二次电池的劣化判定装置的制作方法
1.本发明涉及一种二次电池的劣化判定装置,详细而言,涉及一种用于具备发动机、马达以及二次电池的混合动力车辆的二次电池的劣化判定装置。
背景技术:
2.作为这种二次电池的劣化判定装置,提出了具备通信终端装置和服务器的劣化判定装置(例如,参照日本特开2008-76295)。通信终端装置具备将二次电池(电池组)的电池电流设为恒定电流的恒定电流负载电路。通信终端装置通过使用恒定电流负载电路将二次电池的电池电流设为恒定值并测量电池电压,从而检测内部电阻值,并将所检测到的内部电阻值发送到服务器。服务器基于接收到的内部电阻值判定二次电池的劣化(寿命)。由此,从服务器远程判定正在工作的二次电池的劣化。
技术实现要素:
3.然而,在上述二次电池的劣化判定装置中,为了检测二次电池的内部电阻值,需要恒定电流负载电路。因此,在将上述二次电池的劣化判定装置用于具备发动机和马达的混合动力车辆的情况下,需要新追加恒定电流负载电路,从而产生部件个数增加的问题。在混合动力车辆中,使用作为用户对加速踏板等的操作量的用户操作量、各种控制量对发动机、马达执行各种控制。因此,期望不追加恒定电流负载电路等仅用于检测内部电阻值的装置,而基于混合动力车辆的控制所使用的用户操作量、控制量来判定二次电池的劣化。
4.本发明提供一种能够基于由混合动力车辆执行的控制而判定二次电池的劣化的二次电池的劣化判定装置。
5.本发明的一个方式的二次电池的劣化判定装置用于混合动力车辆,被构成为判定所述二次电池的劣化。所述混合动力车辆具备:发动机,其被构成为输出行驶用的动力;马达,其被构成为输出行驶用的动力;二次电池,其被构成为与所述马达交换电力;以及控制装置,其被构成为在预定条件成立时执行预定充电控制,该预定充电控制用于至少使用车速、加速器开度以及所述发动机的燃料喷射量或者所述发动机的转速控制所述发动机和所述马达,以利用来自所述发动机的动力对所述二次电池进行充电。所述劣化判定装置包括处理器。所述处理器构成为:基于所述车速、所述加速器开度以及所述燃料喷射量或者所述转速判定是否正在执行所述预定充电控制。所述处理器被构成为:判定为在充电频度较大时,与该充电频度较小时相比,所述二次电池的劣化发展了,所述充电频度是执行所述预定充电控制的时间相对于预定期间的所需时间的比率。
6.本发明的一个方式的二次电池的劣化判定装置用于在预定条件成立时执行预定充电控制的混合动力车辆,在该预定充电控制中,至少使用车速、加速器开度以及发动机的燃料喷射量或者发动机的转速控制发动机和马达,以利用来自发动机的动力对二次电池进行充电。在本发明的一个方式的二次电池的劣化判定装置中,基于车速、加速器开度以及发动机的燃料喷射量或者转速判定是否正在执行预定充电控制。并且,判定为在充电频度较
高时,与该充电频度较低时相比,二次电池的劣化发展了,该充电频度是执行预定充电控制的时间相对于预定期间的所需时间的比率。一般认为,在二次电池的劣化发展了时,二次电池的蓄电比例容易降低,因此执行预定充电控制的频率将变高。因而,在充电频度较大时,与充电频度较小时相比,能够判定为二次电池的劣化发展了。在此,通过基于充电频度判定二次电池的劣化,能够基于在混合动力车辆中执行的控制来判定二次电池的劣化。
7.在本发明的一个方式的二次电池的劣化判定装置中,所述预定期间也可以设为从对所述混合动力车辆进行系统启动到对所述混合动力车辆进行系统停止为止的期间。根据本发明的一个方式的二次电池的劣化判定装置,与将预定期间设为从混合动力车辆制造后首次系统启动到当前为止的期间相比,能够缩短存储正在执行预定充电控制的时间的期间。由此,即使在不具有大容量的存储装置的情况下,也能够判定二次电池的劣化。
8.在本发明的一个方式的二次电池的劣化判定装置中,所述处理器也可以被构成为:判定为在将第3参数的所述预定期间内的时间序列的数据的累积值除以所述预定期间中的行驶距离得到的值较大时,与该值较小时相比,所述劣化的发展更快。根据本发明的一个方式的二次电池的劣化判定装置,基于加速器开度的第1参数反映出行驶所要求的要求动力。基于发动机的燃料喷射量的第2参数反映出从发动机输出的动力。在混合动力车辆中,要求动力与来自发动机的动力之差的动力与从二次电池输入、输出的电力相当。因而,作为第1参数与第2参数之差的第3参数为反映出向二次电池输入、输出的电力的参数。二次电池的劣化与向二次电池输入、输出的电力相关。因而,在将第3参数的预定期间内的时间序列的数据的累积值除以预定期间中的行驶距离得到的值较大时,与该值较小时相比,能够判定为二次电池的劣化的发展更快。由此,能够更加精度良好地判定二次电池的劣化。
9.在该情况下,所述第1参数也可以设为所述加速器开度,所述第2参数也可以设为基于所述燃料喷射量的所述发动机的输出相对于最大输出的比例,该最大输出为能够从所述发动机输出的动力的最大值。
10.进而,在本发明的一个方式的二次电池的劣化判定装置中,所述处理器也可以被构成为:判定为在第3参数的所述预定期间内的时间序列的数据的累积值和第4参数的所述预定期间内的时间序列的数据的累积值之和除以所述预定期间中的行驶距离得到的值较大时,与该值较小时相比,所述劣化的发展更快,所述第3参数是基于所述加速器开度的第1参数与基于所述燃料喷射量的第2参数之差,所述第4参数基于所述混合动力车辆的减速量。根据本发明的一个方式的二次电池的劣化判定装置,基于加速器开度的第1参数反映出行驶所要求的要求动力。基于发动机的燃料喷射量的第2参数反映出从发动机输出的动力。在混合动力车辆中,要求动力与来自发动机的动力之差的动力与从二次电池输入、输出的电力相当。因而,作为第1参数与第2参数之差的第3参数为反映出向二次电池输入、输出的电力的参数。减速量反映出作用于混合动力车辆的制动转矩,即在减速时通过马达在二次电池中再生的电力。因而,第4参数为反映出在减速时向二次电池输入的电力的参数。二次电池的劣化与向二次电池输入、输出的电力相关。因此,能够判定为在第3参数的预定期间内的时间序列的数据的累积值与第4参数的预定期间内的时间序列的数据的累积值之和除以预定期间中的行驶距离得到的值较大时,与该值较小时相比,二次电池的劣化的发展更快。由此,能够更加精度良好地判定二次电池的劣化。
附图说明
11.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,在附图中,相同的附图标记表示相同的元件,其中:
12.图1是表示具备作为本发明的一实施例的二次电池的劣化判定装置的车辆诊断系统10的结构的概略的结构图。
13.图2是表示混合动力汽车20的结构的概略的结构图。
14.图3是表示发动机22的结构的概略的结构图。
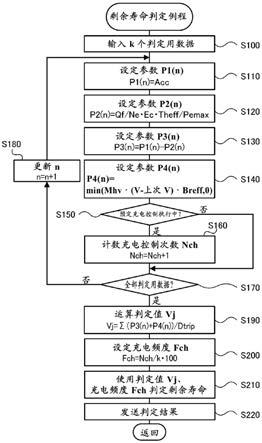
15.图4是表示由管理中心90的计算机92执行的剩余寿命判定例程的一例的流程图。
16.图5是表示剩余寿命设定用图的一例的说明图。
具体实施方式
17.接下来,利用实施例说明用于实施本发明的方式。
18.图1是表示具备作为本发明的一实施例的二次电池的劣化判定装置的车辆诊断系统10的结构的概略的结构图。如图所示,车辆诊断系统10具备多个混合动力汽车20和管理中心90。
19.图2是表示混合动力汽车20的结构的概略的结构图。如图所示,混合动力汽车20具备发动机22、行星齿轮30、马达mg1、mg2、逆变器41、42、电池50、导航装置60以及混合动力用电子控制单元(以下,称为“hvecu”)70。
20.发动机22构成为以汽油、轻油等为燃料而输出动力的内燃机,经由减震器28与行星齿轮30的行星架连接。图3是表示发动机22的结构的概略的结构图。如图所示,发动机22经由配置于进气管(进气口)123的节气门124吸入由空气滤清器122清洁后的空气,并且,从燃料喷射阀126喷射燃料,将空气与燃料混合。然后,经由进气门128将该混合气吸入燃烧室(筒内)129。然后,利用由火花塞130产生的电火花使吸入的混合气爆炸燃烧,将利用该能量被压下的活塞132的往复运动变换为曲轴26的旋转运动。来自燃烧室129的排气经由具有用于净化一氧化碳(co)、烃(hc)、氮氧化物(no
x
)的有害成分的净化催化剂(三元催化剂)的净化装置134而被排出到外部空气中。发动机22由发动机用电子控制单元(以下,称为“发动机ecu”)24进行运转控制。
21.发动机22具备可变气门正时机构150。可变气门正时机构150通过变更进气凸轮相对于进气凸轮轴的相位,在维持工作角的状态下变更进气门128的开闭时刻vtin。
22.虽未图示,发动机ecu24构成为以cpu为中心的微处理器,除cpu之外,还具备存储处理程序的rom、临时存储数据的ram、输入输出端口以及通信端口。
23.经由输入端口向发动机ecu24输入对发动机22进行运转控制所需的来自各种传感器的信号。作为来自各种传感器的信号,能够列举出:来自检测曲轴26的旋转位置的曲柄位置传感器140的曲柄角θcr;来自检测发动机22的冷却水的温度的水温传感器142的冷却水温tw;来自检测节气门124的位置的节气门位置传感器124a的节气门开度th;来自检测对进气门128、排气门131进行开闭的凸轮轴的旋转位置的凸轮位置传感器144的凸轮位置,该进气门128向燃烧室129进气,该排气门131从燃烧室129排气;来自安装于进气管(进气口)123的空气流量计148的吸入空气量qa;来自同样安装于进气管(进气口)123的温度传感器149的进气温度;来自空燃比传感器135a的空燃比af;来自氧传感器135b的氧信号;以及来自检
测燃料罐127的燃压的燃压传感器127a的燃压pf。
24.从发动机ecu24经由输出端口输出用于对发动机22进行运转控制的各种控制信号。作为各种控制信号,能够列举出:向调节节气门124的位置的节气门马达124b的驱动控制信号;向燃料喷射阀126的驱动控制信号;向与点火器一体化的点火线圈138的驱动控制信号;以及向可变气门正时机构150的控制信号。
25.发动机ecu24经由通信端口与hvecu70连接,利用来自hvecu70的控制信号对发动机22进行运转控制。另外,发动机ecu24根据需要向hvecu70输出与发动机22的运转状态相关的数据。发动机ecu24基于曲柄角θcr运算曲轴26的转速,即发动机22的转速ne。发动机euc24基于运算出的发动机22的转速ne和来自空气流量计148的吸入空气量qa,运算负载率(在1个循环中实际吸入的空气的容积相对于发动机22的每1个循环的行程容积的比)kl。
26.行星齿轮30构成为单小齿轮式的行星齿轮机构。马达mg1的转子与行星齿轮30的太阳齿轮连接。在行星齿轮30的环形齿轮连接有驱动轴36,驱动轴36经由差速齿轮38与驱动轮39a、39b连结。发动机22的曲轴26经由减震器28连接在行星齿轮30的行星架。
27.马达mg1例如构成为同步发电电动机,如上所述,转子与行星齿轮30的太阳齿轮连接。马达mg2例如构成为同步发电电动机,转子与驱动轴36连接。逆变器41、42用于马达mg1、mg2的驱动,并且经由电力线54与电池50连接。电力线54上安装有平滑用的电容器57。利用马达用电子控制单元(以下,称为“马达ecu”)40对逆变器41、42的未图示的多个开关元件进行开关控制,从而旋转驱动马达mg1、mg2。
28.虽未图示,马达ecu40构成为以cpu为中心的微处理器,除cpu之外,还具备存储处理程序的rom、临时存储数据的ram、输入输出端口、通信端口。经由输入端口向马达ecu40输入对马达mg1、mg2进行驱动控制所需的来自各种传感器的信号,例如,来自检测马达mg1、mg2的转子的旋转位置的旋转位置检测传感器43、44的旋转位置θm1、θm2等。从马达ecu40经由输出端口输出向逆变器41、42的多个开关元件的开关控制信号等。马达ecu40经由通信端口与hvecu70连接。
29.电池50例如构成为镍氢二次电池,与电力线54连接。该电池50由电池用电子控制单元(以下,称为“电池ecu”)52管理。
30.虽未图示,电池ecu52构成为以cpu为中心的微处理器,除cpu之外,还具备存储处理程序的rom、临时存储数据的ram、输入输出端口、通信端口。经由输入端口向电池ecu52输入管理电池50所需的来自各种传感器的信号。作为输入到电池ecu52的信号,例如能够列举出:来自安装于电池50的端子间的电压传感器51a的电池50的电压vb、来自安装于电池50的输出端子的电流传感器51b的电池50的电流ib。电池ecu52经由通信端口与hvecu70连接。另外,为了管理电池50,电池ecu52基于由电流传感器检测到的充放电电流ib的累积值运算此时能够从电池50放电的电力的容量相对于总容量的比例即蓄电比例soc。
31.虽未图示,导航装置60具备:主体,该主体内置有存储有地图信息等的硬盘等存储介质和控制部,该控制部具有输入输出端口以及通信端口;gps天线,其用于接收与本车的当前位置相关的信息;以及触摸板式的显示器,其显示与本车的当前位置相关的信息、到目的地为止的预定行驶路径等各种信息,并且能够供用户输入各种指示。在此,在地图信息中以数据库的方式存储服务信息(例如,观光信息、停车场等)、各行驶区间(例如,信号机间、交叉路口间等)的道路信息等。道路信息中包括距离信息、宽度信息、车道数量信息、地区信
息(市区、郊外)、种类信息(一般道路、高速道路)、坡度信息、法定速度、信号机的数量等。在与本车的当前位置相关的信息中包括:包含当前位置的纬度、经度的当前位置信息gp;以及表示当前的时刻的gps时间戳tgps。导航装置60经由通信端口与hvecu70连接。
32.虽未图示,hvecu70构成为以cpu为中心的微处理器,除cpu之外,还具备存储处理程序等的rom、临时存储数据的ram、存储数据的非易失性存储器、输入输出端口、通信端口。
33.来自各种传感器的信号经由输入端口被输入到hvecu70。作为被输入到hvecu70的信号,例如能够列举出来自点火开关80的点火信号sig、来自检测变速杆81的操作位置的换档位置传感器82的换档位置sp。另外,还能够列举出来自检测加速踏板83的踩下量的加速踏板位置传感器84的加速器开度acc、来自检测制动踏板85的踩下量的制动踏板位置传感器86的制动踏板位置bp、来自检测车速的车速传感器88的车速v、来自里程表89的行驶距离d,该里程表89检测从车辆制造完成到当前时刻为止的累计行驶距离。需要说明的是,加速器开度acc是加速踏板83的踩下量相对于预先确定为加速踏板83的踩下量的最大值的最大踩下量的比例,在加速踏板83未被踩下时为0%。而且,来自导航装置60的当前位置信息gp等信号经由输入端口被输入。
34.hvecu70基于来自里程表89的行驶距离d运算该行程中的行驶距离dtrip。需要说明的是,行程是从接通点火开关80而完成车辆的系统启动到断开点火开关80而完成车辆的系统停止为止的期间。
35.如上所述,hvecu70经由通信端口与发动机ecu24、马达ecu40、电池ecu52连接。
36.通信装置76构成为与管理中心90的通信装置96进行通信的装置。通信装置76经由通信端口与hvecu70连接,将来自hvecu70的各种数据向管理中心90发送。
37.这样构成的混合动力汽车20以不伴随发动机22的运转而行驶的电动行驶模式(ev行驶模式)、或伴随发动机22的运转而行驶的混合动力运行驶模式(hv行驶模式)行驶。
38.在ev行驶模式下,hvecu70首先基于加速器开度acc和车速v来设定行驶所要求的(驱动轴36所要求的)要求转矩td*。接下来,对马达mg1的转矩指令tm1*设定值0,并且以向驱动轴36输出要求转矩td*的方式设定马达mg2的转矩指令tm2*,将所设定的马达mg1、mg2的转矩指令tm1*、tm2*发送到马达ecu40。马达ecu40以按照转矩指令tm1*、tm2*驱动马达mg1、mg2的方式进行逆变器41、42的多个开关元件的开关控制。hvecu70每隔预定时间tref(例如,几msec等)执行上述处理。
39.在hv行驶模式中,hvecu70首先与ev行驶模式同样地设定要求转矩td*。接下来,对要求转矩td*乘以驱动轴36的转速nd而运算行驶所要求的要求功率pd*,从要求功率pd*减去电池50的充放电要求功率pb*而运算发动机22中要求的要求功率pe*。需要说明的是,在从电池50放电时,充放电要求功率pb*为正值。在此,作为驱动轴36的转速nd,例如使用马达mg2的转速nm2、对车速v乘以换算系数而得到的转速。然后,以从发动机22输出要求功率pe*并且向驱动轴36输出要求转矩td*的方式设定发动机22的目标转速ne*、目标转矩te*、马达mg1、mg2的转矩指令tm1*、tm2*,将发动机22的目标转速ne*和目标转矩te*发送到发动机ecu24,并且将马达mg1、mg2的转矩指令tm1*、tm2*发送到马达ecu40。hvecu70每隔预定时间tref执行上述处理。发动机ecu24进行发动机22的吸入空气量控制、燃料喷射控制、点火控制等,以使发动机22基于目标转速ne*和目标转矩te*运转。关于由马达ecu40进行的马达mg1、mg2(逆变器41、42)的控制,如上所述。
40.在吸入空气量控制中,发动机ecu24基于发动机22的目标转矩te*设定目标空气量qa*,以使吸入空气量qa为目标空气量qa*的方式设定目标节气门开度th*,以使节气门124的节气门开度th为目标节气门开度th*的方式控制节气门马达124b。
41.在燃料喷射控制中,发动机ecu24基于吸入空气量qa设定目标燃料喷射量qf*,以使空燃比af为目标空燃比af*(例如,理论空燃比),根据燃压pf和目标燃料喷射量qf*运算燃料喷射阀126的开阀时间tfopen,并控制燃料喷射阀126以在开阀时间tfopen的期间开阀。然后,根据燃压pf和开阀时间tfopen运算燃料喷射量qf,并发送到hvecu70。
42.在点火控制中,发动机ecu24基于发动机22的转速ne和目标转矩te*设定目标点火时刻tf*,并控制火花塞130以在目标点火时刻tf*进行点火。
43.在实施例的混合动力汽车20中,在加速器开度acc为值0时,hvecu70将发动机22的燃料切断指令发送给发动机ecu24,并且,以通过发动机22的燃料切断、由马达mg1进行的发动机22的带动、马达mg2的驱动向驱动轴36输出要求转矩td*(基本上为制动转矩)的方式设定马达mg1、mg2的转矩指令tm1*、tm2*,将马达mg1、mg2的转矩指令tm1*、tm2*发送到马达ecu40。接收到燃料切断指令的发动机ecu24控制节气马达124b并调整节气门124的位置,以使节气门124的开度为预定开度thfc,并且,停止发动机22的燃料喷射控制(来自燃料喷射阀126的燃料的喷射)、点火控制、开闭时刻控制。需要说明的是,预定开度thfc是全闭或者百分之几(例如,1%、2%、3%等)的开度。发动机ecu24在加速器开启状态等开始燃料喷射的恢复条件成立时,再次开始发动机22的吸入空气量控制、燃料喷射控制、点火控制、开闭时刻控制等。关于由马达ecu40进行的逆变器41、42的控制如上所述。
44.在实施例的混合动力汽车20中,在电池50的蓄电比例soc小于预定比例socmin时,即使在ev行驶中、加速器开度acc为值0时,也使发动机22运转(在发动机22运转停止时起动),执行对电池50进行充电的预定充电控制。此时,hvecu70通过与上述hv行驶模式同样的控制来控制发动机22和马达mg1、mg2。
45.管理中心90具备作为管理服务器的计算机92、存储装置94以及通信装置96。计算机92除作为处理器的cpu之外,还具有存储处理程序的rom、临时存储数据的ram、输入输出端口、通信端口等。存储装置94例如构成为硬盘、ssd等。存储装置94存储与各混合动力汽车20的导航装置60所存储的地图信息相同的地图信息。通信装置96进行与各混合动力汽车20的通信装置76的通信。计算机92、存储装置94以及通信装置96相互经由信号线连接。
46.接下来,对这样构成的车辆诊断系统10的动作,特别是判定电池50的剩余寿命(劣化)时的动作进行说明。首先说明混合动力汽车20的动作,然后说明管理中心90的动作。
47.各混合动力汽车20的通信装置76在从接通点火开关80到断开点火开关80为止的期间,每隔预定时间tref,将车辆识别编号vin、检测时刻time、发动机22的转速ne、燃料喷射量qf、加速器开度acc以及车速v发送给向管理中心90。车辆识别编号vin是为了识别各个车辆而分配给各个车辆的编号,例如是由字母和数字构成的17个字符的代码。关于检测时刻time,经由hvecu70通过通信而输入由导航装置60接收的gps时间戳tgps。关于发动机22的转速ne、燃料喷射量qf,经由hvecu70通过通信而输入由发动机ecu24运算出的值。关于加速器开度acc,经由hvecu70通过通信而输入由加速踏板位置传感器84检测到的值。关于车速v,经由hvecu70通过通信而输入由车速传感器88检测到的值。
48.另外,在断开点火开关80时,各混合动力汽车20的通信装置76将本车的车辆识别
编号vin、该行程中的行驶距离dtrip、车重mhv发送到管理中心90。关于行驶距离dtrip,经由hvecu70通过通信输入基于来自里程表89的行驶距离d运算出的值。关于车重mhv,通过通信输入作为记载在规格表中的值而存储于hvecu70的未图示的rom的值。
49.接下来,说明管理中心90的动作。首先,说明将来自混合动力汽车20的数据存储到管理中心90的存储装置94的处理,接下来,说明判定电池50的剩余寿命(劣化)的处理。
50.管理中心90的通信装置96接收从各混合动力汽车20每隔预定时间tref发送的车辆识别编号vin、检测时刻time、发动机22的转速ne、燃料喷射量qf、加速器开度acc、车速v,作为时间序列数据集发送到计算机92。通信装置96从各混合动力汽车20接收在断开点火开关80时发送的车辆识别编号vin、行驶距离dtrip以及车重mhv,作为非时间序列数据集发送到计算机92。
51.计算机92在接收到时间序列数据集时,将所接收的时间序列数据集保存于存储装置94。接下来,计算机92在接收到包含相同的车辆识别编号vin的时间序列数据集时,不改写已保存的时间序列数据集,而将接下来接收到的时间序列数据集保存在另外的存储区域。通过这样的处理,在存储装置94中每隔预定时间tref存储时间序列数据集。
52.计算机92在接收到非时间序列数据集时,将所接收的非时间序列数据集保存于存储装置94。非时间序列数据集包括在断开点火开关80时从混合动力汽车20接收到的车辆识别编号vin、行驶距离dtrip以及车重mhv。因而,计算机92判定为在接收到非时间序列数据集的时刻,混合动力汽车20的点火开关80断开,车辆的系统停止。然后,之后,在输入了包含该车辆识别编号vin的时间序列数据集时,判断为与该车辆识别编号vin相对应的混合动力汽车20的点火开关80接通而车辆的系统启动,在将保存于存储装置94的时间序列数据集中的与该车辆识别编号vin相对应的时间序列数据集全部删除的基础上,将所输入的时间序列数据集保存于存储装置94。通过这样的处理,在混合动力汽车20的点火开关80被断开到下一次接通为止的期间,在存储装置94中存储有各混合动力汽车20的1个行程的量的k个(值k为值2以上的自然数)的时间序列数据集。
53.管理中心90的计算机92在接收到包含要判定电池50的剩余寿命(劣化)的对象的混合动力汽车20的车辆识别编号vin的非时间序列数据集时,使用保存于存储装置94的与该车辆识别编号vin相对应的1个行程的量的时间序列数据集和非时间序列数据集来判定电池50的剩余寿命(劣化)。图4是表示利用计算机92执行的剩余寿命判定例程的一例的流程图。本例程在接收到非时间序列数据集时执行。
54.在执行本例程时,管理中心90的计算机92执行按照检测时刻time的从早到晚的顺序从存储装置94输入包含判定电池50的剩余寿命(劣化)的对象的车辆识别编号vin的k个判定用数据的处理(步骤s100)。
55.接下来,将k个判定用数据中的检测时刻time第n早的判定用数据所包含的加速器开度acc设定为参数(第1参数)p1(n)(步骤s110)。n是值为1以上k以下的自然数,设定值1为初始值。因而,在首次被执行时,步骤s110为将k个判定用数据中的最早的判定用数据所包含的加速器开度acc设定为参数p1(1)的处理。如上所述,在hv行驶模式中,控制混合动力汽车20,以使得以使用基于加速器开度acc的要求转矩td*设定的要求功率pd*行驶。因而,参数p1(n)为反映出在对应的检测时刻time的行驶中所要求的要求功率的参数。
56.接下来,利用第n早的判定用数据所包含的燃料喷射量qf、发动机22的转速ne以及
下式(1)运算参数(第2参数)p2(n)(步骤s120)。在式(1)中,“ec”是单位质量的燃料燃烧时所产生的热量(能量)。“theff”是发动机22的热效率。“pemax”是作为能够从发动机22输出的动力的最大值预先通过实验、分析等确定的最高输出。根据式(1),参数p2(n)为反映出在对应的检测时刻time从发动机22输出的动力的参数。
57.p2(n)=qf/ne
·
ec
·
theff/pemax
…
(1)
58.然后,将从参数p1(n)减去参数p2(n)而得到的值设定为参数(第3参数)p3(n)(步骤s130)。参数p1(n)反映出对应的检测时刻time的行驶所要求的要求功率,参数p2(n)反映出对应的检测时刻time的从发动机22输出的动力。因而,从参数p1(n)减去参数p2(n)而得到的参数p3(n)为反映出对应的检测时刻time的马达mg2输入、输出的电力,即从电池50输入、输出的电力的参数。
59.接下来,使用下式(2),把将从第n个输入的判定用数据所包含的车速v减去第(n-1)个输入的判定用数据所包含的车速v(上次v)而得到的减速量(=v-上次v)、马达mg2的再生效率breff与非时间序列数据集所包含的车重mhv相乘得到的值(=mhv
·
(v-上次v)
·
breff)与值0中的较小的值设定为参数p4(n)(步骤s140)。在首次执行步骤s140时,设定值0为上次v的初始值。值(=mhv
·
(v-上次v)
·
breff)表示在减速时通过马达mg2在电池50中再生的电力。根据式(2),关于参数p4(n),在增速时为值0,在减速时设定为通过马达mg2在电池50中再生的电力。因而,参数p4(n)为反映出在对应的检测时刻time向电池50输入的电力的参数。
60.p4(n)=min(mhv
·
(v-上次v)
·
breff,0)
…
(2)
61.接下来,基于k个判定用数据中的检测时刻time第n早的判定用数据所包含的车速v、加速器开度acc以及燃料喷射量qf,判定是否正在执行上述预定充电控制(步骤s150)。在此,在车速v为预定车速vref(例如,65km/小时、70km/小时、75km/小时等)以下、加速器开度acc为0%、并且燃料喷射量qf不是值0时,判定为正在执行上述预定充电控制。
62.当在步骤s150中判定为正在执行上述预定充电控制时,将充电控制次数nch增加值1(步骤s160),进入步骤s170。需要说明的是,在首次执行步骤s160时,将充电控制次数nch设定为值1。当在步骤s150中判定为并非正在执行上述预定充电控制时,不执行步骤s160而进入步骤s170。
63.接下来,判定针对所输入的全部判定用数据的参数p3(n)、p4(n)的设定是否都已完成,即判定作为1个行程中的时间序列的数据的参数p3(1)~(k)、p4(1)~p4(k)的设定是否都已完成(步骤s170)。在没有完成参数p3(1)~(k)、p4(1)~p4(k)的设定时,将n增加值1(将n更新为增加值1后的值)(步骤s180),返回到步骤s110的处理,执行步骤s110以后的步骤。这样,反复进行步骤s110~s180,直到针对所输入的全部判定用数据的参数p3(n)、p4(n)的设定完成为止。因而,充电控制次数nch表示基于判定用数据判定出正在执行上述预定充电控制的次数,与在混合动力汽车20中在该行程中执行预定充电控制的时间相对应。
64.当在步骤s170中完成了参数p3(1)~(k)、p4(1)~p4(k)的设定时,使用参数p3(1)~(k)、p4(1)~p4(k)以及下式(3),将参数p3(n)与参数p4(n)之和在该行程中的积分值除以行驶距离dtrip而得到的值设定为判定值vj(步骤s190)。如上所述,参数p3(n)、p4(n)为反映出在对应的检测时刻time从电池50输出的电力(正值)、在减速时为向电池50输入的电力(值0以下)的参数。因而,判定值vj为反映出在该行程中每单位行驶距离向电池50输入、
输出的电力的累积值的值。
65.vj=σ(p3(n)+p4(n))/dtrip
…
(3)
66.接下来,对将充电控制次数nch除以判定用数据的个数k而得到的值乘以值100来设定充电频度fch(步骤s200)。构成1个判定用数据的车速v等数据是每隔预定时间从混合动力汽车20发送的数据,因此,判定用数据的个数k与混合动力汽车20在该行程的所需时间相对应。因而,充电频度fch与在该行程中执行预定充电控制的时间相对于该行程的所需时间的比例相对应。
67.这样设定判定值vj、充电频度fch,使用判定值vj、充电频度fch以及预先存储于未图示的rom的剩余寿命设定用图,判定电池50的剩余寿命(步骤s210)。图5是表示剩余寿命设定用图的一例的说明图。在图5中,电池50的剩余寿命被设定为:判定值vj较大时,与判定值vj较小时相比,剩余寿命变短,在充电频度fch较大时,与充电频度fch较小时相比,剩余寿命变短。这是基于:电池50的剩余寿命与向电池50输入、输出的电力的累积值和充电频度fch强相关,在向电池50输入、输出的电力的累积值较大时,与该电力的累积值较小时相比,电池50的劣化的发展更快,剩余寿命变短,在充电频度fch较大时,电池50已经劣化,蓄电比例soc降低。关于参数p3(1)~p3(k)、p4(1)~p4(k),使用发动机22的转速ne、燃料喷射量qf、加速器开度acc以及车速v来设定。另外,关于充电控制次数nch,在基于车速v、加速器开度acc以及燃料喷射量qf判定为正在执行充电控制过程中时增加值1,因此可以说是基于车速v、加速器开度acc以及燃料喷射量qf设定的。也就是说,基于车速v、加速器开度acc以及燃料喷射量qf来设定充电频度fch。如上所述,发动机22的转速ne、燃料喷射量qf、加速器开度acc、车速v均是在hv行驶模式、ev行驶模式下的发动机22、马达mg1、mg2的控制(行驶控制)所使用的用户操作量或者控制量。因而,不用追加用于判定电池50的剩余寿命的特别的装置,能够使用混合动力汽车20的控制所使用的用户操作量、控制量而精度良好地判定电池50的劣化。
68.另外,在电池50的剩余寿命(劣化)的判定中使用1个行程的量的判定用数据集、参数p3(1)~p3(k)、p4(1)~p4(k)即可,因此与将从制造混合动力汽车20后首次系统启动到当前的期间为止的判定用数据集、参数p3、p4全部存储起来的情况相比,能够减小存储装置94的存储容量。因而,即使在不具有大容量的存储装置的情况下,也能够判定二次电池的劣化。
69.发明人们发现,在由镍氢二次电池构成电池50的情况下,在使用时间超过某个时间时,劣化急剧发展,镍氢二次电池的内部电阻值急剧上升,因此难以通过内部电阻值预测劣化的发展。在实施例中,使用混合动力汽车20的行驶控制所使用的用户操作量、控制量来判定电池50的劣化,因此,即使在由镍氢二次电池构成电池50的情况下也能够精度良好地判定劣化。
70.在这样判定电池50的剩余寿命(劣化)时,将与判定结果对应的车辆识别编号vin发送到通信装置96(步骤s220)。接收到判定结果和车辆识别编号vin的通信装置96向与所接收的车辆识别编号vin相对应的混合动力汽车20发送判定结果。接收到判定结果的混合动力汽车20将判定结果显示在车内的未图示的显示器上。由此,能够向用户通知电池50的劣化,在电池50的剩余寿命较短时提醒用户更换电池50。
71.根据具备以上说明的实施例的二次电池的劣化判定装置的车辆诊断系统10,基于
车速v、加速器开度acc以及燃料喷射量qf判定是否正在执行预定充电控制,判定为在充电控制次数nch除以判定用数据的个数k得到的值乘以值100而得到的充电频度fch较大时,与该充电频度fch较小时相比,电池50的劣化加剧,由此能够基于在混合动力车辆中执行的控制来判定二次电池的劣化。
72.另外,判定为在参数p3(n)在相应行程内的时间序列的数据的累积值除以该行程中的行驶距离dtrip得到的值较大时,与该值较小相比,劣化的发展更快,由此能够更适当地判定电池的劣化,其中,参数p3(n)为基于加速器开度acc的参数p1(n)与基于燃料喷射量qf的参数p2(n)之差。
73.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,在图4的剩余寿命判定例程的步骤s150中基于车速v、加速器开度acc以及燃料喷射量qf判定是否正在执行预定充电控制。然而,也可以代替燃料喷射量qf而使用发动机22的转速ne。在该情况下,在车速v是预定车速vref以下、加速器开度acc是0%、并且发动机22的转速ne比怠速转速nidl高时,判定为正在执行预定充电控制即可。
74.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,在图4的剩余寿命判定例程的步骤s200中,将充电控制次数nch除以判定用数据的个数k得到的值乘以值100来设定充电频度fch。然而,也可以将充电频度fch设定为将充电控制次数nch除以判定用数据的个数k得到的值;或者测量在该行程中执行预定充电控制的时间和该行程的所需时间,设定为将在该行程中执行预定充电控制的时间除以该行程的所需时间得到的值(执行预定充电控制的时间相对于该行程的所需时间的比率)。
75.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,在图4的剩余寿命判定例程的步骤s110中将加速器开度acc设定为参数p1(n)。然而,也可以将驱动轴36的转速nd乘以基于加速器开度acc和车速v的要求转矩td*而得到的要求功率pd*设定为参数p1(n)。在该情况下,在步骤s120中,也可以代替式(1)而使用下式(4)。
76.p2(n)=qf/ne
·
ec
·
theff/pemax
…
(4)
77.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,在图4的剩余寿命判定例程的步骤s130、s140中设定参数p3(1)~p3(k)、p4(1)~p4(k),在步骤s190中使用所设定的参数p3(1)~p3(k)、p4(1)~p4(k)来设定判定值vj。然而,也可以不执行步骤s140,而仅使用参数p3(1)~p3(k)来设定判定值vj。在该情况下,在步骤s190中,代替上述式(3),使用下式(5)即可。
78.vj=σp3(n)/dtrip
…
(5)
79.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,基于参数p3(n)、p4(n)的1个行程的量的时间序列的数据即参数p3(1)~p3(k)、p4(1)~p4(k)判定电池50的剩余寿命(劣化)。然而,收集参数p3(n)、p4(n)的时间序列数据的期间并不限定于1个行程,也可以设为2个行程以上,适当决定即可。例如,在将各混合动力汽车20作为出租车运行时,也可以基于参数p3(n)、p4(n)的该出租车的1天的运行时间量的时间序列的数据来判定电池50的剩余寿命(劣化)。
80.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,执行步骤s110~s140、s190来运算判定值vj,在步骤s210中使用判定值vj和充电频度fch判定剩余寿命。然而,也可以不执行步骤s110~s140、s190,而在步骤s210中仅使用充电频度fch来判定剩余
寿命。在该情况下,在充电频度fch较高时,与充电频度fch较低时相比,劣化发展了,因此也可以判定为在充电频度fch较高时,与充电频度fch较低时相比,剩余寿命较短。
81.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,管理中心90的计算机92执行图4的剩余寿命判定例程。然而,也可以由混合动力汽车20的hvecu70执行图4的剩余寿命判定例程的一部分或者全部处理。
82.在具备实施例的二次电池的劣化判定装置的车辆诊断系统10中,将电池50构成为镍氢二次电池。然而,电池50也可以为二次电池,例如也可以为锂离子电池。
83.在实施例中,将本发明的二次电池的劣化判定装置搭载于管理中心90。然而,也可以将本发明的二次电池的劣化判定装置搭载于混合动力汽车20。
84.在实施例中,例示了将本发明的二次电池的劣化判定装置应用于具备发动机22、马达mg1、mg2、行星齿轮30的混合动力汽车20的情况。然而,并不限定于这样构成的混合动力汽车20,只要是具备输出行驶用的动力的发动机、输出行驶用的动力的马达以及与马达交换电力的二次电池的混合动力汽车,也可以应用于不同结构的混合动力汽车20。另外,也可以应用于列车、建筑机械等与汽车不同的车辆。
85.说明实施例的主要的要素与用于解决问题的方案部分所记载的发明的主要的要素的对应关系。在实施例中,发动机22是“发动机”的一例,马达mg2是“马达”是一例,电池50是“二次电池”的一例,发动机ecu24、马达ecu40以及hvecu70是“控制装置”的一例,混合动力汽车20是“混合动力车辆”的一例,管理中心90的计算机92是“二次电池的劣化判定装置”的一例。
86.需要说明的是,实施例是用于具体地说明用于解决问题的方案部分所记载的用于实施发明的方式的一例,因此实施例的主要的要素与用于解决问题的方案部分所记载的发明的主要的要素的对应关系并不限定用于解决问题的方案部分所记载的发明的要素。即,用于解决问题的方案部分所记载的关于发明的解释应基于该部分的记载来进行,实施例只不过是用于解决问题的方案部分所记载的发明的具体的一例。
87.以上,使用实施例说明了用于实施本发明的方式,但本发明不受这样的实施例的任何限定,在不脱离本发明的要旨的范围内,当然能够以各种方式来实施。
88.本发明能够利用于二次电池的劣化判定装置的制造产业等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1