前后轮驱动车辆的制作方法
1.本发明涉及一种前后轮驱动车辆,其中前轮和后轮被构造成被驱动。
背景技术:
2.以往,作为以能够驱动前轮和后轮的电动马达为驱动源的前后轮驱动车辆,已知有日本未经审查的专利申请公开第2004-58700号中记载的电动车辆。电动车辆的驱动装置包括电动马达、延伸穿过设置在电动马达的中心部分处的管状转子轴的前驱动轴、与前驱动轴同轴设置的后驱动轴、设置在前后驱动轴之间的前后轮差动机构以及设置在前后轮差动机构和电动马达之间的行星齿轮机构。前后轮差速机构包括:差速器壳体,电动马达的旋转力通过行星齿轮降低旋转速度之后被传递至该差速器壳体;小齿轮轴,该小齿轮轴附接到差速器壳体;多个小齿轮,该多个小齿轮可旋转地支撑在小齿轮轴上;以及一对侧齿轮,该一对侧齿轮与所述多个小齿轮啮合,使得该一对侧齿轮的齿轮轴垂直于所述多个小齿轮的齿轮轴延伸。前驱动轴连接到一个侧齿轮,而后驱动轴连接到另一个侧齿轮。电动马达包括附接到转子轴的外周的转子和围绕转子的外周的定子。转子和定子封装在马达箱内。
技术实现要素:
3.在jp 2004-58700a中公开的车辆中,前驱动轴和后驱动轴与电动马达同轴地设置,因此,该马达箱的一部分位于前驱动轴和后驱动轴下方。在此,与诸如ff车辆、fr车辆等两轮驱动车相比,其中前后轮被构造成被驱动的前后轮驱动车辆往往在未铺砌的崎岖路面上行驶。因此,必需确保足够的最小离地间隙。但是,如果马达箱的一部分位于前驱动轴和后驱动轴下方,则最小离地间隙由马达箱决定,这可能导致无法确保足够的最小离地间隙。
4.本发明提供一种前后轮驱动车辆,该前后轮驱动车辆具有最小离地间隙不太可能受到作为驱动源的电动马达的限制的构造。
5.本发明的一个方面涉及一种前后轮驱动车辆,其中前轮和后轮被构造成被驱动。前后轮驱动车辆包括电动马达,该电动马达包括:马达轴,当向电动马达供应电流时,该马达轴旋转;变速机构,该变速机构被构造成将马达轴的旋转速度改变为多个级别并且被构造成从中间输出构件输出所产生的旋转;第一输出旋转轴,该第一输出旋转轴将已经传递到中间输出构件的电动马达的驱动力传递到前轮侧和后轮侧中的一个;以及第二输出旋转轴,该第二输出旋转轴将已经传递到中间输出构件的电动马达的驱动力传递到前轮侧和后轮侧中的另一个。第一输出旋转轴和第二输出旋转轴与中间输出构件同轴地设置。电动马达被布置成使得马达轴的旋转轴线定位成与中间输出构件以及第一和第二输出旋转轴的旋转轴线平行并且在中间输出构件以及第一和第二输出旋转轴的旋转轴线的竖直上方。
6.根据本发明的上述方面,可以在包括电动马达作为驱动源的前后轮驱动车辆中容易地确保足够的最小离地间隙。
附图说明
7.下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中相同的附图标记表示相同的元素,并且其中:
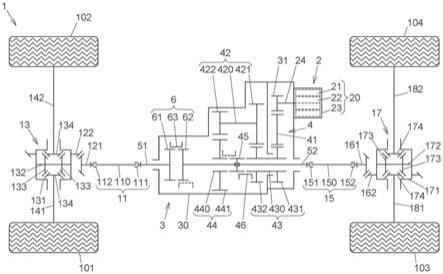
8.图1是根据第一实施例的前后轮驱动车辆的驱动系统的示意构造图;
9.图2是示出根据第一实施例的驱动力分配装置的一部分的构造的构造图;
10.图3是根据第二实施例的前后轮驱动车辆的驱动系统的示意构造图;
11.图4是示出根据第二实施例的驱动力分配装置的一部分的构造的构造图;
12.图5是根据第三实施例的前后轮驱动车辆的驱动系统的示意构造图;
13.图6是示出根据第三实施例的驱动力分配装置的一部分的构造的构造图;
14.图7是根据第四实施例的前后轮驱动车辆的驱动系统的示意构造图;以及
15.图8是示出根据第四实施例的驱动力分配装置的一部分的构造的构造图。
具体实施方式
16.第一实施例
17.将参考图1和图2描述本发明的第一实施例。注意,提供以下描述的实施例作为具体示例,并且本发明的技术范围并不限于这些具体示例。
18.图1是根据本发明的第一实施例的前后轮驱动车辆的驱动系统的示意构造图。图2是示出前后轮驱动车辆中的驱动力分配装置的一部分的构造的构造图。
19.前后轮驱动车辆1包括作为驱动源的电动马达2和驱动力分配装置3,该驱动力分配装置3将电动马达2的驱动力分配给左右前轮101、102侧以及左右后轮103、104侧。在以下描述中,“前侧”是指前后轮驱动车辆1在车辆前后方向上的前侧,而“后侧”是指前后轮驱动车辆1的车辆前后方向上的后侧。
20.电动马达2例如是三相交流马达,除了通过从未图示的逆变器装置供给的电流生成驱动力之外,该电动马达2还用作在减速期间生成再生电功率的发电机。电动马达2包括本体20,该本体20包括容纳定子21和转子22的马达箱23以及从马达箱23突出的马达轴24。定子21包括线圈,该线圈缠绕在围绕转子22的外周的铁心的每个齿周围并且通过供应给线圈的电流生成旋转磁场。转子22包括多个永磁体,该多个永磁体设置在外周处并且通过定子21中生成的磁场与马达轴24一体地旋转。马达轴24的旋转轴线平行于车辆前后方向。电动马达2的本体20附接到驱动力分配装置3的后侧上的端部。
21.前后轮驱动车辆1包括前推进轴11、连接到前推进轴11的前端部的小齿轮轴121、与小齿轮轴121啮合的环形齿轮122、包括与环形齿轮122一体地旋转的差速器壳体131的前差速器13以及作为用于将驱动力从驱动力分配装置3传递到左右前轮101、102的部件的左右驱动轴141、142。
22.前推进轴11在车辆前后方向上延伸并且将驱动力传递到前轮101、102侧。前推进轴11包括圆筒形或圆柱状轴部110以及接头111、112,诸如十字接头,所述接头111、112设置在轴部110的后侧和前侧上的相应端部处。小齿轮轴121经由接头112可摆动地连接到轴部110。前差速器13包括差速器壳体131、与差速器壳体131一体地旋转的小齿轮销132、可旋转地支撑在小齿轮销132上的多个小齿轮133和与该多个小齿轮133啮合的一对侧齿轮134。侧齿轮134分别不能旋转地连接到左右驱动轴141、142。
23.此外,前后轮驱动车辆1包括后推进轴15、连接到后推进轴15的后端部的小齿轮轴161、与小齿轮轴161啮合的环形齿轮162、包括与环形齿轮162一体地旋转的差速器壳体171的后差速器17以及左右驱动轴181、182,所述左右驱动轴181、182作为用于将驱动力从驱动力分配装置3传递到左右后轮103、104的部件。
24.后推进轴15在车辆前后方向上延伸并且将驱动力传递到后轮103、104侧。后推进轴15包括圆筒形或圆柱状轴部150以及设置在轴部150的前侧和后侧上的相应端部处的接头151、152。小齿轮轴161经由接头152可摆动地连接到轴部150。后差速器17包括差速器壳体171、与差速器壳体171一体地旋转的小齿轮销172、可旋转地支撑在小齿轮销172上的多个小齿轮173以及与该多个小齿轮173啮合的一对侧齿轮174。左右驱动轴181、182分别不可旋转地连接到一对侧齿轮174。
25.驱动力分配装置3能够在四轮驱动状态和两轮驱动状态之间切换,在该四轮驱动状态下,电动马达2的驱动力被分配给前推进轴11和后推进轴15,在该两轮驱动状态下,电动马达2的驱动力仅分配给后推进轴15。下面将详细描述驱动力分配装置3的构造。
26.驱动力分配装置3包括固定至车身的外壳30、固定至电动马达2的马达轴24的输入齿轮31、变速机构4、第一和第二输出旋转轴51、52以及断续离合器6。变速机构4可以将电动马达2的马达轴24的旋转速度改变为多个级别,并且从中间输出构件45输出所产生的旋转。第一输出旋转轴51将已经传递至中间输出构件45的电动马达2的驱动力传递至前轮101、102侧。第二输出旋转轴52将已经传递到中间输出构件45的电动马达2的驱动力传递至后轮103、104侧。
27.第一输出旋转轴51和第二输出旋转轴52的各自的端部在车辆前后方向上从外壳30突出。第一输出旋转轴51连接到前推进轴11,而第二输出旋转轴52连接到后推进轴15。更具体地,前推进轴11的接头111固定到第一输出旋转轴51的前端部,而轴部110通过接头111可摆动地连接到第一输出旋转轴51。此外,后推进轴15的接头151固定到第二输出旋转轴52的后端部,而轴部150通过接头151可摆动地连接到第二输出旋转轴52。
28.第一输出旋转轴51和第二输出旋转轴52沿着车辆前后方向与中间输出构件45同轴地设置。第一输出旋转轴51在车辆前后方向上延伸穿过中间输出构件45并且以相对于中间输出构件45不可旋转的方式装配到中间输出构件45。断续离合器6设置在第一输出旋转轴51和第二输出旋转轴52之间,在中间输出构件45的前面(前方)的位置处。
29.在本实施例中,如上所述,第一输出旋转轴51向前轮101、102侧传递驱动力,而第二输出旋转轴52向后轮103、104侧传递驱动力。然而,驱动力分配装置3在前后方向上的布置可以改变,使得第二输出旋转轴52向前轮101、102侧传递驱动力,而第一输出旋转轴51向后轮103、104侧传递驱动力。
30.变速机构4包括惰轮41、多级齿轮42、高速侧旋转构件43、低速侧旋转构件44、中间输出构件45和套筒46。惰轮41与输入齿轮31啮合。惰轮41的节圆直径大于输入齿轮31的节圆直径。多级齿轮42包括具有不同节圆直径的大径齿轮部421和小径齿轮部422,以及连接轴420,该连接轴420连接大径齿轮部421和小径齿轮部422使得大径齿轮部421和小径齿轮部422相对于彼此不可旋转。大径齿轮部421的节圆直径大于小径齿轮部422的节圆直径,并且大径齿轮部421与小径齿轮部422一体地旋转。
31.高速侧旋转构件43包括与惰轮41啮合的第一齿轮部431、与多级齿轮42的大径齿
轮部421啮合的第二齿轮部432、以及圆筒形中空连接轴430,该圆筒形中空连接轴430连接第一齿轮部431和第二齿轮部432使得第一齿轮部431和第二齿轮部432相对于彼此不可旋转。第一齿轮部431和第二齿轮部432固定到中空连接轴430的外周。低速侧旋转构件44包括与多级齿轮42的小径齿轮部422啮合的齿轮部441和圆筒形中空连接轴440。齿轮部441固定到中空连接轴440的外周。
32.中间输出构件45具有圆筒形状,其直径与高速侧旋转构件43的中空连接轴430和低速侧旋转构件44的中空连接轴440的直径相同。中间输出构件45设置在高速侧旋转构件43的中空连接轴430和低速侧旋转构件44的中空连接轴440之间。第二输出旋转轴52插入穿过高速侧旋转构件43的中空连接轴430和低速侧旋转构件44的中空连接轴440。高速侧旋转构件43和低速侧旋转构件44与第二输出旋转轴52同轴地设置。
33.套筒46是设置在中间输出构件45的外周上的圆筒形连接构件,并且通过未示出的致动器的功率在第一连接位置与第二连接位置之间在轴向上移动,其中在该第一连接位置处,套筒46连接中间输出构件45和高速侧旋转构件43的中空连接轴430使得中间输出构件45和中空连接轴430相对于彼此不可旋转,在该第二连接位置处,套筒46连接中间输出构件45和低速侧旋转构件44的中空连接轴440使得中间输出构件45和中空连接轴440相对于彼此不可旋转。在套筒46的内周表面处形成有内齿,在中间输出构件45的外周表面处和中空连接轴430、440的部分的相应的外周表面处形成有与套筒46的内齿啮合的外齿,所述部分在中间输出构件45附近。在图1中,位于第一连接位置处的套筒46由实线表示,而位于第二连接位置的套筒46用虚线表示。
34.中间输出构件45通过套筒46以相对于高速侧旋转构件43和低速侧旋转构件44中的一个不可旋转的方式连接到高速侧旋转构件43和低速侧旋转构件44中的一个。当套筒46位于第一连接位置处时,中间输出构件45和高速侧旋转构件43以相对于彼此不可旋转的方式连接,并且中间输出构件45和低速侧旋转构件44相对于彼此能够旋转。此外,当套筒46位于第二连接位置处时,中间输出构件45和低速侧旋转构件44以相对于彼此不可旋转的方式连接,而中间输出构件45和高速侧旋转构件43相对于彼此能够旋转。
35.在第一套筒46位于第一连接位置处的第一连接状态下,电动马达2的驱动力从马达轴24通过输入齿轮31、惰轮41、高速侧旋转构件43的第一齿轮部431和中空连接轴430以及套筒46被传递到中间输出构件45。另一方面,在套筒46位于第二连接位置处的第二连接状态下,电动马达2的驱动力从马达轴24通过输入齿轮31、惰轮41、高速侧旋转构件43的第一齿轮部431和第二齿轮部432、多级齿轮42的大径齿轮部421和小径齿轮部422、低速侧旋转构件44的齿轮部441和中空连接轴440以及套筒46被传递到中间输出构件45。
36.如上所述,在第二连接状态下,电动马达2的驱动力通过多级齿轮42被传递到中间输出构件45。因此,与第一连接状态相比,在从输入齿轮31到中间输出构件45的部分的减速比大,而电动马达2的驱动力被大幅度放大并且传递到中间输出构件45。因此,例如,在起动时以及在低速度范围内,前后轮驱动车辆1以第二连接状态行驶,而在中途以及在高速范围内,前后轮驱动车辆1以切换到第一连接状态的连接状态行驶。这使得电动马达2能够在宽的车速范围内在能量效率高的高效率范围内运行。
37.断续离合器6包括与第一输出旋转轴51一体地旋转的第一盘61、与第二输出旋转轴52一体地旋转的第二盘62、以及相对于第一盘61和第二盘62在轴向上移动的圆筒形套筒
63。在第一盘61和第二盘62处形成有与套筒63的内齿啮合的外齿。套筒63在连接位置与非连接位置之间移动,其中在该连接位置处,套筒63连接第一盘61和第二盘62移动,使得第一盘61和第二盘62相对于彼此不可旋转,在该非连接位置处,套筒63允许第一盘61和第二盘62由于未示出的致动器的动力相对于彼此旋转。在图1中,位于连接位置处的套筒63用实线表示,而位于非连接位置的套筒63用虚线表示。
38.当套筒63位于连接位置处时,第一输出旋转轴51和第二输出旋转轴52之间的差动运动受到限制,而中间输出构件45的旋转力被传递到第一输出旋转轴51和第二输出旋转轴52,这使得前后轮驱动车辆1进入四轮驱动状态。另一方面,当套筒63位于非连接位置处时,中间输出构件45的扭矩不会传递到第一输出旋转轴51,这使得前后轮驱动车辆1进入两轮驱动状态。断续离合器6能够在连接状态与断开状态之间切换,其中在该连接状态下,第一输出旋转轴51和第二输出旋转轴52以相对于彼此不可旋转的方式连接,在该断开状态下,根据例如用于在四轮驱动模式和两轮驱动模式之间进行选择的开关的操作状态,第一输出旋转轴51和第二输出旋转轴52断开,该开关由驾驶员操作。
39.图2示出电动马达2、输入齿轮31、惰轮41、高速侧旋转构件43的第一齿轮部431和第二齿轮部432与多级齿轮42的大径齿轮部421之间的啮合状态。在图2中,图纸的下侧是竖直下侧,而图纸的上侧是竖直上侧。
40.输入齿轮31与马达轴24一体地绕电动马达2的马达轴24的旋转轴线o1旋转。惰轮41包括齿轮齿41a,该齿轮齿41a与输入齿轮31的齿轮齿31a以及高速侧旋转构件43的第一齿轮部431的齿轮齿431a啮合。围绕旋转轴线o2旋转的惰轮41降低输入齿轮31的旋转速度并且将产生的旋转传递到高速侧旋转构件43的第一齿轮部431。
41.高速侧旋转构件43、低速侧旋转构件44和中间输出构件45围绕中间输出构件45以及第一和第二输出旋转轴51、52的旋转轴线o3旋转。在下文中,旋转轴线o3称为“输出旋转轴线o
3”。高速侧旋转构件43的第二齿轮部432的齿轮齿432a与多级齿轮42的大径齿轮部421的齿轮齿421a啮合。多级齿轮42经由电动马达2的驱动力绕旋转轴线o4旋转,驱动力从高速侧旋转构件43的第二齿轮部432传递。注意,在图2中,高速侧旋转构件43的第一齿轮部431和第二齿轮部432彼此重叠。
42.电动马达2被设置成使得马达轴24的旋转轴线o1定位成与输出旋转轴线o3平行并且位于输出旋转轴线o3的竖直上方。因此,与将电动马达2设置成使得马达轴24的旋转轴线o1与输出旋转轴线o3同轴地定位或与输出旋转轴线o3水平对准的情况相比,电动马达2被设置为在竖直上侧上。因此,前后轮驱动车辆1的最小离地间隙不太可能受到电动马达2的限制。因此,通过增加最小离地间隙可以增强前后轮驱动车辆1在崎岖路面上行驶的能力。
43.第二实施例
44.接下来,将参照图3和图4描述本发明的第二实施例。图3是示出根据本发明的第二实施例的前后轮驱动车辆1a的驱动系统的构造的示意构造图。图4是示出前后轮驱动车辆1a的驱动力分配装置3的一部分的构造的构造图。在图3和图4中,与参照图1和图2针对第一实施例描述的那些构件相同的构件被提供有与图1和图2中提供的那些相同的附图标记,并且省略其重复描述。
45.在第一实施例中,已经描述了电动马达2的驱动力通过惰轮41和高速侧旋转构件43的第一齿轮部431和第二齿轮部432被传递到多级齿轮42。然而,在第二实施例中,既没有
设置惰轮41也没有设置高速侧旋转构件43的第一齿轮部431,并且输入齿轮31与多级齿轮42的大径齿轮部421啮合。前后轮驱动车辆1a的其余部分的构造类似于根据第一实施例的前后轮驱动车辆1的构造。
46.在本实施例中,电动马达2的驱动力直接从输入齿轮31传递到多级齿轮42。在第一连接状态下,已经传递到多级齿轮42的电动马达2的驱动力通过高速侧旋转构件43从大径齿轮部421传递到中间输出构件45。另一方面,在第二连接状态下,已经传递到多级齿轮42的电动马达2的驱动力从小径齿轮部422通过低速侧旋转构件44被传递到中间输出构件45。因此,与在第一实施例中一样,与第一连接状态相比,在第二连接状态下,从输入齿轮31到中间输出构件45的部分的减速比很大,并且电动马达2的驱动力被大幅度放大,然后被传递到中间输出构件45。
47.如图4所示,电动马达2被设置成使得马达轴24的旋转轴线o1定位成与输出旋转轴线o3平行并且位于输出旋转轴线o3的竖直上方。因此,与在第一实施例中一样,前后轮驱动车辆1a的最小离地间隙不太可能受到电动马达2的限制。因此,通过增加最小离地间隙,可以增强前后轮驱动车辆1a在崎岖路面上行驶的能力。
48.此外,在本实施例中,由于输入齿轮31与多级齿轮42的大径齿轮部421啮合,因此与第一实施例相比,驱动力分配装置3在车辆宽度方向上长度更大,但在前后方向上长度更小。另外,由于高速侧旋转构件43的惰轮41和第一齿轮部431均未设置,所以驱动力分配装置3的重量减轻。注意,输入齿轮31可以被构造成与多级齿轮42的小径齿轮部422啮合。在这种情况下,根据大径齿轮部421和小径齿轮部422之间的半径差异,可以抑制驱动力分配装置3在车辆宽度方向上的尺寸增加。
49.第三实施例
50.接下来,将参照图5和图6描述本发明的第三实施例。图5是示出根据本发明的第三实施例的前后轮驱动车辆1b的驱动系统的构造的示意构造图。图6是示出前后轮驱动车辆1b的驱动力分配装置3的一部分的构造的构造图。在图5和图6中,与参照图1和图2针对第一实施例描述的那些部件相同的部件被提供有与图1和图2中提供的那些相同的附图标记,并且省略其重复描述。
51.在第一实施例和第二实施例中的每一个中,已经描述了前后轮驱动车辆1、1a仅仅包括电动马达2作为驱动源的情况。然而,根据第三实施例和稍后描述的第四实施例的前后轮驱动车辆1b、1c中的每一个都包括作为除了电动马达2之外的驱动源的发动机7。发动机7是内燃机,其中诸如汽油的液体燃料在气缸内燃烧以生成动力。
52.发动机7的驱动力从传动装置8的输出旋转轴84输入到驱动力分配装置3,同时通过传动装置8改变旋转速度。传动装置8包括离合器81和变速机构82。作为发动机7的输出旋转轴的曲轴71和变速机构82的输入旋转轴83通过离合器81连接和断开。发动机7和传动装置8纵向放置在电动马达2和驱动力分配装置3的前方,并且曲轴71的旋转轴线和传动装置8的输出旋转轴84平行于车辆前后方向。
53.除了在第一实施例中描述的相应构件以外,前后轮驱动车辆1b的驱动力分配装置3包括链条机构9,该链条机构9将发动机7的驱动力传递至高速侧旋转构件43。链条机构9包括固定到传动装置8的输出旋转轴84的第一链轮91、固定到高速侧旋转构件43的中空连接轴430的第二链轮92和金属链条93,该金属链条93是具有环状的无端带状体,该无端带状体
环绕第一链轮91和第二链轮92,使得无端带状体围绕第一链轮91和第二链轮92旋转。第二链轮92设置在高速侧旋转构件43的第一齿轮部431和第二齿轮部432之间。注意,无端带状体的示例不限于链条93,而可以是树脂带。
54.在套筒46位于第一连接位置处的第一连接状态下,电动马达2和发动机7相应的驱动力从高速侧旋转构件43的中空连接轴430通过套筒46被传递到中间输出构件45。另一方面,在套筒46位于第二连接位置处的第二连接状态下,电动马达2和发动机7的相应的驱动力从高速侧旋转构件43的中空连接轴430通过高速侧旋转构件43的第二齿轮部432、多级齿轮42的大径齿轮部421和小径齿轮部422、低速侧旋转构件44的齿轮部441和中空连接轴440以及套筒46传递到中间输出构件45。
55.图6示出电动马达2、输入齿轮31、惰轮41、高速侧旋转构件43的第一齿轮部431和链条机构9的构造。在图6中,图纸中的下侧是竖直下侧,而图纸中的上侧是竖直上侧。第一链轮91的旋转轴线o5位于马达轴24的旋转轴线o1的竖直上方。电动马达2被设置成使得马达轴24的旋转轴线o1与中间输出构件45以及第一和第二输出旋转轴51、52的输出旋转轴线o3平行并且位于输出旋转轴线o3的竖直上方。因此,如在第一实施例中那样,前后轮驱动车辆1b的最小离地间隙不太可能受到电动马达2的限制。因此,通过增加最小离地间隙,可以增强前后轮驱动车辆1b在崎岖路面上行驶的能力。
56.注意,第二链轮92可以固定到低速侧旋转构件44的中空连接轴440。在这种情况下,在第一连接状态下,发动机7的驱动力被多级齿轮42放大并且传递到高速侧旋转构件43,然后通过套筒46传递到中间输出构件45。而且,第二链轮92可以固定到多级齿轮42的连接轴420。
57.第四实施例
58.接下来,将参照图7和图8描述本发明的第四实施例。图7是示出根据本发明的第四实施例的前后轮驱动车辆1c的驱动系统的构造的示意构造图。图8是示出前后轮驱动车辆1c的驱动力分配装置3的一部分的构造的构造图。在图7和图8中,与第一实施例或第三实施例中描述的构件相同的构件被提供有与图1、图2、图5和图6中提供的那些相同的附图标记,并且省略其重复描述。
59.在第三实施例中,已经描述了如下情况:其中,在第二连接状态下,电动马达2的驱动力通过高速侧旋转构件43的第一齿轮部431和第二齿轮部432从惰轮41被传递到多级齿轮42。然而,在本实施例中,除了大径齿轮部421和小径齿轮部422之外,多级齿轮42还包括与惰轮41啮合的马达驱动力输入齿轮部423,并且马达驱动力输入齿轮部423通过连接轴420连接到大径齿轮部421和小径齿轮部422从而与大径齿轮部421和小径齿轮部422一体地旋转。因此,在高速侧旋转构件43中没有设置第一齿轮部431。
60.在图8中,图纸中的下侧对应于竖直下侧,而图纸中的上侧对应于竖直上侧。惰轮41的齿轮齿41a与马达驱动力输入齿轮部423的齿轮齿423a啮合。电动马达2被设置成使得马达轴24的旋转轴线o1与中间输出构件45以及第一和第二输出旋转轴51、52的输出旋转轴线o3平行并且位于输出旋转轴线o3的竖直上方。因此,如在第一实施例中那样,前后轮驱动车辆1c的最小离地间隙不太可能受到电动马达2的限制。因此,通过增加最小离地间隙,可以增强前后轮驱动车辆1c在崎岖路面上行驶的能力。
61.此外,如图8所示,多级齿轮42的连接轴420插入在链条93内部在第一链轮91和第
二链轮92之间。更具体地,连接轴420的一部分插入在链条93内部在第一链轮91和第二链轮92之间,连接轴420的一部分位于大径齿轮部421和小径齿轮部422与马达驱动力输入齿轮部423之间。因此,与多级齿轮42的连接轴420竖直设置在链条93的上方或下方的情况相比,驱动力分配装置3在高度方向(上下方向)上的尺寸可以减小。因此,可以容易地确保足够的最小离地间隙。
62.尽管已经基于第一至第四实施例描述了本发明,但是这些实施例并不旨在限制本发明。此外,在不脱离本发明的范围的情况下,本发明可以通过省略一些部件或者添加或替换一些部件而适当改变的任何实施例来执行。而且,此外,上述多个实施例的一些部件可以被组合并且可以被改变,例如如下所述。
63.在第一实施例至第四实施例中的每一个中,已经描述了断续离合器6设置在第一输出旋转轴51和第二输出旋转轴52之间的情况。然而,本发明不限于这种情况,例如,由电磁致动器推动的湿式多片离合器可以设置在第一输出旋转轴51和第二输出旋转轴52之间。另外,例如,可以在第一输出旋转轴51和第二输出旋转轴52之间设置诸如前差速器13或后差速器17的差速器装置,并且差速器装置的差速器壳体可以以相对于中间输出构件45不可旋转的方式连接到中间输出构件45。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1