一种车速表车速信号的采集处理系统及方法与流程
1.本发明涉及汽车行驶速度采集领域,特别涉及一种利用车内abs系统来采集车速信号的采集处理系统及方法。
背景技术:
2.现有技术中采用里程传感器采集的涡轮蜗杆脉冲信号输入给仪表,仪表通过单片机检测、运算转变进行车速显示,这种车速采集处理方式需要额外增加里程传感器进行信号采集并需要增加can芯片来进行信号传输,增加了整车产品的成本和开发周期。而随着汽车法规的升级,安全性要求越来越高,abs已经变成m1类、n1类车型的标配。abs作为一个标准配置功能在整车上应用,其本身需求实时监测车辆四轮车轮信号对制动力进行合理分配,若利用abs系统对车速信号进行采集处理,则会节省成本。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供一种车速表车速信号的采集处理系统及方法,用于通过车辆的abs系统来实现车速信号的采集和数据。
4.为了实现上述目的,本发明采用的技术方案为:一种车速表车速信号的采集处理系统,包括abs控制单元、轮速传感器,轮速传感器用于采集车轮的轮速信号,其输出端连接abs控制单元,所述abs控制单元根据接收到轮速信号计算得到车速信号后发送给组合仪表模块,所述组合仪表对接收到的数据进行处理得到车速信号并进行展示。
5.所述轮速传感器和齿圈配合产生感应电压信号,通过硬线将电压信号传输给abs控制单元。
6.所述abs控制单元通过硬线连接方式与组合仪表连接,用于将车速信号以脉冲信号的方式发送给仪表。
7.所述组合仪表在上电后,通过采集的脉冲信号控制仪表指针或显示屏数值快速走到对应的车速指示位置。
8.轮速传感器数量为四个,分别对应四个车轮的轮速信号的检测,所述abs 控制单元对每一个轮速传感器采集的轮速信号进行计算得到车速数据并将通过对四个车速数据进行处理得到最终的组合仪表用于显示的车速。
9.一种车速表车速信号的采集处理方法,包括:
10.车辆启动后,轮速传感器和齿圈配合产生感应电压信号,通过硬线将电压信号传输给abs控制单元,abs控制单元对感应电压信号进行处理、计算、转换,并根据和组合仪表约定的车速输出系数,通过硬线发送对应的脉冲信号给组合仪表车速表,组合仪表再进行信号处理计算并显示车速信号。
11.轮速传感器数量为四个,分别对应四个车轮的轮速信号的采集,所述abs 控制单元对每一个轮速传感器采集的轮速信号进行计算得到车速数据并将通过对四个车速数据进行处理得到最终的组合仪表用于显示的车速。
12.abs控制单元对四个车速数据进行判断,若四个车速之间的偏离误差小于设定值,则判断四个车速数据无故障,将四个车速数据取平均值后得到的车速数据作为最终的组合仪表显示的车速数据;若四个车速之间的偏离误差大于设定值,则取驱动轮对应的轮速计算得到的车速,对驱动轮计算得到的车速进行判断,若驱动轮计算得到的车速之间偏离误差大于第二设定值,则abs控制单元发出车速异常报警,发送车速故障信号至组合仪表进行显示;若驱动轮计算得到的车速之间偏离误差小于第二设定值,则取驱动轮计算得到的车速的平均值作为最终的组合仪表显示的车速数据。
13.本发明的优点在于:采用车载的abs系统对车速信号进行采集,不需要增加硬件成本,大大降低了整车成本,缩短了整车的产品开发周期、降低了开发费用,仅需要集成控制软件在abs控制单元中即可实现对于车速的获取;采集的车速数据进行分析判断,提高了车速的准确可靠性。
附图说明
14.下面对本发明说明书各幅附图表达的内容及图中的标记作简要说明:
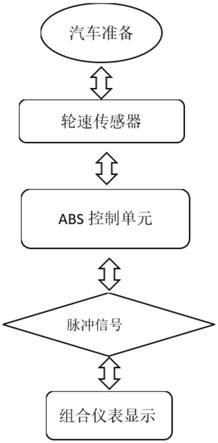
15.图1为本发明采集系统原理示意图。
具体实施方式
16.下面对照附图,通过对最优实施例的描述,对本发明的具体实施方式作进一步详细的说明。
17.本发明主要目的是通过车载的abs系统来实现对于车速的采集计算,从而不需要新增传感器和can芯片来实现,做到芯片复用,节约成本。采用轮速传感器,满足了不额外增加里程传感器,且整车没有can网络的情况下采集车速信号的需求问题。利用abs控制器的运算与控制的功能,采集轮速传感器的信号,进行运算,并将运算的结果转变为脉冲信号,以满足车辆车速表的指针显示功能。本发明不要再额外增加里程传感器进行信号采集,不需要额外增加can芯片进行信号传输,主减速器或变速箱更改时组合仪表不涉及新开发,大大降低了整车成本,缩短了整车的产品开发周期、降低了开发费用,促进了零部件平台化的应用。具体方案如下:
18.一种车速表车速信号的采集处理系统,包括abs控制单元、轮速传感器,轮速传感器用于采集车轮的轮速信号,其输出端连接abs控制单元,abs控制单元根据接收到轮速信号计算得到车速信号后发送给组合仪表模块,组合仪表对接收到的数据进行处理得到车速信号并进行展示。轮速传感器和齿圈配合产生感应电压信号,通过硬线将电压信号传输给abs控制单元。abs控制单元通过硬线连接方式与组合仪表连接,用于将车速信号以脉冲信号的方式发送给仪表。组合仪表在上电后,通过采集的脉冲信号控制仪表指针或显示屏数值快速走到对应的车速指示位置。
19.利用abs控制单元运算与控制的功能,对轮速传感器的信号采集、分析,进行运算,并将运算的结果转变为脉冲信号,通过硬线发送给车速表来实现显示车速的功能。具体为:整车启动后,轮速传感器和齿圈配合产生感应电压信号,通过硬线将电压信号传输给abs控制单元,abs控制单元对感应电压信号进行处理、计算,转换,并根据和组合仪表约定的车速输出系数,通过硬线发送对应的脉冲信号给组合仪表车速表,组合仪表再进行信号处理计
算并显示车速信号。
20.1、轮速传感器:通过测量车轮的轮速,输出对应脉冲信号,通过硬线传输至abs控制单元;
21.2、abs控制单元模块:abs控制单元通过轮速传感器输出的车速信号,结合轮胎滚动半径、车速输出系数,经处理器计算并转化为脉冲信号,通过硬线发出;
22.3、组合仪表模块:仪表上电后,通过车速指示策略、点火采样策略、转速采样策略、带电采样策略以及掉线采样策略使其指针在不同条件下快速走到信号对应位置,以满足仪表车速指示功能;
23.通过车轮的轮速传感器检测的轮速信号按照计算转换成车速信号,然后通过脉冲信号的方式发送至仪表,有仪表获取后转换成所需的车速指示。本技术涉及到的硬件都是abs或车载仪表自带的硬件成本,仅需要在abs控制单元和仪表中集成软件即可实现车速的采集且不需要硬件成本的增加。
24.由于车轮是有四个且车辆车轮对应一个轮速传感器,故而轮速传感器数量为四个,分别对应四个车轮的轮速信号的检测,abs控制单元对每一个轮速传感器采集的轮速信号进行计算得到车速数据并将通过对四个车速数据进行处理得到最终的组合仪表用于显示的车速。四个车速的处理主要是故障筛选和确定车速等。 abs控制单元对四个车速数据进行判断,若四个车速之间的偏离误差小于设定值,则判断四个车速数据无故障,将四个车速数据取平均值后得到的车速数据作为最终的组合仪表显示的车速数据;若四个车速之间的偏离误差大于设定值,则取驱动轮对应的轮速计算得到的车速,对驱动轮计算得到的车速进行判断,若驱动轮计算得到的车速之间偏离误差大于第二设定值,则abs控制单元发出车速异常报警,发送车速故障信号至组合仪表进行显示;若驱动轮计算得到的车速之间偏离误差小于第二设定值,则取驱动轮计算得到的车速的平均值作为最终的组合仪表显示的车速数据。
25.一种车速表车速信号的采集处理方法,包括:车辆启动后,轮速传感器和齿圈配合产生感应电压信号,通过硬线将电压信号传输给abs控制单元,abs控制单元对感应电压信号进行处理、计算、转换,并根据和组合仪表约定的车速输出系数,通过硬线发送对应的脉冲信号给组合仪表车速表,组合仪表再进行信号处理计算并显示车速信号。
26.轮速传感器数量为四个,分别对应四个车轮的轮速信号的采集,所述abs 控制单元对每一个轮速传感器采集的轮速信号进行计算得到车速数据并将通过对四个车速数据进行处理得到最终的组合仪表用于显示的车速。
27.abs控制单元对四个车速数据进行判断,若四个车速之间的偏离误差小于设定值,则判断四个车速数据无故障,将四个车速数据取平均值后得到的车速数据作为最终的组合仪表显示的车速数据,从而提升车速的准确性,因为四个车轮转换成的车速均会有一点误差,而取平均则会更好更准确的表征车速;四个车速之间偏离误差是指车速最大的数值与车速最小的数值之间的差值,主要表征计算得到的车速最大值与最小值之间的误差,一般如果四个数值均正确,则最大最小之差不会大于设定值,如1km/h等,若大于设定值则说明四个数据中有车速异常,不能采用平均值来表征最终车速;
28.若四个车速之间的偏离误差≥设定值,则认为四个车速数据中有计算错误的车速数据或者说误差过大;此时可以直接发出报警信号,对车速计算异常进行报警或进一步地
取驱动轮对应的轮速计算得到的车速,对驱动轮计算得到的车速进行判断,若驱动轮计算得到的车速之间偏离误差大于等于第二设定值,则abs控制单元发出车速异常报警,发送车速故障信号至组合仪表进行显示;若驱动轮计算得到的车速之间偏离误差小于第二设定值,则取驱动轮计算得到的车速的平均值作为最终的组合仪表显示的车速数据。第二设定值、设定值等参数均可以根据实际需求来设定车速阈值,如5km/h、1km/h等,其中驱动轮对应的车速之间的偏差是指驱动轮对应计算的最大车速和最小车速之间的差值,若只有两个驱动轮,这就是两个驱动轮计算车速的差值。这样做的目的是当四个车速均没有异常,则取平均值更能表征车速数据,若有异常,则以驱动轮的数据更加能表征车速的准确性或者直接给出计算错误故障报警。
29.显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1