无法停止在紧接着交叉区域s之前的位置的时间点。换言之,在其他车辆62在目标物制动必要时间点之前的时间点以目标物减速度at开始了减速的情况下,其他车辆62不进入交叉区域s,能够避免与本车辆10的碰撞。目标物减速度at被预先设定为典型的驾驶员为了避免碰撞而使车辆产生的典型的减速度。
135.横穿目标物为其他车辆的情况下的目标物制动横向距离ltx与从横穿目标物(第2例中的其他车辆62)以目标物减速度at开始了减速的时间点到横穿目标物停止的时间点为止的期间中的目标物横向距离dtx的减少量(减少量的大小)相等。
136.正在以目标物速度vt(在第2例中为速度vt0)进行行驶的横穿目标物在“到通过以目标物减速度at进行减速而目标物速度vt成为
‘0’
为止的期间”所行驶的制动距离lo基于根据上述式(1)类推的下式(8)来计算。因此,目标物制动横向距离ltx基于下式(9)来算出。
137.lo=(1/2)
·
(vt)2/at
……
(8)
138.ltx=lo
·
sin(θi)
139.={(1/2)
·
(vt)2/at}
·
sin(θi)
……
(9)
140.假定为:目标物横向距离dtx成为与目标物制动横向距离ltx相等的时间点(即目标物制动必要时间点)是图7的时刻t4,目标物制动横向距离ltx是横向距离lx3。其他车辆62在时刻t4以目标物减速度at开始减速的情况下的目标物横向速度vtx由图7中的虚线lv4表示,该情况下的目标物横向距离dtx由图7中的实线le2表示。如虚线lv4所示,目标物横向速度vtx在时刻t10到达“0”,其他车辆62停止,目标物横向距离dtx到达“0”。由此,其他车辆62在进入交叉区域s之前停止,不会与本车辆10碰撞。
141.在最大制动开始必要时间点(时刻t3)在目标物制动必要时间点(时刻t4)之前(先)到来的情况下,ecu21在最大制动开始必要时间点不开始最大制动控制。取而代之,如图7所示,ecu21在作为预想碰撞时间点(时刻t6)的制动开始时间ti之前的时间点的“暂定制动开始时间点(时刻t1)”开始暂定制动控制,使本车辆10以暂定减速度aw进行减速。制动开始时间ti和暂定减速度aw被与第1制动控制同样地进行算出。ecu21通过对车速vs(在本例中为速度vo)乘以制动开始时间ti来算出暂定制动距离li(即li=vs
·
ti),在目标物纵向距离dty与暂定制动距离li一致的时间点到来时,判定为暂定制动开始时间点到来。第2例中的暂定制动距离li为纵向距离ly9。
142.此外,第2制动控制中的暂定制动期间(执行暂定制动控制的期间)tt是从暂定制动开始时间点(时刻t1)到目标物制动必要时间点(时刻t4)为止的期间。
143.然后,若其他车辆62在到目标物制动必要时间点(时刻t4)到来为止的期间中不开始减速,则ecu21在目标物制动必要时间点开始最大制动控制。该情况下的车速vs由图7中的实线lv5表示,该情况下的目标物纵向距离dty由图7中的实线ld5表示。如根据实线lv5和实线ld5可理解的那样,在时刻t9,“车速vs和目标物纵向距离dty”都为“0”。由此,本车辆10在进入交叉区域s之前停止,不会与其他车辆62碰撞。
144.接着,对在目标物制动必要时间点在最大制动开始必要时间点之前到来的情况下所执行的第2制动控制进行说明。例如如图7所示,假定为:时刻t0的其他车辆62的目标物横向速度vtx是“比速度vtx0高的速度vtx1”,因此,目标物制动必要时间点成为了“时刻t4之
前的时刻t2”。在该情况下,目标物制动横向距离ltx为横向距离lx4。
145.当其他车辆62在目标物制动必要时间点(时刻t2)以目标物减速度at开始减速时,目标物横向速度vtx如图7中的单点划线lv6所示那样变化,目标物横向距离dtx如图7的单点划线le3所示那样变化。在该情况下,在时刻t7,目标物横向速度vtx到达“0”,其他车辆62停止,目标物横向距离dtx到达“0”。由此,其他车辆62在进入交叉区域s之前停止,不会与本车辆10碰撞。
146.换言之,在其他车辆62在正以速度vtx1进行行驶的状态下在时刻t2(即目标物制动必要时间点)之前不开减速的情况下,其他车辆62进入交叉区域s的可能性高。于是,在该情况下(即在目标物制动必要时间点比最大制动开始必要时间点先到来的情况下),ecu21不执行暂定制动控制。而且,ecu21在最大制动开始必要时间点(即时刻t3)开始最大制动控制。
147.(自动制动控制-第2制动控制-行人)
148.接着,使用图8所示的例子(方便起见,以下称为“第3例”。),对横穿目标物的类别为行人63的情况下的第2制动控制进行详细的描述。
149.在第3例中,也与第1例和第2例同样地,本车辆10在时刻t0正在直行。由此,本车辆通过区域是虚线(直线)lr11与虚线(直线)lr12之间的区域。
150.行人63在时刻t0沿着与本车辆通过区域具有交叉角度θi而交叉的方向正以目标物速度vt进行直行。由此,行人63的预想走行区域(横穿目标物通过区域)是虚线(直线)lr13与虚线(直线)lr14之间的区域。
151.如图8所示,在时刻t0,车速vs为速度vo,目标物纵向距离dty为纵向距离ly10,目标物横向距离dtx为横向距离lx5。时刻t0的目标物横向速度vtx为速度vtx2。
152.如图9所示,在第3例中,在本车辆10不减速而维持了时刻t0的速度vo的情况下,如图9的单点划线ld6所示,目标物纵向距离dty在时刻t6到达“0”。即,本车辆10在时刻t6进入交叉区域s。时刻t6是从时刻t0经过了碰撞余裕时间ttc3(=ly10/vo)的时间点。
153.进一步,在时刻t0以后,若行人63不减速,则目标物横向速度vtx被维持为速度vtx2。在该情况下,如图9的单点划线le4所示,目标物横向距离dtx在时刻t5到达“0”。即,行人63在时刻t5进入交叉区域s。时刻t5是从时刻t0经过了行人余裕时间ttcp(=lx5/vtx2)的时间点,在第3例中为时刻t6之前的时刻。
154.然后,在本车辆10进入交叉区域s的时刻t6,目标物横向距离dtx成为横向距离lx6。该时间点的行人63的位置在图8中由行人位置63a表示。在第3例中,该横向距离lx6为“本车辆10的自车宽wd与预定值α之和(=wd+α)”以下。也即是,在第3例中,在本车辆10进入了交叉区域s的时间点,行人63实质上位于交叉区域s内。由此,本车辆10在时刻t6会与行人63碰撞。即,在第3例中,时刻t6是预想碰撞时间点。
155.第3例中的制动纵向距离lsy通过上述式(1)求出,在此为纵向距离ly11(参照图8。)。由此,目标物纵向距离dty与纵向距离ly11一致了的时间点为最大制动开始必要时间点。在最大制动开始必要时间点开始了最大制动控制的情况下的车速vs由图9中的虚线lv7表示。如虚线lv7所示,在时刻t8,车速vs到达“0”,本车辆10停止。此时,目标物纵向距离dty成为“0”。由此,本车辆10在进入交叉区域s之前停止,不会与行人63碰撞。
156.另外,行人63有时会为了避免与本车辆10的碰撞而停止。ecu21在横穿目标物的类
别为“行人”的情况下,将目标物制动横向距离ltx设定为预先确定的距离阈值lth(参照图8)。距离阈值lth为了避免与以与行人自身交叉的方式接近的车辆的碰撞而基于典型的行人所停止的位置来预先确定。距离阈值lth被设定为与典型的行人为了避免与车辆的碰撞而已停止时的所述行人与本车辆通过区域的距离(预定余裕距离)大致相等、或者对预定余裕距离加上预定的余裕而得到的距离。
157.在横穿目标物的类别为“行人”的情况下,若在目标物横向距离dtx到达“作为目标物制动横向距离ltx的距离阈值lth”的时间点(即目标物制动必要时间点)之前,横穿目标物开始减速,则即使不执行最大制动控制,本车辆10和行人63也不会碰撞。此外,行人63在目标物制动必要时间点(在第3例中为时刻t3)开始减速的情况下的目标物横向速度vtx由图9的虚线lv8表示。如由虚线lv8所示,行人63开始减速到停止为止的期间极短。
158.于是,ecu21通过对“目标物横向距离dtx与作为目标物制动横向距离ltx的距离阈值lth一致的时间点(即目标物制动必要时间点)”和“目标物纵向距离dty与制动纵向距离lsy(在第3例中为纵向距离ly11)一致的时间点(即最大制动开始必要时间点)”进行比较,判定目标物制动必要时间点和最大制动开始必要时间点中的哪个先到来。
159.若在最大制动开始必要时间点到来了的时间点,逐渐接近本车辆通过区域的行人的目标物横向距离dtx比距离阈值lth大,则之后行人有可能在进入交叉区域s之前停止。
160.因此,在最大制动开始必要时间点(时刻t2)在“作为逐渐接近本车辆通过区域的行人的目标物横向距离dtx与距离阈值lth一致的时间点的目标物制动必要时间点(时刻t3)”之前到来的情况下,ecu21在最大制动开始必要时间点不开始最大制动控制。取而代之,如图9所示,ecu21在作为预想碰撞时间点(时刻t6)的制动开始时间ti之前的时间点的“暂定制动开始时间点(时刻t1)”开始暂定制动控制,使本车辆10以暂定减速度aw进行减速。制动开始时间ti和暂定减速度aw被与第1制动控制同样地进行算出。
161.然后,若行人63在到目标物制动必要时间点(时刻t3)到来为止的期间中不停止,则ecu21在目标物制动必要时间点开始最大制动控制。该情况下的车速vs由图9中的实线lv9表示。如前述的那样,这样的制动控制的结果,在时刻t9,“车速vs和目标物纵向距离dty”均成为“0”。由此,本车辆10在进入交叉区域s之前停止,不会与行人63碰撞。
162.与此相对,在目标物制动必要时间点(逐渐接近本车辆通过区域的移动中的行人的目标物横向距离dtx与距离阈值lth一致了的时间点)在最大制动开始必要时间点之前到来的情况下,该行人注意到本车辆10的存在,因此,进入交叉区域s的可能性高。
163.这样的情况下的车速vs的例子由图9中的单点划线lv10表示。在该情况下,时刻t0的车速vs是比速度vo小的速度v1。在该情况下,ecu21不执行暂定制动控制。而且,ecu21在与行人63的目标物横向距离dtx成为了距离阈值lth时(即作为最大制动开始必要时间点的时刻t4),开始最大制动控制。
164.(具体的工作)
165.接着,对ecu21的具体的工作进行说明。ecu21的cpu(以下也简称为“cpu”。)每当经过预定时间时执行图10中由流程图表示的“自动制动处理例程”。此外,cpu每当经过预定时间时执行未图示的例程,基于前方图像取得前方图像所包含的立体目标物的“左端位置、右端位置以及移动速度等”。
166.因此,当成为适当的定时时,cpu从图10的步骤1000开始处理而进入步骤1005,判
定是否存在通过区域内目标物。
167.若存在通过区域内目标物,则cpu在步骤1005中判定为“是”,进入步骤1010,基于上述式(1)取得通过区域内目标物的制动纵向距离lsy。
168.接着,cpu进入步骤1015,如上所述那样取得转弯纵向距离lr。即,cpu取得能够避免与通过区域内目标物的碰撞的“躲避转弯半径rs的转弯通过区域”、且“转弯纵向距离lr最小的转弯通过区域”,取得与该转弯通过区域对应的转弯纵向距离lr。
169.进一步,cpu进入步骤1020,判定制动纵向距离lsy是否比转弯纵向距离lr大(即最大制动开始必要时间点是否比转向开始必要时间点先到来)。若制动纵向距离lsy比转弯纵向距离lr大,则cpu在步骤1020中判定为“是”,进入步骤1025,如上所述那样取得对于通过区域内目标物的暂定制动距离li。
170.更具体地描述时,cpu通过将车速vs应用于上述式(2),取得制动开始时间ti。而且,cpu通过对车速vs乘以制动开始时间ti,取得暂定制动距离li(即li=vs
·
ti)。进一步,cpu进入步骤1030。此外,cpu也可以在结束了步骤1025的处理之后,直接进入后述的步骤1055。在该情况下,省略后述的步骤1047的处理。
171.另一方面,若制动纵向距离lsy为转弯纵向距离lr以下,则cpu在步骤1020中判定为“否”,直接进入步骤1030。此外,若步骤1005的判定条件不成立(即若不存在通过区域内目标物),则cpu在步骤1005中判定为“否”,直接进入步骤1030。
172.在步骤1030中,cpu判定是否存在横穿目标物。更具体地描述时,cpu判定是否存在正在接近本车辆通过区域的目标物(即候选目标物),在存在候选目标物的情况下,判定该候选目标物的类别是否为“其他车辆”或者“行人”。此外,在本实施方式中,其他车辆也包括自动二轮车辆。进一步,cpu判定是否具有本车辆10维持了当前的车速vs的情况下本车辆10存在于交叉区域内的期间与候选目标物维持了当前的目标物速度vt(候选目标物速度)的情况下候选目标物存在于交叉区域内的期间相重叠的部分(以下称为“重叠期间”。)。
173.若存在重叠期间,则认定为具有该重叠期间的候选目标物为横穿目标物。在该情况下,cpu在步骤1030中判定为“是”,进入步骤1035。在步骤1035中,cpu基于上述式(1)取得关于该横穿目标物的制动纵向距离lsy。
174.接着,cpu进入步骤1040,取得横穿目标物的目标物制动纵向距离lty。更具体地描述时,cpu执行图11中由流程图表示的“目标物制动纵向距离取得处理例程”。因此,cpu从图11的步骤1100开始处理而进入步骤1105,判定横穿目标物的类别是否为“其他车辆”。
175.若横穿目标物的类别为“其他车辆”,则cpu在步骤1105中判定为“是”,依次执行以下说明的步骤1110~步骤1125的处理。接着,cpu进入步骤1195,结束图11的例程的处理,进入图10的步骤1045。
176.步骤1110:cpu基于上述式(6c)取得交叉角度θi。
177.步骤1115:cpu基于上述式(7)取得目标物速度vt。
178.步骤1120:cpu通过将交叉角度θi和目标物速度vt代入到上述式(9),取得目标物制动横向距离ltx。
179.步骤1125:cpu基于目标物制动横向距离ltx,取得目标物制动纵向距离lty。即,cpu取得目标物横向距离dtx成为目标物制动横向距离ltx的时间点的目标物纵向距离dty来作为目标物制动纵向距离lty。在本实施方式中,cpu将目标物制动纵向距离lty作为目标
物制动横向距离ltx与“对车速vs除以目标物横向速度vtx而得到的值”之积来加以取得(算出)(即lty=ltx
·
vs/vtx)。
180.另一方面,若横穿目标物的类别不是“其他车辆”(即若横穿目标物的类别为“行人”),则cpu在步骤1105中判定为“否”,进入步骤1130,将目标物制动横向距离ltx设定为与距离阈值lth相等的值。接着,cpu进入步骤1125。
181.cpu在图10的步骤1045中,判定制动纵向距离lsy是否比目标物制动纵向距离lty大(即,最大制动开始必要时间点是否在目标物制动必要时间点之前到来)。若制动纵向距离lsy比目标物制动纵向距离lty大,则cpu在步骤1045中判定为“是”,进入步骤1047,判定是否处于未取得暂定制动距离li的状态。
182.即,cpu判定是否由于在执行本次的本例程的处理的期间未执行步骤1025的处理而处于未取得暂定制动距离li的状态。若满足未取得暂定制动距离li的状态,则cpu在步骤1047中判定为“是”,进入步骤1050,通过与步骤1025同样的处理确定暂定制动距离li。接着,cpu进入步骤1055。
183.另一方面,若不满足未取得暂定制动距离li的状态,则cpu在步骤1047中判定为“否”,直接进入步骤1055。此外,若步骤1030的判定条件不成立(即若不存在横穿目标物),则cpu在步骤1030中判定为“否”,直接进入步骤1055。而且,若步骤1045的判定条件不成立(即,若制动纵向距离lsy为目标物制动纵向距离lty以下),则cpu在步骤1045中判定为“否”,直接进入步骤1055。
184.在步骤1055中,cpu判定“最大制动条件”是否成立。最大制动条件是在处于应该执行最大制动控制的状态(即本车辆10应该以最大减速度amx进行减速的状态)时成立的条件。具体而言,最大制动条件是在以下的(条件a)~(条件c)中的至少一个成立时成立的条件。
185.(条件a):在对于通过区域内目标物开始了暂定制动控制之后,通过区域内目标物的目标物纵向距离dty为“对转弯纵向距离lr加上余裕距离lm而得到的距离”以下(即dty≤lr+lm)。
186.(条件b):在对于横穿目标物开始了暂定制动控制之后,横穿目标物的目标物纵向距离dty为“对目标物制动纵向距离lty加上余裕距离lm而得到的距离”以下(即dty≤lty+lm)。
187.(条件c):不开始暂定制动控制,并且,目标物纵向距离dty为“对制动纵向距离lsy加上余裕距离lm而得到的距离”以下(即dty≤lsy+lm)。
188.例如若存在成为第2制动控制的对象的横穿目标物、且制动纵向距离lsy比目标物制动纵向距离lty小,则对于该横穿目标物不执行暂定制动控制。在该情况下,在与横穿目标物的目标物纵向距离dty成为了与“对制动纵向距离lsy加上余裕距离lm而得到的距离”相等时,(条件c)成立。换言之,在最大制动开始必要时间点的上述的余裕时间tm之前的时间点,(条件c)成立。
189.此外,对于“(条件a)、(条件b)以及(条件c)”以及后述的“(条件d)和(条件e)”是否成立,可使用在执行了本次的本例程时所取得的各种参数(转弯纵向距离lr和目标物制动纵向距离lty等)。换言之,在这些条件成立与否的判定中,在前次(或者那以前)执行了本例程时所取得的参数不被进行参照。
190.在(条件a)、(条件b)以及(条件c)均不成立的情况下,cpu在步骤1055中判定为“否”,进入步骤1070,判定“暂定制动条件”是否成立。
191.暂定制动条件是在处于应该执行暂定制动控制的状态(即本车辆10应该以暂定减速度aw进行减速的状态)时成立的条件。更具体地描述时,暂定制动条件是在以下的(条件d)和(条件e)中的至少一个成立时成立的条件。
192.(条件d):通过区域内目标物的目标物纵向距离dty为“对关于通过区域内目标物的暂定制动距离li加上余裕距离lm而得到的距离”以下(即dty≤li+lm)。
193.(条件e):横穿目标物的目标物纵向距离dty(即交叉区域s与本车辆10的y轴方向距离)为“对关于横穿目标物的暂定制动距离li加上余裕距离lm而得到的距离”以下(即dty≤li+lm)。
194.在(条件d)和(条件e)均不成立的情况下,暂定制动条件不成立,因此,cpu在步骤1070中判定为“否”,直接进入步骤1095,暂时结束本例程的处理。即,在该情况下,不执行自动制动控制。
195.另一方面,在最大制动条件不成立的状态下暂定制动条件成立的情况下,cpu在步骤1055中判定为“否”,进一步,在步骤1070中判定为“是”,依次执行以下说明的步骤1075~步骤1092的处理。然后,cpu进入步骤1095。
196.步骤1075:cpu基于上述式(5a)取得暂定减速度aw。
197.步骤1080:cpu将目标减速度atg的值设定为暂定减速度aw。
198.步骤1085:cpu进行暂定制动控制的通知。具体而言,cpu在显示器33显示表示正在执行暂定制动控制的记号直到经过预定时间。而且,cpu使扬声器34再现表示正在执行暂定制动控制的警告音直到经过预定时间。
199.步骤1090:cpu向制动控制ecu23发送包括目标减速度atg的制动力控制要求。
200.步骤1092:cpu向驱动控制ecu22发送目标驱动转矩ftg的值被设定为了“0”的驱动力控制要求。
201.其结果,本车辆10被进行控制以使得本车辆10的减速度与暂定减速度aw一致。即,开始暂定制动控制。然后,若不开始用于避免与通过区域内目标物的碰撞的转弯操作、或者横穿目标物不减速,则在到最大制动条件成立为止的期间中执行暂定制动控制。
202.另一方面,当最大制动条件成立时,cpu在步骤1055中判定为“是”,进入步骤1060,将目标减速度atg的值设定为最大减速度amx。接着,cpu进入步骤1065,进行最大制动控制的通知。更具体地描述时,cpu在显示器33显示表示正在执行最大制动控制的记号直到经过预定时间。而且,cpu使扬声器34再现表示正在执行最大制动控制的警告音直到经过预定时间。
203.进一步,cpu进入步骤1090。在该情况下,代替暂定制动控制,开始最大制动控制直到本车辆10停止。
204.以上,如说明的那样,在横穿目标物的类别为“其他车辆”时,ecu21基于目标物减速度at确定目标物制动必要时间点。另一方面,在横穿目标物的类别为“行人”时,ecu21基于距离阈值lth确定目标物制动必要时间点。因此,根据本辅助装置,能够避免与横穿目标物的碰撞,并且,能够避免产生不必要强制动。
205.以上,对本发明涉及的驾驶辅助装置的实施方式进行了说明,但本发明并不限定
于上述实施方式,只要不脱离本发明的目的,就可以进行各种变更。例如,在本实施方式中,成为第2制动控制的对象的横穿目标物的类别为“其他车辆”和“行人”。但是,成为第2制动控制的对象的横穿目标物的类别也可以与这些类别不同。
206.例如,成为第2制动控制的对象的横穿目标物的类别也可以代替“其他车辆”而包括“普通乘用车”、“自动二轮车”以及“大型车辆”。在该情况下,对这些类别各自应用的目标物减速度at也可以是互不相同的值。
207.而且,在本实施方式中,在横穿目标物的类别为“行人”时,目标物横向距离dtx(即横穿目标物与本车辆10的左端或者右端的x轴方向上的距离)成为与距离阈值lth相等的时间点为目标物制动必要时间点。但是,也可以取得横穿目标物与y轴(即本车辆10的车宽方向的中心轴)的距离成为与预定的阈值相等的时间点来作为目标物制动必要时间点。
208.而且,本实施方式涉及的ecu21基于上述式(5a)取得了暂定减速度aw。更具体地描述时,在取得暂定减速度aw时并未考虑制动机构45的制动器油的升压速度。换言之,并未考虑从制动控制ecu23开始制动机构45的控制到制动力bf成为与所希望的值相等为止的时间。但是,ecu21也可以在取得暂定减速度aw时考虑制动器油的升压速度。例如,ecu21也可以在取得行驶距离ds1和行驶距离ds2时考虑每单位时间的制动力bf的增加量(即制动器油的升压速度)。
209.而且,本实施方式涉及的ecu21基于通过区域内目标物和横穿目标物的目标物纵向距离dty,判定了最大制动条件和暂定制动条件各自是否成立。例如,当横穿目标物的目标物纵向距离dty成为“对目标物制动纵向距离lty加上余裕距离lm而得到的距离”以下时,ecu21判定为了(条件b)成立。但是,ecu21也可以基于时间的经过,判定最大制动条件和暂定制动条件各自是否成立。例如,ecu21也可以在某时间点(例如图7中的时刻t0)取得到时刻t1为止的时间(即时刻t1与时刻t0的差量),在车速vs和目标物速度vt保持不变化而时刻t1已到来时,判定为(条件b)成立。
210.而且,ecu21的cpu在决定暂定制动控制和最大制动控制各自开始的定时时考虑了余裕时间tm。但是,考虑余裕时间tm的处理也可以省略。例如,ecu21也可以在最大制动开始必要时间点或者目标物制动必要时间点开始最大制动控制。
211.而且,ecu21也可以通过对上述式(2)代入目标物纵向速度vty来代替车速vs,从而取得(算出)制动开始时间ti。
212.而且,本实施方式涉及的最大减速度amx是固定值。但是,最大减速度amx也可以是变化的值。例如,ecu21也可以通过关联技术的方法取得(推定)本车辆10具备的车轮与路面之间的摩擦系数,所取得的摩擦系数越大,则将最大减速度amx设定为越大的值。
213.而且,本实施方式涉及的ecu21基于目标物纵向速度vty和目标物横向速度vtx来取得了交叉角度θi(参照上述式(6c)。),基于交叉角度θi取得了目标物制动横向距离ltx(参照上述式(9)。)。换言之,ecu21将横穿目标物通过区域作为直线形状的区域来进行了取得。但是,ecu21也可以基于目标物纵向速度vty和目标物横向速度vtx的每单位时间的变化量,将横穿目标物通过区域作为直线形状或者圆弧形状的区域来进行取得,并且,基于所取得的横穿目标物通过区域来取得目标物制动横向距离ltx。进一步,ecu21也可以基于转向角度θs,将本车辆通过区域作为直线形状或者圆弧形状的区域来取得,并且,基于所取得的本车辆通过区域来取得目标物制动横向距离ltx。
214.而且,本实施方式涉及的本辅助装置具备前方摄像头31来作为用于检测立体目标物的传感器(目标物检测装置)。但是,作为目标物检测装置,本辅助装置也可以代替前方摄像头31、或者在前方摄像头31的基础上具备毫米波雷达装置和lidar(light detection and ranging)装置等。
215.而且,通过ecu21实现的功能也可以由多个ecu来实现。例如,检测立体目标物、并且取得与立体目标物有关的信息(即目标物纵向距离dty和目标物横向距离dtx等)的处理也可以由搭载于前方摄像头31的ecu来实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1