车辆控制装置的制作方法
1.本发明涉及车辆控制装置。
背景技术:
2.已知有一种车辆控制装置,在车辆的点火开关被操作而起动了内燃机时,该车辆控制装置将驾驶座椅(seat)的位置自动地调整到适合驾驶员驾驶的位置(例如参照专利文献1)。由此,在驾驶员就座于驾驶座椅并操作点火开关而起动了内燃机时,驾驶座椅被自动地调整到适合驾驶的位置,所以驾驶员能够省去将驾驶座椅调整到适合驾驶的位置的工夫。
3.现有技术文献
4.专利文献1:日本特开2011-6026号公报
技术实现要素:
5.近年来,开发了在驾驶员位于车辆外的状态下使车辆自动地入库到停车位(泊车空间)或者从停车位自动地出库的技术。在对搭载有这种技术的车辆应用了上述的自动地调节驾驶座椅的技术的情况下,在为了使车辆从停车位自动地出库而起动了内燃机时,驾驶座椅被自动地移动到适合驾驶的位置。于是,驾驶座椅移动到前方,所以驾驶员想要坐上车辆时难以坐进去。
6.本发明是为了应对上述的问题而做出的。即,本发明的目的之一在于提供一种车辆控制装置,其能够在搭载有自动地调整驾驶座椅的位置的系统的车辆从停车位自动地出库时调整驾驶座椅的位置以使得驾驶员容易坐上该车辆。
7.本发明涉及的车辆控制装置搭载于车辆,具备进行所述车辆的驱动装置、制动装置以及转向装置的工作控制的控制单元。
8.所述控制单元,在接收到起动指令的情况下,将该控制单元的工作状态转变为进行所述工作控制的状态即起动状态,在接收到停止指令的情况下,将该控制单元的工作状态转变为不进行所述工作控制的状态即停止状态。
9.另外,所述控制单元,在将该控制单元的工作状态转变为了所述起动状态的情况下,使所述车辆的驾驶座椅前进到指定前进位置,在将该控制单元的工作状态转变为了所述停止状态的情况下,使所述驾驶座椅后退到比所述指定前进位置靠后方的指定后退位置。
10.所述控制单元,在以无线方式从外部接收到请求所述控制单元执行使停泊在停车位的所述车辆自动地移动到指定地方并停车的自动出库控制的自动出库请求指令的情况下,将该控制单元的工作状态转变为所述起动状态并执行所述自动出库控制,在接收到所述自动出库请求指令而将该控制单元的工作状态转变为了所述起动状态的情况下,不使所述驾驶座椅前进而保持在所述指定后退位置。
11.由此,通过自动出库控制,车辆在指定地方停止,位于车辆外的驾驶员要坐上车辆
时,驾驶座椅处于后退位置。因此,驾驶员容易坐上车辆。
12.在本发明涉及的车辆控制装置中,所述控制单元也可以构成为,在接收到所述自动出库请求指令时不使所述驾驶座椅前进而保持在所述指定后退位置之后,在所述车辆的驾驶员就座于所述驾驶座椅时,使所述驾驶座椅前进到所述指定前进位置。
13.由此,在驾驶员就座于驾驶座椅时驾驶座椅前进,所以无需驾驶员手动地使驾驶座椅前进。
14.或者,所述控制单元也可以构成为,在接收到所述自动出库请求指令时不使所述驾驶座椅前进而保持在所述指定后退位置之后,在所述车辆的驾驶员就座于所述驾驶座椅并且从该驾驶员就座于所述驾驶座椅起经过了预定时间时,使所述驾驶座椅前进到所述指定前进位置。
15.由此,在驾驶员就座于驾驶座椅时驾驶座椅前进,所以无需驾驶员手动地使驾驶座椅前进,并且,在驾驶员就座于驾驶座椅后驾驶座椅不会立即开始前进,所以能够防止使驾驶员受到惊吓之类的情况。
16.另外,所述控制单元也可以构成为,在结束所述自动出库控制时将该控制单元的工作状态维持在所述起动状态。由此,能够使得驾驶员无需在坐上车辆后进行使控制单元的工作状态转变为起动状态的操作。
17.另外,本发明涉及的车辆控制装置也可以还具备为了向所述控制单元发送所述起动指令而由所述车辆的驾驶员操作的起动装置。在该情况下,所述控制单元也可以构成为,在接收到响应于由所述驾驶员对所述起动装置的操作而发送来的所述起动指令的情况下,将该控制单元的工作从所述停止状态转变为所述起动状态,并且使所述驾驶座椅前进到所述指定前进位置,之后,当在该控制单元的工作处于所述起动状态时接收到所述自动出库请求指令的情况下,使所述驾驶座椅从所述指定前进位置后退到所述指定后退位置。
18.由此,通过自动出库控制,车辆在指定地方停止,位于车辆外的驾驶员坐上车辆时,驾驶座椅处于后退位置。因此,驾驶员容易坐上车辆。
19.另外,所述控制单元也可以构成为,在该控制单元的工作状态处于所述停止状态并接收到请求所述控制单元执行使所述车辆自动地移动到指定的停车位并停车的自动入库控制的自动入库请求指令的情况下,将该控制单元的工作状态转变为所述起动状态,不使所述驾驶座椅前进而保持在所述指定后退位置,执行所述自动入库控制。
20.在自动入库控制结束的时间点驾驶座椅处于后退位置,所以无需使驾驶座椅移动到后退位置。
21.本发明的构成要素并不限定于在后文参照附图所叙述的本发明的实施方式。根据关于本发明的实施方式的说明应该能够容易理解本发明的其他目的、其他特征以及附带的优点。
附图说明
22.图1是示出本发明的实施方式涉及的车辆控制装置以及搭载有该车辆控制装置的车辆的图。
23.图2的(a)是示出设置于图1所示的车辆的座椅的图,图2的(b)是示出图1所示的车辆的驾驶座椅的图。
24.图3是示出本发明的实施方式涉及的车辆控制装置、与该车辆控制装置进行无线通信的管控中心、以及与该车辆控制装置进行无线通信的手机终端的图。
25.图4是示出基于自动(auto)入库控制的车辆的行驶的图。
26.图5是示出基于自动(auto)出库控制的车辆的行驶的图。
27.图6的(a)是示出基于半自动(semi automatic)入库控制的车辆的行驶的图,图6的(b)是示出基于半自动出库控制的车辆的行驶的图。
28.图7是示出本发明的实施方式涉及的车辆控制装置所执行的例程的流程图。
29.图8是示出本发明的实施方式涉及的车辆控制装置所执行的例程的流程图。
30.图9是示出本发明的实施方式涉及的车辆控制装置所执行的例程的流程图。
31.图10是示出本发明的实施方式涉及的车辆控制装置所执行的例程的流程图。
32.图11是示出本发明的实施方式涉及的车辆控制装置所执行的例程的流程图。
33.图12是示出本发明的实施方式的第1变形例涉及的车辆控制装置所执行的例程的流程图。
34.图13是示出本发明的实施方式的第2变形例涉及的车辆控制装置所执行的例程的流程图。
35.标号说明
36.10车辆控制装置;11座椅移动机构;12车辆行驶用装置;51座椅位置设定装置;52就座传感器;53起动装置;54收发装置;90ecu;100车辆;100d驾驶座椅;121驱动装置;122制动装置;124转向装置;200管控中心;200x停车位;300手机终端。
具体实施方式
37.以下,参照附图,对本发明的实施方式涉及的车辆控制装置进行说明。如图1所示,本发明的实施方式涉及的车辆控制装置10搭载于车辆100。
38.如图2的(a)所示,在车辆100设置有驾驶座椅100d、辅助座椅100f以及后部座椅100r。
39.驾驶座椅100d设置于车辆100的车室100i的前部,是车辆100的驾驶员d就座的座椅。如图2的(b)所示,驾驶座椅100d能够在车辆100的前后方向dl上移动。因此,驾驶座椅100d的位置能够在车辆100的前后方向dl上进行调整。
40.辅助座椅100f设置于车辆100的车室100i的前部且在驾驶座椅100d的旁边,是驾驶员d以外的乘员f就座的座椅。后部座椅100r设置于车辆100的车室100i的后部,是驾驶员d以外的乘员r就座的座椅。
41.如图1所示,车辆控制装置10具备ecu90。ecu是电子控制单元(electronic control unit)的简称。ecu90具备微型计算机作为主要部分。微型计算机包括cpu、rom、ram、非易失性存储器以及接口等。cpu通过执行存储于rom的指令或程序、例程,从而实现各种功能。
42.<座椅移动机构>
43.在车辆100搭载有座椅移动机构11(或者座椅滑动机构、或者座椅位置调整机构)。座椅移动机构11是使驾驶座椅100d在车辆100的前后方向dl上自动地移动的机构。
44.座椅移动机构11电连接于ecu90。ecu90通过控制座椅移动机构11的工作,从而能
够使驾驶座椅100d在车辆100的前后方向dl上移动。以下,如图2的(b)所示,将通过座椅移动机构11使驾驶座椅100d向后方移动并停止时的驾驶座椅100d的位置称为“后退位置pre”,将通过座椅移动机构11使驾驶座椅100d向前方移动并停止时的驾驶座椅100d的位置称为“前进位置pad”。
45.<座椅位置设定装置>
46.另外,在车辆100搭载有座椅位置设定装置51(或者座椅方位(position)设定装置)。座椅位置设定装置51设置于驾驶员d能够操作的车室100i内的部位。
47.座椅位置设定装置51可以是驾驶员d能够进行物理操作的拨动盘或开关等,也可以是驾驶员d能够进行触摸操作的显示器所显示的图标等。
48.驾驶员d能够通过操作座椅位置设定装置51,任意地设定后退位置pre或前进位置pad。因此,驾驶员d能够将容易从车辆100出来的驾驶座椅100d的位置设定为后退位置pre、将容易进行车辆100的驾驶操作的位置设定为前进位置pad。
49.座椅位置设定装置51电连接于ecu90。在对座椅位置设定装置51进行了设定后退位置pre或前进位置pad的操作的情况下,座椅位置设定装置51将与驾驶员d所设定的后退位置pre或前进位置pad相关的信息向ecu90发送。ecu90基于该信息,将驾驶员d所设定的后退位置pre或前进位置pad分别存储为指定后退位置pre_set或指定前进位置pad_set。
50.另外,驾驶员d也能够通过操作座椅位置设定装置51,将驾驶员d手动调整后的驾驶座椅100d的位置设定为前进位置pad或后退位置pre。
51.在对该座椅位置设定装置51进行了将驾驶员d手动调整后的驾驶座椅100d的位置设定为前进位置pad或后退位置pre的操作的情况下,座椅位置设定装置51将与该驾驶座椅100d的位置以及将该位置设定为前进位置pad和后退位置pre中的哪一个相关的信息向ecu90发送。ecu90基于该信息,将驾驶员d手动调整后的驾驶座椅100d的位置存储为指定前进位置pad_set或指定后退位置pre_set。
52.<就座传感器>
53.再者,在车辆100搭载有就座传感器52。就座传感器52电连接于ecu90。就座传感器52在驾驶员d就座于驾驶座椅100d时向ecu90发送信号。ecu90能够基于该信号判定为驾驶员d已就座于驾驶座椅100d。
54.此外,在车辆100搭载有对车室100i内进行拍摄的车内摄像头的情况下,ecu90也可以构成为,根据由该车内摄像头拍摄到的图像来判定驾驶员d是否就座于驾驶座椅100d。
55.<车辆行驶用装置>
56.另外,在车辆100搭载有驱动装置121、制动装置122(刹车(brake)装置)、驻车制动(parking brake)装置123以及转向装置124(steering),作为用于该车辆100的行驶的车辆行驶用装置12。
57.<驱动装置>
58.驱动装置121是产生用于使车辆100行驶的驱动力(或驱动扭矩),并向车辆100(特别是车辆100的驱动轮)施加该驱动力的装置。驱动装置121例如是内燃机和电动马达等。驱动装置121电连接于ecu90。ecu90通过控制驱动装置121的工作,能够控制向车辆100施加的驱动力。
59.<制动装置>
60.制动装置122是向车辆100(特别是车辆100的各车轮)施加用于制动车辆100的制动力(或制动扭矩)的装置。制动装置122电连接于ecu90。ecu90通过控制制动装置122的工作,能够控制向车辆100施加的制动力。
61.<驻车制动装置>
62.驻车制动装置123是向车辆100(特别是车辆100的各车轮)施加用于将车辆100保持为停止状态的制动力的装置。驻车制动装置123电连接于ecu90。ecu90通过使驻车制动装置123工作,能够向车辆100施加将车辆100保持为停止状态的制动力。
63.<转向装置>
64.转向装置124是向车辆100(特别是车辆100的转向轮)施加用于将车辆100转向的转向力(或转向扭矩)的装置。转向装置124电连接于ecu90。ecu90通过控制转向装置124的工作,能够控制向车辆100施加的转向力。
65.<起动装置>
66.再者,在车辆100搭载有起动装置53。起动装置53设置于驾驶员d能够操作的车室100i内的部位。起动装置53既可以是按键操作式的开关,也可以是按钮操作式的开关。驾驶员d能够通过操作起动装置53,将车辆控制装置10(特别是ecu90)的工作状态从停止状态转变为起动状态或者从起动状态转变为停止状态。
67.在本例中,起动状态是车辆控制装置10成为开启(on)状态的状态,是能够进行车辆行驶用装置12等的工作控制的状态。另一方面,停止状态是车辆控制装置10成为关断(off)状态的状态,是不能进行车辆行驶用装置12等的工作控制的状态。
68.起动装置53电连接于ecu90。在对起动装置53进行了使ecu90的工作状态从停止状态转变为起动状态的操作的情况下,起动装置53向ecu90发送起动指令。ecu90在接收到起动指令时,将其自身的工作状态从停止状态转变为起动状态。另一方面,在对起动装置53进行了使ecu90的工作状态从起动状态转变为停止状态的操作的情况下,起动装置53向ecu90发送停止指令。ecu90在接收到停止指令时,将其自身的工作状态从起动状态转变为停止状态。
69.<收发装置>
70.再者,在车辆100搭载有收发装置54。收发装置54电连接于ecu90。收发装置54接收来自外部的各种无线信号,并将所接收到的各种无线信号向ecu90发送。如图3所示,在本例中,各种无线信号是从泊车设施的管控中心200和手机终端300以无线方式发送的信号。
71.泊车设施的管控中心200是与能够停泊大量车辆的泊车设施一并设置的设施。从管控中心200发送的无线信号是管控中心200的ecu经由收发装置以无线方式向外部发送的信号。在本例中,从管控中心200发送的无线信号是用于使ecu90执行后述的自动泊车控制的信号。
72.另外,手机终端300是具备电话功能和通信功能等的终端并且是人可携带的终端。从手机终端300发送的无线信号是手机终端300的ecu经由收发装置以无线方式向外部发送的信号。在本例中,从手机终端300发送的无线信号也是用于使ecu90执行后述的自动泊车控制的信号。
73.此外,ecu90也能够经由收发装置54以无线方式向外部发送信号。ecu90经由收发装置54发送的无线信号例如是用于使管控中心200的ecu和手机终端300的ecu识别ecu90为
搭载于车辆100的ecu这一情况的id信号等。
74.<传感器>
75.再者,在车辆100搭载有各种传感器。在本例中,传感器是加速踏板操作量传感器61、制动踏板操作量传感器62、转向角传感器63、转向扭矩传感器64、车速传感器65、偏航率(yaw rate)传感器66、前后加速度传感器67、横向加速度传感器68、声呐传感器装置71以及摄像头传感器装置72。
76.加速踏板操作量传感器61电连接于ecu90。ecu90经由加速踏板操作量传感器61来检测加速踏板81的操作量ap,并将其取得为加速踏板操作量ap。ecu90控制驱动装置121的工作,以使得从驱动装置121向车辆100施加与所取得的加速踏板操作量ap相应的驱动力。
77.制动踏板操作量传感器62电连接于ecu90。ecu90经由制动踏板操作量传感器62来检测制动踏板82的操作量bp,并将其取得为制动踏板操作量bp。ecu90控制制动装置122的工作,以使得从制动装置122向车辆100施加与所取得的制动踏板操作量bp相应的制动力。
78.转向角传感器63和转向扭矩传感器64电连接于ecu90。ecu90经由转向角传感器63来检测方向盘83相对于中立位置的旋转角度θst,并将其取得为转向角θst。另外,ecu90经由转向扭矩传感器64来检测驾驶员d对转向轴84输入的扭矩tqst,并将其取得为转向扭矩tqst。ecu90控制转向装置124的工作,以使得向车辆100施加与所取得的转向角θst和转向扭矩tqst相应的转向力。
79.车速传感器65电连接于ecu90。ecu90经由车速传感器65来检测车辆100的各车轮的转速vrot,从而取得各车轮的转速vrot。ecu90基于所取得的各车轮的转速vrot,取得车辆100的行驶速度作为车速spd。
80.偏航率传感器66电连接于ecu90。ecu90经由偏航率传感器66来检测车辆100的偏航率yr,并将其取得为车辆偏航率yr。
81.前后加速度传感器67电连接于ecu90。ecu90经由前后加速度传感器67来检测车辆100的前后加速度gx,并将其取得为车辆前后加速度gx。
82.横向加速度传感器68电连接于ecu90。ecu90经由横向加速度传感器68来检测车辆100的横向加速度gy,并将其取得为车辆横向加速度gy。
83.声呐传感器装置71具备多个间隙声呐。声呐传感器装置71电连接于ecu90。声呐传感器装置71向ecu90发送由间隙声呐检测出的信息。ecu90基于该信息取得与存在于车辆100周围的物体相关的信息。
84.摄像头传感器装置72具备多个摄像头。摄像头传感器装置72电连接于ecu90。摄像头传感器装置72向ecu90发送与由摄像头拍摄到的图像相关的信息。ecu90基于该信息取得与由摄像头拍摄到的图像相关的信息。
85.<车辆控制装置的工作的概要>
86.接着,对车辆控制装置10的工作的概要进行说明。
87.车辆控制装置10(特别是ecu90)在将其工作状态从起动状态转变为了停止状态时,进行座椅移动机构11的工作控制而使驾驶座椅100d自动地后退到指定后退位置pre_set。
88.另一方面,车辆控制装置10(特别是ecu90)在将其工作状态从停止状态转变为了起动状态时,进行座椅移动机构11的工作控制而使驾驶座椅100d自动地前进到指定前进位
置pad_set。
89.但是,车辆控制装置10在为了执行后述的自动出库控制而将其工作状态从停止状态转变为了起动状态时,不使驾驶座椅100d前进而保持在指定后退位置pre_set。换言之,车辆控制装置10在为了执行自动出库控制而将其工作状态从停止状态转变为了起动状态这一禁止条件成立时,不使驾驶座椅100d前进而保持在指定后退位置pre_set。在该情况下,车辆控制装置10在之后由就座传感器52检测出驾驶员d已就座于驾驶座椅100d时,使驾驶座椅100d前进到指定前进位置pad_set。
90.<自动泊车控制>
91.自动泊车控制包括自动(auto)泊车控制和半自动(semi-auto)泊车控制。
92.自动(auto)泊车控制例如是所谓的代客泊车(valet parking)控制。代客泊车控制是如下控制:如图4所示,使停在泊车设施的站台(上下车区域)200a的车辆100自动地行驶并在指定的停车位200x内停止,如图5所示,使车辆100从停车位200x自动地行驶,并使该车辆100在站台200a停止。
93.此外,自动(auto)泊车控制也包括如下控制:使停在普通住宅附设的停车位附近的车辆100自动地行驶并在该停车位内停止,使车辆100从该停车位自动地行驶,并使该车辆100在该停车位之外的预定地方停止。
94.另外,半自动控制例如是所谓的远程泊车控制。远程泊车控制是如下控制:如图6的(a)所示,使停在停车位200x附近的车辆100自动地行驶并在该停车位200x内停止,如图6的(b)所示,使车辆100从停车位200x自动地行驶,并使该车辆100在该停车位200x之外的预定地方停止。此外,在远程泊车控制中,仅在进行了对手机终端的显示器的触摸操作等允许车辆100行驶的操作的期间内,车辆100自动地行驶。
95.<自动(auto)泊车控制>
96.自动(auto)泊车控制包括自动(auto)入库控制和自动(auto)出库控制。自动(auto)入库控制是自动泊车控制的自动入库控制之一,自动(auto)出库控制是自动泊车控制的自动出库控制之一。
97.自动(auto)入库控制是即使驾驶员d不进行对加速踏板81、制动踏板82以及方向盘83等操纵器件的操作,也使车辆100自动地行驶并在停车位内停止的控制。
98.自动(auto)出库控制是即使驾驶员d不进行对操纵器件的操作,也使车辆100从停车位自动地行驶并在指定地方停止的控制。
99.车辆控制装置10在以无线方式从手机终端或管控中心等外部装置接收到请求执行自动(auto)入库控制的自动入库请求指令的情况下,判断为被请求将其自身的工作状态从停止状态转变为起动状态,并将其自身的工作状态从停止状态转变为起动状态。而且,车辆控制装置10开始自动(auto)入库控制,使车辆100行驶并在指定的停车位内停止。车辆控制装置10在基于自动(auto)入库控制的车辆100向指定的停车位的入库完成的情况下,使其自身的工作状态从起动状态转变为停止状态并结束自动(auto)入库控制。
100.另外,车辆控制装置10在以无线方式从外部装置接收到请求执行自动(auto)出库控制的自动出库请求指令的情况下,判断为被请求将其自身的工作状态从停止状态转变为起动状态,并将其自身的工作状态从停止状态转变为起动状态。而且,车辆控制装置10开始自动(auto)出库控制,使车辆100从停车位行驶并在指定地方停止。车辆控制装置10在基于
自动(auto)出库控制的车辆100从停车位向指定地方的出库完成的情况下,将其自身的工作状态原样维持在起动状态,结束自动(auto)出库控制。
101.<半自动泊车控制>
102.半自动泊车控制包括半自动入库控制和半自动出库控制。半自动入库控制是自动泊车控制的自动入库控制之一,半自动出库控制是自动泊车控制的自动出库控制之一。
103.半自动入库控制是即使驾驶员d不进行对操纵器件的操作,也使车辆100自动地行驶并在指定的停车位内停止的控制。但是,在半自动入库控制中,仅在进行了对手机终端的显示器的触摸操作等允许车辆100行驶的操作的期间内,车辆控制装置10使车辆100自动地行驶。
104.半自动出库控制是即使驾驶员d不进行对操纵器件的操作,也使车辆100从停车位自动地行驶并在指定地方停止的控制。但是,在半自动出库控制中,也仅在进行了对手机终端的显示器的触摸操作等对外部装置的允许车辆100行驶的操作的期间内,车辆控制装置10使车辆100自动地行驶。
105.车辆控制装置10在以无线方式从外部装置接收到请求执行半自动入库控制的自动入库请求指令的情况下,判断为被请求将其自身的工作状态从停止状态转变为起动状态,并将其自身的工作状态从停止状态转变为起动状态。而且,车辆控制装置10开始半自动入库控制,在外部装置被进行了允许车辆100行驶的操作时,使车辆100行驶并在指定的停车位内停止。车辆控制装置10在基于半自动泊车控制的车辆100向指定的停车位的入库完成的情况下,使其自身的工作状态从起动状态转变为停止状态并结束半自动入库控制。
106.另外,车辆控制装置10在以无线方式从外部装置接收到请求执行半自动出库控制的自动出库请求指令的情况下,判断为被请求将其自身的工作状态从停止状态转变为起动状态,并将其自身的工作状态从停止状态转变为起动状态。而且,车辆控制装置10开始半自动出库控制,在外部装置被进行了允许车辆100行驶的操作时,使车辆100自动地行驶并在指定地方停止。车辆控制装置10在基于半自动出库控制的车辆100从停车位向指定地方的出库完成的情况下,将其自身的工作状态原样地维持在起动状态,结束半自动出库控制。
107.<座椅移动控制>
108.车辆控制装置10在从起动装置53接收到停止指令的情况下,将其自身的工作状态从起动状态转变为停止状态。另外,车辆控制装置10在基于自动泊车控制的车辆100向指定的停车位的入库完成的情况下,也将其自身的工作状态从起动状态转变为停止状态。车辆控制装置10在像这样将其自身的工作状态从起动状态转变为了停止状态时,使驾驶座椅100d后退到指定后退位置pre_set。
109.另外,车辆控制装置10在从起动装置53接收到起动指令的情况下,将其自身的工作状态从停止状态转变为起动状态。车辆控制装置10在以无线方式从外部装置接收到自动出库请求指令的情况下,也将其自身的工作状态从停止状态转变为起动状态。
110.车辆控制装置10在响应于来自起动装置53的起动指令而将其自身的工作状态从停止状态转变为了起动状态时,使驾驶座椅100d自动地前进到指定前进位置pad_set。
111.另一方面,车辆控制装置10在响应于来自外部装置的自动出库请求指令而将其自身的工作状态从停止状态转变为了起动状态时,不使驾驶座椅100d前进而保持在指定后退位置pre_set。即,车辆控制装置10在从外部装置请求了执行自动出库控制这一禁止条件成
立时,不使驾驶座椅100d前进而保持在指定后退位置pre_set。车辆控制装置10在之后由就座传感器52检测出驾驶员d已就座于驾驶座椅100d时使驾驶座椅100d前进到指定前进位置pad_set。
112.由此,通过自动出库控制,车辆100在指定地方停止,当位于车辆100之外的驾驶员d要坐上车辆100时,驾驶座椅100d处于后退位置pre。因此,驾驶员d容易坐上车辆100。
113.<车辆控制装置的工作的详情>
114.接着,对车辆控制装置10的工作的详情进行说明。每经过预定时间,车辆控制装置10的ecu90的cpu将会执行图7所示的例程。
115.因此,在预定的定时,cpu从图7的步骤700开始处理,并使该处理进入步骤705,判定自动(auto)入库请求标志xauto_in_req的值是否为“1”。自动(auto)入库请求标志xauto_in_req是表示是否被请求执行自动(auto)入库控制的标志,其值在接收到请求执行自动(auto)入库控制的自动入库请求指令时被设定为“1”,在自动(auto)入库控制结束时或者被请求停止自动(auto)入库控制时被设定为“0”。
116.cpu在步骤705中判定为“是(yes)”的情况下,使处理进入步骤710,判定自动(auto)入库中标志xauto_in_exe的值是否为“0”。自动(auto)入库中标志xauto_in_exe是表示是否正在执行自动(auto)入库控制的标志,其值在自动(auto)入库控制开始时被设定为“1”,在自动(auto)入库控制结束时或停止时被设定为“0”。
117.cpu在步骤710中判定为“是”的情况下,使处理进入步骤715,将其自身的工作状态从停止状态转变为起动状态。接下来,cpu使处理进入步骤720,将自动(auto)入库中标志xauto_in_exe的值设定为“1”。接下来,cpu使处理进入步骤725。
118.另一方面,cpu在步骤710中判定为“否(no)”的情况下,使处理直接进入步骤725。
119.cpu在使处理进入步骤725后,向车辆行驶用装置12发送用于使车辆100行驶到指定的停车位的工作指令。由此,车辆100自动地行驶。接下来,cpu使处理进入步骤730,判定车辆100向指定的停车位的入库是否完成。
120.cpu在步骤730中判定为“是”的情况下,使处理进入步骤735,向驻车制动装置123发送驻车制动指令。由此,车辆100通过驻车制动装置123而保持为停止状态。接下来,cpu使处理进入步骤740,将自动(auto)入库请求标志xauto_in_req的值设定为“0”并且将自动(auto)入库中标志xauto_in_exe的值设定为“0”。接下来,cpu使处理进入步骤745,将其自身的工作状态从起动状态转变为停止状态。之后,cpu使处理进入步骤795,暂时结束本例程。
121.另一方面,cpu在步骤730中判定为“否”的情况下,使处理直接进入步骤795,暂时结束本例程。在该情况下,继续执行自动(auto)入库控制。
122.另外,cpu在步骤705中判定为“否”的情况下,使处理进入步骤750,将自动(auto)入库中标志xauto_in_exe的值设定为“0”。之后,cpu使处理进入步骤795,暂时结束本例程。
123.再者,每经过预定时间,车辆控制装置10的ecu90的cpu将会执行图8所示的例程。
124.因此,在预定的定时,cpu从图8的步骤800开始处理,并使该处理进入步骤805,判定自动(auto)出库请求标志xauto_out_req的值是否为“1”。自动(auto)出库请求标志xauto_out_req是表示是否被请求执行自动(auto)出库控制的标志,其值在接收到请求执行自动(auto)出库控制的自动出库请求指令时被设定为“1”,在自动(auto)出库控制结束
时或者被请求停止自动(auto)出库控制时被设定为“0”。
125.cpu在步骤805中判定为“是”的情况下,使处理进入步骤810,判定自动(auto)出库中标志xauto_out_exe的值是否为“0”。自动(auto)出库中标志xauto_out_exe是表示是否正在执行自动(auto)出库控制的标志,其值在自动(auto)出库控制开始时被设定为“1”,在自动(auto)出库控制结束时或停止时被设定为“0”。
126.cpu在步骤810中判定为“是”的情况下,使处理进入步骤815,将其自身的工作状态从停止状态转变为起动状态。接下来,cpu使处理进入步骤820,将自动(auto)出库中标志xauto_out_exe的值设定为“1”。接下来,cpu使处理进入步骤825。
127.另一方面,cpu在步骤810中判定为“否”的情况下,使处理直接进入步骤825。
128.cpu在使处理进入步骤825后,向车辆行驶用装置12发送用于使车辆100从停车位行驶到指定地方的工作指令。由此,车辆100自动地行驶。接下来,cpu使处理进入步骤830,判定车辆100向指定地方的出库是否完成。
129.cpu在步骤830中判定为“是”的情况下,使处理进入步骤835,向驻车制动装置123发送驻车制动指令。由此,车辆100通过驻车制动装置123而保持为停止状态。接下来,cpu使处理进入步骤840,将自动(auto)出库请求标志xauto_out_req的值设定为“0”并且将自动(auto)出库中标志xauto_out_exe的值设定为“0”。之后,cpu使处理进入步骤895,暂时结束本例程。在该情况下,cpu将其自身的工作状态维持在起动状态。
130.另一方面,cpu在步骤830中判定为“否”的情况下,使处理直接进入步骤895,暂时结束本例程。在该情况下,继续执行自动(auto)出库控制。
131.另外,cpu在步骤805中判定为“否”的情况下,使处理进入步骤850,将自动(auto)出库中标志xauto_out_exe的值设定为“0”。之后,cpu使处理进入步骤895,暂时结束本例程。
132.再者,每经过预定时间,车辆控制装置10的ecu90的cpu将会执行图9所示的例程。
133.因此,在预定的定时,cpu从图9的步骤900开始处理,并使该处理进入步骤905,判定半自动入库请求标志xsemi_in_req的值是否为“1”。半自动入库请求标志xsemi_in_req是表示是否被请求执行半自动入库控制的标志,其值在接收到请求执行半自动入库控制的自动入库请求指令时被设定为“1”,在半自动入库控制结束时或者被请求停止半自动入库控制时被设定为“0”。
134.cpu在步骤905中判定为“是”的情况下,使处理进入步骤910,判定半自动入库中标志xsemi_in_exe的值是否为“0”。半自动入库中标志xsemi_in_exe是表示是否正在执行半自动入库控制的标志,其值在半自动入库控制开始时被设定为“1”,在半自动入库控制结束时或停止时被设定为“0”。
135.cpu在步骤910中判定为“是”的情况下,使处理进入步骤915,将其自身的工作状态从停止状态转变为起动状态。接下来,cpu使处理进入步骤920,将半自动入库中标志xsemi_in_exe的值设定为“1”。接下来,cpu使处理进入步骤925。
136.另一方面,cpu在步骤910中判定为“否”的情况下,使处理直接进入步骤925。
137.cpu在使处理进入步骤925后,向车辆行驶用装置12发送用于使车辆100行驶到指定的停车位的工作指令。由此,在车辆100的自动行驶被允许期间,车辆100自动地行驶。接下来,cpu使处理进入步骤930,判定车辆100向指定的停车位的入库是否完成。
138.cpu在步骤930中判定为“是”的情况下,使处理进入步骤935,向驻车制动装置123发送驻车制动指令。由此,车辆100通过驻车制动装置123而保持为停止状态。接下来,cpu使处理进入步骤940,将半自动入库请求标志xsemi_in_req的值设定为“0”并且将半自动入库中标志xsemi_in_exe的值设定为“0”。接下来,cpu使处理进入步骤945,将其自身的工作状态从起动状态转变为停止状态。之后,cpu使处理进入步骤995,暂时结束本例程。
139.另一方面,cpu在步骤930中判定为“否”的情况下,使处理直接进入步骤995,暂时结束本例程。在该情况下,继续执行半自动入库控制。
140.另外,cpu在步骤905中判定为“否”的情况下,使处理进入步骤950,将半自动入库中标志xsemi_in_exe的值设定为“0”。之后,cpu使处理进入步骤995,暂时结束本例程。
141.再者,每经过预定时间,车辆控制装置10的ecu90的cpu将会执行图10所示的例程。
142.因此,在预定的定时,cpu从图10的步骤1000开始处理,并使该处理进入步骤1005,判定半自动出库请求标志xsemi_out_req的值是否为“1”。半自动出库请求标志xsemi_out_req是表示是否被请求执行半自动出库控制的标志,其值在接收到请求执行半自动出库控制的自动出库请求指令时被设定为“1”,在半自动出库控制结束时或者被请求停止半自动出库控制时被设定为“0”。
143.cpu在步骤1005中判定为“是”的情况下,使处理进入步骤1010,判定半自动出库中标志xsemi_out_exe的值是否为“0”。半自动出库中标志xsemi_out_exe是表示是否正在执行半自动出库控制的标志,其值在半自动出库控制开始时被设定为“1”,在半自动出库控制结束时或停止时被设定为“0”。
144.cpu在步骤1010中判定为“是”的情况下,使处理进入步骤1015,将其自身的工作状态从停止状态转变为起动状态。接下来,cpu使处理进入步骤1020,将半自动出库中标志xsemi_out_exe的值设定为“1”。接下来,cpu使处理进入步骤1025。
145.另一方面,cpu在步骤1010中判定为“否”的情况下,使处理直接进入步骤1025。
146.cpu在使处理进入步骤1025后,向车辆行驶用装置12发送用于使车辆100从停车位行驶到指定地方的工作指令。由此,在车辆100的自动行驶被允许期间,车辆100自动地行驶。接下来,cpu使处理进入步骤1030,判定车辆100向指定地方的出库是否完成。
147.cpu在步骤1030中判定为“是”的情况下,使处理进入步骤1035,向驻车制动装置123发送驻车制动指令。由此,车辆100通过驻车制动装置123而保持为停止状态。接下来,cpu使处理进入步骤1040,将半自动出库请求标志xsemi_out_req的值设定为“0”并且将半自动出库中标志xsemi_out_exe的值设定为“0”。之后,cpu使处理进入步骤1095,暂时结束本例程。在该情况下,cpu将其自身的工作状态维持在起动状态。
148.另一方面,cpu在步骤1030中判定为“否”的情况下,使处理直接进入步骤1095,暂时结束本例程。在该情况下,继续执行半自动出库控制。
149.另外,cpu在步骤1005中判定为“否”的情况下,使处理进入步骤1050,将半自动出库中标志xsemi_out_exe的值设定为“0”。之后,cpu使处理进入步骤1095,暂时结束本例程。
150.再者,每经过预定时间,车辆控制装置10的ecu90的cpu将会执行图11所示的例程。
151.因此,在预定的定时,cpu从图11的步骤1100开始处理,并使该处理进入步骤1105,判定是否将其自身的工作状态从起动状态转变为了停止状态。
152.cpu在步骤1105中判定为“是”的情况下,使处理进入步骤1110,向座椅移动机构11
发送座椅后退指令。由此,驾驶座椅100d通过座椅移动机构11而后退到指定后退位置pre_set。之后,cpu使处理进入步骤1195,暂时结束本例程。
153.另一方面,cpu在步骤1105中判定为“否”的情况下,使处理进入步骤1115,判定是否将其自身的工作状态从停止状态转变为了起动状态。
154.cpu在步骤1115中判定为“是”的情况下,使处理进入步骤1120,判定响应于接收到自动出库请求指令而将其自身的工作状态从停止状态转变为了起动状态这一禁止条件是否成立。
155.cpu在步骤1120中判定为“是”的情况下,使处理进入步骤1125,判定是否由就座传感器52检测出驾驶员d已就座于驾驶座椅100d。
156.cpu在步骤1125中判定为“是”的情况下,使处理进入步骤1130,向座椅移动机构11发送座椅前进指令。由此,驾驶座椅100d通过座椅移动机构11而前进到指定前进位置pad_set。之后,cpu使处理进入步骤1195,暂时结束本例程。
157.另一方面,cpu在步骤1125中判定为“否”的情况下,使处理直接进入步骤1195,暂时结束本例程。在该情况下,驾驶座椅100d不前进而维持在指定后退位置pre_set。
158.另外,cpu在步骤1120中判定为“否”的情况下,使处理进入步骤1135,向座椅移动机构11发送座椅前进指令。由此,驾驶座椅100d通过座椅移动机构11而前进到指定前进位置pad_set。之后,cpu使处理进入步骤1195,暂时结束本例程。
159.另外,cpu在步骤1115中判定为“否”的情况下,使处理直接进入步骤1195,暂时结束本例程。
160.以上是车辆控制装置10的工作的详情。
161.此外,本发明并不限定于上述实施方式,可以在本发明的范围内采用各种变形例。
162.<第1变形例>
163.例如,作为本发明的实施方式的第1变形例,车辆控制装置10也可以构成为,在从由就座传感器52检测出驾驶员d已就座于驾驶座椅100d起经过了预定时间tth时,使驾驶座椅100d前进到指定前进位置pad_set。
164.具体而言,第1变形例涉及的车辆控制装置10在响应于接收到来自外部装置的自动出库请求指令而将其自身的工作状态从停止状态转变为了起动状态的情况下,不使驾驶座椅100d移动而保持在指定后退位置pre_set。然后,车辆控制装置10之后在从由就座传感器52检测出驾驶员d已就座于驾驶座椅100d起经过了预定时间tth时,使驾驶座椅100d前进到指定前进位置pad_set。
165.若在驾驶员d以舒适的姿势就座于驾驶座椅100d之前驾驶座椅100d就开始自动地前进,则驾驶员d有可能受到惊吓。根据第1变形例,在从检测出驾驶员d向驾驶座椅100d就座起经过了一定时间之后驾驶座椅100d开始前进。因此,在驾驶员d以舒适的姿势就座于驾驶座椅100d之后驾驶座椅100d才开始前进。因此,能够防止使驾驶员d受到惊吓。
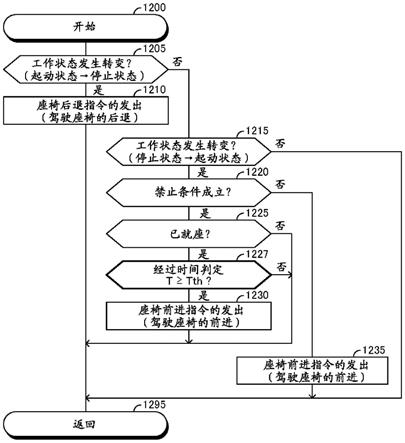
166.每经过预定时间,第1变形例涉及的车辆控制装置10的ecu90的cpu将会执行图12所示的例程来替代图11所示的例程。
167.图12所示的例程除了在图11所示的例程中追加了步骤1227以外,与图11所示的例程相同。因此,图12所示的例程的步骤1205至步骤1225、步骤1230以及步骤1235的处理分别与图11所示的例程的步骤1105至步骤1125、步骤1130以及步骤1135的处理相同。
168.cpu在图12的步骤1225中判定为“是”的情况下,使处理进入步骤1227,判定从在步骤1225中初次判定为由就座传感器52检测出驾驶员d已就座于驾驶座椅100d起经过的时间t是否成为预定时间tth以上。
169.cpu在步骤1227中判定为“是”的情况下,使处理进入步骤1230,向座椅移动机构11发送座椅前进指令。另一方面,cpu在步骤1227中判定为“否”的情况下,使处理直接进入步骤1295,暂时结束本例程。
170.<第2变形例>
171.再者,作为本发明的实施方式的第2变形例,车辆控制装置10也可以构成为,当在其工作状态处于起动状态时以无线方式从外部装置接收到自动出库请求指令的情况下,使驾驶座椅100d自动地后退到指定后退位置pre_set。
172.更具体而言,车辆控制装置10也可以构成为,在响应于来自起动装置53的起动指令而将其自身的工作状态从停止状态转变为了起动状态之后,以无线方式从外部装置接收到自动出库请求指令的情况下,使驾驶座椅100d自动地后退到指定后退位置pre_set。
173.由此,在响应于起动指令而车辆控制装置10的工作状态转变为了起动状态时,驾驶座椅100d前进到指定前进位置pad_set,但在车辆100通过自动出库控制而停在指定地方时,驾驶座椅100d后退到指定后退位置pre_set。因此,驾驶员d容易坐上车辆100。
174.每经过预定时间,第2变形例涉及的车辆控制装置10的ecu90的cpu将会执行图13所示的例程。
175.因此,在预定的定时,cpu从图13的步骤1300开始处理,并使该处理进入步骤1305,判定其自身的工作状态是否响应于来自起动装置53的起动指令而处于起动状态。
176.cpu在步骤1305中判定为“是”的情况下,使处理进入步骤1310,判定自动(auto)出库请求标志xauto_out_req的值是否为“1”。即,cpu判定是否被从外部装置请求执行自动(auto)出库控制。
177.cpu在步骤1310中判定为“是”的情况下,使处理进入步骤1320,向座椅移动机构11发送座椅后退指令。由此,驾驶座椅100d通过座椅移动机构11而后退到指定后退位置pre_set。之后,cpu使处理进入步骤1395,暂时结束本例程。
178.另一方面,cpu在步骤1310中判定为“否”的情况下,使处理进入步骤1315,判定半自动出库请求标志xsemi_out_req的值是否为“1”。即,cpu判定是否被从外部装置请求执行半自动出库控制。
179.cpu在步骤1315中判定为“是”的情况下,使处理进入步骤1320,向座椅移动机构11发送座椅后退指令。由此,驾驶座椅100d通过座椅移动机构11而后退到指定后退位置pre_set。之后,cpu使处理进入步骤1395,暂时结束本例程。
180.另一方面,在步骤1315中判定为“否”的情况下,使处理直接进入步骤1395,暂时结束本例程。
181.另外,cpu在步骤1305中判定为“否”的情况下,也使处理直接进入步骤1395,暂时结束本例程。
182.<第3变形例>
183.再者,作为本发明的实施方式的第3变形例,车辆控制装置10也可以构成为,在响应于接收到来自外部装置的自动入库请求指令而将其自身的工作状态从停止状态转变为
了起动状态的情况下,不使驾驶座椅100d前进而保持在指定后退位置pre_set。
184.由此,在结束自动(auto)入库控制或半自动入库控制时,在车辆控制装置10的工作状态从起动状态转变为了停止状态的情况下,不再需要使驾驶座椅100d后退到指定后退位置pre_set。
185.每经过预定时间,第3变形例涉及的车辆控制装置10的ecu90的cpu将会执行图11所示的例程,但在该情况下,在图11的步骤1125中,cpu判定响应于接收到来自外部装置的自动出库请求指令而将其自身的工作状态从停止状态转变为了起动状态这一禁止条件是否成立、或者响应于来自外部装置的自动入库请求指令而将其自身的工作状态从停止状态转变为了起动状态这一禁止条件是否成立。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1