一种顺岸式自动化码头智能充电系统及充电管控方法与流程
1.本发明属于港口车辆充电管控技术领域,尤其涉及一种顺岸式自动化码头智能充电系统及充电管控方法。
背景技术:
2.近年来低碳发展作为一种可持续性发展的理念,低碳绿色发展的目标是实现经济、社会与生态环境的可持续发展。在港口的发展中,充分利用现代科学技术,保证港口的经济发展效益的基础上,减轻排放、降低成本。实现绿色发展、构建生态友好型港口,成为了港口的发展方向与发展趋势。随着自动化程度的提高,越来越多的自动化设备进入了港口。而对应的自动化充电系统也成为了集装箱码头全自动化作业工艺的关键一环。
技术实现要素:
3.本发明目的是提出一种基于顺岸式自动化码头智能充电系统及充电管控方法,用于自动化地为art的智能充电,使电动水平运输设备可以在码头内自主的完成充电工作,根据设备的电量与充电桩的使用情况,由调度系统统一进行充电安排,无需进行人工干预。
4.本发明目的是通过以下技术方案实现的:
5.一种顺岸式自动化码头智能充电系统,利用智能充电桩系统为art进行智能充电,所述智能充电桩系统包括充电车道、自动充电桩及远程调度系统、自动驾驶系统;所述充电车道划分为两片区域,分别为超车道、充电作业车道;所述自动充电桩由充电机柜与自动充电连接器组成,车辆的整车控制器对车辆的状态进行监测,判断车辆是否处于充电状态,控制车辆进入或退出充电模式;需要充电时,车辆到达指定充电桩后插枪连接,成功连接后电池管理系统发送充电连接状态至整车控制器,车辆开始进行充电操作;充电完成后,整车控制器发送完成充电信息至远程调度系统与自动驾驶系统,自动驾驶系统令车辆进入自动驾驶模式完成充电操作。
6.优选的,所述充电车道,由海侧向陆侧布置多条通行车道,靠近堆场一侧布置一条充电车道。通过设置合适间隔,充电车辆可由任一通行车道驶入充电车道,在充电作业车道上的对应位置进行充电,且所有车道均为单向通行。
7.优选的,所述充电车道,由海侧向陆侧布置多条通行车道,靠近堆场一侧布置一条充电车道,设置合适间隔,充电车辆可由任一通行车道驶入充电车道,在充电作业车道上的对应位置进行充电,且所有车道均为单向通行。
8.优选的,所述自动充电桩由充电机柜与自动充电连接器组成,充电机柜为车辆提供三相交流电,自动充电连接器在充电机柜的控制下与车辆进行连接完成充电动作。
9.优选的,所述远程调度系统负责检测车辆电量,当车辆电量低于充电阈值时进行车辆充电的调度,自动驾驶系统会根据车辆是否在充电状态切换车辆的驾驶模式。
10.优选的,所述电池管理系统会对插枪操作进行判断,成功后会发送充电信息至整车控制器和充电桩,完成信息传递后开始充电操作,保证充电的安全性。
11.优选的,所述智能充电系统的充电管控方法流程如下:
12.s1.远程调度系统检测车辆的电量是否低于最低充电阈值,若低于该值,则调度车辆进行充电作业;开始调度车辆后检测充电桩是否回传车辆到位信号;当车辆与充电桩均到达指定位置后便进行高压下电,将车辆退出自动驾驶模式进入充电准备模式;
13.s2.车辆进入充电准备模式后,充电桩执行插枪操作,电池管理系统判断插枪是否到位;成功插枪后,电池管理系统发送充电连接状态至整车控制器并回传成功信息至远程调度系统;此时车辆进入充电模式开始充电;
14.s3.当车辆完成充电后,充电桩发送完成信息至远程调度系统,电池管理系统发送完成信息至整车控制器;车辆退出充电模式,充电桩开始执行拔枪操作;
15.s4.充电桩进行拔枪操作检测,完成操作后发送拔枪到位信息至远程调度系统,远程调度系统停止发送充电信号并且自动驾驶系统令车辆恢复自动驾驶模式,完成此次充电作业;
16.s5.自动驾驶系统循环判断车辆是否处于作业状态,当车辆电量不足时会重新执行充电策略;若车辆不在作业,则会关闭车辆的总电源保证电池的寿命。
17.优选的,所述的智能充电桩系统还包括安全管控模块,分别从车辆充电过程、充电硬件方面进行充电安全管控,其充电安全管控方法具体为:
18.远程调度系统检测到车辆到达指定充电桩指定位置后进行高压下电;
19.当车辆处于充电状态时自动驾驶系统会将车辆锁止,防止车辆恢复到自动驾驶模式,保证充电过程的安全;
20.若充电过程中出现异常情况,自动充电桩会第一时间切断电源连接,并通过人机交互系统向控制终端报警:
21.本发明提出的顺岸式自动化码头智能充电系统,通过充电桩以及车道的合理布置,由车辆通过其整车控制器与外部的远程调度系统以及自动驾驶系统进行充电过程的信息交互,能使需要充电的art车辆安全高效的自动无人化的完成充电流程,本发明将充电过程全自动化,无需人工操作即可完成车辆的充电作业,并且全码头充电桩和车辆均由远程调度系统进行控制,使码头整体更加智能化,提高码头效率。
附图说明
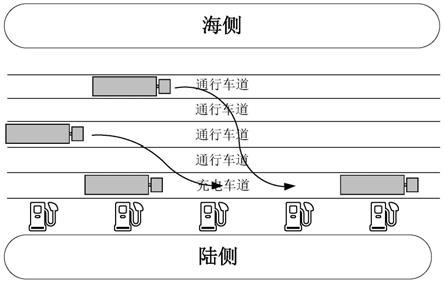
22.图1为本发明实施例提出的顺岸式自动化码头智能充电系统的充电桩及车道的布局图;
23.图2为本发明实施例提出的顺岸式自动化码头智能充电系统的充电桩分布图;
24.图3为本发明实施例提出的顺岸式自动化码头智能充电的充电策略图;
25.图4为本发明实施例提出的顺岸式自动化码头智能充电的充电控制示意图;
26.图5为本发明实施例提出的顺岸式自动化码头智能充电的充电桩的功能结构图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
28.本发明提出的一种顺岸式自动化码头智能充电系统,用于为art(artificial intelligence robot of transportation,即人工智能运输机器人)的智能充电,所述智能充电桩系统包括充电车道、自动充电桩、以及远程调度系统、自动驾驶系统;所述充电车道划分为两片区域,分别为超车道、充电作业车道;所述自动充电桩由充电机柜与自动充电连接器组成。art车辆的整车控制器对车辆的状态进行监测,判断车辆是否处于充电状态;车辆充电时,车辆到达指定充电桩后进行插枪连接,成功连接后由art车辆的电池管理系统发送充电连接状态至整车控制器,车辆开始进行充电操作。充电完成后,车辆发送完成充电信息至远程调度系统与自动驾驶系统,自动驾驶系统令车辆进入自动驾驶模式完成充电操作。
29.上述技术方案中,如图1所示,所述充电车道划分为两片区域,分别为超车道、充电作业车道,所有车道均为单向行驶车道。充电车辆由超车道驶入充电区域,到达对应的充电桩附近时由超车道右拐进入充电车道,并继续行驶至充电桩旁开始充电。
30.上述技术方案中,如图2所示,所述充电桩平均分布在充电车道右侧。在堆场前沿充电区域总共283m,当采用art时,车辆的整体长度为13m,并且车辆的转弯半径也为13m。当某充电桩的前置充电桩处于占用时,会有车辆挡住充电车道。由于内集卡转弯半径为13m,当充电桩平均分布时,各充电桩相距32m,内集卡可不受前置充电桩车辆的影响直接进入当前充电桩进行充电。为提高整体充电效率,本发明将充电桩平均分布,当有车辆需要充电时,不会移动其他正在充电的车辆。
31.上述技术方案中,远程调度系统进行运输任务及运输路径派发,自动驾驶系统进行art车辆运行状态实时监测和车辆转弯、变道、避障等具体行为控制。
32.上述技术方案中,如图3所示,本发明中,通过远程调度系统与自动驾驶系统安排车辆进行充电操作,车辆到达指定充电桩后进行插枪连接,成功连接后电池管理系统发送充电连接状态至整车控制器,车辆开始进行充电操作。充电完成后,车辆发送完成充电信息至远程调度系统与自动驾驶系统,自动驾驶系统令车辆进入自动驾驶模式完成充电操作。
33.上述技术方案中,如图3所示,所述的顺岸式自动化码头智能充电的工作流程如下:
34.s1.远程调度系统检测车辆的电量是否低于最低充电阈值,若低于该值,则调度车辆进行充电作业。开始调度车辆后检测充电桩是否回传车辆到位信号。当车辆与充电桩均到达指定位置后便进行高压下电,将车辆退出自动驾驶模式进入充电准备模式。同时,将可充电信号发送至整车控制器。
35.s2.车辆进入充电准备模式后,充电桩准备开始充电并执行插枪操作,电池管理系统判断插枪是否到位。成功插枪后,电池管理系统检测到充电线成功连接后,发送充电连接状态至整车控制器并回传成功信息至远程调度系统。此时车辆进入充电模式开始充电。此时自动驾驶系统将车辆锁止,在拔枪到位前不可进入自动驾驶模式,不能启动高压等操作。保证车辆在充电状态的安全。
36.s3.当车辆完成充电后,充电桩发送完成信息至远程调度系统,远程调度系统依旧使车辆处于锁止状态,直到拔枪完成。同时,电池管理系统发送完成信息至整车控制器,控制车辆退出充电模式,充电桩开始执行拔枪操作。
37.s4.充电桩进行拔枪操作检测,完成操作后发送拔枪到位信息至远程调度系统,远程调度系统停止发送充电信号并结束锁止操作,使车辆恢复到自动驾驶模式,自动驾驶系统发送自动驾驶模式信号给车辆,使车辆进入自动驾驶模式,完成本次充电循环。
38.s5.自动驾驶系统循环判断车辆是否处于作业状态,当车辆电量不足时会重新执行充电循环。若车辆不处于作业状态,则会关闭车辆的总电源保证电池的寿命。
39.上述技术方案中,如图4
‑
图5所示,充电过程中进行安全管控,防止发生充电风险,其中,所述的安全管控方法具体如下:
40.s6.远程调度系统检测到车辆与充电桩均到达指定位置后进行高压下电,从高压下电到开始充电需控制在3分钟内,且工控机需退出高功耗器件。自动驾驶系统在充电时将车辆锁止于充电状态,防止车辆进入自动驾驶模式。当车辆完成充电后,充电桩将拔枪完成信号发送至调度系统后,自动驾驶系统解除车辆的锁止状态,保证充电过程的安全。
41.s7.自动充电桩具有多重安全防护功能,具体为:
42.充电桩具有自动检测功能,当自动充电桩出现异常时,能通过人机交互系统报警。
43.充电桩具有完善的电气保护机制,异常状况优先触发保护机制。具备浪涌保护、浸水检测保护、高温检测保护、过流保护、过压保护、欠压保护、紧急停电等完善的电气保护功能。
44.充电桩具备完善安全防护功能,具备防触电、防充电枪头意外拔出、断电保护收枪、插偏插空保护、开门断电、枪头过温保护等。
45.充电桩能够通过主动监测车辆电池管理系统运行状态、电池特性参数及充电机自身的运行状态,采用安全冗余设计,主动诊断并处理故障和异常,实现充电过程的主动防护,让充电可监视、可预警、可控制、可追溯,保障充电安全。
46.最后应当说明的是,上述实施例只是用于对本发明的举例和说明,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明不局限于上述实施例,根据本发明教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1