车辆的减振控制装置和减振控制方法与流程
1.本发明涉及车辆的减振控制装置和减振控制方法。本发明例如用于车辆的减振控制装置,该减振控制装置被配置为基于被预测为在从当前时间点起经过了规定时间的时间点车轮将要通过的通过预测位置的路面位移关联值,产生用于减小簧上的振动的控制力。
背景技术:
2.已知一种从车身独立悬挂各车轮的悬架。在日本特开平8-127213所记载的具备关联装置的悬架中,包括悬架弹簧和减震器。关联装置使用以下的算式(a)来推定从簧下向车身传递的振动输入f。
3.f=c
×
(dz0/dt)+k
×
z0……
(a)
4.c:减震器的阻尼系数
5.z0:路面位移
6.k:悬架弹簧的弹簧常数
7.关联装置使用以下的算式(b)来运算抵消上述振动输入f的目标控制力fct,并使致动器产生与目标控制力fct一致的控制力。
8.fct=-α
×
f
……
(b)
9.α:权重系数,0≤α≤1
10.关联装置运算振动输入f的“包括簧上共振频率的低频带”中的峰值电平值pl和“包括簧下共振频率的高频带”中的峰值电平值ph。关联装置在峰值电平值pl大于峰值电平值ph的情况下,将权重系数α决定为“a1”,在峰值电平值pl小于峰值电平值ph的情况下,将权重系数α决定为“大于a1的a2”。这是因为,与上述低频带相比,上述高频带中的人的敏感度更高。
11.在此,悬架弹簧理论上产生的弹簧力(以下,称为“理论弹簧力”。)与车轮和车身之间的上下方向的相对位移成比例。而且,减震器理论上产生的阻尼力(以下,称为“理论阻尼力”。)与上述相对位移的速度成比例。但是,悬架弹簧实际所产生的弹簧力(实际弹簧力)有随着因路面位移z0而在车轮产生的振动的振幅(即,上述路面位移z0的振幅)变小而变得大于上述理论弹簧力的倾向。同样地,减震器实际所产生的阻尼力(实际阻尼力)有随着上述振幅变小而变得大于上述理论阻尼力的倾向。需要说明的是,认为这些现象的原因是在悬架产生的摩擦。
12.因此,上述振幅越小,越需要比根据上述算式(b)运算的目标控制力大的目标控制力。但是,关联装置基于路面位移z0的低频带的大小和高频带的大小来决定权重系数α,因此在上述车轮产生的振动的振幅小的情况下,难以运算所需的目标控制力。其结果是,在上述振动的振幅小的情况下,关联装置很可能无法对簧上进行减振。
技术实现要素:
13.本发明提供一种车辆的减振控制装置,该减振控制装置即使在因路面位移而在车
轮产生的振动的振幅小的情况下,也能适当地减小簧上的振动。
14.本发明的第一方案是一种减振控制装置。所述减振控制装置具备:控制力产生装置,被配置为在通过悬架从车辆的车身悬挂出的至少一个车轮与所述车身之间产生上下方向的控制力;以及电子控制单元,被配置为对所述控制力产生装置进行控制来变更所述控制力,由此减小由所述车辆行驶时根据上下方向的路面位移在所述车轮产生的上下方向的振动经由所述悬架被传递而引起的所述车身的振动。所述悬架被配置为在所述车轮与所述车身之间的上下方向产生与相对位移关联值相应的悬架力,该相对位移关联值是与所述车轮和所述车身之间的上下方向的相对位移关联的值。因所述路面位移而在所述车轮产生的振动的振幅越小,所述悬架实际所产生的悬架力比与所述相对位移关联值成比例的理论悬架力大得越多。所述电子控制单元被配置为:运算振幅指标值,该振幅指标值表示规定的采样区间内的多个作为与所述路面位移关联的值的路面位移关联值的振幅,以由所述振幅指标值表示的所述振幅越小则从当前时刻起经过了规定时间的时间点的作为所述控制力的目标值的目标控制力的大小越大的方式决定控制增益,基于被预测为在从所述当前时刻起经过了所述规定时间的时间点所述车轮将要通过的通过预测位置的所述路面位移关联值和所述控制增益,运算抵消所述悬架力的分量的方向的所述目标控制力,其中,该悬架力的分量对应于与所述通过预测位置处的所述车轮的上下方向的位移关联的值,以在所述车轮从所述通过预测位置通过的时间点所述控制力与所述目标控制力一致的方式,控制所述控制力产生装置。
15.在由振幅指标值表示的采样区间的路面位移关联值的振幅小的情况下,在通过预测位置处悬架所产生的实际的悬架力很可能会大于理论悬架力。因此,与通过预测位置的车轮的上下方向的位移对应的悬架力的分量也变大。根据上述第一方案,以由振幅指标值表示的振幅越小则目标控制力的大小越大的方式决定控制增益,使用所述控制增益来运算目标控制力。由此,即使在由于因路面位移而在车轮产生的振动的振幅变小引起实际的悬架力大于理论悬架力的情况下,也能可靠地减小对应于与通过预测位置的车轮的上下方向的位移关联的值的悬架力的分量,从而能适当地对车身进行减振。
16.在所述第一方案中,也可以是,所述电子控制单元被配置为:基于所述采样区间内的路面位移关联值和所述车辆的当前时间点的速度,运算所述采样区间的所述路面位移关联值的时序变化,运算表示所述时序变化的规定的第一频带的路面位移关联值的振幅的第一振幅指标值,运算表示所述时序变化的规定的第二频带的路面位移关联值的振幅的第二振幅指标值,所述规定的第二频带具有所述第一频带的最大频率以上的最小频率,以由所述第一振幅指标值表示的所述振幅越小则所述控制增益越大并且由所述第二振幅指标值表示的所述振幅越小则所述控制增益越大的方式控制所述控制增益,通过将所述通过预测位置的所述路面位移关联值与所述控制增益相乘来运算所述目标控制力,因由所述第二振幅指标值表示的所述振幅的减小而引起的所述控制增益的增大量被设定为大于因由所述第一振幅指标值表示的所述振幅的减小而引起的所述控制增益的增大量。
17.由于控制力产生装置的控制延迟,控制力产生装置产生与目标控制力一致的控制力的定时(产生定时)可能会比车轮从通过预测位置通过的定时(通过定时)延迟。在采样区间的路面位移关联值的频率成为高频率的情况下,若产生定时比通过定时延迟,则该产生定时的车轮的接地位置处的路面位移可能会与通过预测位置的路面位移大不相同。在该情
况下,上述产生定时的车轮的接地位置处的路面位移所需的控制力的朝向也可能会与上述通过预测位置的路面位移所需的目标控制力的朝向相反。如果控制力产生装置产生反方向的控制力,则会对车身进行加振。
18.在上述构成中,也可以是,因由所述第二振幅指标值表示的所述振幅的减小而引起的所述控制增益的增大量被设定为大于因由所述第一振幅指标值表示的所述振幅的减小而引起的所述控制增益的增大量。由此,以高频带的路面位移关联值的振幅越大则控制增益越小的方式决定控制增益,因此,运算出更小的目标控制力。因此,根据上述构成,即使因产生定时比通过定时延迟而控制力产生装置产生了反方向的控制力,也能降低因该控制力而使车身大幅加振的可能性。
19.在所述第一方案中,也可以是,所述电子控制单元被配置为:基于所述采样区间内的路面位移关联值和所述车辆的当前时间点的速度,运算所述采样区间的所述路面位移关联值的时序变化,运算表示所述时序变化的规定的第一频带的路面位移关联值的振幅的第一振幅指标值,运算表示所述时序变化的规定的第二频带的路面位移关联值的振幅的第二振幅指标值,所述规定的第二频带具有所述第一频带的最大频率以上的最小频率,以由所述第二振幅指标值表示的所述振幅与由所述第一振幅指标值表示的所述振幅的比例越大则所述控制增益越小的方式决定所述控制增益,通过将所述通过预测位置的所述路面位移关联值与所述控制增益相乘来运算所述目标控制力。
20.在上述构成中,也可以是,电子控制单元被配置为以由第二振幅指标值表示的振幅与由第一振幅指标值表示的振幅的比例越大则控制增益越小的方式决定控制增益。以采样区间的高频带的路面位移关联值的振幅越大则控制增益越小的方式决定控制增益,因此运算出高频带的路面位移关联值的振幅越大则越小的目标控制力。因此,根据上述构成,即使因产生定时比通过定时延迟而控制力产生装置产生了反方向的控制力,也能降低因该控制力而使车身大幅加振的可能性。
21.在所述第一方案中,也可以是,所述悬架力理论上由包含与所述相对位移成比例的弹簧项的算式表示,因所述路面位移而在所述车轮产生的振动的振幅越小,所述悬架实际所产生的悬架力的与弹簧项相当的分量的大小与所述弹簧项的大小相比越大。所述电子控制单元也可以被配置为:运算所述目标控制力,该目标控制力的大小是将由所述通过预测位置的所述路面位移关联值确定的路面位移与所述控制增益相乘而得到的值的大小,并且该目标控制力的方向是抵消与所述通过预测位置处的所述车轮的上下方向的位移对应的所述弹簧项的分量的方向。
22.根据上述构成,以由振幅指标值表示的采样区间的路面位移关联值的振幅越小则目标控制力的大小越大的方式决定控制增益,因此,即使在因上述振幅变小而“悬架实际所产生的悬架力的与弹簧项相当的分量的大小”大于弹簧项的大小的情况下,也能可靠地减小与通过预测位置的车轮的上下方向的位移对应的上述悬架力的与弹簧项相当的分量,从而能适当地对车身进行减振。
23.在所述第一方案中,也可以是,所述悬架力理论上由包含与所述相对位移的速度成比例的阻尼项的算式表示,因所述路面位移而在所述车轮产生的振动的振幅越小,所述悬架实际所产生的悬架力的与阻尼项相当的分量的大小与所述阻尼项的大小相比越大。所述电子控制单元也可以被配置为:运算目标控制力,该目标控制力的大小是将由所述通过
预测位置的所述路面位移关联值确定的路面位移的时间微分值与所述控制增益相乘而得到的值的大小,并且该目标控制力的方向是抵消与所述通过预测位置处的所述车轮的上下方向的位移的速度对应的所述阻尼项的分量的方向。
24.根据上述构成,以由振幅指标值表示的振动的振幅越小则目标控制力的大小越大的方式决定控制增益,因此,即使在因上述振动的振幅变小而“悬架实际所产生的悬架力的与阻尼项相当的分量的大小”大于阻尼项的大小的情况下,也能可靠地减小与通过预测位置的车轮的上下方向的位移的速度对应的上述悬架力的与阻尼项相当的分量,从而能适当地对车身进行减振。
25.在所述第一方案中,也可以是,所述悬架力理论上由包含与所述相对位移成比例的弹簧项和与所述相对位移的速度成比例的阻尼项的算式表示,因所述路面位移而在所述车轮产生的振动的振幅越小,所述悬架实际所产生的悬架力的与弹簧项相当的分量的大小与所述弹簧项的大小相比越大,因所述路面位移而在所述车轮产生的振动的振幅越小,所述悬架实际所产生的悬架力的与阻尼项相当的分量的大小与所述阻尼项的大小相比越大,所述电子控制单元被配置为:以由所述振幅指标值表示的所述振幅越小则所述目标控制力越大的方式决定第一控制增益和第二控制增益,运算第一目标控制力,该第一目标控制力的大小是将由所述通过预测位置的所述路面位移关联值确定的路面位移的时间微分值乘以所述第一控制增益而得到的值的大小,并且该第一目标控制力的方向是抵消与所述通过预测位置处的所述车轮的上下方向的位移的速度对应的所述阻尼项的分量的方向,运算第二目标控制力,该第二目标控制力的大小是将由所述通过预测位置的所述路面位移关联值确定的路面位移乘以所述第二控制增益而得到的值的大小,并且该第二目标控制力的方向是抵消与所述通过预测位置处的所述车轮的上下方向的位移对应的所述弹簧项的分量的方向,以在所述车轮从所述通过预测位置通过的时间点产生所述第一目标控制力与所述第二目标控制力的合力的方式控制所述控制力产生装置。
26.根据上述构成,以由振幅指标值表示的采样区间的路面位移关联值的振幅越小则目标控制力的大小越大的方式决定第一控制增益和第二控制增益,因此,即使在“悬架实际所产生的悬架力的与弹簧项相当的分量的大小”大于弹簧项的大小、“悬架实际所产生的悬架力的与阻尼项相当的分量的大小”大于阻尼项的大小的情况下,也能适当地对车身进行减振。
27.本发明的第二方案是一种减振控制方法。所述减振控制方法是如下的减振控制方法:对被配置为在通过悬架从车辆的车身悬挂出的至少一个车轮与所述车身之间产生上下方向的控制力的控制力产生装置进行控制来变更所述控制力,由此减小由所述车辆行驶时根据上下方向的路面位移在所述车轮产生的上下方向的振动经由所述悬架被传递而引起的所述车身的振动。所述悬架被配置为在所述车轮与所述车身之间的上下方向产生与相对位移关联值相应的悬架力,该相对位移关联值是与所述车轮和所述车身之间的上下方向的相对位移关联的值,因所述路面位移而在所述车轮产生的振动的振幅越小,所述悬架实际产生的悬架力比与所述相对位移关联值成比例的理论悬架力大得越多。所述减振控制方法包括:运算振幅指标值,该振幅指标值表示规定的采样区间内的多个作为与所述路面位移关联的值的路面位移关联值的振幅;以由所述振幅指标值表示的所述振幅越小则从当前时刻起经过了规定时间的时间点的作为所述控制力的目标值的目标控制力的大小越大的方
式决定控制增益;基于被预测为在从所述当前时刻起经过了所述规定时间的时间点所述车轮将要通过的通过预测位置的所述路面位移关联值和所述控制增益,运算抵消所述悬架力的分量的方向的所述目标控制力,其中,该悬架力的分量对应于与所述通过预测位置处的所述车轮的上下方向的位移关联的值;以及在所述车轮从所述通过预测位置通过的时间点,以所述控制力与所述目标控制力一致的方式,控制所述控制力产生装置。
28.根据上述第二方案,以由振幅指标值表示的采样区间的路面位移关联值的振幅越小则目标控制力的大小越大的方式决定控制增益,使用所述控制增益来运算目标控制力。因此,即使在实际的悬架力大于理论悬架力的情况下,也能可靠地减小对应于与通过预测位置的车轮的上下方向的位移关联的值的悬架力的分量,从而能适当地对车身进行减振。
附图说明
29.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
30.图1是应用了本发明的第一实施方式的预见(preview)减振控制装置(以下,称为“第一装置”。)的车辆的概略构成图。
31.图2是第一装置的概略构成图。
32.图3是表示车辆的单轮模型的图。
33.图4是用于说明预见减振控制的图。
34.图5是用于说明预见减振控制的图。
35.图6是用于说明预见减振控制的图。
36.图7是表示第一控制增益映射图的图。
37.图8是表示第二控制增益映射图的图。
38.图9是表示第一装置的电子控制装置的cpu所执行的例程的流程图。
39.图10是表示在图9所示的例程的控制增益获取处理中电子控制装置的cpu所执行的子例程的流程图。
40.图11是表示本发明的第二实施方式的第一控制增益映射图的图。
41.图12是表示本发明的第二实施方式的第二控制增益映射图的图。
42.图13是表示本发明的第二实施方式的预见减振控制装置的电子控制装置的cpu所执行的例程的流程图。
43.图14是表示本发明的第二实施方式的变形例的第一控制增益映射图的图。
44.图15是表示本发明的第二实施方式的变形例的第二控制增益映射图的图。
具体实施方式
45.(第一实施方式)
46.<构成>
47.本发明的第一实施方式的车辆的减振控制装置(以下,第一装置)应用于图1所示的车辆10。如图2所示,该第一装置以下也称为“减振控制装置20”。
48.如图1所示,车辆10具备左前轮11fl、右前轮11fr、左后轮11rl以及右后轮11rr。左前轮11fl通过车轮支承构件12fl被可旋转地支承于车身10a。右前轮11fr通过车轮支承构
件12fr被可旋转地支承于车身10a。左后轮11rl通过车轮支承构件12rl被可旋转地支承于车身10a。右后轮11rr通过车轮支承构件12rr被可旋转地支承于车身10a。
49.需要说明的是,在不需要区分左前轮11fl、右前轮11fr、左后轮11rl以及右后轮11rr的情况下,将它们称为“车轮11”。同样地,将左前轮11fl和右前轮11fr称为“前轮11f”。同样地,将左后轮11rl和右后轮11rr称为“后轮11r”。将车轮支承构件12fr至12rl称为“车轮支承构件12”。
50.车辆10还具备左前轮悬架13fl、右前轮悬架13fr、左后轮悬架13rl以及右后轮悬架13rr。这些悬架13fr至13rl是独立悬挂式的悬架,但也可以是其他形式的悬架。这些悬架13fr至13rl的详细内容在以下进行详细说明。
51.左前轮悬架13fl从车身10a悬挂左前轮11fl,并包含悬架臂14fl、减震器15fl以及悬架弹簧16fl。右前轮悬架13fr从车身10a悬挂右前轮11fr,并包含悬架臂14fr、减震器15fr以及悬架弹簧16fr。
52.左后轮悬架13rl从车身10a悬挂左后轮11rl,并包含悬架臂14rl、减震器15rl以及悬架弹簧16rl。右后轮悬架13rr从车身10a悬挂右后轮11rr,并包含悬架臂14rr、减震器15rr以及悬架弹簧16rr。
53.需要说明的是,在不需要区分左前轮悬架13fl、右前轮悬架13fr、左后轮悬架13rl以及右后轮悬架13rr的情况下,将它们称为“悬架13”。同样地,将悬架臂14fr至14rl称为“悬架臂14”。同样地,将减震器15fr至15rl称为“减震器15”。同样地,将悬架弹簧16fr至16rl称为“悬架弹簧16”。
54.悬架臂14将车轮支承构件12连结于车身10a。需要说明的是,在图1中,针对一个悬架13仅图示了一个悬架臂14,但也可以针对一个悬架13设置多个悬架臂14。
55.减震器15配设于车身10a与悬架臂14之间,在上端与车身10a连结,在下端与悬架臂14连结。悬架弹簧16经由减震器15弹性安装于车身10a与悬架臂14之间。即,悬架弹簧16的上端与车身10a连结,其下端与减震器15的缸筒(cylinder)连结。需要说明的是,在这样的悬架弹簧16的弹性安装方式中,减震器15也可以配设于车身10a与车轮支承构件12之间。
56.而且,在本例中,减震器15是阻尼力不可变式的减震器,但减震器15也可以是阻尼力可变式的减震器。而且,悬架弹簧16也可以不经由减震器15地弹性安装于车身10a与悬架臂14之间。即,也可以是,悬架弹簧16的上端与车身10a连结,其下端与悬架臂14连结。需要说明的是,在这样的悬架弹簧16的弹性安装方式中,减震器15和悬架弹簧16配设于车身10a与车轮支承构件12之间。
57.将车辆10的车轮11和减震器15等构件中的比悬架弹簧16靠车轮11侧的部分称为“簧下50或簧下构件50(参照图3。)”。相对于此,将车辆10的车身10a和减震器15等构件中的比悬架弹簧16靠车身10a侧的部分称为“簧上51或簧上构件51(参照图3。)”。
58.而且,在车身10a与悬架臂14fr至14rl的每一个之间设有左前轮主动致动器17fl、右前轮主动致动器17fr、左后轮主动致动器17rl以及右后轮主动致动器17rr。这些主动致动器17fr至17rl分别相对于减震器15fr至15rl以及悬架弹簧16fr至16rl并列设置。
59.需要说明的是,在不需要区分左前轮主动致动器17fl、右前轮主动致动器17fr、左后轮主动致动器17rl以及右后轮主动致动器17rr的情况下,将它们称为“主动致动器17”。同样地,将左前轮主动致动器17fl和右前轮主动致动器17fr称为“前轮主动致动器17f”。同
样地,将左后轮主动致动器17rl和右后轮主动致动器17rr称为“后轮主动致动器17r”。
60.主动致动器17基于来自图2所示的电子控制装置30的控制指令,产生控制力fc。控制力fc是为了对簧上51进行减振而作用于车身10a与车轮11之间(即,簧上51与簧下50之间)的上下方向的力。需要说明的是,电子控制装置30被称为ecu30,有时也被称为“控制单元30或控制器30”。而且,主动致动器17有时也被称为“控制力产生装置17”。主动致动器17是电磁式的主动悬架装置。主动致动器17与减震器15和悬架弹簧16等协作,而构成主动悬架。
61.如图2所示,减振控制装置20除了上述的ecu30以外,还包括存储装置30a、位置信息获取装置31、无线通信装置32以及预见传感器33。而且,减振控制装置20包括上述的主动致动器17fr至17rl。
62.ecu30包括微型计算机。微型计算机包括cpu、rom、ram以及接口(i/f)等。cpu通过执行储存于rom的指令(程序、例程)来实现各种功能。
63.ecu30与可读写信息的非易失性存储装置30a连接。在本例中,存储装置30a是硬盘驱动器。ecu30能将信息存储(保存)于存储装置30a,读取存储(保存)于存储装置30a的信息。需要说明的是,存储装置30a并不限定于硬盘驱动器,是可读写信息的存储装置或存储介质即可。
64.ecu30与位置信息获取装置31、无线通信装置32以及预见传感器33连接。
65.位置信息获取装置31具备gnss(global navigation satellite system:全球卫星导航系统)接收器和地图数据库。gnss接收器接收用于检测车辆10的当前时刻的位置(当前位置)的“来自人造卫星的信号(例如,gnss信号)”。在地图数据库中存储有道路地图信息等。位置信息获取装置31是基于gnss信号来获取车辆10的当前位置(例如,纬度和经度)的装置,例如是导航装置。
66.需要说明的是,ecu30基于位置信息获取装置31所获取到的当前位置的履历来确定当前时刻的“车辆10的行进方向td”。而且,gnss信号包含移动速度,ecu30基于gnss信号所包含的移动速度来确定当前时间点的“作为车辆10的速度的车速v1”。
67.无线通信装置32是用于经由网络与云40进行信息的通信的无线通信终端。云40具备与网络连接的“管理服务器42和多个存储装置44a至44n”。在不需要区分一个或多个存储装置44a至44n的情况下,将它们称为“存储装置44”。
68.管理服务器42具备cpu、rom、ram以及接口(i/f)等。管理服务器42进行存储于存储装置44的数据的检索和读取,并且将数据写入存储装置44。
69.在存储装置44中存储有预见参照数据45。车辆10和其他车辆中的至少一方(以下,称为“收集车辆”。)在路面实际地行驶时获取到的簧下位移z1、位置信息相关联(相互建立关联)并登记于预见参照数据45。换言之,收集车辆将行驶中的车轮11的位置与该车轮11的位置处的簧下位移z1建立关联并发送至管理服务器42,管理服务器42将它们存储于存储装置44来作为预见参照数据45。
70.簧下位移z1是在收集车辆在路面行驶时接受所述路面的位移而在上下方向振动的簧下50(参照图3。)的上下方向的位移。位置信息是获取到簧下位移z1的时刻的“表示获取到该簧下位移z1的车轮11的位置(例如,纬度和经度)的信息”。需要说明的是,车轮11的位置是基于车辆10的位置和车辆的行进方向td来计算出的。在图2中,作为被登记为预见参
照数据45的“簧下位移z1和位置信息”的一个例子,示出了簧下位移“z1a”和位置信息“xa,ya”。
71.预见传感器33只要能像例如摄像机传感器、lidar(激光雷达)以及雷达那样获取表示车辆10的前方的路面的上下位移的值(称为“路面位移z
0”)即可,可以是本技术领域中任意的预见传感器。预见传感器33在后述的变形例中使用。
72.而且,ecu30经由驱动电路(未图示)分别与左前轮主动致动器17fl、右前轮主动致动器17fr、左后轮主动致动器17rl以及右后轮主动致动器17rr连接。
73.ecu30基于各车轮11的后述的通过预测位置的簧下位移z1,运算用于对簧上51进行减振的目标控制力fct,以在各车轮11从通过预测位置通过时使主动致动器17产生与目标控制力fct对应(一致)的控制力fc的方式,控制主动致动器17。
74.<基本的预见减振控制的概要>
75.以下,对减振控制装置20所执行的基本的预见减振控制的概要进行说明。图3示出路面55上的车辆10的单轮模型。
76.弹簧52相当于悬架弹簧16,阻尼器53相当于减震器15,致动器54相当于主动致动器17。
77.在图3中,簧上51的质量被标记为簧上质量m2。上述的簧下50的上下方向的位移被标记为簧下位移z1。而且,簧上51的上下方向的位移被表示为簧上位移z2。簧上位移z2是与各车轮11的位置对应的簧上51的上下方向的位移。弹簧52的弹簧常数被标记为弹簧常数(等效弹簧常数)k。阻尼器53的阻尼系数被标记为阻尼系数(等效阻尼常数)c。致动器54所产生的力被标记为控制力fc。
78.而且,z1和z2的时间微分值分别被标记为dz1和dz2,z1和z2的二阶时间微分值分别被标记为ddz1和ddz2。需要说明的是,以下,规定为:关于z1和z2而言向上方的位移为正,关于弹簧52、阻尼器53以及致动器54等所产生的力而言向上为正。
79.在图3所示的车辆10的单轮模型中,簧上51由根据路面位移z0在簧下50(车轮11)产生的上下方向的振动经由悬架13被传递而振动。关于簧上51的上下方向的运动的运动方程式可以由算式(1)表示。
80.m2ddz2=c(dz1-dz2)+k(z1-z2)-fc
……
(1)
81.假定算式(1)中的阻尼系数c固定。但是,实际的阻尼系数会根据悬架13的行程速度而变化,因此,例如,也可以将阻尼系数c设定为根据行程h的时间微分值而变化的值。
82.算式(1)中的“c(dz1-dz2)”是表示减震器15与簧上51和簧下50之间的上下方向的相对位移(行程h)的速度成比例地产生的理论的力的项,被称为“阻尼项”。算式(1)中的“k(z1-z2)”是表示悬架弹簧16与行程h成比例地产生的理论的力的项,被称为“弹簧项”。算式(1)中的“c(dz1-dz2)+k(z1-z2)”表示悬架13所产生的理论的力(理论悬架力)。
83.而且,在通过控制力fc完全地抵消了簧上51的振动的情况下(即,簧上加速度ddz2、簧上速度dz2以及簧上位移z2分别成为零的情况下),控制力fc由算式(2)表示。
84.fc=cdz1+kz1……
(2)
85.因此,使簧上51的振动衰减的控制力fc能由算式(3)表示,其中,将控制增益设为α。需要说明的是,控制增益α是比0大并且1以下的任意的常数。
86.fc=α(cdz1+kz1)
……
(3)
87.而且,若将算式(3)应用于算式(1),则算式(1)可以由以下的算式(4)表示。
88.m2ddz2=c(dz1-dz2)+k(z1-z2)-α(cdz1+kz1)
……
(4)
89.若将该算式(4)进行拉普拉斯变换并整理,则能得到以下的算式(5)。即,从簧下位移z1至簧上位移z2的传递函数由算式(5)表示。需要说明的是,算式(5)中的“s”为拉普拉斯算子。
[0090][0091]
根据算式(5),传递函数会根据α进行变化。可确认的是,如果α是大于0且1以下的任意的值,则传递函数的大小会确实地小于“1”(即,能减小簧上51的振动)。而且,在α为1的情况下,传递函数的大小为“0”,因此,可确认的是簧上51的振动被完全地抵消。基于算式(3),目标控制力fct能由以下的算式(6)表示。需要说明的是,算式(6)中的增益β1相当于αc,增益β2相当于αk。
[0092]
fct=β1
×
dz1+β2
×
z1……
(6)
[0093]
目标控制力fct作用于抵消与通过预测位置处的簧下位移z1对应的悬架力的分量的方向。即,目标控制力fct的阻尼项对应分量(β
×
dz1)作用于抵消与通过预测位置处的簧下速度dz1对应的阻尼项的分量(c
×
dz1)的方向,目标控制力fct的弹簧项对应分量(β
×
z1)作用于抵消与通过预测位置处的簧下位移z1对应的弹簧项的分量(k
×
z1)的方向。目标控制力fct是用于减小经由悬架13传递至簧上51(车身10a)的“因路面位移z0引起的簧下50(车轮11)的振动”的力。
[0094]
ecu30预先获取(预读)车轮11将来会通过的位置(通过预测位置)处的簧下位移z1,通过将获取到的簧下位移z1应用于算式(6)来运算目标控制力fct。然后,ecu30在车轮11从通过预测位置通过的定时(即,在产生应用于算式(6)的簧下位移z1的定时),使致动器54产生与目标控制力fct对应的控制力fc。由此,在车轮11从通过预测位置通过时(即,在产生应用于算式(6)的簧下位移z1时),通过所述控制力fc来减小经由悬架13传递至簧上51的“因通过预测位置的路面位移z0而在车轮11产生的振动”,因此,能适当地减小簧上51(车身10a)的振动。
[0095]
以下,参照图4至图6对减振控制装置20的工作的例子进行说明。图4示出了在当前时刻tp沿箭头a1所示的方向以车速v1行驶的车辆10。需要说明的是,在以下的说明中,前轮11f和后轮11r是左右任意侧的车轮,前轮11f和后轮11r的移动速度视作与车速v1相同。
[0096]
在图4中,线lt是假想的时间轴t。当前、过去以及未来的时刻t的前轮11f的移动行进路径上的簧下位移z1由时间t的函数z1(t)表示。因此,前轮11f的当前时刻tp的位置(接地位置)pf0的簧下位移z1被表示为z1(tp)。而且,后轮11r的当前时刻tp的位置pr0的簧下位移z1是比当前时刻tp提前“前轮11f移动轴距长l所用的时间(l/v1)”的时刻“tp-l/v1”的前轮11f的簧下位移z1。因此,当前时刻tp的后轮11r的簧下位移z1被表示为z1(tp-l/v1)。
[0097]
首先,对前轮11f的预见减振控制进行说明。ecu30确定比当前时刻tp延后前轮预读时间tpf(未来)的前轮11f的通过预测位置pf1。需要说明的是,前轮预读时间tpf被预先设定为从ecu30确定通过预测位置pf1起至前轮主动致动器17f输出与目标控制力fcft对应的控制力fcf为止所需要的时间。
[0098]
前轮11f的通过预测位置pf1是沿着作为被预测为前轮11f移动的行进路径的前轮移动预测行进路径从当前时刻tp的位置pf0离开前轮预读距离lpf(=v1
×
tpf)的位置。如后文所详细记述的那样,位置pf0是基于位置信息获取装置31所获取到的车辆10的当前位置而计算出的。
[0099]
那么,ecu30从云40预先获取车辆10的当前位置的附近区域(后述的准备区间)的预见参照数据45的一部分。ecu30基于所确定的通过预测位置pf1和预先获取的预见参照数据45的一部分,获取簧下位移z1(tp+tpf)。
[0100]
需要说明的是,ecu30也可以像以下那样获取簧下位移z1(tp+tpf)。首先,ecu30将所确定的通过预测位置pf1发送至云40。云40基于该通过预测位置pf1和预见参照数据45,获取与表示通过预测位置pf1的位置信息相关联的簧下位移z1(tp+tpf)。云40将该簧下位移z1(tp+tpf)发送至ecu30。
[0101]
ecu30运算作为簧下位移z1(tp+tpf)的时间微分值的簧下速度dz1(tp+tpf)。然后,ecu30将簧下速度dz1(tp+tpf)应用于以下的算式(7)的簧下速度dz1,并且将簧下位移z1(tp+tpf)应用于算式(7)的簧下位移z1,由此运算目标控制力fcft(=β1f
×
dz1(tp+tpf)+β2f
×
z1(tp+tpf))。
[0102]
fcft=β1f
×
dz1+β2f
×
z1……
(7)
[0103]
需要说明的是,算式(7)的“β1f”称为“前轮第一控制增益β1f”,算式(7)的“β2f”称为“前轮第二控制增益β2f”。
[0104]
ecu30将包含目标控制力fcft的控制指令发送至前轮主动致动器17f,以使前轮主动致动器17f产生与目标控制力fcft对应(一致)的控制力fcf。
[0105]
如图5所示,前轮主动致动器17f在从当前时刻tp延后前轮预读时间tpf的“时刻tp+tpf”(即,前轮11f实际地从通过预测位置pf1通过的定时)产生与目标控制力fcft对应的控制力fcf。因此,前轮主动致动器17f能在适当的定时产生控制力fcf,该控制力fcf能对因前轮11f的通过预测位置pf1的簧下位移z1而产生的簧上51进行减振。
[0106]
接着,对后轮11r的预见减振控制进行说明。ecu30确定比当前时刻tp延后后轮预读时间tpr(未来)的后轮11r的通过预测位置pr1。后轮预读时间tpr被预先设定为从ecu30确定通过预测位置pr1起至后轮主动致动器17r输出与目标控制力fcrt对应的控制力fcr为止所需要的时间。
[0107]
需要说明的是,在前轮主动致动器17f和后轮主动致动器17r是不同的主动致动器的情况下,前轮预读时间tpf和后轮预读时间tpr被预先设定为不同的值。在前轮主动致动器17f和后轮主动致动器17r是相同的主动致动器的情况下,前轮预读时间tpf和后轮预读时间tpr被预先设定为相同的值。
[0108]
ecu30将假定后轮11r沿与前轮11f相同的行进路径前进的情况下的后轮11r的移动预测行进路径从当前时刻tp的位置pr0离开后轮预读距离lpr(=v1
×
tpr)的位置确定为通过预测位置pr1。如后文所详细记述的那样,位置pr0是基于位置信息获取装置31所获取到的车辆10的当前位置而计算出的。
[0109]
该通过预测位置pr1的簧下位移z1是从“前轮11f位于后轮11r的当前时刻的位置pr0的时刻(tp-l/v1)”延后后轮预读时间tpr的簧下位移z1,因此能表示为z1(tp-l/v1+tpr)。
[0110]
ecu30基于所确定的通过预测位置pr1和预先获取的预见参照数据45的一部分,获取簧下位移z1(tp-l/v1+tpr)。
[0111]
需要说明的是,ecu30也可以像以下那样获取簧下位移z1(tp-l/v1+tpr)。首先,ecu30将所确定的通过预测位置pr1发送至云40。云40基于该通过预测位置pr1和预见参照数据45,获取与表示通过预测位置pr1的位置信息相关联的簧下位移z1(tp-l/v1+tpr)。云40将该簧下位移z1(tp-l/v1+tpr)发送至ecu30。
[0112]
ecu30运算作为簧下位移z1(tp-l/v1+tpr)的时间微分值的簧下速度dz1(tp-l/v1+tpr)。ecu30将簧下速度dz1(tp-l/v1+tpr)应用于以下的算式(8)的簧下速度dz1,并且将簧下位移z1(tp-l/v1+tpr)应用于算式(8)的簧下位移z1,由此运算目标控制力fcrt(=β1r
×
dz1(tp-l/v1+tpr)+β2r
×
z1(tp-l/v1+tpr))。
[0113]
fcrt=β1r
×
dz1+β2r
×
z1……
(8)
[0114]
需要说明的是,算式(8)的“β1r”称为“后轮第一控制增益β1r”,算式(8)的“β2r”称为“后轮第二控制增益β2r”。
[0115]
前轮第一控制增益β1f和后轮第一控制增益β1r被设定为彼此不同的值。这是因为左前轮悬架13fl和右前轮悬架13fr的阻尼系数cf与左后轮悬架13rl和右后轮悬架13rr的阻尼系数cr不同。需要说明的是,在阻尼系数cf和阻尼系数cr相同的情况下,前轮第一控制增益β1f和后轮第一控制增益β1r被设定为相同的值。在不需要区分前轮第一控制增益β1f和后轮第一控制增益β1r的情况下,将它们称为“第一控制增益β1”。
[0116]
前轮第二控制增益β2f和后轮第二控制增益β2r被设定为彼此不同的值。这是因为左前轮悬架13fl和右前轮悬架13fr的弹簧常数kf与左后轮悬架13rl和右后轮悬架13rr的弹簧常数kr不同。需要说明的是,在弹簧常数kf和弹簧常数kr相同的情况下,前轮第二控制增益β2f和后轮第二控制增益β2r被设定为相同的值。在不需要区分前轮第二控制增益β2f和后轮第二控制增益β2r的情况下,将它们称为“第二控制增益β2”。
[0117]
ecu30将包含目标控制力fcrt的控制指令发送至后轮主动致动器17r,以使后轮主动致动器17r产生与目标控制力fcrt对应(一致)的控制力fcr。
[0118]
如图6所示,后轮主动致动器17r在比当前时刻tp延后后轮预读时间tpr的“时刻tp+tpr”(即,后轮11r实际地从通过预测位置pr1通过的定时),产生与目标控制力fcrt对应的控制力fcr。因此,后轮主动致动器17r能在适当的定时产生控制力fcr,该控制力fcr能对因后轮11r的通过预测位置pr1的簧下位移z1而产生的簧上51适当地进行减振。
[0119]
以上是簧上51的减振控制,像这样的簧上51的减振控制被称为“预见减振控制”。
[0120]
(工作的概要)
[0121]
以下,对减振控制装置20的工作的概要进行说明。ecu30从预见参照数据45获取与对应于包含各车轮11的通过预测位置的规定的采样区间ssmp的位置的位置信息相关联的簧下位移z1(多个簧下位移z1),获取该簧下位移z1的绝对值来作为采样位移z1smp。ecu30运算作为表示采样位移z1smp的振幅的指标值的振幅指标值va。作为一个例子,cpu运算采样位移z1smp的平均值来作为振幅指标值va。所述例子中的振幅指标值va的值越小,表示上述振幅越小。需要说明的是,也可以将对采样位移z1smp实施了仅使规定的截止频率以下的频带通过的低通滤波之后的输出值用作上述平均值。
[0122]
然后,ecu30将振幅指标值va应用于图7所示的第一控制增益映射图mapβ1(va),由
此获取前轮第一控制增益β1f和后轮第一控制增益β1r。而且,ecu30将振幅指标值va应用于图8所示的第二控制增益映射图mapβ2(va),由此获取前轮第二控制增益β2f和后轮第二控制增益β2r。
[0123]
第一控制增益映射图mapβ1(va)预先存储于ecu30的rom。第一控制增益映射图mapβ1(va)规定前轮第一控制增益β1f和后轮第一控制增益β1r与振幅指标值va的关系。如图7所示,根据第一控制增益映射图mapβ1(va),前轮第一控制增益β1f和后轮第一控制增益β1r的值被规定为:振幅指标值va越小,则前轮第一控制增益β1f和后轮第一控制增益β1r的值越大(换言之,振幅指标值va越大,则前轮第一控制增益β1f和后轮第一控制增益β1r的值越小)。同样地,如图8所示,根据第二控制增益映射图mapβ2(va),前轮第二控制增益β2f和后轮第二控制增益β2r的值被规定为:振幅指标值va越小,则前轮第二控制增益β2f和后轮第二控制增益β2r的值越大(换言之,振幅指标值va越大,则前轮第二控制增益β2f和后轮第二控制增益β2r的值越小)。
[0124]
然后,ecu30通过将前轮第一控制增益β1f和前轮第二控制增益β2f应用于上述算式(7)来运算前轮目标控制力fcft。同样地,ecu30通过将后轮第一控制增益β1r和后轮第二控制增益β2r应用于上述算式(8)来运算后轮目标控制力fcrt。
[0125]
由振幅指标值va表示的振幅越小,由于悬架13的摩擦的影响,减震器15实际所产生的阻尼力比与行程速度(dz1-dz2)成比例的理论阻尼力大得越多,悬架弹簧16实际所产生的弹簧力比与行程(z1-z2)成比例的理论弹簧力大得越多。即,悬架13实际所产生的悬架力大于理论悬架力。因此,将会由于控制力fc而减小的悬架力的与通过预测位置处的簧下位移z1相当的分量也变大。如上所述,第一控制增益β1和第二控制增益β2成为振幅指标值va越小则越大的值,因此,运算出增大了第一控制增益β1和第二控制增益β2的增加量的目标控制力fct。因此,根据本实施方式,即使在采样位移z1smp的振幅小的情况下,也能可靠地减小对应于与通过预测位置处的簧下位移z1关联的值的悬架力的分量,从而能适当地减小簧上51的振动。
[0126]
(具体的工作)
[0127]
<预见减振控制例程>
[0128]
ecu30的cpu(以下,在标记为“cpu”的情况下,除非另有说明,否则指的是ecu30的cpu。)每当经过规定时间就执行在图9中由流程图示出的预见减振控制例程。
[0129]
因此,当成为规定的定时时,cpu从图9的步骤900开始处理并按顺序执行步骤905至步骤940,然后进入步骤995而暂时结束本例程。
[0130]
步骤905:cpu从位置信息获取装置31获取与车辆10的当前位置相关的信息,确定(获取)各车轮11的当前位置、车速v1以及车辆10的行进方向td。
[0131]
更详细而言,cpu向地图数据库所包含的道路地图信息映射上次的当前位置和这次的当前位置,并将从上次的当前位置朝向这次的当前位置的方向确定为车辆10的行进方向td。需要说明的是,上次的当前位置意思是指在上次所执行的本例程的步骤905中cpu获取到的车辆10的当前位置。而且,这次的当前位置意思是指在这次的步骤905中cpu获取到的车辆10的当前位置。
[0132]
在ecu30的rom中预先存储有表示车辆10的gnss接收器的搭载位置与各车轮11的位置的关系的位置关系数据。从位置信息获取装置31获取到的车辆10的当前位置相当于
gnss接收器的搭载位置,因此,cpu通过参照车辆10的当前位置、车辆10的行进方向td以及上述位置关系数据来确定各车轮11的当前位置。位置信息获取装置31所接收的gnss信号包含与移动速度相关的信息,cpu基于gnss信号来确定车速v1。
[0133]
步骤910:cpu像以下所述那样确定前轮移动预测行进路径和后轮移动预测行进路径。前轮移动预测行进路径是被预测为前轮11f此后将会移动的行进路径,后轮移动预测行进路径是被预测为后轮11r此后将会移动的行进路径。作为一个例子,cpu基于各车轮11的当前位置、车辆10的行进方向td以及上述位置关系数据,确定前轮移动预测行进路径和后轮移动预测行进路径。
[0134]
步骤915:cpu执行用于获取第一控制增益β1和第二控制增益β2的控制增益获取例程。需要说明的是,在图10中会对控制增益获取例程的详细内容进行说明。
[0135]
步骤920:cpu根据事先从云40获取到的预见参照数据45(参照后述的步骤940。)获取前轮通过预测位置pf1和后轮通过预测位置pr1的簧下位移z1。需要说明的是,在步骤920中获取到的簧下位移z1有时也被称为“预见位移z
1”。
[0136]
步骤925:cpu对步骤920中获取到的簧下位移z1进行时间微分,由此运算前轮通过预测位置pf1和后轮通过预测位置pr1的簧下速度dz1。需要说明的是,在步骤925中获取到的簧下速度dz1有时也被称为“预见速度dz
1”。
[0137]
步骤930:cpu将在后述的控制增益获取例程中获取到的前轮第一控制增益β1f和前轮第二控制增益β2f以及前轮11f的预见位移z1和前轮11f的预见速度dz1应用于算式(7),由此运算前轮11f的目标控制力fcft。而且,cpu将在后述的控制增益获取例程中获取到的后轮第一控制增益β1r和后轮第二控制增益β2r以及后轮11r的预见位移z1和后轮11r的预见速度dz1应用于算式(8),由此运算后轮11r的目标控制力fcrt。
[0138]
步骤935:cpu将包含前轮11f的目标控制力fcft的控制指令分别发送至前轮主动致动器17f,将包含后轮11r的目标控制力fcrt的控制指令分别发送至后轮主动致动器17r。
[0139]
步骤940:cpu在前轮通过预测位置pf1到达准备区间的终点的规定距离之前的位置的情况下,从云40的预见参照数据45获取以前轮通过预测位置pf1为起点的准备区间中的“簧下位移z1和位置信息”,并将获取到的簧下位移z1和位置信息储存至ram。
[0140]
需要说明的是,准备区间是以到达准备区间的终点时的前轮通过预测位置pf1为起点,以从该前轮通过预测位置pf1沿前轮移动预测行进路径离开规定的准备距离的位置为终点的区间。而且,准备距离被预先设定为比上述前轮预读距离lpf充分大的值。
[0141]
在此,对步骤940的处理进行详细说明。cpu将包含准备区间的位置信息的获取请求从无线通信装置32发送至管理服务器42。管理服务器42从预见参照数据45获取与对应于获取请求所包含的准备区间所包含的位置的位置信息相关联的簧下位移z1,并将位置信息和簧下位移z1发送至减振控制装置20。当减振控制装置20接收到位置信息和簧下位移z1时,cpu将接收到的位置信息和簧下位移z1储存至ram。
[0142]
<控制增益获取例程>
[0143]
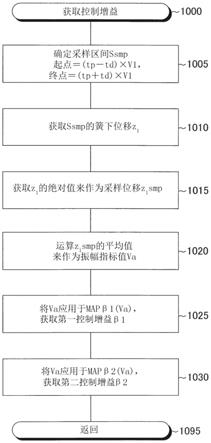
当进入图9所示的步骤915时,cpu从步骤1000开始图10中由流程图示出的控制增益获取例程的处理,执行步骤1005至步骤1030,进入步骤1095而暂时结束本例程,并进入图9所示的步骤920。
[0144]
步骤1005:cpu确定包含在从当前时刻起经过了预读时间(tpf,tpr)的时间点各车
轮11将会通过的通过预测位置的采样区间ssmp。更详细而言,cpu将从各车轮11的当前位置沿各移动预测行进路径行进了后述的第一距离l1后的地点确定为采样区间ssmp的起点。而且,cpu将从各车轮的当前位置沿各移动预测行进路径行进了后述的第二距离l2后的地点确定为采样区间ssmp的终点。
[0145]
需要说明的是,cpu基于以下的算式(9)来运算第一距离l1,并基于以下的算式(10)来运算第二距离l2。
[0146]
l1=(tp-td)
×
v1
……
(9)
[0147]
l2=(tp+td)
×
v1
……
(10)
[0148]
算式(9)和算式(10)中的“td”意思是指规定时间。
[0149]
步骤1010:cpu从事先从云40的预见参照数据45获取到的“准备区间中的簧下位移z
1”获取与对应于采样区间ssmp所包含的位置的位置信息相关联的簧下位移z1。
[0150]
步骤1015:cpu运算上述采样区间ssmp的簧下位移z1的绝对值来作为采样位移z1smp。
[0151]
步骤1020:cpu对上述采样位移z1smp执行低通滤波处理,并运算所述低通滤波处理的执行后的采样位移z1smp的平均值来作为振幅指标值va。需要说明的是,低通滤波处理是用于仅使规定的截止频率以下的频带通过的处理。
[0152]
步骤1025:cpu将振幅指标值va应用于第一控制增益映射图mapβ1(va),由此获取前轮第一控制增益β1f和后轮第一控制增益β1r。
[0153]
步骤1030:cpu将振幅指标值va应用于第二控制增益映射图mapβ2(va),由此获取前轮第二控制增益β2f和后轮第二控制增益β2r。
[0154]
如图7和图8所示,第一控制增益映射图mapβ1(va)和第二控制增益映射图β2(va)分别被规定为:由振幅指标值va表示的振幅越小(即,振幅指标值va越小),第一控制增益β1和第二控制增益β2越大。因此,第一控制增益β1和第二控制增益β2被决定为由振幅指标值va表示的采样位移z1smp的振幅越小则越大的值。由此,即使上述振幅变小,对应于与通过预测位置处的簧下位移z1关联的值的悬架力的分量变大,也会运算出适当的目标控制力fct。因此,即使在上述振幅小的情况下,也能适当地减小簧上51的振动。
[0155]
(第二实施方式)
[0156]
使用图11至图13对本发明的第二实施方式的减振控制装置20(以下,称为“第二装置”。)进行说明。
[0157]
由于主动致动器17的控制延迟,主动致动器17产生与目标控制力fct一致的控制力fc的产生定时可能会比车轮11从通过预测位置通过的通过定时延迟。在产生定时主动致动器17所产生的控制力fc相对于“基于所述产生定时的车轮11的位置的簧下位移z1运算的目标控制力fct”的差量(以下,称为“迟延控制力差量”。)越大,越无法对簧上51进行减振,进而,簧上51也可能会被加振。车辆10所行驶的路面的路面位移z0的频率越高,上述迟延控制力差量变大的可能性越高,因此,簧上51被大幅加振的可能性也越高。
[0158]
第二装置的ecu30基于车辆10以当前时间点的车速v1在采样区间行驶的情况下的采样位移z1smp的时序变化(即,采样区间的路面位移z0的时序变化),提取第一频带(低频带)的采样位移z1smp和第二频带(高频带)的采样位移z1smp。然后,ecu30基于第一频带的采样位移z1smp,运算表示第一频带中的采样位移z1smp的振幅的大小的第一振幅指标值va1。
同样地,ecu30基于第二频带的采样位移z1smp,运算表示第二频带中的采样位移z1smp的振幅的大小的第二振幅指标值va2。
[0159]
接着,ecu30将第一振幅指标值va1和第二振幅指标值va2应用于图11所示的第一控制增益映射图mapβ1(va1,va2),由此获取前轮第一控制增益β1f和后轮第一控制增益β1r。而且,ecu30将第一振幅指标值va1和第二振幅指标值va2应用于图12所示的第二控制增益映射图mapβ2(va1,va2),由此获取前轮第二控制增益β2f和后轮第二控制增益β2r。
[0160]
图11所示的第一控制增益映射图mapβ1(va1,va2)和图12所示的第二控制增益映射图mapβ2(va1,va2)预先存储在ecu30的rom中。如图11所示,第一控制增益映射图mapβ1(va1,va2)规定第一振幅指标值va1和第二振幅指标值va2与第一控制增益β1(前轮第一控制增益β1f和后轮第一控制增益β1r)的关系。根据第一控制增益映射图mapβ1(va1,va2),第一控制增益β1的值被规定为:第一振幅指标值va1越小则第一控制增益β1的值越大(换言之,第一振幅指标值va1越大则第一控制增益β1的值越小),第二振幅指标值va2越小则第一控制增益β1的值越大(换言之,第二振幅指标值va2越大则第一控制增益β1的值越小)。
[0161]
更具体而言,根据第一控制增益映射图mapβ1(va1,va2),由第二振幅指标值va2的减小引起的第一控制增益β1的增加量(β1f:1.1
→
1.3,1.0
→
1.2β1r:1.1
→
1.3,1.0
→
1.2)被规定为大于由第一振幅指标值va1的减小引起的第一控制增益β1的增加量(β1f:1.2
→
1.3,1.0
→
1.1β1r:1.2
→
1.3,1.0
→
1.1)。需要说明的是,第一控制增益β1f和第一控制增益β1r也可以被设定为不同的值。
[0162]
如图12所示,第二控制增益映射图mapβ2(va1,va2)规定第一振幅指标值va1和第二振幅指标值va2与第二控制增益β2(前轮第二控制增益β2f和后轮第二控制增益β2r)的关系。根据第二控制增益映射图mapβ2(va1,va2),第二控制增益β2的值被规定为:第一振幅指标值va1越小则第二控制增益β2的值越大(换言之,第一振幅指标值va1越大则第二控制增益β2的值越小),第二振幅指标值va2越小则第二控制增益β2的值越大(换言之,第二振幅指标值va2越大则第二控制增益β2的值越小)。
[0163]
更具体而言,根据第二控制增益映射图mapβ2(va1,va2),由第二振幅指标值va2的减小引起的第二控制增益β2的增加量(β2f:1.1
→
1.3,1.0
→
1.2β2r:1.2
→
1.3,1.0
→
1.2)被规定为大于由第一振幅指标值va1的减小引起的第二控制增益β2的增加量(β2f:1.2
→
1.3,1.0
→
1.1β2r:1.1
→
1.3,1.0
→
1.1)。需要说明的是,第二控制增益β2f和第二控制增益β2r也可以被设定为不同的值。而且,第一控制增益β1f和第二控制增益β2f也可以被设定为不同的值,第一控制增益β1r和第二控制增益β2r也可以被设定为不同的值。
[0164]
根据以上记载,当在采样区间ssmp中高频带的采样位移z1smp的振幅变大的情况下,第一控制增益β1和第二控制增益β2变得更小。由此,在采样位移z1smp的频率变高并且迟延控制力差量变大的可能性变高的情况下,第一控制增益β1和第二控制增益β2变得更小,因此运算出更小的目标控制力fct,从而迟延控制力差变小。因此,即使产生定时比通过定时延迟,也能降低簧上51被大幅加振的可能性。
[0165]
本实施方式的ecu30的cpu执行图13所示的控制增益获取例程来代替图10所示的控制增益获取例程。需要说明的是,在图13中,对于进行与图10所示的步骤相同的处理的步骤标注与图10中使用的附图标记相同的附图标记,并且省略说明。
[0166]
当进入图9所示的步骤915时,cpu从步骤1300开始图13中由流程图示出的控制增
益获取例程的处理,并执行步骤1005至步骤1015。
[0167]
之后,cpu执行步骤1305至步骤1330,并进入步骤1395而暂时结束本例程。
[0168]
步骤1305:cpu运算以当前时间点的车速v1在采样区间ssmp行驶的情况下的采样位移z1smp的时序变化。
[0169]
步骤1310:cpu从上述时序变化提取第一频带的采样位移z1smp(第一采样位移z1smp)和第二频带的采样位移z1smp(第二采样位移z1smp)。
[0170]
更详细而言,cpu通过对上述时序变化执行“仅使第一频带通过的带通滤波处理”来获取第一采样位移z1smp。同样地,cpu通过对上述时序变化执行“仅使第二频带通过的带通滤波处理”来获取第二采样位移z1smp。需要说明的是,第二频带的最小频率被设定为第一频带的最大频率以上的值。
[0171]
步骤1315:cpu对上述第一采样位移z1smp执行低通滤波处理,并运算所述低通滤波处理执行后的第一采样位移z1smp的平均值来作为第一振幅指标值va1。需要说明的是,该低通滤波处理是与图10所示的步骤1020的低通滤波处理相同的处理。
[0172]
步骤1320:cpu对上述第二采样位移z1smp执行低通滤波处理,并运算所述低通滤波处理执行后的第二采样位移z1smp的平均值来作为第二振幅指标值va2。需要说明的是,该低通滤波处理是与图10所示的步骤1020的低通滤波处理相同的处理。
[0173]
步骤1325:cpu将第一振幅指标值va1和第二振幅指标值va2应用于第一控制增益映射图mapβ1(va1,va2),由此获取前轮第一控制增益β1f和后轮第一控制增益β1r。
[0174]
步骤1330:cpu将第一振幅指标值va1和第二振幅指标值va2应用于第二控制增益映射图mapβ2(va1,va2),由此获取前轮第二控制增益β2f和后轮第二控制增益β2r。
[0175]
由以上可以理解,在被预测为高频带的采样位移z1smp的振幅变大的情况下,以与被预测为低频带的采样位移z1smp的振幅变大的情况相比第一控制增益β1和第二控制增益β2的值变小的方式决定第一控制增益β1和第二控制增益β2的值,因此目标控制力fct变小。因此,在迟延控制力差量变大的可能性变高的情况下,能减小迟延控制力差。由此,即使产生定时比通过定时延迟,也能降低簧上51被加振的可能性。
[0176]
需要说明的是,第一控制增益映射图mapβ1(va1,va2)和第二控制增益映射图mapβ2(va1,va2)并非分别限定于图11和图12所示的例子。作为一个例子,也可以是,第一控制增益映射图mapβ1(va1,va2)和第二控制增益映射图mapβ2(va1,va2)分别被预先设定为:第一控制增益β1和第二控制增益β2与第一振幅指标值va1的减小成比例地增大,第一控制增益β1和第二控制增益β2与第二振幅指标值va2的减小成比例地增大。
[0177]
(第二实施方式的变形例)
[0178]
本变形例的ecu30运算“步骤1320中运算出的第二振幅指标值va2”与“步骤1315中运算出的第一振幅指标值va1”的比例rt。然后,ecu30将比例rt应用于图14所示的第一控制增益映射图mapβ1(rt),由此获取前轮第一控制增益β1f和后轮第一控制增益β1r。而且,ecu30将比例rt应用于图15所示的第二控制增益映射图mapβ2(rt),由此获取前轮第二控制增益β2f和后轮第二控制增益β2r。
[0179]
图14所示的第一控制增益映射图mapβ1(rt)和图15所示的第二控制增益映射图mapβ2(rt)预先存储在ecu30的rom中。如图14所示,第一控制增益映射图mapβ1(rt)规定比例rt与第一控制增益β1(前轮第一控制增益β1f和后轮第一控制增益β1r)的关系。根据第一
控制增益映射图mapβ1(rt),第一控制增益β1的值被规定为比例rt越大则第一控制增益β1的值越小。
[0180]
如图15所示,第二控制增益映射图mapβ2(rt)规定比例rt与第二控制增益β2(前轮第二控制增益β2f和后轮第二控制增益β2r)的关系。根据第二控制增益映射图mapβ2(rt),第二控制增益β2的值被规定为比例rt越大则第二控制增益β2的值越小。
[0181]
由此,以第二振幅指标值va2与第一振幅指标值va1的比例rt越大则第一控制增益β1和第二控制增益β2的值越小的方式决定第一控制增益β1和第二控制增益β2的值。因此,在被预测为高频带的采样位移z1smp的振幅变大的情况下,以与被预测为低频带的采样位移z1smp的振幅变大的情况相比第一控制增益β1和第二控制增益β2的值变得更小的方式决定第一控制增益β1和第二控制增益β2的值。因此,在迟延控制力差量变大的可能性变高的情况下,能减小迟延控制力差,从而能降低簧上51被大幅加振的可能性。
[0182]
本发明并不限定于上述实施方式和上述变形例,可以在本发明的范围内采用各种变形例。
[0183]
在上述实施方式以及上述变形例中,虽然说明了采样区间ssmp是包含车轮11的通过预测位置的区间,但采样区间ssmp也可以不包含上述通过预测位置。即,采样区间ssmp的终点也可以是比通过预测位置靠前的位置。需要说明的是,采样区间ssmp的起点也可以是车轮11的当前位置,还可以是比所述当前位置靠前的位置。
[0184]
预见参照数据45不需要存储于云40的存储装置44,也可以存储于存储装置30a。在该情况下,cpu基于在车辆10的行驶中各车轮11的簧上51或簧下50的上下方向的运动状态量来运算簧下位移z1,并将各车轮11的当前位置与该簧下位移z1相关联的数据的集合存储于预见参照数据45即可。需要说明的是,对簧下位移z1的求法省略说明。
[0185]
而且,在预先决定了车辆10的行驶行进路径的情况下,cpu可以在车辆10开始行进路径的行驶之前预先从云40下载所述行驶路径的预见参照数据45,并存储于存储装置30a。
[0186]
也可以是,代替簧下位移z1而将簧下速度dz1与位置信息相关联并存储于预见参照数据45。在该情况下,cpu在图9所示的步骤920中获取通过预测位置的簧下速度dz1,并在步骤925中对簧下速度dz1进行积分,由此运算簧下位移z1。而且,cpu在图10所示的步骤1010中获取采样区间ssmp的簧下速度dz1并且对该簧下速度dz1进行积分,由此运算采样区间ssmp的簧下位移z1。
[0187]
而且,也可以将簧下位移z1和簧下速度dz1与位置信息相关联而存储于预见参照数据45。
[0188]
而且,目标控制力fct(前轮目标控制力fcft和后轮目标控制力fcrt)可以基于从上述算式(7)和算式(8)中分别省略了微分项(β1f
×
dz1)和微分项(β1r
×
dz1)的以下的算式(11)和算式(12)来运算出。即使在该情况下,也从致动器54产生抵消弹簧力的与通过预测位置的簧下位移z1相当的分量(k
×
z1)的方向的控制力fc(=β2
×
z1),因此,与不产生控制力fc的情况相比,能对簧上51进行减振。
[0189]
fcft=β2f
×
z1……
(11)
[0190]
fcrt=β2r
×
z1……
(12)
[0191]
需要说明的是,在该情况下,将第二控制增益映射图预先存储于ecu的rom即可。
[0192]
而且,目标控制力fct(前轮目标控制力fcft和后轮目标控制力fcrt)也可以基于
从上述算式(7)和算式(8)中分别省略了位移项(β2f
×
z1)和位移项(β2r
×
z1)的以下的算式(13)和算式(14)来运算出。即使在该情况下,也从致动器54产生抵消阻尼力的与通过预测位置的簧下速度dz1相当的分量(c
×
dz1)的方向的控制力fc(=β1
×
dz1),因此,与不产生控制力fc的情况相比,能对簧上51进行减振。
[0193]
fcft=β1f
×
dz1……
(13)
[0194]
fcrt=β1r
×
dz1……
(14)
[0195]
需要说明的是,在该情况下,将第一控制增益映射图预先存储于ecu的rom即可。
[0196]
而且,也可以是,代替簧下位移z1而使用路面位移z0,代替簧下速度dz1而使用作为路面位移z0的时间微分值的路面位移速度dz0,运算目标控制力fct。在该情况下,也可以是,代替簧下位移z1而将路面位移z0与位置信息相关联并存储于预见参照数据45,ecu30从预见参照数据45获取通过预测位置的路面位移z0。而且,也可以是,ecu30从由上述的预见传感器33获取到的路面位移z0获取通过预测位置的路面位移z0。
[0197]
在此,对预见传感器33进行说明。预见传感器33例如装配于车辆10的前窗玻璃的车宽度方向中央的上端部的内表面,检测(获取)与前轮11f相距预见距离的前方的目标位置及其周边的路面位移z0。需要说明的是,优选的是,预见距离大于车辆10的车速v1为额定的最高车速时的前轮预读距离lpf。此外,在图2中,仅图示出了一个预见传感器33,但也可以设置与左右的前轮对应的一对预见传感器。
[0198]
作为与用于目标控制力fct的运算的路面位移z0关联的值的“簧下位移z1和/或簧下速度dz1以及路面位移z0和/或路面位移速度dz
0”有时也被称为“路面位移关联值”。
[0199]
在图10所示的步骤1025中,也可以是,cpu对采样位移z1smp实施快速傅里叶变换,运算各频带的频率分量的移动平均来作为振幅指标值va。
[0200]
而且,在第二实施方式中,代替步骤1310至步骤1320而执行以下的处理。cpu对采样位移z1smp的时序变化实施快速傅里叶变换,运算第一频带所包含的频带的频率分量的移动平均来作为第一振幅指标值。而且,运算第二频带所包含的频带的频率分量的移动平均来作为第二振幅指标值。
[0201]
后轮11r的目标控制力fcrt的运算处理并不限定于上述例子。例如,也可以是,cpu基于在当前时刻tp前轮11f的当前位置的簧下位移z1来运算目标控制力fcrt,在从当前时刻tp起延迟时间(l/v-tpr)的定时将包含所述目标控制力fcrt的控制指令发送至后轮主动致动器17r。即,也可以是,cpu在后轮11r到达比前轮11f的当前位置提前后轮预读距离lpr的地点的定时将包含目标控制力fcrt的控制指令发送至后轮主动致动器17r。需要说明的是,前轮11f的当前位置的簧下位移z1可以从预见参照数据45获取,也可以基于与前轮11f的位置对应的簧上加速度ddz2或簧下加速度ddz1来获取。
[0202]
而且,在以下对其他方法进行说明。cpu与前轮移动预测行进路径独立地,基于后轮11r的当前位置、车辆10的行进方向td以及位置关系数据来确定后轮移动预测行进路径,将沿后轮移动预测行进路径离开后轮预读距离lpr的位置确定为后轮通过预测位置。然后,cpu从预见参照数据45获取后轮通过预测位置的簧下位移z1,基于获取到的簧下位移z1来运算后轮11r的目标控制力fcrt。
[0203]
车速v1和行进方向td基于gnss接收器获取到的车辆10的当前位置来获取,但并不限定于此。例如,也可以是,减振控制装置20具备未图示的“车轮速度传感器和转向角传感
器”,车轮速度传感器检测车轮11的转速,cpu基于车轮11的转速来运算车速v1。也可以是,设置检测车辆10的横摆角速度的横摆角速度传感器,cpu基于横摆角速度和车速v1来获取行进方向td。
[0204]
只要容许各个车轮11fr至11rl和车身10a相互相对于对方在上下方向进行位移即可,悬架13fr至13rl可以是任何类型的悬架。而且,悬架弹簧16fr至16rl可以是压缩螺旋弹簧、空气弹簧等任意的弹簧。
[0205]
在上述实施方式中,与各车轮11对应地设置主动致动器17fr至17rl,但在至少一个车轮11设置一个主动致动器17即可。例如,车辆10可以仅具备前轮主动致动器17f和后轮主动致动器17r中的任一方。
[0206]
在上述实施方式和上述变形例中,使用主动致动器17作为控制力产生装置,但并不限定于此。即,控制力产生装置是能基于包含目标控制力的控制指令可调整地产生用于对簧上51进行减振的上下方向的控制力的致动器即可。
[0207]
而且,控制力产生装置也可以是主动稳定装置(未图示)。主动稳定装置包括前轮主动稳定器和后轮主动稳定器。当在与左前轮11fl对应的簧上51和簧下50之间产生上下方向的控制力(左前轮控制力)时,前轮主动稳定器在与右前轮11fr对应的簧上51和簧下50之间产生与左前轮控制力反方向的控制力(右前轮控制力)。同样地,当在与左后轮11rl对应的簧上51和簧下50之间产生上下方向的控制力(左后轮控制力)时,后轮主动稳定器在与右后轮11rr对应的簧上51和簧下50之间产生与左后轮控制力反方向的控制力(右后轮控制力)。上述主动稳定装置的构成通过参照日本特开2009-96366而引入本技术说明书中。需要说明的是,主动稳定装置包括前轮主动稳定器和后轮主动稳定器中的至少一方即可。
[0208]
控制力产生装置也可以是通过对车辆10的各车轮11增减制动驱动力而利用悬架13fr至13rl的几何形状来产生上下方向的控制力fc的装置。像这样的装置的构成通过参照日本特开2016-107778等而引入本技术说明书中。ecu30通过规定的方法,运算出产生与目标控制力fct对应的控制力fc的制动驱动力。而且,像这样的装置包括向各车轮11赋予驱动力的驱动装置(例如,轮内马达)和向各车轮11赋予制动力的制动装置(制动器装置)。需要说明的是,驱动装置可以是向前轮和后轮中的任一方或四轮赋予驱动力的马达或发动机等。而且,上述控制力产生装置包括驱动装置和制动装置中的至少一方即可。
[0209]
而且,控制力产生装置也可以是阻尼力可变式的减震器15fr至15rl。在该情况下,ecu30以减震器15fr至15rl的阻尼力变化与目标控制力fct对应的值的方式控制减震器15fr至15rl的阻尼系数c。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1