一种车辆行驶控制方法、装置和电子设备与流程
本发明涉及通信,特别涉及一种车辆行驶控制方法、装置和电子设备。
背景技术:
1、车辆的辅助驾驶功能中,车道保持功能又细分为普通的车道保持和车道居中行驶功能,这两种功能的实现都要依靠车辆的前视相机去识别车辆前方的车道线,依据两侧的车道边线计算出车辆是否在车道内或者车辆居中行驶的参考线,来控制车辆。
2、现有的车道线居中控制方案中,车道的边线信息全部是由视觉图像中提取的车道线的位置信息,转变为基于车辆坐标系或者相机位置坐标系的方程,最后通过两条边线取中心曲线或者通过单条边线做偏移,得到车辆的控制轨迹路线,进而控制车辆。
3、但是在现有方案中,在使用单个车载相机进行车辆车道保持控制时,由于单目相机本身对于车道线的定位精度有限,通常只能达到亚米级精度,会导致车辆控制轨迹曲线的精度不高,但是使用双目相机增加定位精度则会增加整车成本。
技术实现思路
1、本发明实施例提供一种车辆行驶控制方法、装置和电子设备,用以解决现有技术中,使用单目相机进行线性拟合形成的车辆控制轨迹曲线进行车辆控制,导致控制精度不高的问题。
2、为了解决上述技术问题,本发明实施例提供如下技术方案:
3、本发明实施例提供一种车辆行驶控制方法,包括:
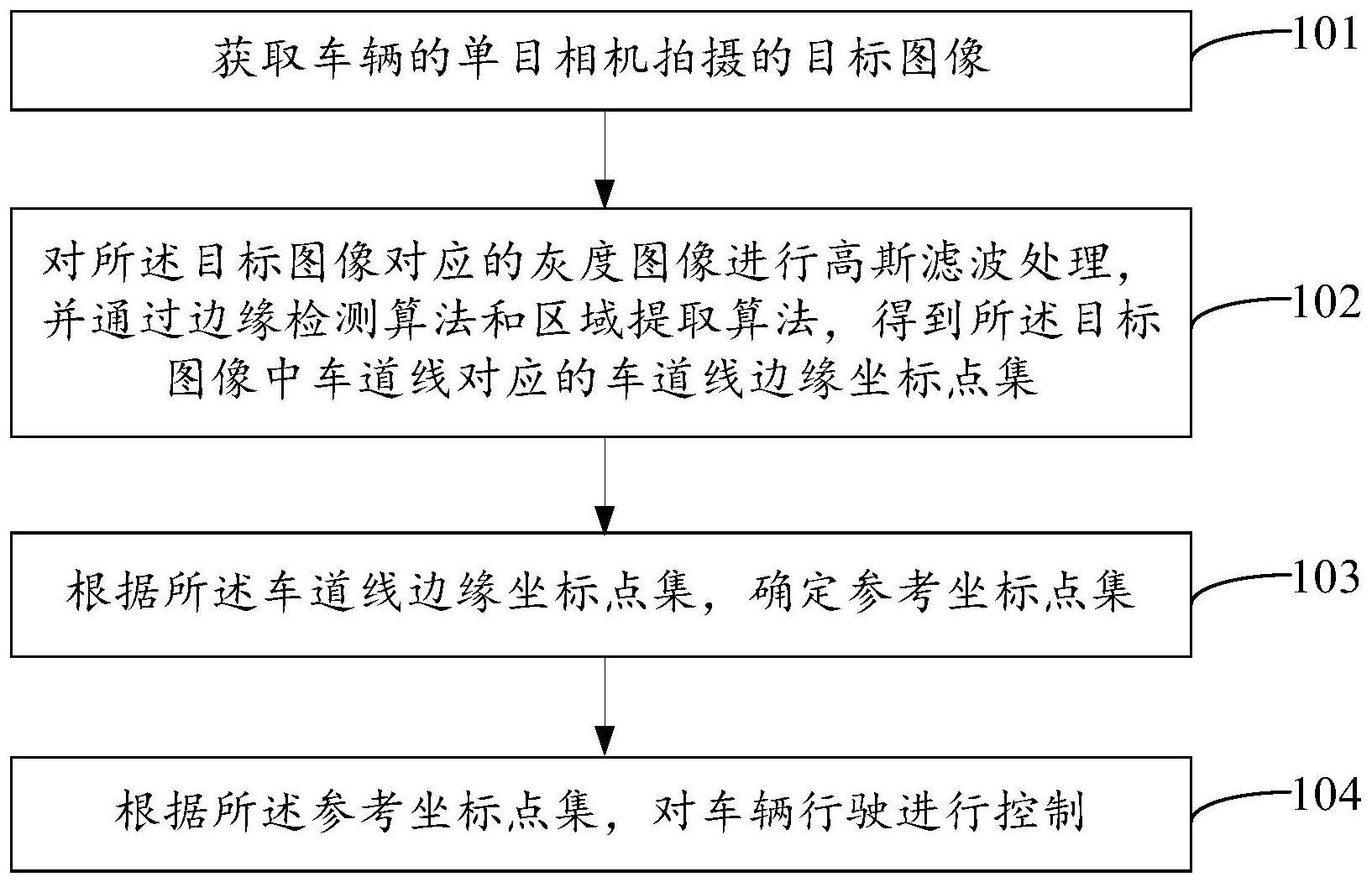
4、获取车辆的单目相机拍摄的目标图像;
5、对所述目标图像对应的灰度图像进行高斯滤波处理,并通过边缘检测算法和区域提取算法,得到所述目标图像中车道线对应的车道线边缘坐标点集;
6、根据所述车道线边缘坐标点集,确定参考坐标点集;
7、根据所述参考坐标点集,对车辆行驶进行控制。
8、可选地,对所述目标图像对应的灰度图像进行高斯滤波处理,并通过边缘检测算法和区域提取算法,得到所述目标图像中车道线对应的车道线边缘坐标点集,包括:
9、基于rgb信息获取所述目标图像对应的灰度图像;
10、对所述灰度图像进行高斯滤波处理,得到处理后的灰度图像;
11、利用边缘检测算法和提取算法对所述处理后的灰度图像进行处理,得到所述目标图像中车道线对应的车道线边缘坐标点集;
12、其中,所述车道线边缘坐标点集为所述单目相机中cmos阵列坐标点集。
13、可选地,根据所述车道线边缘坐标点集,确定参考坐标点集,包括:
14、利用插值方式,对所述车道线边缘坐标点集进行坐标修补,得到修补后的车道线边缘坐标点集;
15、根据修补后的车道线边缘坐标点集中的左车道线坐标点集和右车道线坐标点集,确定参考坐标点集。
16、可选地,根据修补后的车道线边缘坐标点集中的左车道线坐标点集和右车道线坐标点集,确定参考坐标点集,包括:
17、将位于所述车道线边缘坐标点集中目标行的左车道线坐标点的横坐标和右车道线坐标点的横坐标进行聚类处理和均值处理,得到所述目标行的左参考点坐标和右参考点坐标;
18、根据所述目标行的左参考点坐标和右参考点坐标,确定所述目标行的参考坐标;
19、将所述车道线边缘坐标点集中全部目标行的参考坐标按照行顺序进行排列,得到所述参考坐标点集。
20、可选地,根据所述参考坐标点集,对车辆行驶进行控制,包括:
21、在所述单目相机中标定与所述车辆的纵向中心线对应的控制点;
22、根据所述控制点、目标参考坐标点集以及预设的控制方式,对车辆行驶进行控制;
23、其中,所述目标参考坐标点集为当前时间的预设时长内对应的参考坐标点集。
24、可选地,所述控制点包括第一控制点和第二控制点;
25、根据所述控制点、目标参考坐标点集以及预设的控制方式,对车辆行驶进行控制,包括:
26、根据位置控制点、车辆偏航角、目标参考坐标点集以及预设的控制方式,对车辆行驶进行控制;
27、其中,所述位置控制点为所述第一控制点和所述第二控制点中行坐标较大的控制点;
28、所述车辆偏航角是根据所述第一控制点和所述第二控制点确定的。
29、可选地,在所述单目相机中标定与所述车辆的纵向中心线对应的控制点,包括:
30、通过静态标定方式,在所述单目相机中标定与所述车辆的纵向中心线对应的控制点的列坐标;
31、和/或,
32、通过动态标定方式,在所述单目相机中标定与所述车辆的纵向中心线对应的控制点的行坐标。
33、本发明实施例还提供一种车辆行驶控制装置,包括:
34、获取模块,用于获取车辆的单目相机拍摄的目标图像;
35、处理模块,用于对所述目标图像对应的灰度图像进行高斯滤波处理,并通过边缘检测算法和区域提取算法,得到所述目标图像中车道线对应的车道线边缘坐标点集;
36、确定模块,用于根据所述车道线边缘坐标点集,确定参考坐标点集;
37、控制模块,用于根据所述参考坐标点集,对车辆行驶进行控制。
38、可选地,处理模块,包括:
39、获取单元,用于基于rgb信息获取所述目标图像对应的灰度图像;
40、第一处理单元,用于对所述灰度图像进行高斯滤波处理,得到处理后的灰度图像;
41、第二处理单元,用于利用边缘检测算法和提取算法对所述处理后的灰度图像进行处理,得到所述目标图像中车道线对应的车道线边缘坐标点集;
42、其中,所述车道线边缘坐标点集为所述单目相机中cmos阵列坐标点集。
43、可选地,所述确定模块,包括:
44、修补单元,用于利用插值方式,对所述车道线边缘坐标点集进行坐标修补,得到修补后的车道线边缘坐标点集;
45、第一确定单元,用于根据修补后的车道线边缘坐标点集中的左车道线坐标点集和右车道线坐标点集,确定参考坐标点集。
46、可选地,所述第一确定单元,具体用于:
47、将位于所述车道线边缘坐标点集中目标行的左车道线坐标点的横坐标和右车道线坐标点的横坐标进行聚类处理和均值处理,得到所述目标行的左参考点坐标和右参考点坐标;
48、根据所述目标行的左参考点坐标和右参考点坐标,确定所述目标行的参考坐标;
49、将所述车道线边缘坐标点集中全部目标行的参考坐标按照行顺序进行排列,得到所述参考坐标点集。
50、可选地,所述控制模块,包括:
51、标定单元,用于在所述单目相机中标定与所述车辆的纵向中心线对应的控制点;
52、控制单元,用于根据所述控制点、目标参考坐标点集以及预设的控制方式,对车辆行驶进行控制;
53、其中,所述目标参考坐标点集为当前时间的预设时长内对应的参考坐标点集。
54、可选地,所述控制点包括第一控制点和第二控制点;
55、所述控制单元,具体用于:
56、根据位置控制点、车辆偏航角、目标参考坐标点集以及预设的控制方式,对车辆行驶进行控制;
57、其中,所述位置控制点为所述第一控制点和所述第二控制点中行坐标较大的控制点;
58、所述车辆偏航角是根据所述第一控制点和所述第二控制点确定的。
59、可选地,所述标定单元,具体用于
60、通过静态标定方式,在所述单目相机中标定与所述车辆的纵向中心线对应的控制点的列坐标;
61、和/或,
62、通过动态标定方式,在所述单目相机中标定与所述车辆的纵向中心线对应的控制点的行坐标。
63、本发明实施例还提供一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上中任一项所述的车辆行驶控制方法的步骤。
64、本发明实施例还提供一种可读存储介质,所述可读存储介质上存储有程序,所述程序被处理器执行时实现如上中任一项所述的车辆行驶控制方法中的步骤。
65、本发明的有益效果是:
66、本发明方案,通过对获取到的单目相机拍摄的目标图像所对应的灰度图像进行高斯滤波处理,并通过边缘检测算法和区域提取算法,得到所述目标图像中车道线对应的车道线边缘坐标点集,根据所述车道线边缘坐标点集,确定参考坐标点集,绕开线性拟合形成的车辆控制轨迹曲线的过程,并通过参考坐标点集,对车辆行驶进行控制,消除由于根据车辆控制轨迹曲线进行车辆控制导致的控制精度不高的问题。
- 还没有人留言评论。精彩留言会获得点赞!