用于运行操纵装置的泵马达的方法以及操纵装置、机动车与流程
1.本发明涉及一种用于运行制动设备的操纵装置的泵马达的方法,其中,所述操纵装置具有泵马达、拥有至少一个能电操纵的开关阀的阀装置、能够与泵马达电连接的电的第一供应端子和能够与阀装置电连接的电的第二供应端子,其中,预先给定用于泵马达的额定运行电流,并且其中,泵马达与第一供应端子电连接,从而额定运行电流至少按份额通过第一供应端子来提供。
2.此外,本发明涉及一种用于制动设备的操纵装置,其具有控制设备。
3.此外,本发明涉及一种机动车,该机动车具有拥有这种操纵装置的制动设备。
背景技术:
4.开头所述类型的操纵装置是已知的。例如,申请人的“集成动力制动”(ipm)是这样的操纵装置。
5.操纵装置具有泵马达。泵马达具有可旋转地支承的转子。例如,转子抗扭转地布置在轴上,其中,该轴可旋转地支承在操纵装置的壳体中。此外,泵马达具有尤其多相的马达绕组。例如,马达绕组是泵马达的固定在壳体上的定子的一部分并且如此分布地围绕转子布置,使得转子能通过对马达绕组或定子绕组的适当通电而旋转。泵马达被构造用于通过转子或轴的旋转来操纵所述操纵装置的泵元件。如果操纵装置是制动设备的一部分,那么通过操纵泵元件将液压液体输送到制动设备的摩擦制动装置的从动缸中,从而通过操纵泵元件来产生减速力矩。
6.此外,所述操纵装置具有拥有至少一个能够电操纵的开关阀的阀装置。例如,开关阀是电磁阀。优选地,阀装置具有多个可电操纵的开关阀。开关阀布置在操纵装置的流体线路中,从而为了控制制动过程,流体线路的穿流横截面可以通过开关阀选择性地被截止或释放。
7.此外,操纵装置具有电的第一供应端子,该电的第一供应端子能够与泵马达电连接。因此,借助第一供应端子可以提供用于运行泵马达的电能。此外,操纵装置具有电的第二供应端子,其能够与阀装置电连接。因此,借助第二供应端子可以提供用于切换所述开关阀的电能。
8.如果泵元件将由泵马达操纵,则预先给定用于泵马达的电的额定运行电流。泵马达然后与第一供应端子电连接,从而额定运行电流至少按份额(anteilig)通过第一供应端子来提供。根据用于运行泵马达的已知的方法,额定运行电流完全地或仅通过第一供应端子来提供。
技术实现要素:
9.具有权利要求1的特征的根据本发明的方法的特征在于,泵马达与第二供应端子电连接,从而至少按份额通过第二供应端子来提供额定运行电流。额定运行电流因此按份额通过第一供应端子来提供并且按份额通过第二供应端子来提供。如果操纵装置是机动车
的制动设备的一部分,则第一供应端子借助电的第一供应线路与机动车的电压源电连接。第二供应端子借助电的第二供应线路与机动车的电压源电连接。因为根据本发明,额定运行电流至少按份额通过第二供应端子来提供,所以与已知的方法相比,较小的电流流经第一供应线路,由此减小了第一供应线路的热负荷。因此,第一供应线路可以更薄地并且因此成本更低地设计。
10.根据一种优选的实施方式规定,泵马达仅当额定运行电流超过预先给定的电流阈值时才与第二供应端子电连接。由此假定,当额定运行电流低于电流阈值时,第一供应线路的热负荷是可接受的。相应地,于是不需要通过第二供应端子来按份额提供额定运行电流。如果仅仅第一供应端子用于提供额定运行电流,则额定运行电流在方法技术上可更简单地予以提供。
11.优选地,当第二供应端子与泵马达电连接时,第一供应端子与泵马达电分离。也就是说,从第一供应端子切换到第二供应端子上。优选地,当第一供应端子与泵马达电连接时,第二供应端子相应地与泵马达电分离。也就是说,从第二供应端子切换到第一供应端子上。因为分别仅供应端子之一与泵马达电连接,所以额定运行电流在特定的时刻分别仅通过供应端子之一来提供。然而,如果观察足够长的时间段,那么供应端子基于在供应端子之间的切换分别按份额提供额定运行电流。
12.根据一种优选的实施方式规定,操纵装置具有如下开关装置,该开关装置具有第一半导体开关和第二半导体开关,其中,第一和第二半导体开关布置在第一电线路中,泵马达通过该第一电线路与第一供应端子连接/能够连接,其中,给第一半导体开关配设有在运行电流的流动方向上截止的第一二极管,其中,给第二半导体开关配设有在运行电流的流动方向上导通的第二二极管,并且其中,为了将第一供应端子与泵马达分离,仅将第一半导体开关切换为非导通。因此,当第二供应端子与泵马达电连接时,仅将第一半导体开关切换为非导通。通过如上所述构造的开关装置,一方面第一供应端子和泵马达的可靠的连接或分离是可行的。因为仅将第一半导体开关切换为非导通,所以避免了在从第一供应端子切换到第二供应端子上时在提供运行电流方面产生供应间隙。
13.根据一种优选的实施方式规定,开关装置具有第三半导体开关和第四半导体开关,其中,第三和第四半导体开关布置在第二电线路中,泵马达通过该第二电线路与第二供应端子电连接/能够电连接,其中,给第三半导体开关配设有在运行电流的流动方向上截止的第三二极管,其中,给第四半导体开关配设有在运行电流的流动方向上导通的第四二极管,并且其中,为了将第二供应端子与泵马达分离,仅将第三半导体开关切换为非导通。因此,当第一供应端子与泵马达电连接时,仅将第三半导体开关切换为非导通。通过如上所述构造的开关装置,一方面第二供应端子与泵马达的可靠连接或分离是可行的。因为仅第三半导体开关切换为非导通,所以避免了在从第二供应端子切换到第一供应端子时在提供运行电流方面产生供应间隙。
14.优选地,通过第一供应端子来提供额定运行电流的如下份额,该份额不同于额定运行电流的通过第二供应端子来提供的份额。优选地,第一半导体开关为此以与第三半导体开关不同的占空度来操控。替代地,通过第一供应端子来提供额定运行电流的如下份额,该份额相应于额定运行电流的通过第二供应端子来提供的份额。
15.用于制动设备的根据本发明的操纵装置具有泵马达、拥有至少一个可电操纵的开
关阀的阀装置、能够与泵马达电连接的电的第一供应端子、能够与阀装置电连接的电的第二供应端子和拥有多个开关的开关装置,并且以权利要求7的特征通过控制设备来表征,该控制设备专门设立用于通过操控开关装置来执行根据本发明的方法。由此也得到已经提到的优点。其它优选的特征和特征组合由之前的说明以及由权利要求得出。优选地,操纵装置具有壳体,其中,泵马达、阀装置、第一供应端子、第二供应端子和开关装置关于该壳体以与壳体固定的方式来布置。操纵装置的元件于是可以作为共同的模块简单地相互操作。
16.根据一种优选的实施方式规定,开关装置具有第一电线路,第一供应端子和泵马达通过该第一电线路电连接/能够电连接,其中,第一线路具有第一半导体开关和第二半导体开关,其中,给第一半导体开关配设有在运行电流的流动方向上截止的第一二极管,并且其中,给第二半导体开关配设有在运行电流的流动方向上导通的第二二极管。如上所述,通过如此构造的开关装置,在提供运行电流方面可以在从第一供应端子切换到第二供应端子上时有利地避免供应间隙。
17.根据一种优选的实施方式规定,开关装置具有第二电线路,第二供应端子和泵马达通过该第二电线路电连接/能够电连接,其中,第二线路具有第三半导体开关和第四半导体开关,其中,给第三半导体开关配设有在运行电流的流动方向上截止的第三二极管,并且其中,给第四半导体开关配设有在运行电流的流动方向上导通的第四二极管。如上所述,通过如此构造的开关装置,在提供运行电流方面可以在从第二供应端子切换到第一供应端子上时有利地避免供应间隙。
18.优选地,第二线路在一方面第一和第二半导体开关和另一方面泵马达之间与第一线路连接。第二线路因此借助第一线路与泵马达电连接。由此实现泵马达不仅到第一供应端子上而且到第二供应端子上的技术上简单的连接。
19.根据一种优选的实施方式规定,开关装置具有第三电线路,通过该第三电线路,第二供应端子和阀装置电连接/可电连接,其中,第三线路具有第五半导体开关。因此,通过开关装置也可以选择性地建立或中断在第二供应端子与阀装置之间的电连接。
20.优选地,第二线路在一方面第五半导体开关与另一方面阀装置之间与第三线路连接。第二线路因此借助第三线路与第二供应端子电连接。由此实现第二线路到第二供应端子上的技术上简单的连接。
21.优选地,操纵装置具有第一电容器,该第一电容器在一方面第一半导体开关和第二半导体开关和另一方面第一供应端子之间与第一线路电连接。由此,在执行用于运行泵马达的方法时减小了与第一供应端子电连接的电压源的负荷。
22.优选地,操纵装置具有第二电容器,该第二电容器在一方面第五半导体开关和另一方面第二供应端子之间与第二线路电连接。由此,在执行用于运行泵马达的方法时减小了与第二供应端子电连接的电压源的负荷。
23.具有权利要求15的特征的根据本发明的机动车具有拥有根据本发明的操纵装置的制动设备,其中第一和第二供应端子与机动车的同一电压源电连接,或者其中第一供应端子与机动车的与第二供应端子不同的电压源电连接。由此也得到已经提到的优点。其它优选的特征和特征组合由之前的说明以及由权利要求得出。
附图说明
24.下面借助附图对本发明进行详细解释。为此示出:图1示出了制动设备的操纵装置,并且图2示出了用于运行操纵装置的泵马达的方法。
具体实施方式
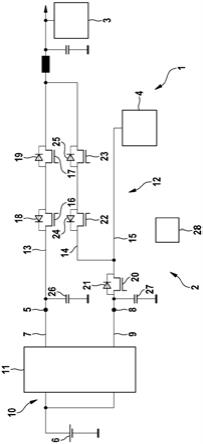
25.图1以示意图示出了操纵装置1。操纵装置1是机动车2的制动设备的一部分。
26.操纵装置1具有在图1中简化地示出的泵马达3。泵马达3具有转子,所述转子抗扭转地布置在轴上,其中,所述轴能旋转地支承在操纵装置1的壳体中。此外,泵马达3具有一个与壳体固定的定子,该定子具有多相的定子绕组,该定子绕组如此分布地围绕转子布置,使得转子通过对定子绕组的适当通电可旋转。泵马达3构造成通过转子或轴的旋转来操纵操纵装置1的泵元件。通过操纵泵元件来将液压液输送到制动设备的摩擦制动装置的从动缸中,从而通过操纵泵元件产生摩擦制动力矩。
27.此外,操纵装置1具有阀装置4。阀装置4也在图1中仅简化地示出。阀装置4具有多个可电操纵的开关阀,所述开关阀布置在操纵装置1的流体线路中。为了控制制动过程,流体线路的穿流横截面可以通过操纵开关阀选择性地被截止或释放。
28.此外,操纵装置1具有电的第一供应端子5。第一供应端子5与机动车的电压源6电连接。为此,设置有如下电的第一供应线路7,该电的第一供应线路一方面与第一供应端子5连接并且另一方面与电压源6连接。
29.此外,操纵装置1具有电的第二供应端子8。第二供应端子8也与电压源6电连接。为此,设置有如下电的第二供应线路9,该电的第二供应线路一方面与第二供应端子8电连接并且另一方面与第一供应线路7电连接。
30.供应线路7和9是机动车的线缆束10的一部分。电子保险装置11配设给供应线路7和9。保险装置11被构造用于在短路的情况下截止通过第一供应线路7和/或第二供应线路9的电流流动。
31.电压源6在此是机动车的车载电网电池6。根据另一实施例,供应端子5和8与机动车的不同的电压源电连接。例如,于是第一供应线路7一方面与第一供应端子5连接并且另一方面与第一电压源连接,并且第二供应线路9一方面与第二供应端子8连接并且另一方面与第二电压源连接。
32.此外,操纵装置1具有开关装置12。开关装置12具有第一电线路13、第二电线路14和第三电线路15。
33.第一线路13一方面与第一供应端子5连接并且另一方面与泵马达3连接。在第一线路13中布置有开关装置12的第一半导体开关16和第二半导体开关17,其中,第一半导体开关16布置在第一供应端子5和第二半导体开关17之间。如果半导体开关16和17导通,则通过第一供应端子5来提供流经第一线路13的用于运行泵马达3的电的运行电流。关于流经第一线路13的运行电流的流动方向,假定运行电流从第一供应端子5流动到泵马达3。给第一半导体开关16配设有第一二极管18,该第一二极管在运行电流的流动方向上截止。给第二半导体开关17配设有第二二极管19,其在运行电流的流动方向上导通。第二半导体开关17因此是反极性保护开关17。
34.第三线路15一方面与第二供应端子8连接并且另一方面与阀装置4连接。在第三线路15中布置有开关装置12的第五半导体开关20。如果第五半导体开关20导通,则通过第二供应端子8来提供流经第三线路15的用于运行阀装置4的电的阀运行电流。关于流经第三线路15的阀运行电流的流动方向,假定阀运行电流从第二供应端子8流到阀装置4。给第五半导体开关20配设有第五二极管21,该第五二极管在阀运行电流的流动方向上导通。
35.第二线路14在一方面第二半导体开关17与另一方面泵马达3之间与第一线路13电连接。此外,第二线路14在一方面第五半导体开关20与另一方面阀装置4之间与第三线路15电连接。开关装置12的第三半导体开关22和第四半导体开关23布置在第二线路14中,其中第三半导体开关22布置在一方面第三线路15和另一方面第四半导体开关23之间。如果第五半导体开关20、第三半导体开关22和第四半导体开关23导通,则通过第二供应端子8来提供流经第二线路14的用于运行泵马达3的电的运行电流。关于流经第二线路14的运行电流的流动方向,假定运行电流从第二供应端子8流到泵马达3。给第三半导体开关22配设有第三二极管24,该第三二极管在流经第二线路14的运行电流的流动方向上截止。给第四半导体开关23配设有第四二极管25,该第四二极管在流经第二线路14的运行电流的流动方向上导通。第四半导体开关23因此是反极性保护开关23。
36.此外,操纵装置1具有第一电容器26,所述第一电容器在一方面第一半导体开关16与另一方面第一供应端子5之间与第一线路13电连接。
37.此外,操纵装置1具有第二电容器27,该第二电容器在一方面第五半导体开关20与另一方面第二供应端子8之间与第三线路15电连接。
38.此外,操纵装置1具有控制设备28,所述控制设备以信号技术与半导体开关16、17、20、22和23连接并且构造用于操纵半导体开关16、27、20、22和23。
39.下面参照附图2详细阐述用于运行泵马达3的有利的方法。为此,图2借助流程图示出了方法。
40.在第一步骤s1中,控制设备28预先给定用于泵马达3的额定运行电流。应该用额定运行电流来加载泵马达3的定子绕组。由此使泵马达3运行并且就此而言执行制动过程。
41.在第二步骤s2中,控制设备28将额定运行电流与电流阈值比较。
42.如果额定运行电流小于电流阈值,则参考第三步骤s3。在第三步骤s3中,控制设备28然后操控第一半导体开关16和第二半导体开关17,从而第一供应端子5与泵马达3电连接。因此,通过第一供应端子5来提供用于运行泵马达3的运行电流。优选地,在步骤s3中,以时钟控制的方式来操控半导体开关16和17中的至少一个,以便将流经第一线路13的电流的大小调整到额定运行电流的大小。
43.如果额定运行电流大于电流阈值,则参考第四步骤s4。在第四步骤s4中,控制设备28然后在预先给定的第一持续时间内如此操控第一半导体开关16和第二半导体开关17,从而使第一供应端子5与泵马达3电连接。因此,在第一持续时间期间,通过第一供应端子5来提供用于运行泵马达3的运行电流。优选地,在步骤s4中也以时钟控制的方式操控半导体开关16和17中的至少一个,以便将流经第一线路13的电流的大小调整到额定运行电流的大小。随着第一持续时间的结束,至少第一半导体开关16被切换为非导通。第一供应端子5因此与泵马达3电分离。第二半导体开关17优选在第一持续时间结束之后也保持导通。
44.在紧接着第四步骤s4的第五步骤s5中,控制设备28在预先给定的第二持续时间内
通过将第五半导体开关20、第三半导体开关22和第四半导体开关23切换为导通来使第二供应端子8与泵马达3电连接。也就是说,紧接在第一供应端子5和泵马达3彼此电分离之后,第二供应端子8和泵马达3电连接。因此,在第二持续时间期间,运行电流通过第二供应端子8来提供。优选地,在第五步骤s5中,也以时钟控制的方式操控半导体开关20、22和23中的至少一个,以便将流经第二线路14的电流的大小调整到额定运行电流的大小。随着第二持续时间的结束,至少第三半导体开关22被切换为非导通,并且返回参照第四步骤s4。第二供应端子8因此随着第二持续时间的结束与泵马达3电分离。第四半导体开关23优选在第二持续时间结束之后也保持导通。
45.因此,如果额定运行电流大于电流阈值,那么供应端子5和8交替地与泵马达3或泵马达3的定子绕组电连接。额定运行电流相应交替地通过第一供应端子5和第二供应端子8来提供,使得供应端子5和8分别按份额提供额定运行电流。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1