一种提高经济性的跟车方法、系统及存储介质与流程
1.本发明属于智能辅助驾驶系统,具体涉及一种提高经济性的跟车方法及系统。
背景技术:
2.在提倡绿色环保的大环境下,汽车的能源消耗一直是热门话题,各大汽车厂家通过提高发动机技术、减轻汽车重量等方式,在汽车油耗上大做文章。但厂家公布的油耗通常只针对手动驾驶模式。随着智能驾驶辅助系统的普及,非手动驾驶时的油耗必然成为越来越重要的关注点和考量因素。高速公路行驶是智能辅助驾驶中自适应巡航系统使用的主要场景,关注和提升其燃油经济性,对于提高车辆整体产品力、竞争力具有重要作用。
3.由于高速行驶时的道路、交通环境相对城市简单,因此具备更好的自适应巡航系统持续工作的环境条件,即不会因为频繁出现的干扰因素被迫退出系统,如行人、十字路口、摩托车、车辆切入等复杂工况。因此解决高速工况的自适应巡航跟车时的油耗问题,相对城市具备更好的效益和可行性。
4.公开号为cn105035071a一种面向城市环境下汽车低速走停工况的自动跟车系统及其控制方法,控制系统包括传感器、控制器和执行器,传感器包括毫米波雷达、车载dsrc无线通讯接收模块,执行器包括基于车载can总线通讯的发动机动力控制单元、esc主动制动单元、电子驻车制动单元、自动变速器及发动机怠速启停单元。控制方法利用车车通讯、车路通讯以及各个执行器的协同控制,在停车工况、起步工况与制动工况下实现自动跟车,代替驾驶员的油门及制动操作。本发明不仅能够代替驾驶员实现城市低速/走停工况下的自动跟车,减轻驾驶疲劳,并且结合车联网技术与多种执行机构的协同控制,有效提高跟车过程中的安全性、燃油经济性与乘坐舒适性。该专利公开的技术方案只针对城市低速工况,且高度依赖于车路协同交通系统,不能解决自适应续航更常用的高速工况,也无法适用于当前车路协同交通系统不完善的现状。
5.公开号为cn109484407a 一种电动汽车辅助驾驶的自适应跟车方法,能够实现多目标的协同优化。根据车间距的稳定性要求,建立变车间时距策略;根据车辆在跟车过程中的运动学特征结合建立的变车间时距策略,建立以车间距误差、相对车速、本车加速度以及加速度变化率作为状态变量与输出变量,以期望加速度作为控制变量,前车加速度作为干扰量的自适应跟车动力学模型;根据建立的自适应跟车动力学模型,确定基于模型预测控制的预测模型,预测模型用于实现多个目标指标的协同优化,目标指标包括:经济性、安全性和舒适性。该专利公开的技术方案实现包括经济性在内的多目标的协同优化,但未明确如何提高燃油经济性,并未提及燃油经济性提高的结果。
6.因此有必要研究一种提高经济性的跟车方法及系统,针对非高速工况下自适应巡航模式的跟车场景,旨在根据跟车时的相对车速变化和纵向距离变化关系,适当调整加速度,以达到提高燃油经济性的目的。
技术实现要素:
7.本发明公开的一种提高经济性的跟车方法、系统及存储介质,通过考虑本车与跟车目标之间相对速度的变化,根据相对速度的变化情况,提起预判本车与跟车目标之间的位置关系变化,再根据位置关系的变化调节加速度规划和控制。
8.本发明公开的一种提高经济性的跟车系统,考虑了本车与跟车目标之间相对速度的变化,根据相对速度的变化情况,提起预判本车与跟车目标之间的位置关系变化,再根据位置关系的变化调节加速度规划和控制。
9.本发明公开的一种提高经济性的跟车方法,包括以下步骤,步骤1)融合计算出实际跟车目标车辆的纵向距离l和目标车车速v2;步骤2)获得并输出本车车速v1;步骤3)智能驾驶控制器根据本车车速v1与跟车目标车辆的目标车车速v2,计算两车的相对速差v
ref
和相对速差变化率a
ref
;其中,v
ref =v2-v1,a
ref = v
ref /dt;步骤4)智能驾驶控制器计算和判断两车的靠近趋势,当相对速差大于零且相对速差变化率小于零时,根据当前车速差判断在一定时间后两车速差将小于零,则判断为两车有靠近趋势;步骤5)当本车与跟车目标车具有靠近趋势时,纵向规划提前减小加速度a,减少动力输出。
10.进一步地,同时满足以下条件判断在一定时间后两车速差将小于零,两车有靠近趋势:条件1:本车与跟车目标之间的跟车距离不大于一定值;条件2:相对速差v
ref
大于零;条件3:相对速差变化率a
ref
小于零。
11.进一步地,步骤1)中,摄像头识别出跟车目标车辆,并输出对应的纵向距离和速度;雷达识别出跟车目标车辆,并输出对应的纵向距离和速度;智能驾驶控制器融合摄像头和雷达的跟车目标数据,通过一定算法融合计算出实际跟车目标车辆的纵向距离l和目标车车速v2。
12.进一步地,底盘通过转速传感器识别车轮转速,并根据车轮转速计算输出本车车速v1。
13.本发明还公开了一种提高经济性的跟车系统,包括摄像头、雷达、智能驾驶控制器、底盘和转速传感器;摄像头识别出跟车目标车辆,并输出对应的纵向距离和速度;雷达识别出跟车目标车辆,并输出对应的纵向距离和速度;智能驾驶控制器融合计算出实际跟车目标车辆的纵向距离l和目标车车速v2;底盘通过转速传感器识别车轮转速,并根据车轮转速计算输出本车车速v1;智能驾驶控制器根据本车车速v1与跟车目标车辆的目标车车速v2,计算两车的车速差v
ref
和速差变化率a
ref
;智能驾驶控制器计算和判断两车的靠近趋势,当相对车速v
ref
大于零且速差变化
率a
ref
持续一定时间小于零时,判断在一定时间后两车速差v
ref
将小于零,两车有靠近趋势;其中,v
ref =v2-v1,a
ref = v
ref /dt;当本车与跟车目标车具有靠近趋势时,纵向规划提前减小加速度a,减少动力输出。
14.进一步地,智能驾驶控制器计算和判断两车的靠近趋势,同时满足以下条件判断在一定时间后两车速差将小于零,两车有靠近趋势:条件1:本车与跟车目标之间的跟车距离不大于一定值;条件2:相对速差大于零,v
ref =v2-v1;条件3:相对速差变化率小于零,a
ref = v
ref /dt。
15.本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以上所述的提高经济性的跟车方法的步骤。
16.本发明有益技术效果为:智能辅助驾驶系统通过摄像头和雷达识别到跟车目标的距离、车速等信息,并结合本车的车速信息,计算两车相对的车速v
ref
,根据相对车速的动态变化计算相对车速变化率a
ref
,预测本车与目标车辆的相对纵向距离l的变化。在确保本车与跟车目标之间的跟车距离不大于一定值时,当相对车速有由正变为负的趋势时,即使两车当前正在远离,但速差将在一定时间内变为负,因此判断为两车将有靠近趋势;本车提前限制加速度,避免加速一段时间后才判断出两车距离缩小,再执行减速。提前限制加速,可在一定程度上节省燃油消耗。
附图说明
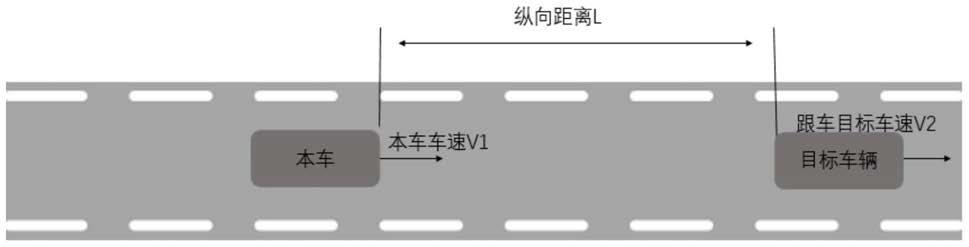
17.说明书附图图1为本发明公开的跟车示意图;图2为本发明公开的一种提高经济性的跟车系统示意图;图3为本发明公开的一种提高经济性的跟车方法流程图。
具体实施方式
18.下面结合附图对本发明做详细说明。
19.如图1至图3所示,本发明公开的一种提高经济性的跟车方法,包括以下步骤,步骤1)摄像头识别出跟车目标车辆,并输出对应的纵向距离和速度;雷达识别出跟车目标车辆,并输出对应的纵向距离和速度;智能驾驶控制器融结合摄像头和雷达的的跟车目标数据,通过一定算法融合计算出实际跟车目标车辆的纵向距离l和目标车车速v2。
20.步骤2)底盘通过转速传感器识别车轮转速,并根据车轮转速计算输出本车车速v1。
21.步骤3)智能驾驶控制器根据本车车速v1与跟车目标车辆的目标车车速v2,计算两车的车速差vref和速差变化率aref;步骤4)智能驾驶控制器计算和判断两车的靠近趋势,同时满足以下条件判断在一定时间后两车速差将小于零,两车有靠近趋势:
条件1:本车与跟车目标之间的跟车距离不大于一定值;条件2:相对速差大于零,vref =v2-v1;条件3:相对速差变化率小于零,aref = vref /dt。
22.步骤5)当本车与跟车目标车具有靠近趋势时,纵向规划提前减小加速度a,减少动力输出。
23.通过减少动力输出,可在一定程度上节约燃油消耗,达到提高燃油经济性的目的。当车速差vref》0, 速差变化率 aref《0,且根据计算推测,车速差vref会在一定时间内变为小于零时,纵向提前减小加速度规划a,提前减小动力输出,减小燃油消耗,提高燃油经济性。
24.参见图2和图3,本发明公开的一种提高经济性的跟车系统,包括摄像头、雷达、智能驾驶控制器、底盘和转速传感器;要实现具备提高燃油经济性的跟车方法,需要本车能识别跟车目标车辆及其动态参数(包括距离和车速等),因此车辆需要具备精度较高的雷达和摄像头;同时摄像头和雷达识别到目标信息后,本车智能驾驶控制器需要对其进行融合计算处理,得出用于进一步规划加速的相对位置和速差关系。除了传感器,需要智能驾驶控制器具备传感融合、纵向规划、纵向控制的功能,只有在各层级都实现了对应的功能和性能需求,方能实现跟车经济性。
25.摄像头识别出跟车目标,并输出对应的纵向距离和速度;雷达识别出跟车目标,并输出对应的纵向距离和速度;传感器识别上,需要摄像头和雷达较准确的识别出跟车目标,并能输出满足一定精度的跟车目标的纵向距离及纵向速度;智能驾驶控制器融合计算出实际跟车目标车辆的纵向距离l和目标车车速v2;底盘通过转速传感器识别车轮转速,并根据车轮转速计算输出本车车速v1;根据传感融合的结果,结合本车的传感器识别和输出的本车车速信息,控制器计算出本车与跟车目标车辆之间的动态关系,包括跟车距离,相对速差等。
26.智能驾驶控制器根据本车车速v1与跟车目标车辆的目标车车速v2,计算两车的车速差vref和速差变化率aref;其中,vref =v2-v1,aref = vref /dt;智能驾驶控制器计算和判断两车的靠近趋势,同时满足以下条件判断在一定时间后两车速差将小于零,两车有靠近趋势:条件1:本车与跟车目标之间的跟车距离不大于一定值;条件2:相对速差大于零,vref =v2-v1;条件3:相对速差变化率小于零,aref = vref /dt。
27.本发明公开的一种提高经济性的跟车系统,纵向规划上,根据本车与跟车目标车辆的相对速差的变化情况,提前预判本车与跟车目标车辆之间是否有靠近的趋势;以作为是否需要继续加速跟车,或提前抑制车辆加速。当本车与跟车目标车辆具有靠近趋势时,应根据相对速差的变化率大小,提前减小本车加速度。
28.纵向控制上,应及时响应纵向规划发出的动力加速请求,真实的反应在动力系统动力输出上,通过提前适当的减小发动机扭矩输出,减小燃油消耗,提高燃油经济性。
29.本发明公开的技术方案考虑了本车与跟车目标之间相对速度的变化,根据相对速度的变化情况,提起预判本车与跟车目标车辆之间的位置关系变化(既:是否有靠近趋势),再根据位置关系的变化调节加速度规划和控制。
30.在上述说明书中,已经通过参考特定的示例描述了本发明的主旨内容。然而,在不脱离如权利要求书所阐述的本发明的主旨内容的情况下,可以进行各种修改和改变。本说明书中的附图是说明性而不是限制性的。因此,本发明的主旨范围应当由权利要求及其符合法律规定的等效形式或实体确定,而非仅由所描述的示例确定。在本说明书任何方法或过程权利要求中所阐述的任何步骤可以按任何次序或次序组合执行,并不受限于所述权利要求中所给出的示例性特定次序。任何设备权利要求中所阐述的模块、单元、系统都可以按照任意的排列组合、组装、配置,并且不限于在所述权利要求中程序的特定组成、组装或配置形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1