一种纯电动前驱车扭矩矢量控制方法及存储介质与流程
1.本发明涉及电动车技术领域,特别涉及一种纯电动前驱车扭矩矢量控制方法及存储介质。
背景技术:
2.电动汽车是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆。由于对环境影响相对传统汽车较小,其前景被广泛看好。
3.而现有的电动车通常是根据驾驶员输出的需求扭矩进行行驶,但是现有的电动汽车在急转弯时,特别是在低附着力的路面上进行急转弯时,当驾驶员输出的需求扭矩过大时,会对车辆的稳定性造成影响,容易发生交通事故。
技术实现要素:
4.为此,需要提供一种纯电动前驱车扭矩矢量控制方法及存储介质,解决现有的电动汽车在低附着力的路面上急转弯时,驾驶员输出的需求扭矩过大会对车辆的稳定性造成影响的问题。
5.为实现上述目的,发明人提供了一种纯电动前驱车扭矩矢量控制方法,包括以下步骤:
6.获取当前车辆的车辆信息及行驶路面的路面信息;
7.根据车辆信息获取驾驶员的需求扭矩,并判断驾驶员的需求扭矩是否为正;
8.若为正,则根据路面信息判断车辆是否处于低附着力路面;
9.若是,则根据车辆信息判断车辆是否开始转向;
10.若是,则判断车辆转向是否为急转弯;
11.若是,则计算出干预扭矩;
12.根据计算出的干预扭矩对驾驶员的需求扭矩进行干预得出当前车辆的最终输出扭矩;
13.根据最终输出扭矩对车辆进行控制。
14.进一步优化,所述步骤“根据车辆信息获取驾驶员的需求扭矩”具体包括以下步骤:
15.根据当前车辆的加速踏板开度及制动踏板开度获取驾驶员的需求扭矩。
16.进一步优化,所述路面信息由辅助驾驶系统获得或者由路面识别模块获得。
17.进一步优化,所述步骤“根据车辆信息判断车辆是否开始转向”具体包括以下步骤:
18.根据当前车辆eps发送的方向盘转角判断车辆是否开转向,当方向盘转角大于预设转向值时,则判断车辆开始转向。
19.进一步优化,所述步骤“判断车辆转向是否为急转弯”具体包括以下步骤:
20.根据当前车辆eps发送的方向盘转角计算转角变化率,通过转角变化率判断是否
为急转弯,若转角变化率大于预设变化率,则判断为急转弯。
21.进一步优化,所述步骤“计算出干预扭矩”具体包括以下步骤:
22.根据当前车辆的方向盘转角及车速查表获得干预减速度;
23.根据当前车辆的车重及传动比将干预减速度转化为干预扭矩。
24.进一步优化,所述步骤“根据最终输出扭矩对车辆进行控制”之后还包括以下步骤:
25.判断是否退出扭矩干预;
26.若是,则退出干预扭矩对驾驶员的需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩。
27.进一步优化,所述“判断是否退出扭矩干预”具体包括以下步骤:
28.根据当前车辆是否进入高附着力的路面或者扭矩干预是否超时或者转向角是否稳定以及驾驶员的需求扭矩是否为负判断是否退出干预;
29.当判断当前车辆进入高附着力的路面或者扭矩干预超时或者转向角稳定或者驾驶员的需求扭矩为负时,则退出扭矩干预。
30.进一步优化,所述步骤“退出干预扭矩对驾驶员的需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩”具体还包括以下步骤:
31.当退出干预扭矩对驾驶员的需求扭矩的干预时,对驾驶员的需求扭矩进行滤波处理,将滤波处理后的驾驶员的需求扭矩作为输出扭矩。
32.还提供了另一个技术方案:一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器运行时执行上述所述纯电动前驱车扭矩矢量控制方法的步骤。
33.区别于现有技术,上述技术方案,当电动汽车在行驶的过程中,获取当前车辆的车辆信息及行驶路面的信息,通过车辆的信息进行获取驾驶员到的需求扭矩,并判断驾驶员的需求扭矩是否为正,若为证,则,根据路面信息进行判断车辆是否在低附着力路面上行驶,当确认在低附着力路面上行驶时,则通过车辆信息判断当前车辆是否开始转向,当判断当前车辆进行转向后,并判断当前车辆的转向是否为急转向,若是,则计算出干预扭矩,并通过干预扭矩对驾驶员输出的需求扭矩进行干预,输出最终的输出扭矩,让车辆根据最终的输出扭矩进行急转弯,提高车辆在低附着力路面转弯时的稳定性。
附图说明
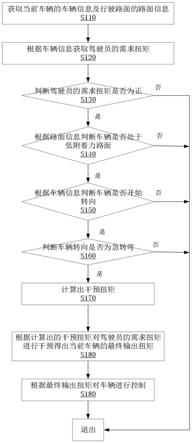
34.图1为具体实施方式所述纯电动前驱车扭矩矢量控制方法的一种流程示意图;
35.图2为具体实施方式所述纯电动前驱车的动力系统的一种结构示意图。
具体实施方式
36.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
37.请参阅图1,本实施例提供了一种纯电动前驱车扭矩矢量控制方法,其中如图2所示,纯电动前驱车的动力系统主要由动力电池。前电机、前主减速器及前差速器组成,纯电动前驱车扭矩矢量控制方法包括以下步骤:
38.步骤s110:获取当前车辆的车辆信息及行驶路面的路面信息;
39.步骤s120:根据车辆信息获取驾驶员的需求扭矩;
40.步骤s130:判断驾驶员的需求扭矩是否为正;
41.若为正,则执行步骤s140:根据路面信息判断车辆是否处于低附着力路面;
42.若是,则执行步骤s150:根据车辆信息判断车辆是否开始转向;
43.若是,则执行步骤s160:判断车辆转向是否为急转弯;
44.若是,则执行步骤s170:计算出干预扭矩;
45.步骤s180:根据计算出的干预扭矩对驾驶员的需求扭矩进行干预得出当前车辆的最终输出扭矩;
46.步骤s190:根据最终输出扭矩对车辆进行控制。
47.当电动汽车在行驶的过程中,获取当前车辆的车辆信息及行驶路面的信息,通过车辆的信息进行获取驾驶员到的需求扭矩,并判断驾驶员的需求扭矩是否为正,若为证,则,根据路面信息进行判断车辆是否在低附着力路面上行驶,当确认在低附着力路面上行驶时,则通过车辆信息判断当前车辆是否开始转向,当判断当前车辆进行转向后,并判断当前车辆的转向是否为急转向,若是,则计算出干预扭矩,并通过干预扭矩对驾驶员输出的需求扭矩进行干预,输出最终的输出扭矩,让车辆根据最终的输出扭矩进行急转弯,提高车辆在低附着力路面转弯时的稳定性。其中,最终的输出扭矩tout=max(0,驾驶员需求扭矩
‑
干预扭矩)。
48.在本实施例中,所述步骤“根据车辆信息获取驾驶员的需求扭矩”具体包括以下步骤:根据当前车辆的加速踏板开度及制动踏板开度获取驾驶员的需求扭矩。通常驾驶员通过加速踏板及制动踏板进行控制车辆的车速,通过获取当前车辆的加速踏板开度及制动板开度获取驾驶员的需求扭矩。在其他实施例中,也可以通过获取驱动电机的扭矩的变化进行获取驾驶员的需求扭矩。
49.在本实施例中,可以通过,路面识别模块进行识别获取当前行驶的路面信息,如通过摄像头进行获取当前行驶路面的图片信息,可以根据获取的路面的图片信息进行判断当前路面是否为低附着力。而在其他实施例中,所述路面信息由辅助驾驶系统获得。辅助驾驶系统(advanced driver assistance system adas)利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性;通过利用车辆自身的辅助驾驶系统进行获取路面信息,无需增加其他器件,减少车辆开发成本。
50.在本实施例中,所述步骤“根据车辆信息判断车辆是否开始转向”具体包括以下步骤:根据当前车辆eps发送的方向盘转角判断车辆是否开转向,当方向盘转角大于预设转向值时,则判断车辆开始转向。通过车辆eps(electric power steering电子助力转向系统)获取当前车辆的方向盘转角,根据方向盘转角的变化进行判断车辆是否要转向,当方向盘转角大于预设转向值时,则判断当前车辆开始转向。在其他实施例中,也可以通过获取轮胎的变化情况,如通过摄像头获取轮胎图片,当判断轮胎的转动角度大于设于的转动角度,则判断车辆开始转向。
51.在本实施例中,所述步骤“判断车辆转向是否为急转弯”具体包括以下步骤:根据
当前车辆eps发送的方向盘转角计算转角变化率,通过转角变化率判断是否为急转弯,若转角变化率大于预设变化率,则判断为急转弯。当车辆出现急转弯时,车辆的方向盘通常在较短的时间内发生较大转向角度的变化,通过根据方向盘转角变化率可以判断车辆是否出现急转弯,当转角变化率大于预设变化率,则可以判断当前车辆急转弯。
52.在本实施例中,所述步骤“计算出干预扭矩”具体包括以下步骤:
53.根据当前车辆的方向盘转角及车速查表获得干预减速度;
54.根据当前车辆的车重及传动比将干预减速度转化为干预扭矩。
55.通过根据方向盘转角和车速查表得到干预减速度。其中,当方向盘转角越大,车速越高时,干预减速度也越大,需要对干预减速度的值进行标定;为了使驾驶员或者乘客不应有明显异常感受,干预减速度最大值为0.03g(g为重力加速度),当计算得到干预减速度后,根据车重、传动比等将干预减速度转化为干预扭矩t=δ*m*a*r/i/η,其中,t是干预扭矩,δ旋转质量换算系数,m汽车质量,a是干预减速度,r是车轮滚动半径,i是传动比,η是传动效率。
56.在本实施例中,所述步骤“根据最终输出扭矩对车辆进行控制”之后还包括以下步骤:
57.判断是否退出扭矩干预;
58.若是,则退出干预扭矩对驾驶员的需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩。
59.当对车辆进行扭矩干预后,判断是否继续对车辆进行扭矩干预,当不需要对车辆进行扭矩干预后,退出干预扭矩对需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩。所述“判断是否退出扭矩干预”具体包括以下步骤:
60.根据当前车辆是否进入高附着力的路面或者扭矩干预是否超时或者转向角是否稳定以及驾驶员的需求扭矩是否为负判断是否退出干预;
61.当判断当前车辆进入高附着力的路面或者扭矩干预超时或者转向角稳定或者驾驶员的需求扭矩为负时,则退出扭矩干预。
62.当车辆进入到高附着力路面、扭矩干预超时、从急转弯状态退出及需求扭矩为负时,则判定不需要继续对需求扭矩进行干预,退出对需求扭矩的干预。其中,为了退出扭矩干预时扭矩突变影响车辆的平顺性,所述步骤“退出干预扭矩对驾驶员的需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩”具体还包括以下步骤:
63.当退出干预扭矩对驾驶员的需求扭矩的干预时,对驾驶员的需求扭矩进行滤波处理,将滤波处理后的驾驶员的需求扭矩作为输出扭矩。
64.当撤销干预扭矩对驾驶员的需求扭矩的干预,恢复驾驶员的需求扭矩时,进行滤波处理,防止扭矩突变影响车辆平顺性。
65.还提供了另一个技术方案:一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器运行时执行上述所述纯电动前驱车扭矩矢量控制方法的步骤。
66.获取当前车辆的车辆信息及行驶路面的路面信息;
67.根据车辆信息获取驾驶员的需求扭矩;
68.判断驾驶员的需求扭矩是否为正;
69.若为正,则执行步骤:根据路面信息判断车辆是否处于低附着力路面;
70.若是,则执行步骤:根据车辆信息判断车辆是否开始转向;
71.若是,则执行步骤:判断车辆转向是否为急转弯;
72.若是,则执行步骤:计算出干预扭矩;
73.根据计算出的干预扭矩对驾驶员的需求扭矩进行干预得出当前车辆的最终输出扭矩;
74.根据最终输出扭矩对车辆进行控制。
75.当电动汽车在行驶的过程中,获取当前车辆的车辆信息及行驶路面的信息,通过车辆的信息进行获取驾驶员到的需求扭矩,并判断驾驶员的需求扭矩是否为正,若为证,则,根据路面信息进行判断车辆是否在低附着力路面上行驶,当确认在低附着力路面上行驶时,则通过车辆信息判断当前车辆是否开始转向,当判断当前车辆进行转向后,并判断当前车辆的转向是否为急转向,若是,则计算出干预扭矩,并通过干预扭矩对驾驶员输出的需求扭矩进行干预,输出最终的输出扭矩,让车辆根据最终的输出扭矩进行急转弯,提高车辆在低附着力路面转弯时的稳定性。其中,最终的输出扭矩tout=max(0,驾驶员需求扭矩
‑
干预扭矩)。
76.在本实施例中,所述步骤“根据车辆信息获取驾驶员的需求扭矩”具体包括以下步骤:根据当前车辆的加速踏板开度及制动踏板开度获取驾驶员的需求扭矩。通常驾驶员通过加速踏板及制动踏板进行控制车辆的车速,通过获取当前车辆的加速踏板开度及制动板开度获取驾驶员的需求扭矩。在其他实施例中,也可以通过获取驱动电机的扭矩的变化进行获取驾驶员的需求扭矩。
77.在本实施例中,可以通过,路面识别模块进行识别获取当前行驶的路面信息,如通过摄像头进行获取当前行驶路面的图片信息,可以根据获取的路面的图片信息进行判断当前路面是否为低附着力。而在其他实施例中,所述路面信息由辅助驾驶系统获得。辅助驾驶系统(advanced driver assistance system adas)利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性;通过利用车辆自身的辅助驾驶系统进行获取路面信息,无需增加其他器件,减少车辆开发成本。
78.在本实施例中,所述步骤“根据车辆信息判断车辆是否开始转向”具体包括以下步骤:根据当前车辆eps发送的方向盘转角判断车辆是否开转向,当方向盘转角大于预设转向值时,则判断车辆开始转向。通过车辆eps(electric power steering电子助力转向系统)获取当前车辆的方向盘转角,根据方向盘转角的变化进行判断车辆是否要转向,当方向盘转角大于预设转向值时,则判断当前车辆开始转向。在其他实施例中,也可以通过获取轮胎的变化情况,如通过摄像头获取轮胎图片,当判断轮胎的转动角度大于设于的转动角度,则判断车辆开始转向。
79.在本实施例中,所述步骤“判断车辆转向是否为急转弯”具体包括以下步骤:根据当前车辆eps发送的方向盘转角计算转角变化率,通过转角变化率判断是否为急转弯,若转角变化率大于预设变化率,则判断为急转弯。当车辆出现急转弯时,车辆的方向盘通常在较短的时间内发生较大转向角度的变化,通过根据方向盘转角变化率可以判断车辆是否出现
急转弯,当转角变化率大于预设变化率,则可以判断当前车辆急转弯。
80.在本实施例中,所述步骤“计算出干预扭矩”具体包括以下步骤:
81.根据当前车辆的方向盘转角及车速查表获得干预减速度;
82.根据当前车辆的车重及传动比将干预减速度转化为干预扭矩。
83.通过根据方向盘转角和车速查表得到干预减速度。其中,当方向盘转角越大,车速越高时,干预减速度也越大,需要对干预减速度的值进行标定;为了使驾驶员或者乘客不应有明显异常感受,干预减速度最大值为0.03g(g为重力加速度),当计算得到干预减速度后,根据车重、传动比等将干预减速度转化为干预扭矩t=δ*m*a*r/i/η,其中,t是干预扭矩,δ旋转质量换算系数,m汽车质量,a是干预减速度,r是车轮滚动半径,i是传动比,η是传动效率。
84.在本实施例中,所述步骤“根据最终输出扭矩对车辆进行控制”之后还包括以下步骤:
85.判断是否退出扭矩干预;
86.若是,则退出干预扭矩对驾驶员的需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩。
87.当对车辆进行扭矩干预后,判断是否继续对车辆进行扭矩干预,当不需要对车辆进行扭矩干预后,退出干预扭矩对需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩。所述“判断是否退出扭矩干预”具体包括以下步骤:
88.根据当前车辆是否进入高附着力的路面或者扭矩干预是否超时或者转向角是否稳定以及驾驶员的需求扭矩是否为负判断是否退出干预;
89.当判断当前车辆进入高附着力的路面或者扭矩干预超时或者转向角稳定或者驾驶员的需求扭矩为负时,则退出扭矩干预。
90.当车辆进入到高附着力路面、扭矩干预超时、从急转弯状态退出及需求扭矩为负时,则判定不需要继续对需求扭矩进行干预,退出对需求扭矩的干预。其中,为了退出扭矩干预时扭矩突变影响车辆的平顺性,所述步骤“退出干预扭矩对驾驶员的需求扭矩的干预,将驾驶员的需求扭矩作为输出扭矩”具体还包括以下步骤:
91.当退出干预扭矩对驾驶员的需求扭矩的干预时,对驾驶员的需求扭矩进行滤波处理,将滤波处理后的驾驶员的需求扭矩作为输出扭矩。
92.当撤销干预扭矩对驾驶员的需求扭矩的干预,恢复驾驶员的需求扭矩时,进行滤波处理,防止扭矩突变影响车辆平顺性。
93.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1