一种基于多角度取相的无人车的制作方法
1.本发明涉及一种基于多角度取相的无人车。
背景技术:
2.高速监控摄像是高速公路的“眼睛”,可实时监控高速上的各种情况。传统的“高速之眼”要么固定在高速公路上,要么安装在无人车或者无人机上。
3.现有技术中,无人车上的“高速之眼”取相范围小,当需要多角度进行取相时,需要设置多个控制机构,结构复杂且操作不便。
技术实现要素:
4.本发明的目的在于提出一种能够多角度调节摄像头的无人车。
5.为解决上述问题,本发明提供了一种基于多角度取相的无人车,其特征在于,包括无人机主体,安装在所述无人机主体上方的第一调节装置以及位于所述无人机主体内部的第二调节装置,其中所述第一调节装置包括:摄像头本体,由控制装置控制进行拍照或者摄像;固定安装座,所述摄像头本体沿水平轴线转动连接在所述固定安装座一侧,所述固定安装座的另一侧为弧面,该弧面上设有与该弧面同心且为弧形的固定滑动槽;转动轴,固定连接在所述摄像头本体底部,所述转动轴上设置有竖直的第一竖直滑槽;升降旋转轴,通过一转动连接头转动连接在所述转动轴底部,所述升降旋转轴由第二调节装置驱动做升降运动和旋转运动;固定支架,其竖直设置,所述固定支架上设置有第二竖直滑槽;伸缩杆,其一端与能够在所述固定滑动槽滑动的第一滑动块转动连接,其另一端滑动设置在所述第二竖直滑槽内;旋转连接盘,转动连接在所述转动轴上,并能够在所述第一竖直滑槽中滑动;驱动杆,为杆状结构,其一端转动连接在所述旋转连接盘底部,另一端滑动连接在所述第二竖直滑槽中,所述固定支架上设置有限制所述驱动杆一端在其中滑动的刹车装置。
6.作为本发明的进一步改进,所述第二调节装置包括:旋转套管,为中空的筒状结构,其内腔自上而下设置均具有圆筒状内壁的第一腔室和第二腔室,所述第一腔室的内壁上至少具有一个竖直设置的条形槽,所述旋转套管外部设有驱动其沿其轴线旋转的第一驱动装置;升降芯轴,其与所述升降旋转轴固定连接,所述升降轴芯包括位于第一腔室内的第一轴体和位于第二腔室内的第二轴体,所述第一轴体上设有能够插入所述条形槽内并可在其中滑动的插条,所述第二轴体能够在所述第二腔室内滑动,所述第一轴体的上方通过传动装置与所述第二转轴传动连接;
活动滑板以及固定限位板,均为圆饼状结构,所述滑动滑板滑动连接在第二轴体上,所述固定限位板固定在所述第二轴体上,并能够在所述第二腔室内滑动,所述第一腔室的腔壁能够限制所述活动滑板进入所述第一腔室;复位弹簧,套设在所述第二轴体上,并位于所述活动滑板和所述固定限位板之间;托举机构,位于所述升降轴芯的正下方,所述托举机构由升降机构驱动,用于托举所述升降轴芯升降,当所述托举机构与所述升降轴芯的底部接触时,其之间以不传递扭矩的方式连接。
7.作为本发明的进一步改进,所述升降机构包括第一升降装置和第二升降装置,所述第一升降装置设有与所述托举机构连接、并能够做升降运动的第一升降臂,以及第一升降座;所述第二升降装置包括第二升降杆以及第二旋转套,所述第一升降座固定在所述第二升降杆上,其至少设有一段具有外螺纹的螺纹段,所述第二旋转套设有与所述螺纹段连接的内螺纹,并由第二驱动装置驱动旋转;所述第一升降机构为气缸,所述第一升降臂为气缸臂,所述第一升降座为气缸座,所述第一升降座通过滑轨滑动连接在一竖直设置的固定板上,所述固定板通过一水平设置的第一连接板固定在所述第二升降杆底部,所述第一气缸臂底部连接有第二连接板,所述第二连接板一端与所述托举机构连接。
8.作为本发明的进一步改进,所述托举机构为下列结构的一种:所述托举机构为固定在所述第二轴体上的第一底盘,所述第二连接板的一端转动连接在所述第一底盘上,所述第一底盘的上表面固定在所述第二轴体的正下方;所述托举机构为位于所述第二轴体正下方,且在初始位置下与所述第二轴体无相对连接关系的的第二底盘,所述第二底盘向上运动与所述第二轴体接触时,其之间的连接方式为转动连接。
9.作为本发明的进一步改进,所述第一底盘外圆周上设有与之同心的环形槽,所述第二连接板自由端设置有弧形伸出臂,所述弧形伸出臂的内侧面上转动有复数个第一滚珠,所述第一滚珠安装在所述环形槽上并能够在其中滚动。
10.作为本发明的进一步改进,所述第二轴体至少底部设置有圆锥形结构连接部;所述第二底盘上设置有安装孔,所述安装孔内壁上设有与之同心的环形安装槽,所述环形安装槽内转动连接有复数个第二滚珠,当所述托举机构上升时,所述第二轴体的连接部插入所述安装孔中并与所述第二滚珠接触。
11.作为本发明的进一步改进, 所述旋转套管和所述第二旋转套上均设有皮带轮,所述第一驱动装置和第二驱动装置均为脉冲电机,所述脉冲电机上均设置有与电机轴连接的主动轮,所述主动轮与所述皮带轮之间通过皮带张紧连接。
12.作为本发明的进一步改进,所述第一腔室的内壁上具有四个所述条形槽,并且沿着所述第一腔体的圆形内壁均匀设置,所述第一轴体上设置有沿其轴向均匀设置的四个所述插条。
13.作为本发明的进一步改进,所述旋转连接盘包括筒状结构的套管以及转动连接在所述套管上的圆盘,所述套管内壁固定安装有至少一个第二滑动块,所述第二滑动块能够在所述第一竖直滑槽中滑
动,所述圆盘底部设有固定安装块,所述驱动杆的一端转动连接在所述第二滑动块上;所述伸缩杆包括第一杆体以及插入所述第一杆体内,并能够通过滑动至少部分伸出所述第一杆体的第二杆体,所述第一杆体一端转动连接在所述第一滑动块上,所述第二杆体转动连接在一可在所述第二竖直滑槽内竖直滑动的第三滑动块上。
14.作为本发明的进一步改进,所述第一腔室的内壁上具有四个所述条形槽,并且沿着所述第一腔体的圆形内壁均匀设置,所述第一轴体上设置有沿其轴向均匀设置的四个所述插条。
15.本发明的有益效果在于,本发明在无人机主体上设置第一调节装置和第二调节装置,其中第一调节装置设置有升降旋转轴,该升降旋转轴通过第二调节装置驱动摄像头本体做升降运动以及绕竖直轴线的旋转运动,另外,该第一调节装置上还设置驱动杆,当驱动杆一端刹车时,在驱动杆的作用下,升降旋转轴的升降将带动整个摄像头本体绕水平轴线做旋转运动,本发明能够使得摄像头本体做升降运动、绕水平轴线和竖直轴线的旋转运动,从而使得摄像头本体能够多角度取景,解决了现有技术中的问题。
附图说明
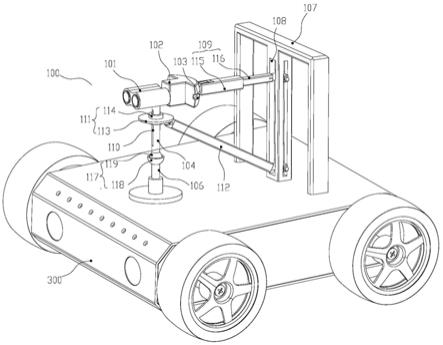
16.图1是本发明的结构示意图;图2是本发明第一实施例的第二调节装置结构示意图;图3是本发明第二实施例的第二调节装置的部分结构示意图;图中:100-第一调节装置;101-摄像头本体;102-固定安装座;103-固定滑动槽;104-转动轴;106-升降旋转轴;107-固定支架;108-第二竖直滑槽;109-伸缩杆;110-第一竖直滑槽;111-旋转连接盘;112-驱动杆;113-套管;114-圆盘;115-第一杆体;116-第二杆体;117-转动连接头;118-限位球套;119-滚体;200-第二调节装置;210-旋转套管;212-条形槽;220-升降芯轴;222-第一轴体;224-第二轴体;226-插条;230-活动滑板;240-固定限位板;250-复位弹簧;260-托举机构;261-第一底盘;262-第二底盘;263-环形槽;264-弧形伸出臂;265-环形安装槽;266-第二滚珠;270-升降机构;272-第二升降杆;273-第一升降臂;274-第一升降座;275-第二旋转套;276-滑轨;277-固定板;278-第一连接板;279-第二连接板;300-无人机主体。
具体实施方式
17.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
18.如图1所示,本发明包括:无人机主体300,安装在所述无人机主体300上方的第一调节装置100以及位于所述无人机主体300内部的第二调节装置200,其中所述第一调节装置100包括:摄像头本体101,由控制装置控制进行拍照或者摄像;固定安装座102,所述摄像头本体101沿水平轴线转动连接在所述固定安装座102一侧,所述固定安装座102的另一侧为弧面,该弧面上设有与该弧面同心且为弧形的固定滑动槽103;转动轴104,固定连接在所述摄像头本体101底部,所述转动轴104上设置有竖直的第一竖直滑槽110;
升降旋转轴106,通过一转动连接头117转动连接在所述转动轴104底部,所述升降旋转轴106由第二调节装置200驱动做升降运动和旋转运动;固定支架107,其竖直设置,所述固定支架107上设置有第二竖直滑槽108;伸缩杆109,其一端与能够在所述固定滑动槽103滑动的第一滑动块转动连接,其另一端滑动设置在所述第二竖直滑槽108内;旋转连接盘111,转动连接在所述转动轴104上,并能够在所述第一竖直滑槽110中滑动;驱动杆112,为杆状结构,其一端转动连接在所述旋转连接盘111底部,另一端滑动连接在所述第二竖直滑槽108中,所述固定支架107上设置有限制所述驱动杆112一端在其中滑动的刹车装置。
19.作为本发明的进一步改进,所述第二调节装置200包括:旋转套管210,为中空的筒状结构,其内腔自上而下设置均具有圆筒状内壁的第一腔室和第二腔室,所述第一腔室的内壁上至少具有一个竖直设置的条形槽212,所述旋转套管210外部设有驱动其沿其轴线旋转的第一驱动装置;升降芯轴220,其与所述升降旋转轴106固定连接,所述升降轴芯包括位于第一腔室内的第一轴体222和位于第二腔室内的第二轴体224,所述第一轴体222上设有能够插入所述条形槽212内并可在其中滑动的插条226,所述第二轴体224能够在所述第二腔室内滑动,所述第一轴体222的上方通过传动装置与所述第二转轴传动连接;活动滑板230以及固定限位板240,均为圆饼状结构,所述滑动滑板滑动连接在第二轴体224上,所述固定限位板240固定在所述第二轴体224上,并能够在所述第二腔室内滑动,所述第一腔室的腔壁能够限制所述活动滑板230进入所述第一腔室;复位弹簧250,套设在所述第二轴体224上,并位于所述活动滑板230和所述固定限位板240之间;托举机构260,位于所述升降轴芯的正下方,所述托举机构260由升降机构270驱动,用于托举所述升降轴芯升降,当所述托举机构260与所述升降轴芯的底部接触时,其之间以不传递扭矩的方式连接。
20.作为本发明的进一步改进,所述升降机构270包括第一升降装置和第二升降装置,所述第一升降装置设有与所述托举机构260连接、并能够做升降运动的第一升降臂273,以及第一升降座274;所述第二升降装置包括第二升降杆272以及第二旋转套275,所述第一升降座274固定在所述第二升降杆272上,其至少设有一段具有外螺纹的螺纹段,所述第二旋转套275设有与所述螺纹段连接的内螺纹,并由第二驱动装置驱动旋转;所述第一升降机构270为气缸,所述第一升降臂273为气缸臂,所述第一升降座274为气缸座,所述第一升降座274通过滑轨276滑动连接在一竖直设置的固定板277上,所述固定板277通过一水平设置的第一连接板278固定在所述第二升降杆272底部,所述第一气缸臂底部连接有第二连接板279,所述第二连接板279一端与所述托举机构260连接。
21.作为本发明的进一步改进,所述托举机构260为下列结构的一种:所述托举机构260为固定在所述第二轴体224上的第一底盘261,所述第二连接板279的一端转动连接在所述第一底盘261上,所述第一底盘261的上表面固定在所述第二轴体224的正下方;
所述托举机构260为位于所述第二轴体224正下方,且在初始位置下与所述第二轴体224无相对连接关系的的第二底盘262,所述第二底盘262向上运动与所述第二轴体224接触时,其之间的连接方式为转动连接。
22.作为本发明的进一步改进,所述第一底盘261外圆周上设有与之同心的环形槽263,所述第二连接板279自由端设置有弧形伸出臂264,所述弧形伸出臂264的内侧面上转动有复数个第一滚珠,所述第一滚珠安装在所述环形槽263上并能够在其中滚动。
23.作为本发明的进一步改进,所述第二轴体224至少底部设置有圆锥形结构连接部;所述第二底盘262上设置有安装孔,所述安装孔内壁上设有与之同心的环形安装槽265,所述环形安装槽265内转动连接有复数个第二滚珠266,当所述托举机构260上升时,所述第二轴体224的连接部插入所述安装孔中并与所述第二滚珠266接触。
24.作为本发明的进一步改进, 所述旋转套管210和所述第二旋转套275上均设有皮带轮,所述第一驱动装置和第二驱动装置均为脉冲电机,所述脉冲电机上均设置有与电机轴连接的主动轮,所述主动轮与所述皮带轮之间通过皮带张紧连接。
25.作为本发明的进一步改进,所述第一腔室的内壁上具有四个所述条形槽212,并且沿着所述第一腔体的圆形内壁均匀设置,所述第一轴体222上设置有沿其轴向均匀设置的四个所述插条226。
26.作为本发明的进一步改进,所述旋转连接盘111包括筒状结构的套管113以及转动连接在所述套管113上的圆盘114,所述套管113内壁固定安装有至少一个第二滑动块,所述第二滑动块能够在所述第一竖直滑槽110中滑动,所述圆盘114底部设有固定安装块,所述驱动杆112的一端转动连接在所述第二滑动块上;所述伸缩杆109包括第一杆体115以及插入所述第一杆体115内,并能够通过滑动至少部分伸出所述第一杆体115的第二杆体116,所述第一杆体115一端转动连接在所述第一滑动块上,所述第二杆体116转动连接在一可在所述第二竖直滑槽108内竖直滑动的第三滑动块上。
27.作为本发明的进一步改进,所述第一腔室的内壁上具有四个所述条形槽212,并且沿着所述第一腔体的圆形内壁均匀设置,所述第一轴体222上设置有沿其轴向均匀设置的四个所述插条226。
28.本发明的具体原理如下:一、竖直升降(1)第一升降装置运动,这里的第一升降装置为气缸,工作时,第一升降座274沿着固定板277上的滑轨276做升降运动,带动第一升降臂273做升降运动;(2)第一升降臂273带动第二连接板279做升降运动;(3)如图2,在本发明的一种实施例中,上升时:i. 第二连接板279带动第一底盘261升降;ii. 第一底板与升降轴芯的第二轴体224固定连接,从而带动带动第二轴体224升降,从而带动与升降轴芯连接的升降旋转轴106上升;
iii. 升降旋转轴106上升,带动转动轴104升降,因为驱动杆112上的第二滑动块和第二杆体116上的第三滑动块能够在第二竖直滑槽108中竖直滑动,因此转动轴104带动整个摄像头组件升降时,摄像头组件同时带动伸缩杆109以及驱动杆112升降,因而不会产生水平方向的作用力,因此此时摄像头组件仅做升降运动。
29.iv. 这里第二连接板279与第一底盘261弧形伸出臂264中的第一滚珠安装在环形槽263中,使得第一底盘261在升降轴芯的带动下旋转时,该第二连接板279能够保证竖直方向上的支撑的同时不传递扭矩,保证第一升降装置和第二升降装置能够正常工作;v. 设置活动滑板230和固定限位板240,并在其之间设置复位弹簧250,活动滑板230限制复位弹簧250进入旋转套管210的第一腔室内,固定限位板240限制复位弹簧250的底部位置,活动滑板230和固定限位板240的设置使得上升过程中压缩复位弹簧250,这里复位弹簧250的作用是消除竖直方向上各工件制造和装配过程中误差产生的间隙,从而使得上升时形成控制更加精确;下降时:i. 第二连接板279带动第一底盘261下降;ii. 第一底板与升降轴芯的第二轴体224固定连接,从而带动升降旋转轴106下降,进而带动摄像头本体101下降;(4)如图3所示,为本发明的第二实施例,其与第一实施例的区别在于,第二底盘262与第二轴体224无接触,通过环形安装槽265中的第二滚珠266与第二轴体224接触,从而传递升降运动的同时保持之间以不传递扭矩的方式连接。
30.二、相机绕竖直轴线旋转第一驱动机构(如电机),驱动旋转套管210转动,旋转套管210内的条形槽212与插条226配合使得旋转套管210的扭矩能够传递至升降轴芯上,升降轴芯在带动与之固定连接的升降旋转轴106做旋转运动(升降轴芯与升降旋转轴106可以通过法兰连接),带动摄像头组件绕竖直轴线旋转,该旋转运动的幅度不宜过大,一般在0-180
°
左右。
31.三、相机绕水平轴线旋转(1)第二驱动装置驱动第二旋转套275转动,第二驱动装置优选脉冲电机,从而实现转速以及旋转圈数的可调;(2)第二旋转套275旋转带动与之螺纹连接的第二升降杆272升降,并通过第一连接板278、第一升降装置以及第二连接板279带动第一底盘261或者第二底盘262升降,从而带动整个旋转轴芯升降,因为第二旋转套275的转速和旋转圈数是可调节的,因此整个升降速度和行程也是可调节的;(3)升降旋转轴106上升,带动转动轴104升降,因为驱动杆112上的第二滑动块上的刹车装置制动(刹车装置如橡胶刹车片,通过与固定支架107接触并产生足够大的摩擦力,从而限制其相对运动),使得第二滑动块无法在在第二竖直滑槽108中滑动,此时转动轴104带动驱动杆112一端上升将带动整个驱动杆112绕第二滑动块转动块,从而使得驱动杆112另一端在水平方向上的位置,从而带动整个转动轴104绕升降旋转轴106转动,即滚体119在限位球套118中运动,从而使得摄像头组件绕水平轴线做旋转运动。
32.以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术
人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1