用HD矩阵式前照灯根据距离投影图像对象的方法及系统与流程
用hd矩阵式前照灯根据距离投影图像对象的方法及系统
技术领域
1.本发明涉及一种用车辆的高分辨率的hd矩阵式前照灯根据距离投影图像对象的方法。此外,还要求保护一种在其上实施该方法的系统。
背景技术:
2.除了仅照亮车辆前部地带之外,车辆的高分辨率(英文“high definition”,或缩写为“hd”)的主前照灯还能够借助适合的控制装置用来显示额外的信息。因此,能够将辅助驾驶员的并且涉及对车辆进行控制的信息(例如作为标志)投影到车辆前部地带中。
3.文件de 102015224313 a1描述了一种具有多个光源的光源模块,每个光源自身对应于一种图样图案。这些光源能够彼此独立地接通和关闭。
4.文件de 102017114903 a1也公开了一种具有用于照亮同一表面的两个投影装置的前照灯,其中这两个投影装置分别具有多个光点源(lichtpunktquelle)。通过停用这两个投影装置中的其相应的照亮区域不重叠的光点源来实现所投影的标志的较高的亮度和清晰度。
5.文件de 102017115974 a1提出了一种照明设备,该照明设备具有用于将标志投影到行车道上的两个前照灯,其中每个前照灯具有多个光点源。将要投影的标志划分成两个子图像,这两个子图像被指配给相应的前照灯。
6.借助这种hd矩阵式前照灯同样可以实现的是,将具有认知价值并且伴随一定过程的图像序列(例如就像通过有关车辆启动的播放场景展示的图像序列那样)投影到车辆前部地带。为了使这种场景成像,例如可以在相应的主前照灯(缩写为“hsw”)中整合有自己的光模块,该光模块尽管使用hd矩阵作为光源,但是却配备有自己的成像系统并且与hsw的特性相比在照亮车辆前部地带的情况下在形式上具有更好的成像特性。然而,这种整合在hsw中的光模块通常将其景深确定为略大于四米的远距离范围,在该远距离范围内例如所投影的字母才变得可读取。在距离车辆仅一米或更近的壁上,投影反而会显得非常模糊。
7.在此背景下,本发明的目的在于,提出一种用于用hd矩阵式前照灯进行投影的方法,其中使具有字母或标志的要投影的图像根据投影可能性在车辆前部地带中可读取或可识别地成像。此外,应提供一种在其上能实施该方法的系统。
技术实现要素:
8.为了实现上述目的,提出了一种根据距离来进行hd矩阵式前照灯投影的方法,其中将至少一个光模块布置在至少一个hd矩阵式前照灯中,该至少一个hd矩阵式前照灯被包括在车辆中,该至少一个hd矩阵式前照灯的光源具有带有多个光点源的显示器。该至少一个光模块将由控制装置预先设定的图像投影到车辆前部地带中。该车辆前部地带由近距离区域和远距离区域组合而成,其中该至少一个光模块的第一光模块使得由该控制装置预先设定的该图像清晰地显示在该远距离区域中。至少一个传感器沿投影方向对该车辆前部地带进行扫描以探测位于地面上的至少一个对象。取决于该扫描的结果,对该预先设定的图
像的投影进行以下情况划分:
9.●
如果在该近距离区域中探测到至少一个壁或类似于壁的对象,那么在该至少一个hd矩阵式前照灯中仅布置有该第一光模块的情况下,该至少一个光模块的第一光模块执行使得该预先设定的图像的简化图像的投影投射到该壁或该类似于壁的对象上;
10.●
如果探测到空置的近距离区域并且在远距离区域中探测到壁或类似于壁的对象,那么该至少一个光模块的第一光模块执行使得该预先设定的图像的投影投射到该壁或该类似于壁的对象上;
11.●
如果探测到空置的车辆前部地带,那么该至少一个光模块的第一光模块执行投射预先设定的图像的地面-投影。
12.应理解的是,以上提到的情况是相互排斥的。例如,在近距离区域中存在壁或类似于壁的对象的情况下是否额外地在远距离区域中也存在壁或类似于壁的对象是无足轻重的,这是因为沿投影方向,近距离区域中的壁或类似于壁的对象总是会遮盖远距离区域中的壁或类似于壁的对象。在近距离区域中有壁或类似于壁的对象的情况下,总是尝试将图像完全投影到其上。此外,壁或类似于壁的对象在本发明的意义上应被理解为投影面,该投影面具有足以用于使预先设定的图像成像的表面。
13.距由该至少一个hd矩阵式前照灯构成的车辆的主前照灯最多两米的距离或最多四米的距离应被理解为近距离区域的示例。相对应地,大于两米或大于四米的距离应被理解为远距离区域的示例。相应的示例也应被理解为取决于该至少一个传感器的扫描距离:如果传感器例如仅可以扫描到最多达两米的距离,那么有利地将近距离区域与远距离区域之间的界线设置为两米。
14.该至少一个光模块的第一光模块也被称为性能模块(performance-modul),这是因为与用于近光灯或远光灯的光学系统相比,该性能模块具有呈图像中更小像素的形式的更好的成像品质,同时就相应的对比度而言成像品质更高并且强度更高。如果朝向地面投影,那么性能模块为此提供足够的强度,同时精细地显示图像。
15.通过根据本发明将预先设定的图像(例如字样或标记)修改为该预先设定的图像的简化图像(例如标志),在近距离区域中,即使在显示模糊的情况下也能够有利地识别出这个标志,这是因为这个标志与该字样相比还可以显示得更大,并且这个标志具有不太复杂的图像设计以及在不清晰时不太模糊的图像设计。
16.由控制装置预先设定的图像还可以包含变化的图像信息,例如其可以被设想为通过在离开或到达家用车库时播放相应的动画。相应的动画被嵌入在伴随着相应的驾驶情况的场景中,例如以相应的主题句“离开家”或“提前回家”表示。
17.在根据本发明的方法的一个实施方式中,为了在该近距离区域中进行投影,在该至少一个hd矩阵式前照灯中布置该至少一个光模块的第二光模块。该至少一个光模块的第二光模块使得由该控制装置预先设定的该图像清晰地显示在该近距离区域中。该至少一个光模块的第二光模块与该至少一个光模块的第一光模块相比照亮更大的角度范围。关于该车辆前部地带的扫描的该情况划分被改变使得,在该近距离区域中探测到至少一个壁或类似于壁的对象时关闭该至少一个光模块的第一光模块并且该至少一个光模块的第二光模块执行将该预先设定的图像投影到该壁或该类似于壁的对象上。
18.该至少一个光模块的第二光模块使预先设定的图像的投影以其与该至少一个光
模块的第一光模块相比更大的角度范围来更大地成像。因此,可以有利地更好地识别出图像。此外,该至少一个光模块的第二光模块由此比该至少一个光模块的第一光模块具有针对近距离区域的更好的景深,其中针对远距离区域的情况相反。
19.由此,根据本发明的方法有利地能够根据与投影面的间距以及根据该至少一个光模块的光学特性来实现预先设定的图像的尽可能清晰且可识别的再现。
20.在根据本发明的方法的另一个实施方式中,如果无法针对近距离区域布置该至少一个光模块的第二光模块或者无法由控制装置创建预先设定的图像的简化图像,那么针对近距离区域禁止对该预先设定的图像的投影。
21.在根据本发明的方法的又一个实施方式中,针对该至少一个光模块的第一光模块选择照亮+/-10度的角度范围,并且针对该至少一个光模块的第二光模块选择照亮+/-20度的角度范围。由此,通过该至少一个光模块的第二光模块使图像中的相应像素是在该至少一个光模块的第一光模块的情况下的两倍大并且比其暗四倍地成像。这尤其在根据本发明的情况划分中被证实为是有利的,这是因为由此在近距离区域中削弱了自眩光并且该图像获得了令观察者感到舒适的大小,而不会由此有损图像品质,同时在远距离区域中发挥该至少一个光模块的第一光模块的优势(视场角较小,同时像差较少)。而通过就更短的距离而言可设想地设计该至少一个光模块的第一光模块的光学特性并且因此聚焦于近距离区域(这会导致放弃该至少一个光模块的第二光模块的布置),可能对为该至少一个光模块的第一光模块提出的驾驶任务的成像要求(例如去眩光、性能、颜色)产生决定性的缺点。
22.在根据本发明的方法的另一个实施方式中,针对由该控制装置预先设定的该图像选择多个字符的序列,并且针对由该控制装置预先设定的该简化图像仅选择数个字符或一个字符。对象(例如车辆轮廓)的显示在此是有利的,这是因为该显示相对于字母或非常精细的图像是更容易识别的并且即使在投影面之前存在障碍物也就其成像品质方面保持稳定。
23.在根据本发明的方法的还另一个实施方式中,该至少一个传感器选自下表:超声波传感器、激光雷达(lidar)、雷达、中央驾驶员辅助控制装置的相机。超声波传感器例如应检查最多达两米的距离处是否存在壁或类似于壁的对象。中央驾驶员辅助控制装置(本领域技术人员简称为zfas)的相机承担尤其对车辆前部地带的远距离区域的扫描,以确定在车辆前方是否有适合的投影面。通常,该预先设定的图像在远距离区域中到壁或类似于壁的对象上的投影随着距离的增大而越来越不稳定,因此在这种情况下应执行地面-投影。为此,zfas相机应提供所需的信息。
24.根据本发明的方法一般有利地提供在角视界最高为+/-10度的hd系统的情况下有关处理方法的规程。对于在行驶时间期间超出用作主前照灯范围的这种hd系统而言,同样有利的是通过根据本发明的情况划分(该情况划分在必要时建议预先设定的图像的简化图像)来防止近场中的无法识别的投影。
25.此外,要求保护一种用于根据距离来进行hd矩阵式前照灯投影的系统,该系统包括:控制装置、布置在车辆上的至少一个hd矩阵式前照灯、布置在该至少一个hd矩阵式前照灯中的至少一个光模块、以及对车辆前部地带进行扫描的至少一个传感器。该至少一个hd前照灯具有带有多个光点源的显示器作为光源。该至少一个光模块被配置成用于将由该控制装置预先设定的图像投影到由近距离区域和远距离区域组合而成的车辆前部地带中。该
至少一个光模块的第一光模块被配置成用于将由该控制装置预先设定的该图像在光学上清晰地显示在该远距离区域中。该至少一个传感器被配置成用于沿投影方向对该车辆前部地带进行扫描以探测位于地面上的至少一个对象。该控制装置附加地被配置成取决于该扫描的结果来对该预先设定的图像的投影进行以下情况划分:
26.●
在该近距离区域中探测到至少一个壁或类似于壁的对象时,在该至少一个hd矩阵式前照灯中仅布置有该第一光模块的情况下,该至少一个光模块的第一光模块执行使得该预先设定的图像的简化图像的投影投射到该壁或该类似于壁的对象上;
27.●
在探测到空置的近距离区域并且在远距离区域中探测到壁或类似于壁的对象时,该至少一个光模块的第一光模块执行使得该预先设定的图像的投影投射到该壁或该类似于壁的对象上;
28.●
在探测到空置的车辆前部地带时,该至少一个光模块的第一光模块执行投射该预先设定的图像的地面-投影。
29.在根据本发明的系统的一个设计方案中,为了在该近距离区域中对该预先设定的图像进行投影,在该至少一个hd矩阵式前照灯中布置有该至少一个光模块的第二光模块。该至少一个光模块的第二光模块被配置成用于将由该控制装置预先设定的该图像清晰地显示在该近距离区域中。此外,该至少一个光模块的第二光模块被配置成与该至少一个光模块的第一光模块相比照亮更大的角度范围。对预先设定的图像进行投影的情况划分被改变使得,在该近距离区域中探测到至少一个壁或类似于壁的对象时关闭该至少一个光模块的第一光模块并且该至少一个光模块的第二光模块执行将该预先设定的图像投影到该壁或该类似于壁的对象上。
30.在根据本发明的系统的又一个设计方案中,该至少一个光模块的第一光模块呈现出照亮+/-10度的角度范围,并且该至少一个光模块的第二光模块呈现出照亮+/-20度的角度范围。
31.在根据本发明的系统的另一个设计方案中,由该控制装置预先设定的该图像包括多个字符的序列,并且该预先设定的图像的由该控制装置简化的图像仅包括数个字符或一个字符。
32.在根据本发明的系统的还另一个设计方案中,该至少一个传感器选自下表:超声波传感器、中央驾驶员辅助控制装置的相机、激光雷达、雷达。
33.根据本发明的情况划分由此有利地为相应空置且适合的车辆前部地带提供对预先设定的图像的尽可能最好的投影方式。由此,针对每种情况都能实现最佳的成像品质,并且根据可能的设计方案在有疑问的情况下防止出现劣质成像。
附图说明
34.本发明的其他优点和设计方案从说明书和附图中得出。
35.不言而喻,在不脱离本发明范围的情况下,以上提到的这些特征以及仍将在以下说明的特征不仅能够在相应给出的组合中使用,而且还可以在其他组合中或者单独地使用。
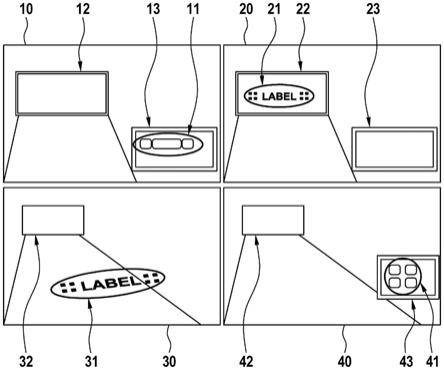
36.图1示意性地示出了根据本发明的方法的一个实施方式的不同的投影情况。
具体实施方式
37.在图1中示出了根据本发明的方法的一个实施方式的不同的投影情况。选择车辆在黑暗中靠近家用车库12、22、32、42来作为示例,其中借助于至少一个光模块中的第一光模块(并且例如非前照灯)仅显示由控制装置所导致的预先设定的图像的投影11、21、31、41。在第一种情况10中,示出了通过根据本发明的情况划分而要避免的、借助于至少一个光模块中的第一光模块投射的预先设定的图像在约一米距离的近壁13(例如朝一侧移动的庭院大门)上的模糊的投影11。车辆在此朝向大约四米距离处的远壁12(例如车库门)移动。在第二种情况20中,根据本发明,避免将预先设定的图像投影到近壁23上并且替代于此选择大约四米的远壁22。投影21是通过至少一个光模块中的第一光模块完全清晰且可识别地成像的,并且在车辆直接朝向壁22移动时,其并未在投影路径中受位于侧方的近壁23干扰。在第三种情况30中,与前两种情况10、20相比,车辆又略更远地处于远壁32之前(例如十米)。由于车辆前部地带的远距离区域直至远壁32具有空置表面并且针对这种情况30在车辆前部地带中例如没有朝向一侧移动的庭院大门,因此通过根据本发明的情况划分导致该预先设定的图像的地面-投影31。在第四种情况40中,近壁43与车辆的主前照灯的距离为大致一米半并且因此无法实现如在第三种情况30中的地面-投影。更远的壁42距离过远而无法以足够的品质执行投影。因此,根据本发明,通过该至少一个光模块中的第一光模块在近壁43上成像出预先设定的图像的简化图像41,其尽管在光学上是不清晰或模糊的,但是通过就其回溯到预先设定的标志(在此示例为四个以方形布置的点)而言的这种简化是可识别的。
38.附图标记清单
39.10投影到近壁上的简图
40.11投影到近壁上的模糊的图像
41.12远壁(大约4m)
42.13近壁(大约1m)
43.20投影到远壁上的简图
44.21投影到远壁上的图像
45.22远壁(大约4m)
46.23近壁(大约1m)
47.30投影到地面上的简图
48.31投影到地面上(大约5m)的图像
49.32更远的壁(大约10m)
50.40投影到近壁上的简化图像的简图
51.41投影到近壁上的简化图像的模糊投影
52.42更远的壁(大约10m)
53.43近壁(大约1.5m)
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1