1.本发明涉及一种用于尤其在车辆的动力传动系中操纵切换元件的方法。切换元件是力配合的切换元件,例如是离合器或制动器。在此,通过离合器可以建立或解除动力传动系的两个可旋转的构件之间的防旋转的力配合的连接。与此类似地,制动器描述了如下切换元件,借助于该切换元件能够建立或解除可旋转的构件与固定的构件之间的力配合的连接。相应的切换元件尤其可以用作行驶方向离合器和/或行驶范围离合器。在此,借助行驶方向离合器实现车辆的向前行驶运行与(与之相反的)向后行驶运行或者驱动之间的变换。相比之下,借助行驶范围离合器能够以变速器的彼此不同的传动比来实现不同的挡位或行驶范围。
背景技术:2.从现有技术已知这样的方法,即,其在存在限定标准的情况下建立变速器或动力传动系的安全状态,以防止切换元件的转矩传递达到不期望的程度。因此,de 199 26 697 b4公开了一种类似的方法,在该方法中,即使例如在控制单元中或在给用于操纵离合器的液压阀通电时出现故障,也防止车辆开动。为此,如果自车辆的静止状态起车辆的行车制动器或驻车制动器已经不间断地操纵了预先确定的时间段,则切换到空挡状态并且使离合器闭合。
技术实现要素:3.本发明的目的在于,提供一种用于运行动力传动系的经改进的方法,该方法在没有明确地预先给定行驶的情况下阻止起动过程。
4.该目的通过根据本发明的方法来实现。在此,车辆首先处于静止状态,其中存在行驶方向预先给定。这应理解为,已经预先选择或确定了应沿其进行将来的起动过程的行驶方向。这可以由操作员或者在自主车辆中由相应的控制装置来进行。通过预先给定行驶方向还限定了在起动过程中应闭合(向前/向后)行驶方向切换元件中的哪个行驶方向切换元件。
5.车辆例如是机动车辆,尤其是商用车辆或作业机械。在此,车辆具有带有驱动元件(例如燃烧动力发动机)的动力传动系,该驱动元件与变速器处于操作性连接。通过驱动元件将旋转运动或转矩导入变速器中,与所选择的挡位级或行驶范围对应地进行变速并引导到从动装置上。该从动装置例如可以与车辆的驱动车轮处于操作性连接,以便驱动这些驱动车轮。
6.没有明确的行驶要求的起动过程例如可以理解为,(有时部分地)闭合相关的行驶方向切换元件,而不存在呈操纵加速踏板形式的行驶要求。这可能由此引起的是,由于控制装置故障、控制装置中的某个构件的缺陷、软件故障或由于其他表现(例如由于其他装置-emv引起的不期望的电气干扰或电磁干扰)而为操纵比例阀以操控相关的切换元件提供错误电流。也可能存在例如呈导致操纵比例阀的短路形式的电气故障。
7.根据本发明,如果累积地满足相应的激活标准,则将动力传动系转变到安全状态。安全状态例如可以通过如下方式建立,即,除了行驶方向切换元件外还断开用于设定行驶范围或挡位级的一个或所有切换元件。只要技术上可行,就可以将变速器置于空挡位置。替代性地或补充地,还可以激活驻车制动器和/或行车制动器、关断驱动元件并且/或者光学地和/或声学地向操作员输出指示。当为设定行驶范围或挡位级所需的切换元件处于闭合状态时,满足第一激活标准。根据变速器的实施方式还可以提出的是,多个切换元件同时为了设定行驶范围或挡位级而处于闭合状态。因此,这将被列入第一激活标准。
8.第二激活标准表示超过行驶方向切换元件的转速差的阈值。在此,转速差应被理解为离合器半部在断开状态下相对于彼此形成的差值。低于车辆速度的阈值表示第三激活标准。这基于如下原因,即,如果已经达到或超过限定的车辆速度,则不能再假设没有明确地预先给定行驶的起动过程。第四激活标准表示用于行驶方向离合器的特定信号。在此,特定信号例如可以是行驶方向切换元件存在电气故障或者恰好这个行驶方向切换元件的操控信号发生不允许的电流变化。原则上,这些特征也可以相互组合成第四激活标准。此外,还可以使用另外的激活标准、例如动力传动系中另外的切换元件的操纵状态、马达信号等作为激活标准。
9.电流变化的不允许性要么由其数值、梯度、持续时间得出,要么由其在时间间隔内的次数得出。也可以以数值、梯度、持续时间和次数的组合得到电流变化的不允许性。因此,对于所述电流变化的数值、梯度、持续时间和次数分别预先给定绝对阈值和/或动态阈值。绝对阈值应理解为,该绝对阈值对于各个参数(电流变化的数值、梯度、持续时间、次数)本身预先给定最大值。动态阈值相应地应理解为,对于这些参数中的一个参数的阈值可以根据其余参数改变,尤其是可以偏离绝对阈值。此外,也可以限定极限值,低于这些极限值的电流变化将不予考虑。尤其,这样的电流变化应被理解为其不适合用于在没有明确行驶要求的情况下启动车辆的起动过程。
10.根据本发明的另一方面,周期性地检测所述电流变化的实际值、即参数的实际值并且将所述实际值与所述绝对阈值和/或动态阈值进行比较。在此,为了评估电流变化的不允许性,要考虑的周期次数能够根据阈值或参数而变化。这应理解为,观察例如5个周期上的梯度变化并且以该梯度变化为基础,而对于电流变化的次数考虑10个周期。
11.在有利的改进方案中,以可参数化的综合特性曲线的形式来预先给定所述绝对阈值和/或动态阈值。这应理解为,可以实现使综合特性曲线与相应的车辆、使用条件、法律规定或操作员的个人偏好相适配。也可以考虑动力传动系中的构件的磨损。综合特性曲线在此可实施成二维或多维的。通过车辆的操作员本身借助于适合的接口或输入装置或者由现场、车间或通过远程维护的服务人员藉由诊断接口进行参数化。因此也可以实施更新。
12.根据本发明的另一方面,本发明还包括一种具有计算单元、输入接口和输出接口的控制装置。除了行驶方向预先给定和行驶要求外,通过输入接口也将激活标准的存在传输给计算单元或通知给该计算单元。所述计算单元适用于并且被适配成用于实施根据本发明的方法并且藉由所述输出接口输出信号,由此将所述动力传动系转变到安全状态。
13.此外,本发明包括一种具有上述类型的控制装置和动力传动系的车辆,其中所述动力传动系包括驱动元件、变速器和从动装置。
附图说明
14.借助于以下附图进一步阐述本发明。在附图中:
15.图1:示出方法逻辑的示意图,
16.图2:示出电流曲线的第一示意图,
17.图3:示出电流曲线的第二示意图,
18.图4:示出可参数化的综合特性曲线的示意图。
具体实施方式
19.图1以大幅度简化的方式示出根据本发明的方法或者输入信号的处理,以实现动力传动系的、尤其是车辆的变速器的安全状态。在此,将激活标准1、2、3、4的信号信息输送给计算单元r,该计算单元按照根据本发明的方法处理这些信号信息。
20.当车辆处于静止状态时使用该方法,其中预先给定行驶方向。因此已经输入了车辆是否应在起动过程期间沿向前或向后行驶方向加速。然而,行驶方向切换元件仍处于断开状态。此外,还存在在行驶范围或挡位级方面进行预先给定。这要么可以通过操作员命令,要么可以通过变速器的相应的换挡程序或车辆控制计算机来预先给定。因此,为设定所选择的挡位级所需的切换元件处于闭合状态。这表示第一激活标准1。根据变速器的实施方式,为了设定挡位级或行驶范围而需要闭合一个或多个切换元件。
21.此外,预先给定了关于要闭合的行驶方向切换元件的转速差的阈值。该阈值可以存储在计算单元中或者存储在单独的控制器或其他存储元件中。超过转速差的该阈值表示第二激活标准2。此外,预先给定了关于车辆速度的阈值,其中低于该阈值表示第三激活标准3。此外,第四激活标准4被设置为计算单元r的输入变量或者信号输入。第四激活标准以相关行驶方向切换元件的特定信号的形式存在。在此,例如可以涉及电气故障或不允许的电流变化α的说明。在计算单元r中进行关于激活标准1、2、3、4的存在的比较。如果是这种情况,则输出信号s,由此将车辆的动力传动系或者动力传动系的变速器转变到安全状态。换言之,根据逻辑与关系来处理激活标准1、2、3、4的存在。
22.图2示出用于操控切换元件(例如行驶方向切换元件)的比例阀的电流曲线的大幅度简化的第一示意图。在横坐标上示出时间曲线t,在纵坐标上示出电流i。在时间点t0开始,电流i具有值i0或者以小的数值围绕该值波动直至时间点t1。尤其,电流i的值在上述间隔期间向下偏离值i0并且不超过该值。例如值i0代表电流i,低于该电流则没有足够的转矩通过相关的切换元件传递,从而这不会导致起动过程或车辆运动。
23.在时间点t1附近,电流i突然以高梯度上升,其中在时间点t1处,达到或者即将超过值i0。大幅的电流升高一直持续到时间点t2,其中随后达到值i1。在时间点t2和t3之间,电流i以大的负梯度下降,其中在时间点t3处达到值i0并且之后甚至明显低于该值。短暂的、但强烈的电流升高是可允许的走向,因为这可能导致动力传动系的突然的转矩传递,该突然的转矩传递一方面能够由控制器识别并且能够启动相应的应对措施。此外,操作员能够感知到突然的起动过程,从而可以由其立即采取适合的措施。由此可以检测行车制动器和/或驻车制动器的操纵。相应地,在图2中描述的电流变化可以被分类为允许的电流变化β。
24.如之前已经在图2中所展示的,图3示出电流曲线的大幅度简化的第二示意图。然
而,电流i的曲线是不同的。从时间点t0开始直至时间点t1,电流i具有值i0或者以小的数值围绕该值波动。在时间点t1处,电流i持续上升,直至该电流在时间点t2具有值i1。因此,在t1与t2之间发生恒定的电流升高,其中梯度明显小于图2中的图示。这可能导致相关的切换元件的恒定的、然而几乎不可察觉的闭合,从而没有预先给定行驶的起动过程有时会较差地或者较晚地被识别出。以相同的方式,该图示也可以描绘相关切换元件的恒定闭合,该恒定闭合导致车辆的长时间持续的强烈加速。因为这两者都要避免,所以在此所示出的电流变化可以分类为不允许的电流变化α。如果出现该过程,则将该信息作为第四激活标准4输送给计算装置r。因此,可以触发用于建立安全状态的信号s或者使变速器或动力传动系转变到安全状态。
25.应指出的是,在图2和图3中的时间曲线t的标度不是按比例的,从而图2中的t1与t2之间的增量可以具有与图3中的t1与t2之间的增量不同的值。
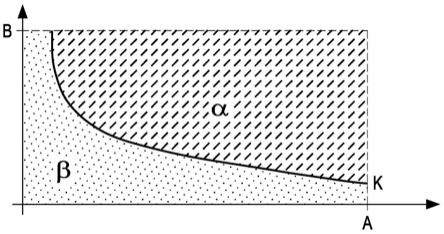
26.图4示出可参数化的综合特性曲线的示意图。该综合特性曲线在此实施成二维的。在这里所示出的曲线图中,在横坐标上绘出了电流变化的频率a,并且在纵坐标上绘出了电流变化的特征值b。特性曲线k将展开的区域划分为不允许的电流变化α和允许的电流变化β。在此,不允许的电流变化α用阴影示出并且允许的电流变化β点状地示出。因此,根据图2的允许的电流变化β指配给特性曲线k下方的区域,而根据图3的不允许的电流变化α指配给特性曲线k上方的区域。
27.电流变化的特征值b尤其可以以电流i的所达到的值(数值)、电流变化的梯度或电流变化的持续时间或电流i的所达到的值来表示。换言之,允许的电流变化β与小的频次a和高的特征值b相关联,而不允许的电流变化α与高的频次a和低的特征值b相关联。由于综合特性曲线是可参数化的,所以可以以先前所述的方式对综合特性曲线进行适配。因此,这导致特性曲线k的变化的走向。
28.附图标记清单
29.a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
频率
30.b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
特征值
31.1,2,3,4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
激活标准
32.i,i0,i1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电流
33.k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
特性曲线
34.r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
计算单元
35.s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
安全状态信号
36.t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
时间曲线
37.t0,t1,t2,t3
ꢀꢀꢀꢀꢀꢀ
时间点
38.α
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
不允许的电流变化
39.β
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
允许的电流变化