评估用于控制至少部分自动化的移动平台的方法的方法、评估设备、计算机程序及存储介质与流程
1.本发明涉及一种用于评估用于控制至少部分自动化的移动平台的方法的方法。
背景技术:
2.驾驶的自动化随着车辆配备有越来越广泛和性能卓越的用于周围环境检测的传感器系统而出现。将传感器数据融合至周围环境模型以表示车辆的周围环境。对周围环境模型的范围和质量的要求又取决于其上所实现的驾驶功能。在无人驾驶车辆中,基于周围环境模型例如作出完全的驾驶决策,并相应地操控致动器。
3.道路交通中周围环境条件的开放性(open context natur)是对辅助系统开发和(部分)自动化驾驶功能开发的重大挑战。在开发系统以表示周围环境时,通常不能完全预见如下情况:道路拓扑、交通流、天气、照明等的哪些组合在现实中出现,以及这些组合中的哪些组合对算法(例如用于识别交通牌的算法或行为规划的算法)特别具有挑战性。这不仅适用于经典的基于模型的方法,而且适用于基于数据的方法。
4.通过引入专家知识或适当地选择训练数据,尝试如此设计周围环境的表示,使得其在期望的周围环境中足够准确地秒速周围环境中的重要相关的对象,或可以从中足够准确地推导出行为规划。然而,在训练中或在设计中,可能不能考虑到周围环境的对于实际运行而言重要相关的状况或场景,或者缺少对于周围环境的一定状况或场景而言合适的训练数据。
技术实现要素:
5.根据本发明的方面,提出一种用于评估用于控制至少部分自动化的移动平台的第一方法的方法、一种用于提供控制信号的方法、一种评估设备、一种计算机程序和一种机器可读的存储介质。有利的构型是以下描述的主题。
6.在本发明的整个描述中,方法步骤的顺序如此示出,使得该方法易于理解。但是,本领域技术人员将看出,这些方法步骤中的多个方法步骤也能够以不同的顺序执行并且导致相同的或相应的结果。在这个意义上,方法步骤的顺序可以相应地发生改变。若干特征设有计数词,以便改善可读性或使分配更加明确,但是这并不隐含确定特征的存在。
7.根据本发明的一个方面,提出一种用于评估用于在移动平台的周围环境中控制至少部分自动化的移动平台的第一方法的方法,该方法具有以下步骤:
8.在一个步骤中,借助第一方法针对周围环境的场景确定控制动作。在另一步骤中,确定借助第一方法确定控制动作的置信值。在另一步骤中,如果所确定的置信值小于信任值,则确定移动平台的周围环境的场景的表示,以便以该场景评估第一方法。
9.移动平台可以理解为移动的、至少部分自动化的系统,和/或驾驶员辅助系统。一个示例可以是至少部分自动化的车辆或具有驾驶员辅助系统的车辆。这就是说,就此而论,至少部分自动化的系统包含关于至少部分自动化的功能性的移动平台,但是移动平台也包
含包括驾驶员辅助系统在内的车辆和其他移动机器。
10.评估第一方法的概念应作广义解释,并且包括对第一方法的评价、分析和改善。
11.移动平台的周围环境的场景及其表示尤其包括对象及其相互位置和/或定向或其速度,这尤其是对于评估第一方法是重要相关的。例如,距自车辆(egofahrzeug)较大距离处的车辆(在该车辆中,在测试模式下使用第一方法)对于控制动作(例如变道)而言不是那么重要相关。在此,场景还包括位置说明,例如gps位置。例如,通过位置说明可以检查,在一定的交通技术周围环境(例如高速公路和/或隧道和/或交叉口)中的场景下控制动作是否由第一方法以足够高的置信值确定。
12.附加地或替代地,可以针对该方法以数字化的形式提供具有车道信息和/或交通牌的地图,和/或可以通过该方法生成这种数字地图。然后,该方法还可以设置,将移动平台的位置和/或重要相关对象的相应位置分配给数字地图的地理位置。
13.有利地,该方法可以用于进行评估,以便发布(freizugeben)该方法用于实际使用。
14.尤其当用于控制的第一方法涉及用于行为规划的方法时,可以借助该方法评估第一方法。因为在用于行为规划的方法中存在如下问题:在与例如已建立的行为规划方法进行比较时,可以容易地确定相对于当前状况的差别。如此,例如,相对于已建立的用于行为规划的方法,第一方法可能提出向左变道,而不是直行。由于第一方法所提出的动作可能在未来导致影响,因此这种即时确定的差别不足以用于评估第一方法,因为这种瞬时的差别不允许对状况在未来的进一步发展做出任何结论。
15.例如,不能判定在变道的情况下状况将如何发展,即该状况例如是有利的还是甚至导致事故。
16.在此描述的方法有利地允许第一方法的评估,尤其是当借助多个车辆执行该方法时。如果尤其在使用移动平台的情况下在测试模式或阴影模式(shadow mode)下运行第一方法,则因此能够加速第一方法的开发,并且也支持发布论证(freigabeargumentation)。
17.尤其能够借助该方法评估用于进行控制的第一方法或功能,其结果或动作可能在未来产生影响。
18.在该方法中,尤其能够在测试模式或阴影模式下运行第一方法,以便收集关于如下的信息:在周围环境的表示的哪些场景中或在哪些状况下,第一方法(例如行为规划器)以低的置信度确定动作(例如控制动作),以便例如针对这种场景改善第一方法。
19.在此,测试模式或阴影模式可以是在被动模式下运行的第一方法,向其提供来自移动平台的传感器系统的输入数据或进一步处理的输入数据,其中,在测试模式或阴影模式下,该方法不用于控制或不用于操控移动平台的执行装置。
20.例如,可以实现改善,其方式为:在置于基于数据的函数上的第一方法中,将如下这些场景纳入到函数的数据结构中:在这些场景中,控制动作是以低的置信值所确定的。
21.如果例如第一方法的这种基于数据的函数从未以密集的交通进行训练,但是在现实中面临交通拥堵的场景,则这解释用于确定控制动作的低置信值。借助所描述的用于进行评估的方法,能够辨识出这些场景,以便评估或(在必要时)改善相应的第一方法。为此,尤其可以从大量这种场景中抽象出相应的场景,并且在第一方法的进一步开发方面(例如在行为策略(verhaltenspolicy)的训练中)进行考虑。
22.换句话说,借助这种方法能够评估用于确定控制动作的第一方法,其方式为:借助用于确定置信值的方法确定控制动作的相应置信值,并且在测试模式下收集如下场景的表示:在这些场景中,控制动作是以小于信任值的置信值所确定的。
23.例如可以确定置信值,其中,用于确定置信值的方法能够识别该置信值关于所施加的输入数据(即周围环境的表示)是处于外推范围内(即,从训练或手动规范阶段中未知足够相似的场景或状况)还是处于内插范围内(这意味着,从开发阶段中已知足够相似的场景或状况)。
24.可以在各个移动平台上例如基于该置信估计来选择多个这种场景,以便将待传输的场景表示和所属的控制动作或置信值的数量最小化,并且无线地和/或有线地/或与数据载体结合地(gebunden)传输到用于进行评估的中央机构(zentrale)(例如云),以便对其进行评估。
25.为此,可以将基于专家知识地和/或借助训练数据基于数据地实现的第一方法在训练模式或阴影模式运行中引入到车辆或车队中。
26.相应于力争达到的评估,可以针对场景的传输定义过滤标准,这些过滤标准例如描述在训练数据中不存在足够好的对应的场景或状况。例如可以确定自车辆的和周围交通的呈位置数据(gps位置)和/或行驶轨迹形式的场景。如此过滤的场景可以连同其他特征参量(例如相应的置信值和/或控制动作)传输到用于进行评估的中央机构(云)。
27.例如可以利用如此收集的场景表示,以便关于基于专家知识的经典方法定义明确的规则:在这种(至今未知的)状况下应如何进行处理。替代或附加地,可以将相应的场景表示在模拟中重建和/或提供用于基于数据的方法的训练。然后,第一方法的改善版本可以再次在训练模式下在车辆的车队上推广(ausgerollt)以进行进一步评估,以便在可靠性足够的情况下y提供重要的论据用于第一方法的发布和/或在评估结果不够好的情况下再次执行该方法。
28.替代地或附加地,第一方法也可以在未在测试模式下运行的情况下离线分析。为此,可以为移动平台提高(erhoben)和存储不同可能周围环境中的不同场景的大数据量。在此重要的是充分考虑现实中发生的场景或状况。
29.在测试模式或阴影模式下使用第一方法时,能够有利地借助待传输的场景的过滤来做出明智的判定:哪些场景或状况特别重要相关,从而仅须传输子集。
30.因此,借助在此提出的用于评估用于进行控制的第一方法的方法,能够以场景的形式辨识出在测试模式或阴影模式下未知的驾驶状况,以便尤其是针对用于行为规划的第一方法进行评估。
31.根据一个方面提出,用于控制至少部分自动化的平台的第一方法是用于对至少部分自动化的移动平台进行行为规划的方法。
32.尤其是对于涉及行为规划的第一方法,能够有利地使用所描述的用于评估的方法,因为行为规划涉及如下动作:这些动作在未来具有影响,并且因此通过与其他方法的即时比较,这些动作仅能不充分地表征用于评估。
33.在此,行为规划器可以理解为如下方法:该方法涉及轨迹规划的初级阶段,在该初级阶段中,相应于移动平台的周围环境中的交通状况/场景做出关于移动平台的未来行为的决策,例如执行变道的决策。行为规划器尤其可以替代地或附加地理解为提供轨迹的方
法。为此,行为规划器借助作为输入变量的与周围环境有关的确定参量(这些确定参量是借助传感器系统所确定的)以移动平台周围环境的场景表示的形式获得移动平台的周围环境的主要对象及其相对布置和/或相对于彼此和相对于移动平台的定向。
34.传感器系统的与周围环境有关的确定参量是如下确定参量:该确定参量与传感器系统的周围环境有关并且借助一个或多个传感器系统的数据确定。
35.在此,与周围环境有关的确定参量可以是如下参量:该参量借助关于测量目标的传感器系统数据、为了表示传感器系统的周围环境而进行分析处理和/或汇总。
36.例如,关于测量目标(对象探测)对图像分割或立体像素或激光雷达系统的l形进行分析处理,例如以便识别、测量对象类别汽车并确定其位置。
37.在此,与周围环境有关的确定参量可以比传感器系统的纯数据更高度地抽象化。例如,与周围环境有关的确定参量可以具有对象、特征、立体像素、相应确定对象的尺寸(ausmaβe)、对象类型、三维“边界框”、对象类别、例如激光雷达系统的l形和/或边缘和/或反射点。
38.在此,与周围环境有关的确定参量也可以具有传感器系统的数据和/或移动平台周围环境对象的对象列表。
39.根据一个方面提出,借助多个至少部分自动化的移动平台评估第一方法,和/或将来自多个至少部分自动化的移动平台中的一部分的相应场景的表示无线传输到用于对第一方法进行评估的中央机构。
40.通过借助多个至少部分自动化的移动平台来应用该方法,将该方法推广到车队上,从而能够有利地在相对短的时间内获得关于第一方法在现场中的大量知识。因此,能够在这种评估基础上做出可靠的发布决策或实现第一方法的有针对性的进一步开发。
41.根据一个方面提出,仅将相应场景的表示的一部分传输到用于进行评估的中央机构,并且该部分取决于相应场景的表示和/或第一方法,以便将待传输的数据量最小化。
42.有利地,由于仅将相应场景的表示的一部分传输到中央机构,因此可以在存在场景限定的数据的移动平台处判定,将哪些状况描述或场景表示传输到用于进行评估的中央机构。在此,在传输待传输的场景表示之前,可以相应于对于用于进行控制的第一方法的评估而言重要相关的场景来选择待传输的场景表示。
43.根据一个方面提出,传输相应的至少部分自动化的移动平台的相应的控制动作。
44.有利地,通过传输在移动平台的周围环境的特定场景中所确定的相应控制动作,可以借助多个控制动作对用于进行控制的第一方法进行评估。替代或附加地,当第一方法和/或第二方法未激活时,也可以传输车辆驾驶员的控制动作。
45.根据一个方面提出,在相应的至少部分自动化的移动平台中,在测试模式下运行第一方法。
46.由此,也可以在第一方法的较早的开发阶段中已经借助实际状况来评估第一方法。
47.例如,由此得出如下可能性:将新的第一方法的性能与当前方法的和/或移动平台的驾驶员的性能进行比较。然后对所收集到的数据(例如尤其是场景表示)进行确定和存储和/或传递到云或中央机构以用于进行评估。
48.根据一个方面提出,借助第二方法确定控制动作,并且该第二方法至少部分地控制至少部分自动化的移动平台以评估第一方法。
49.根据一个方面提出,通过将借助第一方法所确定的控制动作与来自相同场景的、借助第二方法所确定的控制动作进行比较来确定置信值。
50.由于第二方法至少部分地控制移动平台,因此对于第一方法的评估得出良好的比较基础,因为对于控制动作的确定,移动平台的周围环境的场景对于两种方法而言可以是相同的。
51.根据一个方面提出,附加地或替代地借助第一方法的自评价确定置信值。
52.根据一个方面提出,通过将借助第一方法所确定的控制动作与来自相同场景的、至少部分自动化的移动平台的车辆驾驶员的控制动作进行比较来确定置信值。
53.有利地,由此得出如下可能性:即使用于至少部分地控制移动平台的第二方法尚未发布用于道路交通,也能够执行与移动平台的车辆驾驶员的行为的比较。
54.根据一个方面提出,借助机器学习方法确定置信值。
55.在此,机器学习方法的示例为(贝叶斯)神经网络,(在必要时)结合全连接神经网络,(在必要时)使用经典的正则化和稳定层(例如批量归一化和训练弃权(trainings-drop-outs)),使用不同的激活函数(例如sigmoid和relu等)的情况下,诸如支持向量机、提升方法(boosting)、决策树、高斯过程(尤其具有用于预测的方差计算)之类的经典方案,以及随机森林。
56.根据一个方面提出,借助基于模型的方法确定置信值。
57.这种基于模型的方法可以借助专家知识来生成,并且置信值的确定可以基于如下:基于模型的方法能够识别,当前的输入数据(即,尤其是周围环境表示)是位于该方法的外推范围内(即,对于该基于模型的方法,从训练或手动规范阶段中未知足够相似的状况)还是位于内插范围内(即,对于该基于模型的方法,从开发阶段中存在足够多的相似状况)。
58.提出一种方法,该方法基于借助第一方法所确定的、已借助上述方法之一所确定的控制动作提供用于操控至少部分自动化的车辆的控制信号;和/或基于借助第一方法所确定的控制动作提供用于警告车辆乘员的警告信号。
59.术语“基于”关于如下特征应广义地理解:基于借助第一方法所确定的控制动作提供控制信号。该术语应如此理解,即借助第一方法所确定的控制动作可以考虑用于控制信号的任何确定或计算,其中,这不排除也还可以考虑其他输入参量用于该控制信号的确定。这相应地适用于警告信号的提供。
60.例如,高度自动化的系统可以借助这种控制信号来进行到安全状态中的转换,其方式为:例如,在至少部分自动化的车辆中,执行在路肩上的缓慢停车。
61.提出一种评估设备,该评估设备设置用于执行上述方法之一。
62.借助这种评估设备,能够容易地将该方法引入到不同的移动平台中。
63.根据一个方面,说明一种计算机程序,其包含指令,在由计算机实施该计算机程序时,这些指令促使该计算机实施上述方法之一。这种计算机程序能够实现所述方法在不同系统中的使用。
64.说明一种机器可读的存储介质,在该机器可读的存储介质上存储有上述计算机程序。借助这种机器可读的存储介质,上述计算机程序是可运输的。
附图说明
65.参照图1示出本发明的实施例,并在下文中对其进行更详细的阐述。
66.附图示出:
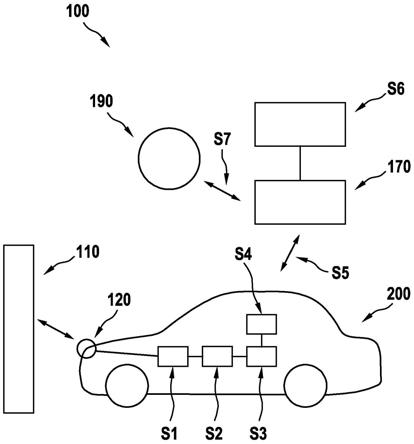
67.图1示出用于评估用于控制至少部分自动化的移动平台的第一方法的方法的数据流概图。
具体实施方式
68.图1示意性地描绘出用于在移动平台200的周围环境110中评估用于控制至少部分自动化的移动平台200的第一方法的方法100的数据流。借助传感器120,能够从移动平台200的周围环境110生成周围环境110的表示。
69.第一方法能够在测试模式下运行以用于进行评估,而不具有对移动平台200的控制的直接影响。在此,移动平台200可以至少部分地由第二方法控制。
70.在步骤s1中,借助第一方法针对周围环境的场景确定控制动作。
71.在步骤s2中,确定借助第一方法确定控制动作的置信值。
72.在此,置信值的确定可以如下确定:通过将借助第一方法所确定的控制动作与来自相同场景的、借助第二方法所确定的控制动作进行比较,和附加地或替代地通过将借助第一方法所确定的控制动作与来自相同场景的、至少部分自动化的移动平台的车辆驾驶员的控制动作进行比较,和附加地或替代地借助机器学习系统,和附加地或替代地借助基于模型的方法,或附加地或替代地通过第一方法的自身评价。
73.在步骤s3中,如果所确定的置信值小于信任值,则确定移动平台200的周围环境110的场景的表示,以便以该场景评估第一方法。
74.在步骤s4中,可以对是否将如下场景的表示传输到用于进行评估的中央机构170进行过滤:在该场景中,用于确定控制动作的置信值小于信任值。这就是说,仅将各个相应场景的表示的一部分传输到用于进行评估的中央机构170。相应场景的所传输的表示的该部分可以取决于相应场景的表示和/或第一方法,其方式为:仅传输场景的对于第一方法的评估所必需的表示,以便将待传输的数据量最小化。
75.在步骤s5中,可以将场景的应传输的相应表示传输到中央机构170。
76.该方法可以借助多个车辆或移动平台190来执行,并且在相应的步骤s7中分别传输到用于进行评估的中央机构170。用于相应控制动作的、相应车辆或移动平台200的相应场景的表示的这种传输,可以从多个车辆或移动平台190无线传输到中央机构170。
77.在该方法的步骤s6中,可以借助多个移动平台的场景的多个表示和相应的控制动作对用于控制至少部分自动化的移动平台的第一方法进行评估。在此,第一方法可以是用于对至少部分自动化的移动平台进行行为规划的方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1