行驶车道计划装置、存储介质以及行驶车道计划方法与流程
1.本发明涉及行驶车道计划装置、存储行驶车道计划用计算机程序的存储介质以及行驶车道计划方法。
背景技术:
2.搭载于车辆的自动控制装置基于车辆的当前位置、车辆的目标位置和地图,生成车辆的行驶路线,并控制车辆沿着该行驶路线行驶。
3.在行驶路线中包括从车辆当前正在行驶的行驶道路进行分岔(分支)、合流、左转、右转等的事件(event)位置的情况下,自动控制装置控制车辆以在分岔位置从行驶道路向分岔道路退出而使得从事件位置进行预定动作。
4.车辆在具有两条以上的车道的道路内的一条车道(行驶车道)上行驶并从事件位置进行预定动作的情况下(例如,在分岔位置向分岔道路退出的情况下),存在临时向与行驶车道相邻的车道(相邻车道)进行变道(车道变更)的情况。在该情况下,自动控制装置在到车辆到达事件位置之前控制车辆从行驶车道向相邻车道移动(例如专利文献1)。
5.存在一种情况,即,在相邻车道上,在比事件位置靠跟前处有其他道路(合流道路)合流,存在其他车辆从该合流道路向相邻车道进入的进入区间。在这种情况下,在以往的自动控制装置中,未意识到进入区间而控制车辆从行驶车道向相邻车道进行变道以到达事件位置。
6.现有技术文献
7.专利文献1:国际公开第2019/198481号
技术实现要素:
8.发明所要解决的问题
9.由于在进入区间内会从合流道路驶来(闯入)其他车辆,因此可以想到在行驶于进入区间或者从行驶车道向相邻车道的进入区间进行变道等情况下难以与其他车辆维持足够的车间距离的状况。于是,在自动控制装置中,优选地控制车辆以使其先从进入区间的旁边通过后再向相邻车道变道并在之后到达事件位置。
10.本发明的目的在于,提供一种使得即使在相邻车道存在进入区间的情况下车辆也能安全地从行驶车道向相邻车道进行变道的行驶车道计划装置。
11.用于解决问题的技术方案
12.根据一个实施方式,提供一种行驶车道计划装置。该行驶车道计划装置具备:判定部,其在表示车辆在道路内行驶的行驶预定车道的行驶车道计划包括车辆在到相邻车道上的事件位置之前要从正在行驶的行驶车道向相邻车道变道的情况下,基于地图信息和行驶车道计划,判定在事件位置与车辆的当前位置之间的相邻车道上是否存在可能会有其他车辆从与行驶车道不同的车道向相邻车道进入的进入区间;车道变更计划部,其在判定为存在进入区间的情况下,生成车辆在从相邻车道上的进入区间的旁边通过后从行驶车道向相
邻车道移动的车道变更计划;以及预告动作控制部,其基于车道变更计划,在车辆行驶于位于相邻车道上的进入区间旁边的行驶车道时,使车辆执行对车辆周围预告该车辆要从行驶车道向相邻车道变道的预告动作。
13.在该行驶车道计划装置中,优选为,预告动作控制部在车辆行驶于位于相邻车道上的进入区间旁边的行驶车道时,作为预告动作,使方向指示器闪烁。
14.另外,在该行驶车道计划装置中,优选为,预告动作控制部在车辆行驶于位于相邻车道上的进入区间旁边的行驶车道时,作为预告动作,使车辆在行驶车道上的比与车辆的行进方向正交的宽度方向的中央靠相邻车道侧的位置行驶。
15.另外,在该行驶车道计划装置中,优选为,具有区间决定部,在判定为存在进入区间的情况下,区间决定部基于地图信息,根据与行驶车道不同的车道和相邻车道的合流开始的合流开始位置、或者与行驶车道不同的车道和相邻车道的合流结束的合流结束位置,决定进入区间的范围。
16.根据另一实施方式,提供一种计算机可读取的存储行驶车道计划用计算机程序的非瞬时性存储介质。该行驶车道计划用计算机程序使处理器执行:在表示车辆在道路内行驶的行驶预定车道的行驶车道计划包括车辆在到相邻车道上的事件位置之前要从正在行驶的行驶车道向相邻车道变道的情况下,基于地图信息和行驶车道计划,判定在事件位置与车辆的当前位置之间的相邻车道上是否存在可能会有其他车辆从与行驶车道不同的车道向相邻车道进入的进入区间;在判定为存在进入区间的情况下,生成车辆在从相邻车道上的进入区间的旁边通过后从行驶车道向相邻车道移动的车道变更计划;以及基于车道变更计划,在车辆行驶于位于相邻车道上的进入区间旁边的行驶车道时,使车辆执行对车辆周围预告该车辆要从行驶车道向相邻车道变道的预告动作。
17.根据又一实施方式,提供一种行驶车道计划方法。根据该行驶车道计划方法,使行驶车道计划装置执行:在表示车辆在道路内行驶的行驶预定车道的行驶车道计划包括车辆在到相邻车道上的事件位置之前要从正在行驶的行驶车道向相邻车道变道的情况下,基于地图信息和行驶车道计划,判定在事件位置与车辆的当前位置之间的相邻车道上是否存在可能会有其他车辆从与行驶车道不同的车道向相邻车道进入的进入区间;在判定为存在进入区间的情况下,生成车辆在从相邻车道上的进入区间的旁边通过后从行驶车道向相邻车道移动的车道变更计划;以及基于车道变更计划,在车辆行驶于位于相邻车道上的进入区间旁边的行驶车道时,使车辆执行对车辆周围预告该车辆要从行驶车道向相邻车道变道的预告动作。
18.发明效果
19.本发明涉及的行驶车道计划装置使得即使在相邻车道存在进入区间的情况下车辆也能安全地从行驶车道向相邻车道进行变道。
附图说明
20.图1是说明行驶车道计划装置的工作的概要的图(其一)。
21.图2是说明行驶车道计划装置的工作的概要的图(其二)。
22.图3是说明行驶车道计划装置的工作的概要的图(其三)。
23.图4是安装有行驶车道计划装置的车辆的概略构成图。
24.图5是行驶车道计划装置的工作流程图。
25.图6是区间决定部的工作流程图。
26.图7是说明区间决定部的处理的图(其一)。
27.图8是说明区间决定部的处理的图(其二)。
28.标号说明
29.10车辆;11摄像头(camera);12a~12f方向指示器;13定位信息接收机;14地图信息存储装置;15导航装置;16位置推定装置;17物体检测装置;18驾驶计划装置;19车辆控制装置;20行驶车道计划装置;21车内网络;31通信接口;32存储器;33处理器;34信号线;41行驶车道计划部;42判定部;43区间决定部;44车道变更计划部;45预告动作控制部。
具体实施方式
30.图1~图3是说明行驶车道计划装置的工作的概要的图。以下,参照图1~图3,说明本说明书所公开的行驶车道计划装置的工作的概要。在图1~图3中,作为事件位置,以分岔位置为例。
31.图1表示由搭载于被自动控制的车辆10的导航装置15所生成的行驶路线80的一例。车辆10在当前位置p1行驶于道路50,并预定从作为事件位置的分岔位置b向分岔道路60退出。在车辆10的当前位置p1与分岔位置b之间,合流道路70在合流位置m向道路50合流。行驶路线80中没有包含与车道有关的信息。
32.图2表示关于图1示出的行驶路线80的最近的驾驶区间,由搭载于车辆10的行驶车道计划装置20所生成的行驶车道计划的一例。行驶车道计划表示在最近的驾驶区间内车辆10行驶的行驶预定车道。在图2中,道路50具有车辆10正在行驶的行驶车道51以及与行驶车道51相邻的相邻车道52,行驶车道51与相邻车道52由车道标线53划分。分岔道路60具有一条车道61,车道61经由车道标线54与相邻车道52连接。另外,合流道路70具有一条车道71,车道71在合流开始位置m1与合流结束位置m2之间经由车道标线55与相邻车道52连接。包括合流开始位置m1和合流结束位置m2在内,将从合流道路70驶入其他车辆的相邻车道52的区域设为进入区间90。稍后对决定进入区间90的方法进行说明。
33.车辆10正在行驶的行驶车道51并非与分岔道路60的车道61连接的相邻车道52,因此,行驶车道计划装置20计划在到作为事件位置的分岔位置b之前车辆10从行驶车道51向相邻车道52移动。而且,在车辆10的当前位置p1与分岔位置b之间存在进入区间90。于是,行驶车道计划装置20生成如图中作为81所示的那样车辆10在从相邻车道52上的进入区间90的旁边通过后从行驶车道51向相邻车道52移动并到达车道变更完成预定位置p3的车道变更计划。由此,车辆10在从相邻车道52上的进入区间90的旁边通过后,从行驶车道51向相邻车道52移动并经过车道变更完成预定位置p3而在事件位置(分岔位置b)向分岔道路60退出。
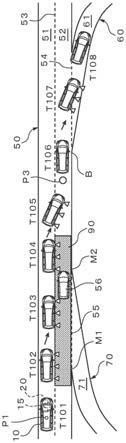
34.图3是用于说明关于图2示出的行驶路线80的最近的驾驶区间,在按照由搭载于车辆10的行驶车道计划装置20所生成的行驶车道计划进行变道时由预告动作控制部45控制的预告动作的图。具体而言,预告动作控制部45在车辆10行驶于位于相邻车道52上的进入区间90的旁边的行驶车道51时,使车辆10进行对车辆10的周围预告车辆10要从行驶车道51向相邻车道52变道的预告动作。作为预告动作,可列举使方向指示器闪烁(点亮)、以及使车
辆10在行驶车道51内靠相邻车道52侧行驶等。
35.如图1~图3所示,行驶车道计划装置20通过使车辆10不在相邻车道52的进入区间90内行驶,能够在车辆10与其他车辆之间维持安全距离。另外,行驶车道计划装置20通过在进行变道之前对车辆10周围预告车辆10要从行驶车道51向相邻车道52变道,使得车辆10容易在从相邻车道52的进入区间90的旁边通过后向相邻车道52变道。由此,行驶车道计划装置20使得即使在相邻车道52存在进入区间90的情况下车辆10也能安全地从行驶车道51向相邻车道52进行变道。
36.图4是安装有行驶车道计划装置20的车辆10的概略构成图。车辆10具有摄像头11、方向指示器12a~12f、定位信息接收机13、地图信息存储装置14、导航装置15、位置推定装置16、物体检测装置17、驾驶计划装置18、车辆控制装置19和行驶车道计划装置20等。再者,车辆10也可以还具有lidar(激光雷达)传感器这一用于对到车辆10周围物体的距离进行测定的测距传感器(未图示)等用于取得探测(probe)信息的传感器。
37.摄像头11、方向指示器12a~12f、定位信息接收机13、地图信息存储装置14、导航装置15、位置推定装置16、物体检测装置17、驾驶计划装置18、车辆控制装置19和行驶车道计划装置20经由遵照控制器局域网络(can)这一标准的车内网络21可通信地连接。
38.摄像头11是设置于车辆10的拍摄部的一个例子。摄像头11以朝向车辆10前方的方式安装于车辆10。摄像头11例如按预定的周期拍摄表示车辆10前方的预定区域的环境的摄像头图像。在摄像头图像中可能表示有车辆10前方的预定区域内所包含的道路和其路面上的车道标线等道路特征物。摄像头11具有由ccd或者c-mos等对可见光具有灵敏度的光电转换元件的阵列构成的二维检测器、和在该二维检测器上对成为拍摄对象的区域的像进行成像的拍摄光学系统。
39.摄像头11每当拍摄到摄像头图像时,将摄像头图像和拍摄到摄像头图像的摄像头图像拍摄时刻经由车内网络21向位置推定装置16和物体检测装置17输出。摄像头图像在位置推定装置16中被用于推定车辆10的位置的处理。另外,摄像头图像在物体检测装置17中被用于检测车辆10周围的其他物体的处理。
40.方向指示器12a~12f以朝向车辆10的右前方、右侧方、右后方、左前方、左侧方、左后方的方式安装在车辆10的外面。方向指示器12a~12f由车辆控制装置19或者行驶车道计划装置20控制为在车辆10右转、左转或者变道等进行行进路线变更时闪烁。在车辆10右转或者向右侧车道进行行进路线变更时,方向指示器12a~12c闪烁。另外,在车辆10左转或者向左侧车道进行行进路线变更时,方向指示器12d~12f闪烁。
41.定位信息接收机13输出表示车辆10的当前位置的定位信息。例如,定位信息接收机13可以设为gnss接收机。定位信息接收机13每当按预定的接收周期取得了定位信息时,将定位信息和取得定位信息的定位信息取得时刻向地图信息存储装置14和导航装置15等输出。
42.地图信息存储装置14存储包含车辆10的当前位置的相对大范围(例如10~30km方形范围)的广域地图信息。该广域地图信息具有包含路面的三维信息、表示道路上的车道标线等道路特征物、结构物的种类和位置的信息以及道路的法定速度等的高精度地图信息。地图信息存储装置14根据车辆10的当前位置,通过经由搭载于车辆10的无线通信装置(未图示)的无线通信,经由基站从外部的服务器接收广域地图信息并将其存储于存储装置。地
图信息存储装置14每当从定位信息接收机13输入了定位信息时,参照所存储的广域地图信息,将包含由定位信息表示的当前位置的相对小区域(例如100m~10km方形范围)的地图信息经由车内网络21向位置推定装置16、物体检测装置17以及行驶车道计划装置20等输出。
43.导航装置15基于导航用地图信息、车辆10的目标位置以及从定位信息接收机13输入的表示车辆10的当前位置的定位信息,生成车辆10的当前位置到目标位置的行驶路线。行驶路线包含与右转、左转、合流、分岔等的位置有关的信息。导航装置15在新设定了目标位置或者车辆10的当前位置离开了行驶路线等情况下,新生成车辆10的行驶路线。导航装置15每当生成了行驶路线时,将该行驶路线经由车内网络21向位置推定装置16以及行驶车道计划装置20等输出。
44.位置推定装置16基于摄像头图像内所表示的车辆10周围的道路特征物,推定车辆10在摄像头图像拍摄时刻的位置。例如,位置推定装置16将在摄像头图像内识别出的车道标线与从地图信息存储装置14输入的地图信息所表示的车道标线进行对比,求取车辆10在摄像头图像拍摄时刻的推定位置和推定方位角。另外,位置推定装置16基于地图信息所表示的车道标线以及车辆10的推定位置和推定方位角,推定车辆10所处的道路上的行驶车道。位置推定装置16每当求取出车辆10在摄像头图像拍摄时刻的推定位置、推定方位角以及行驶车道时,将这些信息经由车内网络21向物体检测装置17、驾驶计划装置18、车辆控制装置19以及行驶车道计划装置20通知。
45.物体检测装置17基于摄像头图像,检测车辆10周围的其他物体及其种类(例如车辆)。其他物体包括在车辆10周围行驶的其他车辆。物体检测装置17对检测出的其他物体进行轨迹追踪,求取其他物体的轨迹。物体检测装置17基于地图信息所表示的车道标线、和其他物体位置,确定其他物体正在行驶的行驶车道。物体检测装置17将表示检测出的其他物体的种类的信息和表示其位置的信息以及行驶车道经由车内网络21通知给驾驶计划装置18。物体检测装置17通过将lidar传感器这一测距传感器(未图示)的探测信息与摄像头图像一起使用,能够更精确地检测其他物体的位置。
46.驾驶计划装置18在按预定周期设定的驾驶计划生成时刻,基于地图信息、行驶车道计划、车辆10的当前位置、周边环境信息和车辆状态信息,生成表示到将来预定时间(例如5秒)为止的车辆10的预定行驶轨迹的驾驶计划。驾驶计划装置18在从行驶车道计划装置20通知了车道变更计划的情况下,基于上述信息以及车道变更计划,生成驾驶计划。驾驶计划被表示为从当前时刻到将来预定时间为止的各时刻的、车辆10的目标位置和该目标位置处的目标车辆速度的集合。生成驾驶计划的周期优选为比生成行驶车道计划的周期短。驾驶计划部36使用卡尔曼滤波器(kalman filter)等预测滤波器,基于检测出的其他车辆的最近的轨迹推定将来的轨迹,并基于根据检测出的其他车辆行驶中的车道和推定出的轨迹所计算出的相对距离,生成车辆10的驾驶计划以使得从车辆10到其他车辆的相对距离成为预定距离以上。驾驶计划装置18在车道变更计划包含车辆10在车道间移动的车道变更的情况下,生成包含车道变更的驾驶计划以使得能够在车辆10与其他车辆之间维持预定的距离。驾驶计划装置18在尽管行驶车道计划包含车辆10在车道间移动的车道变更但却无法在车辆10与其他车辆之间确保预定的距离的情况下,生成驾驶计划以使得在当前的车道上行驶。驾驶计划装置18每当生成了驾驶计划时,将驾驶计划通知给车辆控制装置19。
47.车辆控制装置19基于车辆10的位置、车辆速度和偏航率以及驾驶计划,控制车辆
10的各部以使得车辆10沿着行驶路线行驶。例如,车辆控制装置19按照驾驶计划、车辆10的车辆速度以及偏航率,求取车辆10的转向角、加速度以及角加速度,并设定转向量、加速器开度或者制动量以使得成为该转向角、加速度以及角加速度。而且,车辆控制装置19将与所设定的转向量相应的控制信号向控制车辆10的转向轮的致动器(未图示)输出。另外,车辆控制装置19按照所设定的加速器开度求取燃料喷射量,将与该燃料喷射量相应的控制信号向车辆10的发动机等驱动装置(未图示)输出。或者,车辆控制装置19将与所设定的制动量相应的控制信号向车辆10的制动器(未图示)输出。
48.位置推定装置16、物体检测装置17、驾驶计划装置18以及车辆控制装置19具有的功能的全部或者一部分例如是由在处理器上工作的计算机程序实现的功能模块。或者,位置推定装置16、物体检测装置17、驾驶计划装置18以及车辆控制装置19具有的功能的全部或者一部分也可以是专用的运算电路。位置推定装置16、物体检测装置17、驾驶计划装置18、车辆控制装置19以及行驶车道计划装置20被作为分别的装置进行了说明,但这些装置的全部或者一部分也可以构成为一个装置。
49.行驶车道计划装置20具有经由信号线34相互连接的通信接口(if)31、存储器32和处理器33。稍后会对行驶车道计划装置20的具体的处理进行说明。
50.通信if31是车内通信部的一例,具有用于将行驶车道计划装置20与车内网络21连接的接口电路。即,通信if31经由车内网络21与摄像头11、方向指示器12a~12f、定位信息接收机13、地图信息存储装置14、导航装置15、位置推定装置16、物体检测装置17、驾驶计划装置18和车辆控制装置19等连接。
51.存储器32是存储部的一例,例如具有易失性半导体存储器和非易失性半导体存储器。而且,存储器32存储在由行驶车道计划装置20的处理器33执行的信息处理中所使用的应用(application)的计算机程序和各种数据。
52.处理器33具有一个或多个cpu(central processing unit,中央处理单元)及其外围电路。处理器33也可以还具有逻辑运算单元、数值运算单元或者图形处理单元这样的其他的运算电路。在处理器33具有多个cpu的情况下,也可以按cpu具有存储器。
53.处理器33具有执行行驶车道计划处理的行驶车道计划部41、执行判定处理的判定部42、执行区间决定处理的区间决定部43、执行车道变更计划处理的车道变更计划部44以及执行预告动作控制处理的预告动作控制部45。处理器33具有的这些各部例如是由在处理器33上工作的计算机程序实现的功能模块。或者,处理器33具有的这些各部也可以是设置于处理器33的专用的运算电路。
54.图5是行驶车道计划装置20的工作流程图。以下,参照图5,对行驶车道计划装置20的处理进行说明。在车辆10的行驶期间,行驶车道计划装置20在按预定周期设定的行驶车道计划生成时刻,按照图5所示的工作流程图反复执行处理。
55.首先,行驶车道计划装置20的处理器33的行驶车道计划部41在从行驶路线上选择的最近的驾驶区间(例如10km)内判定行驶路线上是否存在事件位置(步骤s101)。事件位置指的是,从车辆10当前正在行驶的行驶道路分岔的分岔位置、从行驶道路向其他道路合流的合流位置、和从行驶道路进行左转或右转的位置。另外,事件位置包括当前正在行驶的行驶车道消失的消失位置、以及在当前正在行驶的行驶道路包括优先通行车道(例如拼车专用道(carpool lane))的情况下的向优先通行车道进入的合流位置和从优先通行车道离开
的分岔位置。在图1所示的例子中,在最近的驾驶区间内存在分岔位置b,因此行驶车道计划部41判定为存在事件位置。
56.在判定为存在事件位置的情况下(步骤s101-是),行驶车道计划部41判定在到作为事件位置的分岔位置b之前车辆10是否需要在当前行驶中的行驶道路内进行变道(步骤s102)。行驶车道计划部41基于行驶路线、地图信息以及车辆10的当前位置,判定与分岔道路的车道(在图2所示的例子中为61)连接的行驶道路的车道(在图2所示的例子中为52)和车辆10当前正在行驶的行驶车道(在图2所示的例子中为51)是否相同。在与分岔道路的车道连接的行驶道路的车道和行驶车道不同的情况下,行驶车道计划部41判定为在到相邻车道52上的分岔位置b之前车辆10需要在当前行驶中的行驶道路内进行变道(步骤s102-是)。行驶车道计划装置20生成行驶车道计划,该行驶车道计划包括车辆10在行驶车道51上行驶、车辆10在到达分岔位置之前从行驶车道51向相邻车道52移动、在相邻车道52上行驶、在分岔位置向分岔道路60的车道61移动、和在车道61上行驶。另一方面,在与分岔道路的车道连接的行驶道路的车道和行驶车道相同的情况下,行驶车道计划部41判定为车辆10无需在当前行驶中的行驶道路内进行变道(步骤s102-否)。
57.接着,行驶车道计划装置20的处理器33的判定部42基于地图信息和行驶车道计划,判定在车辆10的当前位置与事件位置之间的相邻车道上是否存在进入区间(步骤s103)。在图2所示的例子中,由于具有与车辆10的当前位置(p1)和分岔位置(b)之间的相邻车道52连接的、其他车辆可由此向相邻车道52进入的不同于行驶车道51的车道71,因此判定部42判定为存在进入区间(步骤s103-是)。
58.另一方面,在判定为不存在进入区间的情况下(步骤s103-否),行驶车道计划装置20的处理器33的车道变更计划部44不考虑进入区间的存在,生成从行驶车道51向相邻车道52变道的车道变更计划(步骤s106)。例如,在该情况下,车道变更计划部44生成在到与事件位置相距预先确定的预定距离之处之前向相邻车道52变道的车道变更计划。
59.在判定为存在进入区间的情况下,行驶车道计划装置20的处理器33的区间决定部43基于地图信息,决定进入区间的范围(步骤s104)。关于步骤s104中的判定处理的详情,稍后使用图6以及图7说明。
60.接着,行驶车道计划装置20的处理器33的车道变更计划部44生成在车辆10从相邻车道上的进入区间的旁边通过后车辆10从行驶车道向相邻车道移动的车道变更计划(步骤s105)。在图2所示的例子中,车道变更计划部44决定车辆10在行驶于行驶车道51并从相邻车道52上的进入区间90的旁边通过后越过车道标线53向相邻车道52移动的车道变更完成预定位置p3。在车道变更计划中,车辆10在行驶于行驶车道51并从相邻车道52上的进入区间90的旁边通过后,在车道变更完成预定位置p3的紧跟前的位置向相邻车道52移动,并在从车道变更完成预定位置p3通过后向分岔道路60的车道61移动。车道变更计划包括从行驶车道51向相邻车道52移动的位置。例如,车道变更计划部44生成以使车辆10在进入区间90的终点与车道变更完成预定位置p3的中间的位置从行驶车道51向相邻车道52移动的车道变更计划。另外,车道变更计划包括从相邻车道52向分岔道路60的车道61移动的位置。例如,车道变更计划部44生成在与事件位置(分岔位置b)相距预定距离以内处车辆10从相邻车道52向分岔道路60的车道61移动的车道变更计划。关于车道变更完成预定位置p3的决定方法,稍后使用图7说明。
61.接着,车道变更计划部44将在步骤s105或者步骤s106中生成的车道变更计划与行驶车道计划一起通知给驾驶计划装置18以及预告动作控制部45(步骤s107),并结束一系列步骤。
62.在上述的步骤s101中判定为不存在事件位置的情况下、或者虽然存在事件位置但在步骤s102中判定为无需进行变道的情况下,行驶车道计划部41生成不包括在事件位置处的动作以及车道变更的行驶车道计划,将该行驶车道计划通知给驾驶计划装置18(步骤s108),并结束一系列步骤。行驶车道计划部41在最近的驾驶区间,基于行驶路线、地图信息、周边环境信息和车辆10的当前位置,选择车辆10行驶的道路内的车道,生成不包括在事件位置处的动作以及车道变更的表示行驶预定车道的行驶车道计划。周边环境信息包含在车辆10周围行驶的其他车辆的位置和速度等。
63.图6是区间决定部43的工作流程图。图7是用于说明区间决定部43的处理的图。以下,使用图6以及图7,详细说明图5的步骤s105中的区间决定部43的区间决定处理。
64.首先,区间决定部43参照地图信息,在最近的驾驶区间内,判定在车辆10的当前位置与分岔位置之间的相邻车道上是否包括与行驶车道不同的车道开始与相邻车道合流的合流开始位置(步骤s201)。在图7所示的例子中,区间决定部43判定为在车辆10的当前位置p1与分岔位置b之间的相邻车道上包括合流开始位置m1(步骤s201-是)。另一方面,在判定为不包括合流开始位置的情况下(步骤s201-否),区间决定部43的处理进入步骤s203。
65.在判定为包括合流开始位置的情况下,区间决定部43基于合流开始位置,在相邻车道上决定开始侧进入区间(步骤s202)。在图7所示的例子中,区间决定部43在相邻车道52上将包含合流开始位置m1的预定的区间决定为开始侧进入区间901。开始侧进入区间901是被推定为在车辆10在相邻车道52上行驶或者车辆10打算从行驶车道51向相邻车道52移动的情况下难以在从合流道路70的车道71向相邻车道52进入的其他车辆与车辆10之间维持安全距离的区间。在图7的例子中,区间决定部43将从合流开始位置m1起沿着相邻车道52向车辆10的当前位置p1移动了第1距离的第1位置q1、与从合流开始位置m1起沿着相邻车道52向车道变更完成预定位置p3移动了第2距离的第2位置q2之间决定为开始侧进入区间901。第1距离以及第2距离也可以是固定的基准值。另外,第1距离以及第2距离也可以通过基于车辆10最近的平均车辆速度修正基准值来决定。在该情况下,区间决定部43也可以以使车辆10最近的平均车辆速度越快则第1距离以及第2距离越长的方式修正基准值。
66.接着,区间决定部43参照地图信息,在最近的驾驶区间内,判定在车辆10的当前位置与分岔位置之间的相邻车道上是否包括与行驶车道不同的车道结束与相邻车道合流的合流结束位置(步骤s203)。在图7所示的例子中,区间决定部43判定为在车辆10的当前位置p1与作为事件位置的分岔位置b之间的相邻车道上包括合流结束位置m2(步骤s203-是)。另一方面,在判定为不包括合流结束位置的情况下(步骤s203-否),区间决定部43的处理进入步骤s205。
67.在判定为包括合流结束位置的情况下,区间决定部43基于合流结束位置,在相邻车道上决定结束侧进入区间(步骤s204)。在图7所示的例子中,区间决定部43在相邻车道52上将包含合流结束位置m2的预定的区间决定为结束侧进入区间902。结束侧进入区间902是被推定为在车辆10在相邻车道52上行驶或者车辆10打算从行驶车道51向相邻车道52移动的情况下难以在从合流道路70的车道71向相邻车道52进入的其他车辆与车辆10之间维持
安全距离的区间。在图7的例子中,区间决定部43将从合流结束位置m2起沿着相邻车道52向车辆10的当前位置p1移动了第3距离的第3位置q3、与从合流结束位置m2起沿着相邻车道52向车道变更完成预定位置p3移动了第4距离的第4位置q4之间决定为结束侧进入区间902。第3距离以及第4距离也可以是固定的基准值。另外,第3距离以及第4距离也可以通过基于车辆10最近的平均车辆速度修正基准值来决定。在该情况下,区间决定部43也可以以使车辆10最近的平均车辆速度越快则第3距离以及第4距离越长的方式修正基准值。
68.接着,区间决定部43基于开始侧进入区间和/或结束侧进入区间,决定进入区间的范围(步骤s205),并结束一系列的处理。在如图7所示的例子那样决定了开始侧进入区间901以及结束侧进入区间902的情况下,区间决定部43以包括开始侧进入区间901以及结束侧进入区间902的方式在相邻车道52上决定进入区间90的范围。在图7的例子中,开始侧进入区间901和结束侧进入区间902的一部分重叠,因此,区间决定部43决定包括开始侧进入区间901以及结束侧进入区间902的范围作为进入区间90的范围。进入区间90的范围包含于行驶车道计划。
69.此外,也可能有仅决定了开始侧进入区间的情况以及仅决定了结束侧进入区间的情况,在这些情况下,区间决定部43将它们的范围决定为进入区间的范围,求取表示进入区间的范围的信息。此外,在图7所示的例子中,由于最近的驾驶区间内包含了合流开始位置以及合流结束位置双方,因此区间决定部43将开始侧进入区间以及结束侧进入区间的重复范围设为进入区间的范围。然而,区间决定部43也可以即使在最近的驾驶区间内包含合流开始位置以及合流结束位置双方的情况下也仅基于开始侧进入区间和结束侧进入区间中的某一方来决定进入区间的范围。
70.以下,使用图7,对车道变更完成预定位置p3的决定方法进行说明。行驶车道计划部41首先求取交点p2,然后将从交点p2起沿着相邻车道52向车辆10的当前位置p1移动预定的距离d的位置且位于比进入区间90靠作为事件位置的分岔位置b侧的位置设为车道变更完成预定位置p3。交点p2是将作为从事件位置起的移动目的地的分岔道路60的车道61的中心线61a延长到相邻车道52内得到的延长线61b与相邻车道52的中心线52a相交的点。此外,也可以基于车辆10最近的车辆速度的平均值确定预定的距离d,以使得车辆10经过车道变更完成预定位置p3后到达交点p2所需的时间成为预定时间(例如2~5秒)。另外,行驶车道计划部41也可以将交点p2设为车道变更完成预定位置p3。再者,也可以将进入区间90的第4位置q4与交点p2的中间地点设为车道变更完成预定位置p3。
71.接着,参照图3,详细对在基于使车辆10变道的车道变更计划而车辆10被自动控制的情况下的预告动作进行说明。首先,在时刻t101,车辆10在道路50的车道51上行驶。车辆10的当前位置p1位于比相邻车道52的进入区间90靠跟前。
72.接着,在时刻t102,车辆10开始进行在相邻车道52上的进入区间90的旁边的车道51上的行驶。车辆10中的行驶车道计划装置20的处理器33的预告动作控制部45基于地图信息和车辆10的当前位置,判定为车辆10正在相邻车道52上的进入区间90的旁边的行驶车道51上行驶的情况下,作为预告动作,开始使方向指示器12a~12c的闪烁。方向指示器12a~12c的闪烁持续到车辆变道至相邻车道52为止(时刻t102~t105)。
73.接着,在时刻t103以及t104,作为进一步的预告动作,预告动作控制部45使车辆在比行驶车道51上的与车辆10的行进方向正交的宽度方向的中央靠相邻车道52侧的位置行
驶。
74.接着,在时刻t105,车辆10在从进入区间90的旁边通过后,在比车道变更完成预定位置p3靠跟前的位置,越过车道标线53从车道51向车道52移动。
75.接着,在时刻t106~t108,车辆10在经过车道变更完成预定位置p3后,越过车道标线54从车道52向车道61移动,从道路50向道路60退出。此外,驾驶计划装置18也可以在车辆10行驶于位于相邻车道52上的进入区间90旁边的行驶车道51时,基于在相邻车道52上行驶的其他车辆56的最近的轨迹推定将来的轨迹,并以使得不在所推定的其他车辆56的旁边并排的方式生成车辆10在行驶车道51上行驶的驾驶计划。由此,车辆10容易在经过进入区间90后在其他车辆56与车辆10之间维持预定的距离而安全地从行驶车道51向相邻车道52移动。
76.如上所述,行驶车道计划装置在车辆为了向岔路行驶而要从车辆正在行驶的行驶车道向相邻车道变道、并且在相邻车道上存在进入区间的情况下,生成车辆在从进入区间的旁边通过后从行驶车道向相邻车道移动的车道变更计划。再者,行驶车道计划装置在车辆行驶于位于相邻车道上的进入区间的旁边的行驶车道时,使车辆执行对车辆的周围预告该车辆要从行驶车道向相邻车道变道的预告动作。由此,行驶车道计划装置使得即使在相邻车道存在进入区间的情况下,由于在车道变更动作前向周围的其他车进行充分的预告并且与其他车有足够的车间距离,因此也能够使车辆能尽量安全地向相邻车道变道。
77.使用图8,对区间决定部43的其他处理例进行说明。图8表示关于与图7同样的事件位置(b)与车辆10的当前位置p1之间的相邻车道上的进入区间91、92,从合流道路100的车道101经由车道标线56开始与相邻车道52合流的合流开始位置m1到合流结束位置m2之间有足够的距离的情况。在图8这样的情况下,区间决定部43按照图6所示的处理流程,如图8所示这样决定开始侧进入区间91和结束侧进入区间92。在前述的图7的例子中,开始侧进入区间901与结束侧进入区间902重复,因此,区间决定部43将从第1位置q1到第4位置q4决定为进入区间90的范围。然而,在图8的例子中,开始侧进入区间91与结束侧进入区间92充分地分离开,因此,区间决定部43可以将开始侧进入区间91以及结束侧进入区间92分别决定为进入区间的范围。即,进入区间分为两个部分,在其之间允许车辆10从行驶车道51向相邻车道52变道。此外,在开始侧进入区间91与结束侧进入区间92之间为预定距离以下的情况下,也可以将开始侧进入区间91和结束侧进入区间92与它们之间的区间合并作为进入区间。
78.在本发明中,上述的实施方式的行驶车道计划装置以及行驶车道计划用计算机程序只要不脱离本发明的宗旨就可以适当进行变更。另外,本发明的技术范围不限定于这些实施方式,而是涉及到权利要求书所记载的发明及其等同物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1