基于全景环视的自动泊车方法、系统、终端和存储介质与流程
1.本发明涉及智能车辆的领域,尤其是涉及一种基于全景环视的自动泊车方法、系统、终端和存储介质。
背景技术:
2.目前,通过全景环视技术与自动泊车技术结合的方式,实现泊车的安全性和智能化。全景环视系统在汽车周围架设能覆盖车辆周边所有视场范围的4到8个广角摄像头,对同一时刻采集到的多路视频影像处理成一幅车辆周边360度的车身俯视图,最后在中控台的屏幕上显示,让驾驶员清楚查看车辆周边是否存在障碍物并了解障碍物的相对方位与距离,帮助驾驶员轻松停泊车辆。自动泊车是指汽车自动泊车入位不需要人工控制,通过超声波雷达识别障碍物之间的空间大小,判断是否满足自动泊车需求。
3.但是,有时车辆驾驶到停车场后,发现车位已满,需要从停车场开出后,重新寻找停车场,而寻找停车场时较为繁琐,降低了用户体验感。
技术实现要素:
4.为了提高用户体验感,本技术提供一种基于全景环视的自动泊车方法、系统、终端和存储介质。
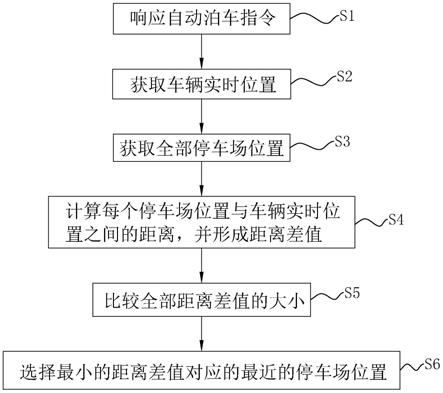
5.第一方面,本技术提供一种基于全景环视的自动泊车方法,采用如下技术方案:一种基于全景环视的自动泊车方法,包括:响应自动泊车指令,所述自动泊车指令通过用户触发界面后生成,所述界面安装在车辆上;获取车辆实时位置;根据车辆实时位置,获取全部停车场位置;根据全部停车场位置,计算每个停车场位置与车辆实时位置之间的距离,并形成距离差值;根据距离差值,比较全部距离差值的大小;选择最小的距离差值对应的最近的停车场位置。
6.通过采用上述技术方案,在停车时,根据全部停车场的位置,计算车辆实时位置与每一个停车场位置之间的距离,并形成距离差值,通过比较距离差值的大小,选择最小的距离差值对应的停车场位置,能够快速的到达最近的停车场,减少了寻找停车场时的繁琐,提高用户体验感。
7.可选的,根据车辆实时位置,获取全部停车场位置之后,还包括:根据全部停车场位置,规划车辆实时位置与每一个停车场位置之间的路线,并形成路线信息;根据路线信息,计算车辆实时位置到达每一个停车场位置所需的时间,并形成时间信息;
根据时间信息,比较全部时间信息的大小;选择最小的时间信息对应的停车场的位置。
8.通过采用上述技术方案,停车场位置确定后,规划前往停车场的路线,形成路线信息,通过比较每一条路线所需的时间,选择用时最少的路线,从而能够使得车辆快速到达停车场。
9.可选的,根据路线信息,计算车辆实时位置到达每一个停车场位置所需的时间,并形成时间信息之前,包括:获取路况数据库信息;根据路况数据库信息,调取车辆实时位置到达每一个停车场位置所经道路的道路情况,并生成路况报告。
10.通过采用上述技术方案,在计算去往最近停车场所需的时间时,需要根据路况信息进行综合考量,从而提高时间计算时的精准度。
11.可选的,选择最小的距离差值对应的最近的停车场位置之后,包括:根据最近的停车场位置,更新车位数据库,所述车位数据库通过界面联网后自动更新;根据车位数据库,获取全部停车位,并显示至界面;根据全部停车位,筛选可选停车位;根据可选停车位,确定目标车位。
12.通过采用上述技术方案,停车场的位置确定后,通过调取车位数据库中的信息,能够知晓选择的停车场是否存在停车位,通过筛选出的可选停车位,确定目标车位,便于自动泊车。
13.可选的,根据可选停车位,确定目标车位之后,包括:获取相邻障碍物之间的空间大小,所述空间大小通过安装在车上的超声波雷达识别后显示;根据空间大小,比对空间大小是否大于车宽;若判断为是,形成出发指令;若判断为否,形成禁停信息。
14.通过采用上述技术方案,目标车位确定后,通过获取到的空间大小,与车自身的宽度进行比较,判断目标车位的空间大小是否适合泊车,若适合泊车,形成出发指令,自动泊车;若不适合泊车,形成禁停信息,便于用户知晓。
15.第二方面,本技术提供一种全景环视的自动泊车系统,采用如下技术方案:自动泊车指令获取模块,用于接收用户出发界面后自动生成车辆实时位置获取模块,用于获取车辆实时位置;停车场位置获取模块,用于获取全部停车场位置;距离差值形成模块,用于计算每个停车场位置与车辆实时位置之间的距离;比较模块,用于比较全部距离差值的大小;选择模块,用于选择最小的距离差值对应的最近的停车场位置。
16.通过采用上述技术方案,通过各个模块之间的配合,能够确定距离车辆实时位置最近的停车场位置,从而便于泊车,节省了寻找停车场位置时的繁琐,大大提高了用户体验
感。
17.第三方面,本技术提供一种终端,包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现所述的基于全景环视的自动泊车方法。
18.第四方面,本技术提供一种计算机可读存储介质,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现所述的基于全景环视的自动泊车方法。
19.综上所述,本技术具有以下至少一种有益技术效果:1.在停车时,根据全部停车场的位置,计算车辆实时位置与每一个停车场位置之间的距离,并形成距离差值,通过比较距离差值的大小,选择最小的距离差值对应的停车场位置,能够快速的到达最近的停车场,减少了寻找停车场时的繁琐,提高用户体验感;2.通过各个模块之间的配合,能够确定距离车辆实时位置最近的停车场位置,从而便于泊车,节省了寻找停车场位置时的繁琐,大大提高了用户体验感。
附图说明
20.图1是本技术实施例方法中的获取全部停车场位置的流程示意图。
21.图2是本技术实施例方法中的后去路况数据库信息的流程示意图。
22.图3是本技术实施例方法中的确定目标车位的流程示意图。
23.图4是本技术实施例系统中的流程框图。
24.附图标记说明:100、自动泊车指令获取模块;101、车辆实时位置获取模块;102、路线信息形成模块;103、停车场位置获取模块;104、路况数据库信息获取模块;105、路况报告形成模块;106、信息形成模块;107、距离差值形成模块;108、比较模块;109、选择模块;110、车位数据库更新模块;111、停车位获取模块;112、空间大小获取模块;113、比对模块;114、结果形成模块。
具体实施方式
25.以下结合全部附图对本技术作进一步详细说明。
26.本技术实施例公开一种基于全景环视的自动泊车方法、系统、终端和存储介质。
27.第一方面,本技术实施例公开一种基于全景环视的自动泊车方法。
28.参照图1,方法包括:s1:响应自动泊车指令。
29.具体的,自动泊车指令通过用户触发界面后生成,界面安装在车辆上,位于方向盘的旁侧。其中,自动泊车指令通过厂家在研发车辆时将其录入,车辆在使用时,界面自动联网,用户通过点击屏幕上的“自动泊车”,能够控制界面响应自动泊车指令。举例说明,界面可为小型计算机。
30.s2:获取车辆实时位置。
31.具体的,车辆实时位置通过安装在车辆上的gps系统进行实时定位,车辆定位后,将定位信号传输至界面上,通过界面显示车辆的实时位置。
32.s3:获取全部停车场位置。
33.具体的,车辆实时位置获取后,以实时位置为中心,搜索全部的停车场位置,并将全部的停车场位置显示在界面上。其中,在搜索停车场位置时,界面联网后,可通过用户语音控制搜索或者手动录入搜索,也可通过手机或其他设备与界面的控制系统连接,实现远程控制搜索。
[0034] s4:计算每个停车场位置与车辆实时位置之间的距离,并形成距离差值。
[0035]
具体的,根据全部停车场位置,计算每一个停车场位置与车辆实时位置之间的距离,形成距离差值。举例说明,获取到的停车场位置有:a停车场、b停车场、c停车场、d停车场、
……
,以车辆实时位置为0点,a停车场的位置距离车辆实时位置为1000米,b停车场的位置距离车辆实时位置为2000米,c停车场的位置距离车辆实时位置为3000米,d停车场的位置距离车辆实时位置为5000米,
……
,则a停车场的距离差值为1000,b停车场的距离差值为2000,c停车场的距离差值为3000,d停车场的距离差值为5000,
……
。
[0036]
s5:比较全部距离差值的大小。
[0037]
具体的,根据全部的距离差值,比较全部距离差值的大小。在s4中距离差值计算完成后,比较距离差值的大小,即比较1000、2000、3000、5000的大小,1000与2000比较,1000与3000比较,1000与5000比较,2000与3000比较,2000与5000比较,3000与5000比较,
……
,最后确定最大值或者最小值,最大值为5000,最小值为1000。
[0038]
s6:选择最小的距离差值对应的最近的停车场位置。
[0039]
具体的,在s5中比较全部的距离差值的大小,选择最小的距离差值对应的停车场位置,即选择最小值为1000对应的停车场位置,即a停车场。
[0040]
参照图2,在s3之后,还包括:s7:规划车辆实时位置与每一个停车场位置之间的路线,并形成路线信息。
[0041]
具体的,全部的停车场位置获取后,通过界面联网后自动查询每一个停车场位置与车辆实时位置之间的路线,形成路线信息。举例说明,a停车场与车辆实时位置之间的路线,即a路线信息为a
→
b
→
c
→
d,b停车场与车辆实时位置之间的路线,即b路线信息为a
→
b
→
c
→
d
→
e,c停车场与车辆实时位置之间的路线,即c路线信息为a
→
b
→
c
→
d
→
e
→
f,d停车场与车辆实时位置之间的路线,即d路线信息为a
→
b
→
c
→
d
→
e
→
f
→
g
→
h。
[0042]
s8:获取路况数据库信息。
[0043]
具体的,路线信息规划完成后,从路况数据库中获取路况信息,路况数据库中的信息通过界面联网后自动更新下载,路况数据库中包括每一个路段的路况,是否能够通行,是否在修路,是否限速等信息。
[0044]
s9:调取车辆实时位置到达每一个停车场位置所经道路的道路情况,并生成路况报告。
[0045]
具体的,从路况数据库中调取a路线信息、b路线信息、c路线信息和d路线信息对应的路段的路况,查询这四种路线对应的路段中是否存在修路等情况。
[0046]
s10:计算车辆实时位置到达每一个停车场位置所需的时间,并形成时间信息。
[0047]
具体的,每一个停车场位置与车辆实时位置之间的路线规划完成后,计算每一个路线信息的用时,形成时间信息。举例说明,路段对应的路况在不修路、可以通行等理想情况下,假设车辆行驶的速度为50km/h,时间计算为距离
÷
速度。对于a路线信息,对应的距离
差值为1000米,即1km
÷
50km/h=0.02h,需要用时为0.02h,即时间信息为1.2min;对于b路线信息,对应的距离差值为2000米,即2km
÷
50km/h=0.04h,即时间信息为2.4min;对于c路线信息,对应的距离差值为3000米,即3km
÷
50km/h=0.06h,即时间信息为3.6min;对于d路线信息,对应的距离差值为5000米,即5km
÷
50km/h=0.1h,即时间信息为6min。
[0048]
s11:比较全部时间信息的大小。
[0049]
具体的,根据全部的时间信息,比较全部的时间信息的大小,即比较1.2、2.4、3.6和6之间的大小,比较方法可参考s5,比较完成后,确定最大值为6,最小值为1.2。
[0050]
s12:选择最小的时间信息对应的停车场的位置。
[0051]
具体的,s11中全部的时间信息比较之后,选择最小的时间信息对应的停车场位置,即选择1.2对应的停车场位置,a停车场。
[0052]
参照图3,s13:更新车位数据库。
[0053]
具体的,车位数据库通过界面联网后自动更新。车位数据库用于存储每个停车场中的车位使用情况,即a停车场对应的车位使用情况,每一个车位上均设置有感应器,每一个感应器上均设置有编号,且每个感应器上的编号不同,即每个停车位的编号不同,每个感应器均与车位数据库进行信息交互,通过感应器感应到泊车后,将信息发送至车位数据库中,在车位数据库中将信息存储。
[0054]
s14:获取全部停车位。
[0055]
具体的,车位数据库更新后,获取全部的停车位,将全部的停车位显示至界面上。其中,已经泊车的停车位显示成灰色不可选停车位,未泊车的停车位显示为可选停车位。
[0056]
s15:筛选可选停车位。
[0057]
具体的,全部停车位获取后,将可选状态的停车位进行筛选,自动过滤不可选停车位。
[0058]
s15具体包括:s151:判断停车位是否为不可选停车位。
[0059]
若判断为是,跳转至s152。
[0060]
若判断为否,跳转至s16。
[0061]
具体的,判断停车位的主要依据是通过感应器发出的信号进行判断,若判断为不可选停车位,跳转至s152;若判断为不是不可选停车位,即是可选停车位,跳转至s16。
[0062]
s152:形成跳过指令。
[0063]
具体的,跳过指令用于控制界面直接跳过该编号,进行下一个编号的判断。
[0064]
s16:确定目标车位。
[0065]
具体的,可选停车位筛选完成后,确定目标车位,以自动泊车至目标车位内,实现泊车目的。
[0066]
s17:获取相邻障碍物之间的空间大小。
[0067]
具体的,空间大小通过安装在车上的超声波雷达识别后显示至界面。
[0068]
s18:比对空间大小是否大于车宽。
[0069]
若判断为是,跳转至s19。
[0070]
若判断为否,跳转至s20。
[0071]
具体的,空间大小识别后,将车自身的宽度与空间大小进行判断,判断空间大小是
否大于车身的宽度,若判断为是,跳转至s19,若判断为否,跳转至s20。
[0072]
s19:形成出发指令。
[0073]
具体的,出发指令通过判断空间大小大于车宽后自动形成,用于控制车进入到目标车位内,实现泊车目的。
[0074]
s20:形成禁停信息。
[0075]
具体的,当判断空间大小小于车宽时,形成禁停信息,用于提醒用户该车位不适合停车。
[0076]
本技术实施例还公开一种全景环视的自动泊车系统,采用如下技术方案:自动泊车指令获取模块100,用于接收用户出发界面后自动生成;车辆实时位置获取模块101,用于获取车辆实时位置;路线信息形成模块102,规划车辆实时位置与每一个停车场位置之间的路线;停车场位置获取模块103,用于获取全部停车场位置;路况数据库信息获取模块104,用于获取路况数据库信息;路况报告形成模块105,用于调取车辆实时位置到达每一个停车场位置所经道路的道路情况;信息形成模块106,用于形成路线信息和时间信息;距离差值形成模块107,用于计算每个停车场位置与车辆实时位置之间的距离;比较模块108,用于比较距离差值大小以及时间信息的大小;选择模块109,用于选择最近的停车场位置;车位数据库更新模块110,用于更新车位数据库;停车位获取模块111,用于获取停车位;空间大小获取模块112,用于获取相邻障碍物之间的空间大小;比对模块113,用于比较空间大小与车宽大小;结果形成模块114,用于根据比对模块形成结果。
[0077]
本技术实施例还公开一种终端,包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现所述的基于全景环视的自动泊车方法。
[0078]
本技术实施例还公开一种计算机可读存储介质,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现所述的基于全景环视的自动泊车方法。
[0079]
以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1