用于自主车辆的车辆安全系统的制作方法
1.本文档总体上涉及控制车辆,并且具体地涉及用于自主车辆的安全系统。
背景技术:
2.自主车辆导航是一种用于感测车辆的位置和运动并且基于感测自主地控制车辆向目的地导航的技术。自主车辆在人员、货物和服务的运输中有着重要的应用。利用冗余来确保连续且稳健的自主操作的车辆安全系统对于车辆及其乘客以及车辆附近的人员和财产的安全至关重要。
技术实现要素:
3.公开了与用于自主车辆的车辆安全系统相关的设备、系统和方法。在一个示例中,这是通过冗余车辆控制单元(vcu)实现的,每个vcu使用单独的传感器和不同的控制回路来实现故障检测方法和故障安全控制方法,这些方法与故障操作系统一起工作,以确保高度可靠的操作。
4.在一方面,所公开的技术可以用于提供一种用于安全地控制车辆的方法。该方法包括基于来自第一车辆控制单元的第一控制命令选择车辆的操作模式,并且基于该选择向自主驾驶系统传送操作模式,其中第一控制命令由第一车辆控制单元基于来自第一多个传感器的输入生成,其中在在第一控制命令中检测到错误的情况下,由第二车辆控制单元基于来自不同于第一多个传感器的第二多个传感器的输入生成第二控制命令,并且其中操作模式对应于以下一项:(a)默认操作模式,(b)将车辆配置为靠泊到最近的预先指定的安全位置的第一类型的最小风险条件模式,(c)将车辆配置为立即停在当前车道的第二类型的最小风险条件模式,或(d)将车辆配置为平缓停止的第三类型的最小风险条件模式。
5.在另一方面,所公开的技术可以用于提供一种用于安全控制车辆的系统。该系统包括第一车辆控制单元、第二车辆控制单元和处理器,该第一车辆控制单元被配置为接收来自第一感测单元的第一输入、来自第一导航系统的第二输入和来自物体检测电子控制单元的第三输入,并且基于对第一输入、第二输入和第三输入的处理来输出至少第一控制命令,第二车辆控制单元被配置为接收来自第二感测单元的第四输入、来自第二导航系统的第五输入和来自物体检测电子控制单元的第六输入,并且基于对第四输入、第五输入和第六输入的处理来输出至少第二控制命令,该处理器被配置为基于第一控制命令选择车辆的操作模式,其中操作模式对应于以下一项:(a)默认操作模式,(b)将车辆配置为靠泊到最近的预先指定的安全位置的第一类型的最小风险条件模式,(c)将车辆配置为立即停在当前车道的第二类型的最小风险条件模式,或(d)将车辆配置为平缓停止的第三类型的最小风险条件模式。
6.在又一方面,上述方法以处理器可执行代码的形式体现并且存储在计算机可读程序介质中。
7.在又一方面,公开了一种被配置为或可操作以执行上述方法的设备。该设备可以
包括被编程以实现该方法的处理器。
8.在附图、说明书和权利要求中更详细地描述了所公开的技术的上述和其他方面和特征。
附图说明
9.图1示出了示例车辆生态系统的框图,其中位于车辆中的车载控制计算机包括车辆安全系统(vss);
10.图2示出了vss的示例的框图;
11.图3示出了在默认操作与最小风险条件(mrc)模式之间切换的仲裁逻辑的示例;
12.图4示出了选择vcu的仲裁逻辑的示例;
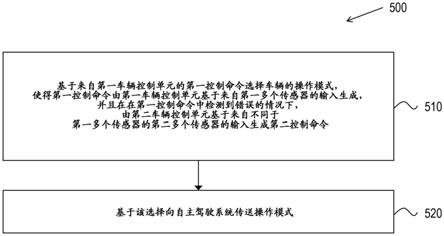
13.图5示出了用于控制车辆制动的示例方法的流程图;以及
14.图6示出了可以实现本文档中描述的一些方法和技术的硬件平台的示例。
具体实施方式
15.交通运输业在使用技术来控制车辆操作的方式方面已经经历了相当大的变化。正如以汽车乘用车为例,在将更多的操作性和导航性决策从人类驾驶转移到车载计算能力方面取得了普遍进步。大量未开发的自主车辆就是一个极端示例。目前的实现处于中间阶段,诸如一些车辆中的部分自主操作(例如,自主加速和导航,但需要驾驶员在场且细心)、一些车辆的安全保护操作(例如,保持安全跟车距离和自动制动)、一些车辆的安全保护警告(例如,侧视镜盲点指示器和接近传感器)、和易用操作(例如,自动平行停车)。
16.随着车辆的自主性增加,车辆安全系统变得至关重要。传统技术和实现不适合为级别4(l4)系统提供操作安全,根据sae j3016,这表明在大多数情况下不需要人类驾驶员的高水平驾驶自动化。传统的车辆安全系统通常是l2系统,该系统被配置为仅提供有限的感测信息,该信息无法处理所有操作场景。此外,现有系统始终具有车载驱动器,并且因此根据定义,无法满足最高汽车安全完整性等级(asil),即asil d。
17.如果车辆安全系统(vss)检测到当前驾驶任务无法充分实现或完成,则自主驾驶系统(ads)可以监测的自主车辆的默认操作模式可以改变为最小风险条件(mrc)模式。vss确定车辆应当切换到哪种mrc模式以确保车辆和周围环境的安全。
18.图1示出了示例车辆生态系统100的框图,其中位于自主车辆105中的车载控制计算机150包括同步多个异构传感器的同步单元。如图1所示,自主车辆105可以是半拖车-卡车。车辆生态系统100包括多个系统和组件,这些系统和组件可以生成和/或向可能位于自主车辆105中的车载控制计算机150递送一个或多个信息/数据源和相关服务。车载控制计算机150可以与多个车辆子系统140进行数据通信,所有车辆子系统140都可以驻留在自主车辆105中。车载计算机150和多个车辆子系统140可以被称为自主驾驶系统(ads)。提供车辆子系统接口160以促进车载控制计算机150与多个车辆子系统140之间的数据通信。在一些实施例中,车辆子系统接口160可以包括用于与车辆子系统140中的设备通信的控制器域网控制器。
19.自主车辆105可以包括支持自主车辆105的操作的各种车辆子系统。车辆子系统可以包括车辆驾驶子系统142、车辆传感器子系统144和/或车辆控制子系统146。车辆驾驶子
系统142、车辆传感器子系统144和车辆控制子系统146的组件或设备作为示例示出。在一些实施例中,可以向各种子系统添加附加的组件或设备,或者可以移除一个或多个组件或设备。车辆驾驶子系统142可以包括可操作以为自主车辆105提供动力运动的组件。在示例实施例中,车辆驾驶子系统142可以包括引擎或电机、车轮/轮胎、变速器、电气子系统和动力来源。
20.车辆传感器子系统144可以包括多个传感器,该多个传感器被配置为感测关于自主车辆105正在其中操作的环境或自主车辆105的状况的信息。车辆传感器子系统144可以包括一个或多个相机或图像捕获设备、一个或多个温度传感器、惯性测量单元(imu)、全球定位系统(gps)设备、激光测距仪/激光雷达(lidar)单元、雷达(radar)单元、超声波传感器和/或无线通信单元(例如,蜂窝通信收发器)。车辆传感器子系统144还可以包括被配置为监测自主车辆105的内部系统(例如,氧气(o2)显示器、燃料计、引擎机油温度等)的传感器。在一些实施例中,车辆传感器子系统144可以包括除了图1所示的传感器之外的其他传感器。
21.imu可以包括被配置为基于惯性加速度来感测自主车辆105的位置和取向变化的传感器(例如,加速度计和陀螺仪)的任何组合。gps设备可以是被配置为估计自主车辆105的地理位置的任何传感器。为此,gps设备可以包括可操作以提供关于自主车辆105相对于地球的位置的信息的接收器/发射器。radar单元可以表示利用无线电信号来感测自主车辆105正在其中操作的环境内的物体的系统。在一些实施例中,除了感测物体之外,radar单元还可以被配置为感测靠近自主车辆105的物体的速度和航向。激光测距仪或lidar单元可以是被配置为使用激光来感测自主车辆105定位在其中的环境中的物体的任何传感器。lidar单元可以是旋转式lidar单元或固态lidar单元。相机可以包括被配置为捕获自主车辆105的环境的多个图像的一个或多个相机。相机可以是静止图像相机或运动视频相机。
22.车辆控制子系统146可以被配置为控制自主车辆105及其组件的操作。因此,车辆控制子系统146可以包括各种元件,诸如,油门和档位、制动单元、导航单元、转向系统和/或自主控制单元。油门可以被配置为控制例如引擎的操作速度,并且进而控制自主车辆105的速度。档位可以被配置为控制变速器的档位选择。制动单元可以包括被配置为使自主车辆105减速的机构的任何组合。制动单元可以以标准方式使用摩擦来使车轮减速。制动单元可以包括防抱死制动系统(abs),该abs系统可以在应用制动器时防止制动器抱死。导航单元可以是被配置为确定自主车辆105的行驶路径或路线的任何系统。导航单元还可以被配置为在自主车辆105操作时动态地更新行驶路径。在一些实施例中,导航单元可以被配置为合并来自gps设备的数据和一个或多个预先确定的地图,以便为自主车辆105确定驾驶路径。转向系统可以表示可以用于在自主模式或驾驶员控制模式下调节自主车辆105的航向的机构的任何组合。
23.自主控制单元可以表示控制系统,该控制系统被配置为标识、评估和避免或以其他方式协商自主车辆105的环境中的潜在障碍物。通常,自主控制单元可以被配置为控制自主车辆105在没有驾驶员的情况下操作或在控制自主车辆105时提供驾驶员辅助。在一些实施例中,自主控制单元可以被配置为合并来自gps设备、radar、lidar、相机和/或其他车辆子系统的数据以为自主车辆105确定行驶路径或轨迹。
24.牵引力控制系统(tcs)可以表示被配置为防止自主车辆105在道路上时转弯或失
去控制的控制系统。例如,tcs可以从imu和引擎扭矩值获取信号以确定它是否应当干预并且向自主车辆105上的一个或多个制动器发送指令以减轻自主车辆105的转弯。tcs是一种主动车辆安全特征,其旨在帮助车辆有效利用道路上的牵引力,例如,在低摩擦路面上加速时。当没有tcs的车辆试图在冰、雪或松散的砾石等光滑表面上加速时,车轮可能会打滑并且导致危险的驾驶情况。tcs也可以称为电子稳定控制(esc)系统。
25.自主车辆105的很多或所有功能可以由车载控制计算机150控制。车载控制计算机150可以包括至少一个处理器170(其可以包括至少一个微处理器),该至少一个处理器170可以执行存储在诸如存储器175等非瞬态计算机可读介质中的处理指令。车载控制计算机150还可以表示多个计算设备,这些计算设备可以用于以分布式方式控制自主车辆105的个体组件或子系统。在一些实施例中,存储器175可以包含处理器170可执行以执行自主车辆105的各种方法和/或功能的处理指令(例如,程序逻辑),包括如本专利文档中解释的针对车辆安全系统(vss)165描述的那些。例如,处理器170执行与vss 165相关联的操作以确保自主车辆的安全操作,包括从默认操作模式切换到最小风险条件(mrc)模式。该专利文档中进一步描述了vss 165的操作。
26.存储器175也可以包含附加指令,包括用于向车辆驾驶子系统142、车辆传感器子系统144和车辆控制子系统146中的一个或多个传输数据、从其接收数据、与其交互或控制其中的一个或多个的指令。车载控制计算机150可以基于从各种车辆子系统(例如,车辆驾驶子系统142、车辆传感器子系统144和车辆控制子系统146)接收的输入来控制自主车辆105的功能。
27.所公开技术的实施例被配置为提供用于l4自主性的车辆安全系统(vss)(如sae j3016所定义的)。在一个示例中,这可以通过使用多个冗余传感器以及不同的控制回路来实现故障检测和故障安全控制两者来实现。vss确保了基于操作车辆的组件的健康/操作状态来为车辆选择适当的操作模式。
28.图2示出了vss的示例的框图,vss包括主车辆控制单元(vcu)210和辅(或冗余)vcu 220,其输出负责车辆控制组件的操作并且分别通过主控制接口和辅控制接口传输。如图2所示,主vcu和辅vcu中的每个耦合到第一感测单元230-1、第二感测单元230-2和物体检测(od)电子控制单元(ecu)240。附加地,主vcu 210耦合到第一全球导航卫星系统(gnss)单元和第一惯性测量单元(imu),并且辅vcu 220另外耦合到第二(和分开的)gnss和imu单元。此外,第一感测单元230-1接收来自第一传感器集和第一gnss/imu单元的输入,并且第二感测单元230-2接收来自第二传感器集和第二gnss/imu单元的输入。在这个示例中,第一传感器集包括相机和lidar单元,第二传感器集包括另一相机、另一lidar单元、超声波传感器和雷达单元。
29.在一些实施例中,vss用作热备份系统,其中主vcu和辅vcu两者始终在线,即使在系统功能正常时也执行计算和执行逻辑。辅vcu保持在活动待机模式,这有利地使其能够在检测到主vcu中的故障时立即接管。在一个示例中,vss系统配置主vcu和辅vcu使得健康的vcu可以在其他vcu中检测到故障之后的10ms内承担控制权。
30.在一些实施例中,vss的输入包括第一传感器集和第二传感器集的输出以及自主监测和诊断(amd)系统的输出,并且vss的输出是车辆控制组件的可执行命令。vss与amd系统协同工作,以确保所有错误都由vss处置并且产生合理的结果。
31.在一些实施例中,vss的冗余有利地使其能够满足asil d要求(asil d在iso 26262中定义)。在该级别,所公开的冗余框架可以在高暴露操作情况下(例如,超过10%的典型操作性时间)安全地操作,在这些情况下,故障可能导致高度严重的伤害(例如,死亡或重大身体伤害)并且可控性极低(例如,不到90%的普通驾驶员或其他交通参与者能够避免伤害)。
32.在一些实施例中,为了提高冗余度,主vcu和辅vcu被配置为使用分开的电源和分开的点火信号源进行操作。
33.在一些实施例中,传感器输出被分别提供给主vcu和辅vcu。在图2所示的示例中,第一传感器集为主vcu提供输入,第二(且不同的)传感器集为辅vcu提供输入。在另一示例中,第一传感器集和第二传感器集包括相同的组件,例如,相机、lidar单元和雷达单元。
34.主vcu和辅vcu的vss和健康/操作状态用于确定哪个vcu保持控制并且确定车辆的操作模式。在一些实施例中,车辆的操作模式从以下模式中的一个模式来选择:
[0035]-默认操作模式;
[0036]-第一类型的mrc模式(表示为mrcl),其将车辆配置为靠泊到最近的预先指定的安全位置;
[0037]-第二类型的mrc模式(表示为mrc2),其将车辆配置为立即停在当前车道;以及
[0038]-第三类型的mrc模式(表示为mrc3),其将车辆配置为平缓停止。
[0039]
图3示出了在默认操作与mrc模式之间切换的仲裁逻辑的示例。如图所示,车辆的操作模式基于但不限于以下参数来确定:
[0040]-与主vcu健康相对应的自动驾驶仪1(ap1)健康
[0041]-与辅vcu健康相对应的ap2健康
[0042]-车辆健康
[0043]-与车辆无法找到并且操纵到预先指定的安全位置相对应的mrc1约束状态
[0044]
在图3所示的示例中,考虑以下状态(其是解释,不是定义):
[0045]-当(healthap≤10)时,ap健康
[0046]-当(healthap》10)时,ap不健康
[0047]-当(10《healthveh《40)时,车辆健康
[0048]-当(healthveh≥40)时,车辆不健康
[0049]
值10和40是与接收到的错误或警告消息或任何其他相关度量或标准相对应的示例性阈值。在一些实施例中,用于定义自动驾驶仪和车辆是否健康的阈值可以基于特定车辆和/或用例(例如,是否正在被拖运可能需要额外小心的特定货物)来确定。
[0050]
确定车辆的最佳操作模式的仲裁逻辑的示例基于以下规则:
[0051]
1.以默认操作模式操作(在图3中表示为mrc0)
[0052]
2.如果(ap1_healthy&&ap2_not_healthy&&vehicle_healthy)
[0053]
如果(mrc1_constrained==true)
[0054]
切换到mrc3
[0055]
否则
[0056]
切换到mrc1
[0057]
3.如果((ap1_not_healthy&&ap2_not_healthy)||(脱离自主模式)||vehicle_
not_healthy)
[0058]
切换到mrc2
[0059]
上面描述的这种仲裁逻辑在图3中示出,其中车辆最初以mrc0操作。如果车辆健康(305处为是)并且两个自动驾驶仪(ap1和ap2)都健康(315处为是),则车辆继续以mrc0操作(300)。然而,如果车辆不健康(305处为否),则车辆切换到mrc2(320)。
[0060]
然而,如果ap1和ap2两者都不健康(315处为否),则仲裁逻辑确定自动驾驶仪中的至少一个是否健康(指示为api健康并且apj不健康)。如果两个自动驾驶仪都不健康(325处为否),则车辆切换到mrc2(320)。如果至少一个自动驾驶仪健康(325处为是),则对mrc1的仲裁逻辑检查受到约束,即,车辆无法找到并且操纵到预先指定的安全位置。如果mrc1不受约束(335处为否),则车辆切换到mrc1(310),否则车辆切换到mrc3(330)。
[0061]
图4示出了选择vcu的仲裁逻辑的示例,并且基于主vcu和从vcu能够自配置为主/从关系。如图所示,vcu选择仲裁逻辑以“masterslave=1”开始,这将主vcu设置为以主模式操作,而“masterslave=0”将辅vcu设置为以主模式操作(而将主vcu设置为以从模式操作)。vcu的自配置方面体现在它们之间的通信中,其中如果主vcu经历故障或输出错误状态(对应于vcustatus_self=1),则从vcu接管并且成为主/从关系中的主机。如上所述,主vcu和辅vcu以热备份配置操作。
[0062]
图5示出了用于控制车辆的示例方法500的流程图。方法500包括:在操作510,基于来自第一车辆控制单元的第一控制命令选择车辆的操作模式,使得第一控制命令由第一车辆控制单元基于来自第一多个传感器的输入生成,并且在在第一控制命令中检测到错误的情况下,由第二车辆控制单元基于来自不同于第一多个传感器的第二多个传感器的输入生成第二控制命令。
[0063]
方法500包括:在操作520,基于该选择向自主驾驶系统传输操作模式,操作模式对应于(a)默认操作模式,(b)将车辆配置为靠泊到最近的预先指定的安全位置的第一类型的最小风险条件模式,(c)将车辆配置为立即停在当前车道的第二类型的最小风险条件模式,或(d)将车辆配置为平缓停止的第三类型的最小风险条件模式。
[0064]
在一些实施例中,第一多个传感器包括第一全球导航卫星系统(gnss)、第一惯性测量单元(imu)、第一相机以及第一光检测和测距(lidar)系统。
[0065]
在一些实施例中,第二多个传感器包括第二gnss、第二惯性测量单元(imu)、第二相机、第二光检测和测距(lidar)系统、雷达传感器和超声波传感器。
[0066]
在一些实施例中,方法500还包括以下操作:在确定第一多个传感器中的至少一个传感器已经生成故障指示时,向第一车辆控制单元提供来自第二多个传感器中的对应传感器的输出。
[0067]
在一些实施例中,第一控制命令和第二控制命令分别由第一车辆控制单元和第二车辆控制单元还基于以下各项生成:(a)不同于第一相机和第二相机的车辆安全系统(vss)相机,以及(b)不同于雷达传感器的vss雷达。
[0068]
在一些实施例中,车辆的控制遵守汽车安全完整性等级d(asil d)要求。
[0069]
在一些实施例中,第一车辆控制单元包括第一自动驾驶单元,第二车辆控制单元包括第二自动驾驶单元,并且方法500还包括基于多个规则来选择车辆的操作模式。
[0070]
在一些实施例中,多个规则包括(i)如果第一自动驾驶单元健康,第二自动驾驶单
元健康并且车辆健康,则继续默认操作模式中的操作,(ii)如果车辆健康并且第一自动驾驶单元或第二自动驾驶单元不健康,则切换到所第一类型的最小风险条件模式中的操作,(iii)如果车辆不健康或者第一自动驾驶单元和第二自动驾驶单元两者都不健康,则切换到第二类型的最小风险条件模式中的操作是不可用的,以及(iv)在以下情况下切换到第三类型的最小风险条件模式中的操作:车辆健康,切换到第一类型的最小风险条件模式中的操作是不可用的,以及第一自动驾驶单元或第二自动驾驶单元不健康。
[0071]
在一些实施例中,切换到第一类型的最小风险条件模式中的操作是不可用的至少对应于预先指定的安全位置不可接近。
[0072]
在一些实施例中,第一自动驾驶单元、第二自动驾驶单元或车辆健康分别对应于针对第一自动驾驶单元健康度量、针对第二自动驾驶单元的健康度量或车辆的健康度量小于或等于第一阈值,第一自动驾驶单元或第二自动驾驶单元不健康分别对应于针对第一自动驾驶单元的健康度量或第二自动驾驶单元的健康度量大于第一阈值,以及车辆不健康对应于车辆健康度量大于第二阈值。
[0073]
在一些实施例中,方法500还包括以下操作:在选择操作模式之前,检测第一控制命令中的错误,并且在检测到故障的十毫秒内,向自主驾驶系统传输操作模式,其中选择操作模式还基于第二控制命令。
[0074]
所公开技术的实施例包括一种用于控制车辆的车辆安全系统。示例系统包括第一车辆控制单元、第二车辆控制单元和处理器,该第一车辆控制单元被配置为接收来自第一感测单元的第一输入、来自第一导航系统的第二输入和来自物体检测电子控制单元的第三输入,并且基于对第一输入、第二输入和第三输入的处理来至少输出第一控制命令,第二车辆控制单元被配置为接收来自第二感测单元的第四输入、来自第二导航系统的第五输入和来自物体检测电子控制单元的第六输入,并且基于对第四输入、第五输入和第六输入的处理来至少输出第二控制命令,该处理器被配置为基于第一控制命令选择车辆的操作模式,其中操作模式对应于以下一项:(a)默认操作模式,(b)将车辆配置为靠泊到最近的预先指定的安全位置的第一类型的最小风险条件模式,(c)将车辆配置为立即停在当前车道的第二类型的最小风险条件模式,或(d)将车辆配置为平缓停止的第三类型的最小风险条件模式。
[0075]
在一些实施例中,第一导航系统包括全球导航卫星系统(gnss)。
[0076]
在一些实施例中,第一感测单元包括第一相机以及第一光检测和测距(lidar)系统。
[0077]
在一些实施例中,第二感测单元包括第二相机、第二lidar系统、雷达传感器和超声波传感器。
[0078]
在一些实施例中,物体检测电子控制单元接收来自车辆安全系统(vss)相机的第一输入和来自vss雷达的第二输入。
[0079]
在一些实施例中,车辆以l4自主驾驶模式操作。
[0080]
在一些实施例中,该系统还包括被配置为向第一车辆控制单元供电的第一电源、以及配置为向第二车辆控制单元供电的不同于第一电源的第二电源。
[0081]
在一些实施例中,第一车辆控制单元被配置为接收第一点火信号,并且第二车辆控制单元被配置为接收不同于第一点火信号的第二点火信号。
[0082]
图6示出了可以用于实现本文档中描述的一些技术的硬件平台600的示例。例如,硬件平台600可以实现方法500,或者可以实现本文中描述的各种模块。硬件平台600可以包括可以执行代码以实现方法的处理器602。硬件平台600可以包括可以用于存储处理器可执行代码和/或存储数据的存储器604。硬件平台600还可以包括控制接口606。例如,控制接口606可以实现一种或多种车内通信协议。硬件平台还可以包括车辆控制单元(vcu)610、物体检测(od)ecu620和传感器630。在一些实施例中,vcu 610和od ecu 620的一些或全部可以在处理器602中实现。在其他实施例中,存储器604可以包括多个存储器,其中一些存储器专门由任务规划器、控制解耦器和/或纵向mpc使用。
[0083]
本专利文档中描述的主题和功能操作的实现可以以各种系统、数字电子电路系统或计算机软件、固件或硬件来实现,包括本说明书中公开的结构及其结构等效物、或前述各项中的一种或多种的组合。本说明书中描述的主题的实现可以实现为一个或多个计算机程序产品,例如,编码在有形和非瞬态的计算机可读介质上以供数据处理装置执行或控制数据处理装置的操作的一个或多个计算机程序指令模块。计算机可读介质可以是机器可读存储设备、机器可读存储基板、存储器设备、影响机器可读传播信号的物质组合物、或前述各项中的一种或多种的组合。术语“数据处理单元”或“数据处理装置”涵盖用于处理数据的所有装置、设备和机器,例如包括可编程处理器、计算机、或多个处理器或计算机。除了硬件之外,该装置还可以包括为所讨论的计算机程序创建执行环境的代码,例如,构成处理器固件、协议栈、数据库管理系统、操作系统、或前述各项中的一种或多种的组合的代码。
[0084]
计算机程序(也称为程序、软件、软件应用、脚本或代码)可以以任何形式的编程语言编写,包括编译或解释语言,并且可以以任何形式部署,包括作为独立程序或者作为模块、组件、子程序、或适合在计算环境中使用的其他单元。计算机程序不一定对应于文件系统中的文件。程序可以存储在包含其他程序或数据的文件的一部分中(例如,存储在标记语言文档中的一个或多个脚本)、在专用于所讨论的程序的单个文件中、或在多个协调文件(例如,存储一个或多个模块、子程序或代码部分的文件)中。计算机程序可以部署为在一个计算机上执行,也可以在位于一个站点或分布在多个站点之间并且通过通信网络互连的多个计算机上执行。
[0085]
本说明书中描述的过程和逻辑流程可以由一个或多个可编程处理器执行,该处理器执行一个或多个计算机程序以通过对输入数据进行操作并且生成输出来执行功能。处理和逻辑流程也可以由专用逻辑电路系统来执行,并且该装置也可以实现为专用逻辑电路系统,例如,fpga(现场可编程门阵列)或asic(专用集成电路)。
[0086]
适合于执行计算机程序的处理器包括例如通用和专用微处理器、以及任何种类的数字计算机的任何一个或多个处理器。通常,处理器将从只读存储器或随机存取存储器或这两者接收指令和数据。计算机的基本要素是用于执行指令的处理器以及用于存储指令和数据的一个或多个存储器设备。通常,计算机还将包括用于存储数据的一个或多个大容量存储设备(例如,磁盘、磁光盘或光盘),或者可操作地耦合以从其接收数据或向其传输数据或这两者。然而,计算机不需要有这样的设备。适用于存储计算机程序指令和数据的计算机可读介质包括所有形式的非易失性存储器、介质和存储器设备,例如包括半导体存储设备,例如eprom、eeprom和闪存设备。处理器和存储器可以由专用逻辑电路系统补充或合并到专用逻辑电路系统中。
[0087]
虽然该专利文档包含很多细节,但这些不应当被解释为对任何发明的范围或可能要求保护的范围的限制,而是对可能特定于特定发明的特定实施例的特征的描述。本专利文档中在单独实施例的上下文中描述的某些特征也可以在单个实施例中组合实现。相反,在单个实施例的上下文中描述的各种特征也可以单独地或以任何合适的子组合在多个实施例中实现。此外,尽管上述特征可能被描述为在某些组合中起作用,甚至最初如此要求保护,但在某些情况下,可以从所要求保护的组合中删除组合中的一个或多个特征,并且所要求保护的组合可以针对子组合或子组合的变体。
[0088]
类似地,虽然在附图中以特定顺序描绘了操作,但这不应当理解为要求这样的操作以所示出的特定顺序或按顺序执行,或者执行所有图示的操作,以实现期望的结果。此外,本专利文献中描述的实施例中的各种系统组件的分离不应当理解为在所有实施例中都需要这样的分离。
[0089]
仅描述了一些实现和示例,并且可以基于本专利文档中描述和图示的内容做出其他实现、增强和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1