驾驶辅助装置的制作方法
1.本发明涉及驾驶辅助装置的技术领域。
背景技术:
2.作为这种装置,例如,提出一种装置,该装置在本车辆的路线前方存在对本车辆请求停止的减速对象,且驾驶员释放加速踏板时,进行减速辅助控制(参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2020-097337号公报
6.在专利文献1所记载的技术中,仅考虑在本车辆的路线前方最接近本车辆的减速对象。在此,例如作为减速对象的信号灯的设置间隔依赖于道路构造(例如交叉路口的位置)。存在以下这样的技术问题点:在车辆的路线前方设置有第一信号灯,在其后侧设置有第二信号灯的情况下,且第一信号灯与第二信号灯的间隔比较短的情况下,若在车辆从第一信号灯通过之后,第二信号灯被识别为减速对象,则关于第二信号灯的减速辅助可能会延迟。
技术实现要素:
7.发明所要解决的问题
8.本发明是鉴于上述问题点而完成的,其课题在于,提供一种驾驶辅助装置,即使在车辆的路线前方的两个减速对象比较接近地存在的情况下,该驾驶辅助装置也能使车辆适当地减速。
9.用于解决问题的方案
10.本发明的一个方案的驾驶辅助装置具备:推定单元,在车辆的路线前方存在作为第一减速对象的信号灯,并从所述车辆观察在比所述第一减速对象靠后侧存在第二减速对象,且所述车辆的驾驶员松开加速踏板的情况下,推定第一推定车速和第二推定车速,该第一推定车速是与所述第一减速对象相应的第一目标位置处的所述车辆的推定车速,该第二推定车速是与所述第二减速对象相应的第二目标位置处的所述车辆的推定车速;以及控制单元,在所述第一推定车速比第一规定值大,且所述第二推定车速比第二规定值小的情况下,将所述车辆控制为朝向所述第二目标位置自动地减速。
附图说明
11.图1是表示应用实施方式的减速辅助控制的场面的一个例子的图。
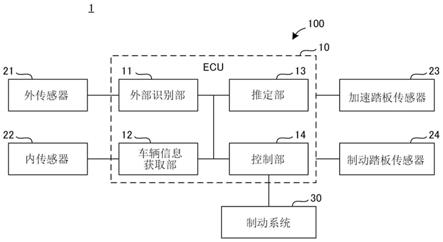
12.图2是表示实施方式的驾驶辅助装置的构成的框图。
13.图3是表示实施方式的驾驶辅助装置的动作的流程图。
14.图4是表示由实施方式的减速辅助控制实现的车速变化的一个例子的图。
15.图5是表示应用实施方式的减速辅助控制的场面的另一个例子的图。
16.图6是表示应用实施方式的减速辅助控制的场面的另一个例子的图。
17.附图标记说明:
[0018]1……
车辆,10
……
ecu,11
……
外部识别部,12
……
车辆信息获取部, 13
……
推定部,14
……
控制部,21
……
外传感器,22
……
内传感器,23
……
加速踏板传感器,24
……
制动踏板传感器,30
……
制动系统,100
……
驾驶辅助装置。
具体实施方式
[0019]
参照图1至图6对驾驶辅助装置的实施方式进行说明。首先,对实施方式的驾驶辅助装置100(参照图2)所进行的减速辅助控制的概要进行说明,之后,进行驾驶辅助装置100的具体的说明。
[0020]
(减速辅助控制)
[0021]
减速辅助控制可以在车辆(例如图1的车辆1)的路线前方存在减速对象,且本车辆的驾驶员松开加速踏板时(换言之,未踩下加速踏板时)被执行。若减速辅助控制被执行,则车辆成为比较平缓地减速的缓减速行驶。
[0022]“减速对象”是请求车辆的减速或停止的对象。作为减速对象的具体例子,可举出灯色为“红”或“黄”的信号灯、本车辆的前方的其他车辆(在此,其他车辆既可以正在行驶,也可以正在停车或泊车)、转弯路、停止线(例如,设有暂时停止标志的停止线)等。就是说,减速对象可以包括限制车辆的行驶的物体、障碍物以及道路构造。
[0023]
参照图1对减速辅助控制具体地进行说明。在图1所示的场面中,在车辆1 的路线前方设置有信号灯51。并且,从车辆1观察在比信号灯51靠后侧设置有信号灯53。
[0024]
也可以是,在通过驾驶辅助装置100将例如灯色为“红”的信号灯51识别为减速对象的情况下,通过减速辅助控制以与信号灯51相应的目标位置(例如停止线52附近)处的车辆1的车速接近目标车速(例如时速0km等)的方式使车辆1自动地减速。就是说,在该情况下,可以进行减速辅助控制,该减速辅助控制是使车辆1朝向与灯色为“红”的信号灯51相应的目标位置自动地减速的控制。
[0025]
例如,在车辆1的前方存在作为沿与车辆1的行进方向相同的方向行驶的其他车辆的先行车辆(未图示),且车辆1正在接近先行车辆的情况(即,先行车辆比车辆1慢的情况)下,驾驶辅助装置100可以将先行车辆识别为减速对象。在该情况下,可以通过减速辅助控制以与先行车辆相应的目标位置(例如从先行车辆的后端离开规定距离的位置)处的车辆1的车速接近目标车速(例如,车辆1与先行车辆的相对车速成为零这样的车速等)的方式使车辆1自动地减速。就是说,在该情况下,可以进行减速辅助控制,该减速辅助控制是使车辆1朝向与先行车辆相应的目标位置自动地减速的控制。
[0026]
需要说明的是,在该情况下,相对于作为减速对象的先行车辆的目标位置 (即,相对的目标位置)既可以根据进行减速辅助控制的期间中的先行车辆的车速变化而变化,也可以不变。另一方面,绝对的目标位置随着先行车辆移动而移动。
[0027]
再者,在信号灯51的灯色为“黄”的情况下,根据车辆1与交叉路口c之间的距离,车辆1的驾驶员有时要在信号灯51的跟前(例如停止线52的附近) 停止,有时要从交叉路口c通过。在前者的情况(即,驾驶员要在信号灯51的跟前停止的情况)下,可以在驾驶员停止加速踏板的踩下时(换言之,在驾驶员松开加速踏板时)进行减速辅助控制,该减速辅助控制
是使车辆1朝向与信号灯51相应的目标位置自动地减速的控制。
[0028]
在后者的情况(即,驾驶员要从交叉路口c通过的情况)下,有时会产生以下这样的问题。在车辆1从交叉路口c通过之后,有时会判定是否针对作为减速对象的信号灯53进行减速辅助控制。此时,若信号灯51与信号灯53的距离比较近,则即使判定为针对信号灯53进行减速辅助控制,减速辅助恐怕也会延迟(换言之,难以通过减速辅助控制使车辆1适当地减速或停止)。
[0029]
因此,该驾驶辅助装置100被配置为:例如在识别出信号灯51和信号灯53 这两方的情况下,能同时期地执行是否进行将信号灯51作为减速对象的减速辅助控制的判定和是否进行将信号灯53作为减速对象的减速辅助控制的判定。如果如此构成,则能在例如车辆1从信号灯51通过之前(换言之,在车辆1进入交叉路口c之前)判定是否进行将信号灯53作为减速对象的减速辅助控制。因此,即使在信号灯51与信号灯53的距离比较近的情况下,也能适当地进行针对信号灯53的减速辅助。
[0030]
(驾驶辅助装置)
[0031]
参照图2至图4对驾驶辅助装置100进行说明。在图2中,驾驶辅助装置 100被配置为具备ecu(electronic control unit:电子控制单元)10。就是说,在本实施方式中,ecu10的功能的至少一部分被用作驾驶辅助装置100的至少一部分。作为驾驶辅助装置100的至少一部分的ecu10具有外部识别部11、车辆信息获取部12、推定部13以及控制部14来作为在ecu10的内部逻辑上被实现的处理块或物理上被实现的处理电路。
[0032]
外部识别部11基于作为例如毫米波雷达、摄像机、lidar(light detectionand ranging:激光雷达)等的外传感器21的输出(例如物标信息、图像信息等),识别存在于车辆1的周围的物体(例如静止物、移动体)的例如位置、速度、形状、颜色等中的至少一个。在此,物体的位置可以由相对于车辆1的相对位置表示。同样地,物体的速度可以由相对于车辆1的相对速度表示。需要说明的是,关于物体的识别方法,可以应用现有的各种方案,因此省略对其详情的说明。
[0033]
车辆信息获取部12基于作为例如速度传感器、加速度传感器等的内传感器 22的输出来获取车辆1的车辆信息(例如,速度、加速度等表示车辆1的行为的信息等)。关于车辆信息的获取方法,可以应用现有的各种方案,因此省略对其详情的说明。
[0034]
推定部13在车辆1的路线前方存在作为第一减速对象的信号灯(例如,图 1的信号灯51),并且从车辆1观察在比第一减速对象靠后侧存在第二减速对象(例如,图1的信号灯53),且车辆1的驾驶员松开加速踏板的情况下,推定第一推定车速和第二推定车速,该第一推定车速是与第一减速对象相应的第一目标位置(例如,图1的停止线52附近)处的车辆1的推定车速,该第二推定车速是与第二减速对象相应的第二目标位置(例如,图1的停止线54附近) 处的车辆1的推定车速。
[0035]
需要说明的是,推定部13可以根据由外部识别部11得出的识别结果来识别上述第一减速对象和第二减速对象的存在。此外,推定部13可以根据由加速踏板传感器23得出的检测结果来识别驾驶员松开了加速踏板。
[0036]
推定部13例如也可以如以下这样对推定车速进行推定。也可以是,推定部 13基于车辆1的当前的车速、从车辆1到目标位置的距离、减速辅助控制的减速度(换言之,假定为车辆1通过减速辅助控制被减速)来运算(推定)车辆1 到达目标位置时的车速,并将该运算
(推定)出的车速作为推定车速。在此,减速辅助控制的减速度是允许通过减速辅助控制产生的减速度范围内的减速度。
[0037]
控制部14在第一推定车速比第一规定值大,且第二推定车速比第二规定值小的情况下,将车辆1控制为朝向与第二减速对象相应的第二目标位置自动地减速(具体而言,制动系统30)。
[0038]
在此,“第一规定值”是决定是否将车辆1控制为朝向与第一减速对象相应的第一目标位置自动地减速(换言之,是否针对第一减速对象进行减速辅助控制)的值。同样地,“第二规定值”是决定是否将车辆1控制为朝向与第二减速对象相应的第二目标位置自动地减速(换言之,是否针对第二减速对象进行减速辅助控制)的值。第一规定值和第二规定值分别既可以是预先确定的固定值,也可以是与某些物理量或参数相应的可变值。
[0039]
在通过减速辅助控制使车辆1的车速接近时速0km的情况(换言之,使车辆1停止的情况)下,第一规定值可以被设定为例如在第一目标位置处能通过车辆1的驾驶员对制动踏板进行操作(即,通过踩踏制动踏板)而使车辆1在第一目标位置附近安全地停止的车速。在通过减速辅助控制使车辆1的车速接近比时速0km大的目标车速的情况(换言之,不使车辆1停止但使车辆1减速的情况)下,第一规定值可以被设定为例如能避免车辆1与第一减速对象的碰撞,并且车辆1能安全地从第一目标位置通过的车速。
[0040]
同样地,在通过减速辅助控制使车辆1的车速接近时速0km的情况(换言之,使车辆1停止的情况)下,第二规定值可以被设定为例如在第二目标位置处能通过车辆1的驾驶员对制动踏板进行操作(即,通过踩踏制动踏板)而使车辆1在第二目标位置附近安全地停止的车速。在通过减速辅助控制使车辆1 的车速接近比时速0km大的目标车速的情况(换言之,不使车辆1停止但使车辆1减速的情况)下,第二规定值可以被设定为例如能避免车辆1与第二减速对象的碰撞,并且车辆1能安全地从第二目标位置通过的车速。需要说明的是,第二规定值既可以与第一规定值相同,也可以与第一规定值不同。
[0041]
就外传感器21、内传感器22、加速踏板传感器23以及制动踏板传感器24 而言,既可以是驾驶辅助装置100单独具备的,也可以是与其他的装置、系统共用的。由于可以在制动系统30应用现有的各种方案,因此省略对其详情的说明。
[0042]
除了图1和图2之外,还参照图3的流程图对驾驶辅助装置100的动作进行说明。在此,对信号灯作为减速对象的情况进行说明,但驾驶辅助装置100 的动作不限定于此。
[0043]
在图3中,驾驶辅助装置100的外部识别部11识别车辆1的路线前方的信号灯(步骤s101)。在此,设为通过步骤s101的处理来识别信号灯51和信号灯53(参照图1)。就是说,在步骤s101的处理中,外部识别部11将存在于车辆1的路线前方的物体(例如,信号灯)识别为减速对象候选。驾驶辅助装置100判定作为在车辆1的路线前方最接近车辆1的信号灯的信号灯51的灯色是否为“红”或“黄”(步骤s102)。就是说,在步骤s102的处理中,判定被识别为减速对象候选的物体是否为减速对象。需要说明的是,步骤s102的处理既可以通过外部识别部11来进行,也可以通过推定部13来进行,还可以通过与外部识别部11和推定部13不同的其他的处理块或处理电路来进行。
[0044]
在步骤s102的处理中,在判定为信号灯51的灯色既不是“红”也不是“黄
”ꢀ
(即,灯色为“绿”)的情况下(步骤s102:否),信号灯51不符合减速对象,因此不允许通过减速辅助控制进行的车辆1的自动的减速(相当于图3的“系统减速”)(步骤s108)。之后,可以在经过
了规定时间(例如,数十毫秒至数百毫秒等)之后,进行步骤s101的处理。就是说,也可以是,图3所示的动作以与规定时间相应的周期反复进行。
[0045]
在步骤s102的处理中,在判定为信号灯51的灯色为“红”或“黄”的情况下(步骤s102:是),信号灯51被识别为减速对象。接着,基于由加速踏板传感器23得出的检测结果来判定车辆1的驾驶员是否松开了加速踏板(换言之,是否为加速器关闭)(步骤s103)。需要说明的是,步骤103的处理既可以通过推定部13来进行,也可以通过与推定部13不同的其他的处理块或处理电路来进行。
[0046]
在步骤s103的处理中,在判定为驾驶员未松开加速踏板(换言之,驾驶员正踩下加速踏板)的情况下(步骤s103:否),由于驾驶员没有减速意思,因此不允许通过减速辅助控制进行的车辆1的自动的减速(步骤s108)。之后,可以在经过了规定时间之后,进行步骤s101的处理。
[0047]
在步骤s103的处理中,在判定为驾驶员松开了加速踏板的情况下(步骤 s103:是),推定部13推定与信号灯51相应的第一目标位置(例如,图1的停止线52附近)处的车辆1的第一推定车速。如上述那样,推定部13假定为车辆1通过减速辅助控制被减速(换言之,假定为车辆1以规定的减速度进行减速)来推定第一推定车速。然后,控制部14判定第一推定车速是否为第一阈值(相当于上述的“第一规定值”)以下(步骤s104)。
[0048]
在步骤s104的处理中,在判定为第一推定车速为第一阈值以下的情况下(步骤s104:是),允许通过减速辅助控制进行的车辆1的自动的减速(步骤s107)。其结果是,控制部14以使车辆1朝向与信号灯51相应的第一目标位置自动地减速的方式对制动系统30进行控制。就是说,针对作为减速对象的信号灯51 进行减速辅助控制。
[0049]
在步骤s104的处理中,在判定为第一推定车速比第一阈值大的情况下(步骤s104:否),驾驶辅助装置100判定在车辆1的路线前方,从车辆1观察位于信号灯51的后侧的信号灯53的灯色是否为“红”或“黄”(步骤s105)。就是说,在步骤s105的处理中,与上述的步骤s102的处理同样地,判定被识别为减速对象候选的物体是否为减速对象。需要说明的是,步骤s105的处理既可以通过外部识别部11来进行,也可以通过推定部13来进行,还可以通过与外部识别部11和推定部13不同的其他的处理块或处理电路来进行。
[0050]
在步骤s105的处理中,在判定为信号灯53的灯色既不是“红”也不是“黄
”ꢀ
(即,灯色为“绿”)的情况下(步骤s105:否),信号灯53不符合减速对象,因此不允许通过减速辅助控制进行的车辆1的自动的减速(步骤s108)。之后,可以在经过了规定时间之后,进行步骤s101的处理。
[0051]
在步骤s105的处理中,在判定为信号灯53的灯色为“红”或“黄”的情况下(步骤s105:是),信号灯53被识别为减速对象。接着,推定部13推定与信号灯53相应的第二目标位置(例如,图1的停止线54附近)处的车辆1 的第二推定车速。如上述那样,推定部13假定为车辆1通过减速辅助控制被减速(换言之,假定为车辆1以规定的减速度进行减速)来推定第二推定车速。然后,控制部14判定第二推定车速是否为第二阈值(相当于上述的“第二规定值”)以下(步骤s106)。
[0052]
在步骤s106的处理中,在判定为第二推定车速比第二阈值大的情况下(步骤s106:否),不允许通过减速辅助控制进行的车辆1的自动的减速(步骤s108)。之后,可以在经过了规定时间之后,进行步骤s101的处理。
[0053]
在步骤s106的处理中,在判定为第二推定车速为第二阈值以下的情况下(步骤s106:是),允许通过减速辅助控制进行的车辆1的自动的减速(步骤s107)。其结果是,控制部14以使车辆1朝向与信号灯53相应的第二目标位置自动地减速的方式对制动系统30进行控制。就是说,针对作为减速对象的信号灯53 进行减速辅助控制。
[0054]
在此,参照图4对针对作为减速对象的信号灯53的减速辅助控制进行说明。在图4的(a)和图4的(b)中,位置p0设为在减速辅助控制被允许的时间点的车辆1的位置。位置p2是作为减速对象的信号灯51的位置,位置p1是与作为减速对象的信号灯51相应的第一目标位置(例如,停止线52附近的位置)。位置p4是作为减速对象的信号灯53的位置,位置p3是与作为减速对象的信号灯53相应的第二目标位置(例如,停止线54附近的位置)。
[0055]
在针对作为减速对象的信号灯53的减速辅助控制中,例如图4的(a)所示那样,也可以是,控制部14以在减速辅助控制被允许的紧后(换言之,从在车辆1从作为减速对象的信号灯51通过之前开始),对车辆1进行减速的方式对制动系统30进行控制。或者,也可以是,在针对作为减速对象的信号灯53 的减速辅助控制中,例如图4的(b)所示那样,控制部14以在车辆1从作为减速对象的信号灯51通过之后,对车辆1进行减速的方式对制动系统30进行控制。在该情况下,在位置p0处车辆1的驾驶员松开加速踏板,因此,即使在针对作为减速对象的信号灯53的减速辅助控制开始之前,车辆1也可以由于例如车辆1的轮胎与路面的摩擦等而减速。
[0056]
在图3的动作中,在车辆1的驾驶员松开了加速踏板之后,通过制动踏板传感器24检测到踩踏制动踏板的情况下,既可以不允许通过减速辅助控制进行的车辆1的自动的减速,也可以是,以与驾驶员的制动踏板的踩踏相应的减速度(例如,驾驶员请求减速度)比减速辅助控制的减速度小为条件,允许通过减速辅助控制进行的车辆1的自动的减速。
[0057]
(技术效果)
[0058]
如上述那样,驾驶辅助装置100被配置为能在车辆1从第一减速对象(例如,图1的信号灯51)通过之前判定是否针对第二减速对象执行减速辅助控制。因此,根据驾驶辅助装置100,即使在第一减速对象与第二减速对象之间的距离比较短的情况下,也能针对第二减速对象适当地进行减速辅助控制。就是说,例如在车辆1从第一减速对象通过之后判定是否针对第二减速对象执行减速辅助控制的比较例中,在第一减速对象与第二减速对象之间的距离比较短的情况下,针对第二减速对象的减速辅助控制的开始有时会延迟。与此相对,在该驾驶辅助装置100中,能在车辆1从第一减速对象通过之前判定是否针对第二减速对象执行减速辅助控制,因此即使在第一减速对象与第二减速对象之间的距离比较短的情况下,也能针对第二减速对象适当地进行减速辅助控制。
[0059]
<第一变形例>
[0060]
参照图5对第一减速对象为信号灯,第二减速对象为转弯路的情况下的驾驶辅助装置100的动作进行说明。在图5中,在车辆1的路线前方存在信号灯 51,从车辆1观察在信号灯51的后侧存在转弯路。在此,在转弯路为减速对象的情况下,与转弯路相应的目标位置例如可以是与转弯路的入口相当的位置55。
[0061]
在与上述的步骤s101的处理同样的处理中,外部识别部11识别信号灯51 和转弯路。在与上述的步骤s102的处理同样的处理中,驾驶辅助装置100判定信号灯51和转弯路中的最接近车辆1的信号灯51的灯色是否为“红”或“黄”。在判定为信号灯51的灯色既不是“红”也不是“黄”(即,灯色为“绿”)的情况下,不允许通过减速辅助控制进行的车辆1的自动的减速。
[0062]
在判定为信号灯51的灯色为“红”或“黄”的情况下,信号灯51被识别为减速对象。接着,在与上述的步骤s103的处理同样的处理中,基于由加速踏板传感器23得出的检测结果来判定车辆1的驾驶员是否松开了加速踏板(换言之,是否为加速器关闭)。
[0063]
在判定为驾驶员未松开加速踏板(换言之,驾驶员正踩下加速踏板)的情况下,不允许通过减速辅助控制进行的车辆1的自动的减速。
[0064]
在判定为驾驶员松开了加速踏板的情况下,在与上述的步骤s104的处理同样的处理中,推定部13推定与作为减速对象的信号灯51相应的第一目标位置 (例如,图5的停止线52附近)处的车辆1的第一推定车速。然后,在与上述的步骤s105的处理同样的处理中,控制部14推定第一推定车速是否为第一阈值以下。
[0065]
在判定为第一推定车速为第一阈值以下的情况下,允许通过减速辅助控制进行的车辆1的自动的减速。其结果是,控制部14以使车辆1朝向与作为减速对象的信号灯51相应的第一目标位置自动地减速的方式对制动系统30进行控制。就是说,针对作为减速对象的信号灯51进行减速辅助控制。
[0066]
在判定为第一推定车速比第一阈值大的情况下,推定部13推定与作为减速对象的转弯路相应的第二目标位置(例如,图5的位置55)处的车辆1的第二推定车速。需要说明的是,也可以是,例如在基于从导航装置(未图示)获取到的车辆1的路线信息而判定为车辆1进入上述转弯路的情况下,上述转弯路被识别为减速对象,推定部13推定第二推定车速。然后,在与上述的步骤s106 的处理同样的处理中,控制部14判定第二推定车速是否为第二阈值以下。
[0067]
在判定为第二推定车速比第二阈值大的情况下,不允许通过减速辅助控制进行的车辆1的自动的减速。另一方面,在判定为第二推定车速为第二阈值以下的情况下,允许通过减速辅助控制进行的车辆1的自动的减速。其结果是,控制部14以使车辆1朝向与作为减速对象的转弯路相应的第二目标位置自动地减速的方式对制动系统30进行控制。就是说,针对作为减速对象的转弯路进行减速辅助控制。
[0068]
<第二变形例>
[0069]
参照图6对第一减速对象为信号灯,第二减速对象为先行车辆56的情况下的驾驶辅助装置100的动作进行说明。在图6中,在车辆1的路线前方存在信号灯51,从车辆1观察在信号灯51的后侧存在先行车辆56。在先行车辆56作为减速对象的情况下,与先行车辆56相应的目标位置例如可以是从先行车辆56 的后端离开规定距离的位置57。
[0070]
在与上述的步骤s101的处理同样的处理中,外部识别部11识别信号灯51 和先行车辆56。在与上述的步骤s102的处理同样的处理中,驾驶辅助装置100 判定信号灯51和先行车辆56中的最接近车辆1的信号灯51的灯色是否为“红”或“黄”。在判定为信号灯51的灯色既不是“红”也不是“黄”(即,灯色为“绿”)的情况下,不允许通过减速辅助控制进行的车辆1的自动的减速。
[0071]
在判定为信号灯51的灯色为“红”或“黄”的情况下,信号灯51被识别为减速对象。接着,在与上述的步骤s103的处理同样的处理中,基于由加速踏板传感器23得出的检测结果来判定车辆1的驾驶员是否松开了加速踏板(换言之,是否为加速器关闭)。
[0072]
在判定为驾驶员未松开加速踏板(换言之,驾驶员正踩下加速踏板)的情况下,不允许通过减速辅助控制进行的车辆1的自动的减速。
[0073]
在判定为驾驶员松开了加速踏板的情况下,在与上述的步骤s104的处理同样的处理中,推定部13推定与作为减速对象的信号灯51相应的第一目标位置 (例如,图6的停止线52附近)处的车辆1的第一推定车速。然后,在与上述的步骤s105的处理同样的处理中,控制部14判定第一推定车速是否为第一阈值以下。
[0074]
在判定为第一推定车速为第一阈值以下的情况下,允许通过减速辅助控制进行的车辆1的自动的减速。其结果是,控制部14以使车辆1朝向与作为减速对象的信号灯51相应的第一目标位置自动地减速的方式对制动系统30进行控制。就是说,针对作为减速对象的信号灯51进行减速辅助控制。
[0075]
在判定为第一推定车速比第一阈值大的情况下,推定部13推定与作为减速对象的先行车辆56相应的第二目标位置(例如,图6的位置57)处的车辆1的第二推定车速。需要说明的是,也可以是,例如在基于先行车辆56相对于车辆 1的相对位置和相对速度而运算出的ttc(time to collision:碰撞时间)比允许时间小的情况下,先行车辆56被识别为减速对象,推定部13推定第二推定车速。然后,在与上述的步骤s106的处理同样的处理中,控制部14判定第二推定车速是否为第二阈值以下。
[0076]
在判定为第二推定车速比第二阈值大的情况下,不允许通过减速辅助控制进行的车辆1的自动的减速。另一方面,在判定为第二推定车速为第二阈值以下的情况下,允许通过减速辅助控制进行的车辆1的自动的减速。其结果是,控制部14以使车辆1朝向与作为减速对象的先行车辆56相应的第二目标位置自动地减速的方式对制动系统30进行控制。就是说,针对作为减速对象的先行车辆56进行减速辅助控制。
[0077]
<第三变形例>
[0078]
在从由作为外传感器21的摄像机拍摄到的图像中识别信号灯的灯色的情况下,如果是白天,则信号灯的壳体大多被拍摄得比较清晰,但在夜间,信号灯的壳体大多不清晰,而只有信号灯的灯光被拍摄得比较清晰。此外,即使在白天,当信号灯被阳光照射时有时也难以判别亮灯的颜色。就是说,根据天气、时间段,信号灯的灯色恐怕会被错误地识别。
[0079]
因此,也可以是,驾驶辅助装置100的外部识别部11在识别例如信号灯等存在于车辆1的周围的物体时,按识别出的每个物体判定相对于识别结果的概率。需要说明的是,可以在相对于识别结果的概率的判定方法中应用现有的各种方案,因此省略对其详情的说明。
[0080]
也可以是,驾驶辅助装置100的控制部14在针对作为减速对象的信号灯51 或信号灯53允许了减速辅助控制的情况下,以利用与相对于信号灯51或信号灯53的识别结果的概率相应的减速度使车辆1地自动的减速的方式对制动系统 30进行控制。具体而言,也可以是,在相对于信号灯51和信号灯53中的一方的信号灯的识别结果的概率高的情况下,与相对于该一方的信号灯的识别结果的概率低的情况相比,控制部14以利用大的减速度使车辆1自动地减速的方式对制动系统30进行控制。换言之,也可以是,在相对于上述一方的信号灯的识别结果的概率低的情况下,与相对于该一方的信号灯的识别结果的概率高的情况相比,控制部14以利用小的减速度使车辆1自动地减速的方式对制动系统30 进行控制。
[0081]
在上述的图3所示的动作中,例如在步骤s104的处理中,在判定为第一推定车速为
第一阈值以下的情况下(步骤s104:是),允许通过减速辅助控制进行的车辆1的自动的减速(步骤s107)。其结果是,也可以是,控制部14对制动系统30进行控制,使得车辆1朝向与作为减速对象的信号灯51相应的第一目标位置,以与相对于作为减速对象的信号灯51的识别结果的概率相应的减速度自动地减速。
[0082]
例如,在步骤s106的处理中,在判定为第二推定车速为第二阈值以下的情况下(步骤s106:是),允许通过减速辅助控制进行的车辆1的自动的减速(步骤s107)。其结果是,控制部14对制动系统30进行控制,使得车辆1朝向与作为减速对象的信号灯53相应的第二目标位置,以与相对于作为减速对象的信号灯53的识别结果的概率相应的减速度自动地减速。
[0083]
需要说明的是,根据相对于物体(例如信号灯)的识别结果的概率而变更的物理量或参数不限于减速度,例如也可以是减速开始定时、减速量、减速梯度等。此外,根据相对于物体的识别结果的概率而变更的物理量或参数不限于一个,也可以是多个(例如,也可以变更速度和减速开始定时)。
[0084]
以下,对从以上进行了说明的实施方式和变形例导出的发明的各种方案进行说明。
[0085]
发明的一个方案的驾驶辅助装置具备:推定单元,在车辆的路线前方存在作为第一减速对象的信号灯,并且从所述车辆观察在比所述第一减速对象靠后侧存在第二减速对象,且所述车辆的驾驶员松开加速踏板的情况下,推定第一推定车速和第二推定车速,该第一推定车速是与所述第一减速对象相应的第一目标位置处的所述车辆的推定车速,该第二推定车速是与所述第二减速对象相应的第二目标位置处的所述车辆的推定车速;以及控制单元,在所述第一推定车速比第一规定值大,且所述第二推定车速比第二规定值小的情况下,将所述车辆控制为朝向所述第二目标位置自动地减速。
[0086]
在上述的实施方式中,“推定部13”相当于“推定单元”的一个例子,“控制部14”相当于“控制单元”的一个例子。在上述的实施方式中,“灯色为
‘
红’或
‘
黄’的信号灯51”相当于“作为第一减速对象的信号灯”的一个例子,“灯色为
‘
红’或
‘
黄’的信号灯53”、“转弯路”以及“先行车辆56”相当于“第二减速对象”的一个例子。
[0087]
在该驾驶辅助装置中,也可以是,所述第二减速对象是信号灯、转弯处、停止线或其他车辆。
[0088]
在该驾驶辅助装置中,也可以是,所述控制单元在所述第一推定车速比第一规定值大,且所述第二推定车速比第二规定值小的情况下,将所述车辆控制为从所述车辆从所述第一减速对象通过之前开始朝向所述第二目标位置自动地减速。
[0089]
在该驾驶辅助装置中,也可以是,所述控制单元在所述第一推定车速比第一规定值大,且所述第二推定车速比第二规定值小的情况下,将所述车辆控制为在所述车辆从所述第一减速对象通过之后朝向所述第二目标位置自动地减速。
[0090]
在该驾驶辅助装置中,也可以是,所述推定单元假定为所述车辆以规定的减速度进行减速来推定所述第一推定车速和所述第二推定车速。
[0091]
在该驾驶辅助装置中,也可以是,该驾驶辅助装置具备识别所述第一减速对象和所述第二减速对象的识别单元,所述控制单元在所述第一推定车速比第一规定值大,且所述第二推定车速比第二规定值小的情况下,将所述车辆控制为朝向所述第二目标位置以与
通过所述识别单元进行的所述第二减速对象的识别的概率相应的减速度自动地减速。在上述的实施方式中,“外部识别部11”相当于“识别单元”的一个例子。
[0092]
本发明不限于上述的实施方式,可以在不违反从权利要求书的范围和说明书整体读取的发明的主旨或思想的范围内进行适当变更,与这样的变更相伴的驾驶辅助装置也仍包括在本发明的技术的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1