一种智能交通车辆救援装置
1.本发明涉及一种救援装置,尤其涉及一种智能交通车辆救援装置。
背景技术:
2.我国交通事故频发,当车辆发生交通事故冲下斜坡时,就需要依靠大型机械将事故车辆拉上来,目前对于车辆的救援一般是使用现有的起吊装置,该装置包括:支撑架、以及安装在所述支撑架上的吊耳单元和提升单元;所述吊耳单元带有滑轮,并通过跨过所述滑轮的吊索与所述提单元相连接;所述提升单元通过齿轮传动方式带动所述吊索绕所述滑轮转动,以提升或降落起吊物;目前交通救援的起吊装置在工作过程中,其底部的支撑稳固性较差,在起吊时,不能保证很高的稳定度,如果发生翻车,就会造成不必要的经济损失。
3.因此,鉴于上述问题提供一种稳固性好且降低经济损失的智能交通车辆救援装置。
技术实现要素:
4.为了克服现有的起吊装置稳固性较差,如果发生翻车,就会造成不必要的经济损失的缺点,本发明的技术问题:提供一种稳固性好且降低经济损失的智能交通车辆救援装置。
5.本发明的技术实施方案是:一种智能交通车辆救援装置,包括有第一安装架、安装板、第一接触开关、第一固定柱、第一转板、第一托板、第二托板、第二固定柱、第一电动推杆、第三固定柱、伸缩机构和防护机构,安装板前后对称设有三个第一安装架,安装板顶部中间设有第一接触开关,安装板顶部右侧设有第一固定柱,第一固定柱上转动式设有第一转板,第一转板顶部设有第一托板,安装板左侧设有第二托板,第一托板左侧与第二托板接触,安装板的顶部左侧设有第二固定柱,第二固定柱上转动式设有第一电动推杆,第一托板底部中间设有与第一电动推杆伸缩杆转动式连接的第三固定柱,第一托板上设有伸缩机构,伸缩机构上设有防护机构。
6.进一步的是,伸缩机构包括有第四固定柱、放置框、第二安装架、第三托板、第一固定杆、第二转板、伸缩柱、把手、滑动杆和滑块,第一托板右侧设有四个第四固定柱,第四固定柱之间设有放置框,放置框右侧设有第二安装架,第二安装架内侧设有两个第三托板,第二安装架上部右侧设有第一固定杆,第一固定杆中部转动式设有第二转板,第二转板上设有与第三托板接触的伸缩柱,伸缩柱的伸缩端内侧滑动式设有滑动套,滑动套内侧滑动式设有滑动杆,伸缩柱的固定端、伸缩柱的伸缩端、滑动套和滑动杆均前后对称设有把手,伸缩柱的伸缩端、滑动套和滑动杆顶部右侧均设有滑块。
7.进一步的是,防护机构包括有第二固定杆、固定板、防护板、第一滑杆和直线弹簧,第二安装架右侧前后对称设有第二固定杆,第二固定杆上部之间设有固定板,固定板上滑动式设有四个第一滑杆,第一滑杆顶部之间连接有防护板,四个第一滑杆均与固定板之间连接有直线弹簧,直线弹簧均套在同侧的第一滑杆上。
8.进一步的是,还包括有定位机构,定位机构包括有压块、压力传感器、第一固定框、第二电动推杆、第二固定框、驱动电机、钻头、第二滑杆和滑套,第一转板右侧设有压块,安装板右侧设有压力传感器,放置框内部左侧设有第一固定框,第一固定框内侧设有第二电动推杆,第二电动推杆伸缩杆右侧设有第二固定框,第二固定框内部设有驱动电机,驱动电机输出轴右侧设有用于定位和固定智能交通车辆救援装置的钻头,放置框内部上下对称设有第二滑杆,第二滑杆上均滑动式设有与第二固定框连接的滑套。
9.进一步的是,还包括有收卷机构,收卷机构包括有导向轮、第五固定柱、双轴电机、第一绕线轮、第一钢丝绳、第一距离传感器、感应杆和第二距离传感器,放置框顶部左侧设有导向轮,放置框顶部左侧设有两个第五固定柱,放置框顶部左侧设有位于两个第五固定柱中间的双轴电机,第五固定柱上部均转动式设有第一绕线轮,第一绕线轮均与双轴电机两侧的输出轴连接,第一绕线轮均与左侧的两个把手之间连接有第一钢丝绳,第一钢丝绳均绕在同侧的第一绕线轮上,前侧的第五固定柱顶部设有第一距离传感器,下侧的滑套前侧设有感应杆,放置框内部右侧设有第二距离传感器。
10.进一步的是,还包括有拉取机构,拉取机构包括有第二接触开关、第六固定柱、第七固定柱、减速电机、第二绕线轮、第二钢丝绳、第三安装架、滑轮、限位框、挂钩和磁铁,安装板顶部左侧设有第二接触开关,安装板顶部左前侧设有第六固定柱,安装板顶部左后侧设有第七固定柱,第六固定柱顶部设有减速电机,第七固定柱上部后侧转动式设有与减速电机输出轴连接的第二绕线轮,第二绕线轮上绕有第二钢丝绳,放置框左侧设有第三安装架,第三安装架左侧转动式设有滑轮,第二钢丝绳绕在滑轮上,第三安装架左侧设有限位框,第二钢丝绳另一端连接有挂钩,滑动杆顶部设有与挂钩相吸的磁铁。
11.进一步的是,还包括有固定机构,固定机构包括有第八固定柱、弧形滑杆和弧状弹簧,滑动杆左侧前后对称设有第八固定柱,第八固定柱上均滑动式设有用于卡紧挂钩的弧形滑杆,两个弧形滑杆相接触,弧形滑杆均与同侧的第八固定柱之间连接有弧状弹簧。
12.进一步的是,还包括有控制箱,安装板右侧设有控制箱,控制箱位于第一接触开关右侧,控制箱内安装有开关电源、电源模块和控制模块,开关电源为整个智能交通车辆救援装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;压力传感器、第一距离传感器、第二距离传感器、第一接触开关和第二接触开关都与控制模块通过电性连接;第一电动推杆、第二电动推杆和驱动电机都与控制模块通过继电器控制模块连接;减速电机和双轴电机都与控制模块通过直流电机正反转模块连接。
13.本发明具有如下优点:1、由于重力伸缩柱的伸缩端、滑套、滑动杆伸长形成梯子,便于跌落至斜坡下方的人握住把手爬上坡;2、钻头转动的同时向下移动钻入地面,进而对安装本装置的大型车进行定位和固定,避免安装本装置的大型车发生翻车,造成不必要的经济损失;3、当双轴电机两侧的输出轴带动第一绕线轮反转时,进而通过第一钢丝绳带动第二转板、伸缩柱、滑套、滑动杆和把手复位,如此无需人工借助工具反转复位第二转板,从而减少人工操作的麻烦;4、弧形滑杆将挂钩卡住,避免挂钩从磁铁上脱落下来,挂钩没有了束缚容易使得车子在开动时挂钩碰撞损坏其他部件。
附图说明
14.图1为本发明的第一种立体结构示意图。
15.图2为本发明的第二种立体结构示意图。
16.图3为本发明的部分立体结构示意图。
17.图4为本发明伸缩机构第一种部分立体结构示意图。
18.图5为本发明伸缩机构第二种部分立体结构示意图。
19.图6为本发明防护机构立体结构示意图。
20.图7为本发明定位机构第一种部分立体结构示意图。
21.图8为本发明定位机构第二种部分立体结构示意图。
22.图9为本发明收卷机构第一种部分立体结构示意图。
23.图10为本发明a处放大立体结构示意图。
24.图11为本发明收卷机构第二种部分立体结构示意图。
25.图12为本发明拉取机构立体结构示意图。
26.图13为本发明b处放大立体结构示意图。
27.图14为本发明c处放大立体结构示意图。
28.图15为本发明固定机构立体结构示意图。
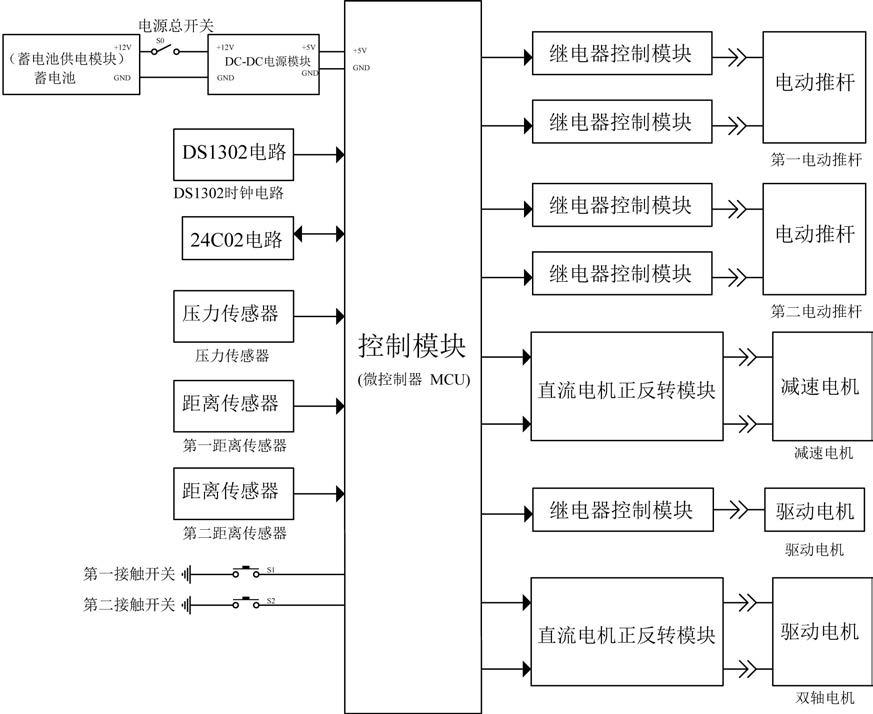
29.图16为本发明的电路框图。
30.图17为本发明的电路原理图。
31.以上附图中:1:第一安装架,2:安装板,3:第一接触开关,4:控制箱,5:第一固定柱,6:第一转板,7:第一托板,71:第二托板,8:第二固定柱,9:第一电动推杆,10:第三固定柱,11:伸缩机构,111:第四固定柱,112:放置框,113:第二安装架,114:第三托板,115:第一固定杆,116:第二转板,117:伸缩柱,118:把手,119:滑动杆,1110:滑块,12:防护机构,121:第二固定杆,122:固定板,123:防护板,124:第一滑杆,125:直线弹簧,13:定位机构,131:压块,132:压力传感器,133:第一固定框,134:第二电动推杆,135:第二固定框,136:驱动电机,137:钻头,138:第二滑杆,139:滑套,14:收卷机构,141:导向轮,142:第五固定柱,143:双轴电机,144:第一绕线轮,145:第一钢丝绳,146:第一距离传感器,147:感应杆,148:第二距离传感器,15:拉取机构,151:第二接触开关,152:第六固定柱,153:第七固定柱,154:减速电机,155:第二绕线轮,156:第二钢丝绳,157:第三安装架,158:滑轮,159:限位框,1510:挂钩,1511:磁铁,16:固定机构,161:第八固定柱,162:弧形滑杆,163:弧状弹簧。
具体实施方式
32.在本文中提及实施例意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
33.实施例1一种智能交通车辆救援装置,如图1
‑
17所示,包括有第一安装架1、安装板2、第一接触开关3、第一固定柱5、第一转板6、第一托板7、第二托板71、第二固定柱8、第一电动推杆9、第三固定柱10、伸缩机构11和防护机构12,安装板2前后对称设有三个第一安装架1,安装
板2顶部中间设有第一接触开关3,安装板2顶部右侧设有第一固定柱5,第一固定柱5上转动式设有第一转板6,第一转板6顶部设有第一托板7,安装板2左侧设有第二托板71,第一托板7左侧与第二托板71接触,安装板2的顶部左侧设有第二固定柱8,第二固定柱8上转动式设有第一电动推杆9,第一托板7底部中间设有第三固定柱10,第三固定柱10与第一电动推杆9伸缩杆转动式连接,第一托板7上设有伸缩机构11,伸缩机构11上设有防护机构12。
34.伸缩机构11包括有第四固定柱111、放置框112、第二安装架113、第三托板114、第一固定杆115、第二转板116、伸缩柱117、把手118、滑动杆119和滑块1110,第一托板7顶部右侧设有四个第四固定柱111,第四固定柱111之间设有放置框112,放置框112的顶部右侧设有第二安装架113,第二安装架113内侧设有两个第三托板114,第二安装架113上部右侧设有第一固定杆115,第一固定杆115中部转动式设有第二转板116,第二转板116上设有伸缩柱117,伸缩柱117与第三托板114接触,伸缩柱117的伸缩端内侧滑动式设有滑动套,滑动套内侧滑动式设有滑动杆119,伸缩柱117的固定端、伸缩柱117的伸缩端、滑动套和滑动杆119均前后对称设有把手118,伸缩柱117的伸缩端、滑动套和滑动杆119顶部右侧均设有滑块1110。
35.防护机构12包括有第二固定杆121、固定板122、防护板123、第一滑杆124和直线弹簧125,第二安装架113右侧前后对称设有第二固定杆121,第二固定杆121上部之间设有固定板122,固定板122上滑动式设有四个第一滑杆124,第一滑杆124顶部之间连接有防护板123,四个第一滑杆124均与固定板122之间连接有直线弹簧125,直线弹簧125均套在同侧的第一滑杆124上。
36.首先将本装置安装在大型车上,当事故发生时有车辆冲下斜坡,就可将安装本装置的大型车开至现场,按下电源总开关将本装置上电,随后按下第一接触开关3,控制模块控制第一电动推杆9伸缩杆伸长十秒后停止,第一电动推杆9伸缩杆伸长带动第三固定柱10向右移动,进而带动第一托板7和第一转板6正转立起来后停止,第一托板7带动第四固定柱111、放置框112、第二安装架113、第三托板114、第一固定杆115、第二转板116、伸缩柱117、把手118、滑动杆119、滑块1110、第二固定杆121、固定板122、防护板123、第一滑杆124和直线弹簧125正转,随后第二转板116正转带动伸缩柱117正转与第三托板114分离,当伸缩柱117正转与防护板123接触,进而向下挤压防护板123和第一滑杆124,直线弹簧125被压缩起缓冲,伸缩柱117带动滑动套、滑动杆119和把手118正转,由于重力伸缩柱117的伸缩端、滑动套、滑动杆119伸长形成梯子,便于跌落至斜坡下方的人握住把手118爬上坡,救援完毕后,人们按下第一接触开关3,控制模块控制第一电动推杆9伸缩杆收缩十秒后关闭,第一电动推杆9收缩带动第三固定柱10向左移动,进而带动第一托板7和第一转板6反转复位,第一托板7带动第四固定柱111、放置框112、第二安装架113、第三托板114、第一固定杆115、第二转板116、伸缩柱117、把手118、滑动杆119、滑块1110、第二固定杆121、固定板122、防护板123、第一滑杆124和直线弹簧125反转,随后人工借助工具反转复位第二转板116,第二转板116带动伸缩柱117与防护板123分离,进而在直线弹簧125复位的作用下带动防护板123和第一滑杆124复位,同时第二转板116带动伸缩柱117与第三托板114接触,进而带动滑动套、滑动杆119和把手118反转,由于重力伸缩柱117的伸缩端、滑动套、滑动杆119和把手118收缩复位,不需要使用本装置时,按下电源总开关将本装置断电即可。
37.还包括有定位机构13,定位机构13包括有压块131、压力传感器132、第一固定框
133、第二电动推杆134、第二固定框135、驱动电机136、钻头137、第二滑杆138和滑套139,第一转板6右侧设有压块131,安装板2右侧设有压力传感器132,放置框112内部左侧设有第一固定框133,第一固定框133内侧设有第二电动推杆134,第二电动推杆134伸缩杆右侧设有第二固定框135,第二固定框135内部设有驱动电机136,驱动电机136输出轴右侧设有钻头137,放置框112内部上下对称设有第二滑杆138,第二滑杆138上均滑动式设有滑套139,滑套139右侧均与第二固定框135连接。
38.当第一转板6正转时,进而带动压块131正转,当压块131与压力传感器132接触时,进而挤压压力传感器132,压力传感器132检测到压力达到预设值,控制模块控制第二电动推杆134伸缩杆伸长1分钟后停止,第二电动推杆134伸缩杆伸长带动第二固定框135和滑套139向下移动,进而带动驱动电机136和钻头137向下移动,使得钻头137与地面接触,同时控制模块控制驱动电机136启动1分钟后关闭,驱动电机136输出轴带动钻头137转动,使得钻头137向下移动钻入地面,进而对整个装置进行定位和固定,人们按下第一接触开关3,控制模块控制驱动电机136关闭,同时控制模块控制第二电动推杆134伸缩杆收缩1分钟后关闭,第二电动推杆134伸缩杆收缩带动第二固定框135和滑套139向上移动,进而带动驱动电机136和钻头137向上移动复位。
39.还包括有收卷机构14,收卷机构14包括有导向轮141、第五固定柱142、双轴电机143、第一绕线轮144、第一钢丝绳145、第一距离传感器146、感应杆147和第二距离传感器148,放置框112顶部左侧设有导向轮141,放置框112顶部左侧设有两个第五固定柱142,放置框112顶部左侧设有双轴电机143,双轴电机143位于两个第五固定柱142中间,第五固定柱142上部均转动式设有第一绕线轮144,两个第一绕线轮144分别与双轴电机143两侧的输出轴连接,第一绕线轮144均与滑动杆119上的两个把手118之间连接有第一钢丝绳145,前侧的第五固定柱142顶部设有第一距离传感器146,下侧的滑套139前侧设有感应杆147,放置框112内部右侧设有第二距离传感器148。
40.当下侧的滑套139向下移动时,进而带动感应杆147向下移动,当感应杆147靠近第二距离传感器148时,第二距离传感器148检测到与感应杆147之间的距离达到预设值,控制模块控制双轴电机143两侧的输出轴正转,双轴电机143两侧的输出轴带动第一绕线轮144转动,放线第一钢丝绳145,使得第二转板116正转带动伸缩柱117、滑动套、滑动杆119和把手118正转,第一钢丝绳145随之被拉直,同时绕在第一绕线轮144上的第一钢丝绳145越来越少进而靠近第一距离传感器146,第一距离传感器146检测到与第一钢丝绳145之间距离达到预设值,控制模块控制双轴电机143停止;当人们按下第一接触开关3时,控制模块控制双轴电机143两侧的输出轴反转,双轴电机143两侧的输出轴带动第一绕线轮144反转,进而通过第一钢丝绳145带动第二转板116、伸缩柱117、滑动套、滑动杆119和把手118复位,如此无需人工借助工具反转复位第二转板116,同时绕在第一绕线轮144上的第一钢丝绳145越来越多远离第一距离传感器146,第一距离传感器146检测到与第一钢丝绳145之间距离回到初设值,控制模块控制双轴电机143关闭。
41.还包括有拉取机构15,拉取机构15包括有第二接触开关151、第六固定柱152、第七固定柱153、减速电机154、第二绕线轮155、第二钢丝绳156、第三安装架157、滑轮158、限位框159、挂钩1510和磁铁1511,安装板2顶部左侧设有第二接触开关151,安装板2顶部左前侧设有第六固定柱152,安装板2顶部左后侧设有第七固定柱153,第六固定柱152顶部设有减
速电机154,第七固定柱153上部后侧转动式设有第二绕线轮155,第二绕线轮155前侧与减速电机154输出轴连接,第二绕线轮155上绕有第二钢丝绳156,放置框112左侧设有第三安装架157,第三安装架157左侧转动式设有滑轮158,第二钢丝绳156绕在滑轮158上,第三安装架157左侧设有限位框159,第二钢丝绳156另一端连接有挂钩1510,滑动杆119顶部设有磁铁1511,磁铁1511与挂钩1510相吸。
42.当感应杆147靠近第二距离传感器148时,第二距离传感器148检测到与感应杆147之间的距离达到预设值,控制模块控制减速电机154输出轴反转,减速电机154输出轴反转带动第二绕线轮155反转,放松第二钢丝绳156,使得滑动杆119正转通过磁铁1511带动挂钩1510正转,当第一距离传感器146检测到与第一钢丝绳145之间距离达到预设值时,控制模块控制减速电机154停止,随后人们将挂钩1510取下来挂在事故车辆上,随后按下第二接触开关151,控制模块控制减速电机154输出轴正转,减速电机154输出轴正转带动第二绕线轮155正转,进而通过第二钢丝绳156和挂钩1510将事故车辆拉上来,事故车辆拉上来后,按下第二接触开关151,控制模块控制减速电机154关闭,随后取下挂钩1510,将挂钩1510复位吸附在磁铁1511上。
43.还包括有固定机构16,固定机构16包括有第八固定柱161、弧形滑杆162和弧状弹簧163,滑动杆119的左侧前后对称设有第八固定柱161,第八固定柱161上均滑动式设有弧形滑杆162,两个弧形滑杆162相接触,弧形滑杆162均与同侧的第八固定柱161之间连接有弧状弹簧163。
44.当人们需要取下挂钩1510时,向外移动弧形滑杆162,使得两个弧形滑杆162分离,弧状弹簧163被压缩,然后将挂钩1510取下来,再松开弧形滑杆162,在弧状弹簧163复位的作用下带动弧形滑杆162复位,需要复位挂钩1510时,向外移动弧形滑杆162,使得两个弧形滑杆162分离,弧状弹簧163被压缩,然后将复位挂钩1510吸附在磁铁1511上,再松开弧形滑杆162,在弧状弹簧163复位的作用下带动弧形滑杆162复位将挂钩1510卡住,避免挂钩1510从磁铁1511上脱落下来,挂钩1510没有了束缚使得车子在开动时挂钩1510碰撞损坏其他部件。
45.还包括有控制箱4,安装板2的顶部右侧设有控制箱4,控制箱4位于第一接触开关3右侧,控制箱4内安装有开关电源、电源模块和控制模块,开关电源为整个智能交通车辆救援装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;压力传感器132、第一距离传感器146、第二距离传感器148、第一接触开关3和第二接触开关151都与控制模块通过电性连接;第一电动推杆9、第二电动推杆134和驱动电机136都与控制模块通过继电器控制模块连接;减速电机154和双轴电机143都与控制模块通过直流电机正反转模块连接。
46.最后所应当说明的是,以上实施例仅用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1