一种纯电动矿山车控制方法与流程
1.本发明涉及矿山车,尤其是一种纯电动矿山车控制方法。
背景技术:
2.现有矿山车采用cummins电喷发动机和allison全自动电子控制变速箱,两者均带 有各自的控制单元和can总线接口,发动机和变速箱的电控系统可以通过基于 sae-j1939的统一标准共享控制参数。原车并无独立的车辆控制单元,是将自动变速 箱控制单元ecu作为一个综合性的控制单元来使用,既可以实现对自动变速箱的信号 检测和运行控制,也可对其它子系统和相关电信号进行采集与处理,从而实现对整车 信号和运行逻辑控制的综合处理。原车油耗高,高能耗,不够经济环保。
技术实现要素:
3.本发明所要解决的技术问题是提供一种纯电动矿山车控制方法,油耗低,能耗 低,经济环保。
4.为解决上述技术问题,本发明的技术方案是:一种纯电动矿山车控制方法,纯 电动矿山车控制系统包括车辆控制单元vcu、牵引控制单元dcu、辅助变流器单元 acu、电池管理系统bms、组合仪表和车载终端,车辆控制单元vcu、牵引控制单 元dcu、辅助变流器单元acu、电池管理系统bms、组合仪表和车载终端通过can 总线相互连接形成局域网,控制方法包括以下步骤:
5.(1)系统初始化:车辆控制单元vcu对di输入中的钥匙开关、方向手柄操作开 关信号进行初始化状态检测;若车辆控制单元vcu检测到相应di信号输入检测值 与初始默认值不符,则判断输入检测值无效,直接采用初始默认值作为输出状态值, 且报相应信号初始化故障报警;若相应di初始化无故障,则采用输入检测值作为输 出状态值;
6.(2)信号检测:根据通信协议将车辆控制单元vcu接收的信息进行解析;
7.(3)信号处理:包括通用信息处理、方向判断、ai解析、指示灯与报警灯处理、 故障信号处理和do信号处理;
8.(4)故障判断:故障诊断包括vcu诊断故障、dcu诊断故障、acu诊断故障、 bms诊断故障和tms故障诊断;vcu通过硬线直接获取车辆状态信息进行故障诊 断或者通过can总线接收dcu、acu、bms和tms的故障信息,经过综合判断处 理后通过组合仪表进行故障显示和报警功能;
9.(5)高压上/下电控制:当钥匙开关打到on位,vcu自检无3级故障、充电机 未连接且高压未上电成功时,进行高压上电;车辆零速后,方向手柄回中间零位,驱 动使能开关复位,钥匙开关打到acc位或闭合紧急下电开关,高压回路断开,高压 下电成功;
10.(6)辅助控制;
11.(7)牵引制动控制:包括牵引转矩计算、电制动转矩计算和牵引电机控制;
12.(8)信号输出。
13.本发明纯电动矿山车一定程度上改善安全健康业绩指标,还能降低运行成本和提 高生产率等,已成为矿山低碳化解决方案中的重要组成部分。纯电动矿山车采用基于 总线通讯协议的微机网络控制系统,通过总线技术把分布于各个车辆内部、独立完成 特定功能的控制单元互连起来形成局域网,以实现资源共享、协同工作、分散检测和 集中控制的目的;主要是取消了变速箱ecu和发动机ecm,新增了车辆控制单元 vcu、牵引控制单元dcu、辅助变流器单元acu、电池管理系统bms、组合仪表 和车载终端,其中车辆控制单元vcu作为整车的控制中枢,有效进行整车能量的分 配和管理,优化各部件的工作状态,主要实现车辆状态检测、逻辑控制以及故障诊断 和保护。
14.作为改进,所述步骤(3)中,通用信息处理包括:车辆速度计算、动力电池工 作时间、运行里程计算、续航里程计算、运行单次充放电量、整车生命信号和设置 vcu的软件版本号。
15.作为改进,所述步骤(3)中,方向判断:司机操纵位于驾驶室中控台上的方向 手柄选择车辆运行方向,方向手柄有d档、n档、r档三档位,三个档位信号通过 硬线送给vcu和dcu,方向信号由三个开关触点信号决定。
16.作为改进,所述步骤(3)中,ai解析包括:加速踏板处理、电制动手柄处理和 传感器处理。
17.作为改进,所述步骤(3)中,指示灯与报警灯处理:
18.1)转向滤清器阻塞报警灯;当转向油滤压力开关有效时,置转向滤清器阻塞报 警灯=1且故障报警,报“转向滤清器阻塞”故障1级,显示代码;
19.2)举升滤清器阻塞报警灯:当举升油滤压力开关有效时,置举升滤清器阻塞报 警灯=1且故障报警,报“举升滤清器阻塞”故障1级,显示代码;
20.3)转向低压报警灯:当转向压力开关有效或转向系统压力低2/3级故障有效时, 置转向低压报警灯=1;
21.4)低气压报警灯:当制动压力开关有效或制动系统压力低2/3级故障有效时,置 低气压报警灯=1;
22.5)动力电池余量低报警灯:当vcu采集到soc≤20%时,置动力电池余量低报 警灯=1,牵引输出执行降功模式;
23.6)行车制动指示灯:当vcu采集到电制动百分比>1%或制动压力开关有效时, 置行车制动指示灯=1;
24.7)停车制动指示灯:当vcu根据驻车制动压力开关状态判断停车制动有效时, 置停车制动指示灯=1;
25.8)制动缓解指示灯:当vcu根据各制动压力开关状态判断机械制动缓解有效且 vcu采集到电制动百分比≤1%时,置制动缓解指示灯=1;
26.9)动力电池充电指示灯:当vcu采集到bms发送的“充电状态”为1时,置 动力电池充电指示灯=1;
27.10)动力电池通断指示灯:当vcu采集到bms发送的主负接触器状态为闭合时, 置动力电池通断指示灯=1;
28.11)动力电池重大故障指示灯:当vcu采集到bms发送的当前最高故障等级为 3时,置动力电池重大故障指示灯=1;
29.12)动力电池余量低指示灯:当vcu采集到bms发送的当前soc<20%时,置 动力电池余量低指示灯=1;
30.13)制动温高:当vcu采集到制动器油温开关有效时,置制动温高=1;
31.14)前制动蓄能器压力低:当vcu采集到前制动蓄能器压力开关有效时,置前 制动蓄能器压力低=1;
32.15)后制动蓄能器压力低:当vcu采集到后制动蓄能器压力开关有效时,置后 制动蓄能器压力低=1;
33.16)转向油温高:当vcu采集到液压油温开关有效时,置转向油温高=1;
34.17)油箱液位低:当vcu采集到油箱液位开关有效时,置油箱液位低=1。
35.作为改进,所述步骤(3)中,故障信号处理包括:蓄电池电量处理及报警、温 度报警、牵引电机超速报警、制动压力开关、转向系统压力传感器、方向与速度故障 处理、can通信状态检测、电制动失效和不足。
36.作为改进,所述步骤(3)中,do信号处理包括:运行准备就绪、电池接触器 状态、水泵电机启停、制动缓解、紧急制动、停车制动、行车制动、制动灯继电器、 转向蓄能器放油阀继电器、空调继电器。
37.作为改进,所述步骤(4)中,故障等级划分规则:
38.vcu对所有故障进行等级划分,根据不同的故障等级做出相应的故障保护处理, 将故障等级分为3级:
39.3级:非常严重故障;处理方式:组合仪表显示故障代码,并点亮3级故障指示 灯,提示“立即停车”,并驱动蜂鸣器报警;vcu控制牵引卸载,禁止牵引。停车后 司机应断开高压电,立即检查故障;
40.2级:较严重故障;处理方式:组合仪表显示故障代码,并点亮2级故障指示灯, 提示“限速运行”,并驱动蜂鸣器报警;vcu限制行车速度不高于10km/h。车辆限速 运行,行驶到安全地带处理故障;
41.1级:一般故障;处理方式:组合仪表显示故障代码,并点亮1级故障指示灯, 提示“故障警告”,并驱动蜂鸣器报警;车辆可继续运行,到就近维修站处理故障。
42.作为改进,所述步骤(7)中,牵引电机控制:
43.1)牵引电机控制模式:
44.牵引电机控制模式有转速控制模式和转矩控制模式,采用转矩控制模式,将实时 目标转矩以及转速限制发送给dcu,dcu根据实时目标转矩给定电机转矩值,当转 速超过转速限制时dcu会自动减转矩;
45.2)运行方向:
46.判断有效的方向手柄作为车辆的运行方向,发送给dcu,控制牵引电机方向; 当车辆处于向后运行时,速度限制为10km/h;
47.3)牵引电机工作状态:
48.牵引电机工作状态分为牵引、制动、待机和停机状态。电机工作状态参见牵引电 机控制流程图;
49.4)坡起控制:
50.车辆具备坡起控制功能,当车辆在坡道上准备起动时,车辆施加停车制动,移动方
向 手柄,使之处于向前/向后的状态,用加速踏板提高牵引电机转速;当感觉有推动力 时,将制动缓解,车辆开始向前或向后运行;当车辆速度为零速时,不管停车制动是 否施加,都允许车辆加载,若加载超过10s停车制动未缓解,报“停车加载超时
”ꢀ
故障(3级)。当加速踏板回零后或停车制动均缓解,故障消除;当车辆速度为非零速 时,如果停车制动为施加状态,驱动蜂鸣器报警,报“停车牵引同时施加”故障(3 级);零速时,车辆非牵引或非停车,故障消除。
51.本发明与现有技术相比所带来的有益效果是:
52.本发明纯电动矿山车一定程度上改善安全健康业绩指标,还能降低运行成本和提 高生产率等,已成为矿山低碳化解决方案中的重要组成部分。纯电动矿山车采用基于 总线通讯协议的微机网络控制系统,通过总线技术把分布于各个车辆内部、独立完成 特定功能的控制单元互连起来形成局域网,以实现资源共享、协同工作、分散检测和 集中控制的目的;主要是取消了变速箱ecu和发动机ecm,新增了车辆控制单元 vcu、牵引控制单元dcu、辅助变流器单元acu、电池管理系统bms、组合仪表 和车载终端,其中车辆控制单元vcu作为整车的控制中枢,有效进行整车能量的分 配和管理,优化各部件的工作状态,主要实现车辆状态检测、逻辑控制以及故障诊断 和保护。
附图说明
53.图1为整车网络控制系统拓扑图。
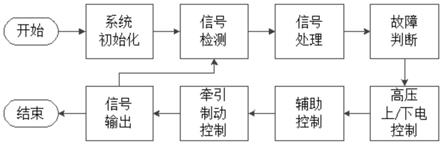
54.图2为控制逻辑主程序结构图。
55.图3为初始化状态检测流程图。
56.图4高压上/下电控制流程图。
具体实施方式
57.下面结合说明书附图对本发明作进一步说明。
58.一种纯电动矿山车控制系统,包括车辆控制单元vcu、牵引控制单元dcu、辅 助变流器单元acu、电池管理系统bms、组合仪表和车载终端,车辆控制单元vcu、 牵引控制单元dcu、辅助变流器单元acu、电池管理系统bms、组合仪表和车载 终端通过can总线相互连接形成局域网。
59.如图1所示,vcu作为整车的控制中枢实时采集驾驶员的操作指令以及整车各系 统部件的状态信息,并根据相应的控制策略进行控制决策,实现对整车及各系统部件 的监测、控制和管理功能。
60.如图2所示,vcu控制逻辑主程序包括系统初始化、信号检测、信号处理、故障 诊断、高压上/下电控制、辅助控制、牵引制动控制和信号输出。
61.1.1系统初始化
62.如图3所示,vcu对di输入中的钥匙开关、方向手柄等操作开关信号进行初始 化状态检测。若vcu检测到相应di信号输入检测值与初始默认值不符,则判断输入 检测值无效,直接采用初始默认值作为输出状态值,且报相应信号初始化故障报警; 若相应di初始化无故障,则采用输入检测值作为输出状态值。
63.1.2信号检测
64.根据通信协议将vcu接收的信息进行解析。
65.1.3信号处理
66.1.3.1通用信息处理
67.1.3.1.1车辆速度计算
68.(1)车速计算
69.采用牵引电机转速进行车速计算:
[0070][0071]
其中:
[0072]
v-车辆速度,单位:km/h;
[0073]nd-牵引电机转速(实时获取),单位:r/min;
[0074]
r-轮胎滚动半径,0.9,单位:m;
[0075]
μ
c-减速器传动比,17.83。
[0076]
(2)车辆零速
[0077]
考虑到电机速度传感器采集信号存在一定的波动性,定义当车辆速度<2km/h(电 机转速:157r/min,车轮转速:8.8r/min≈0.15r/s)时,vcu判断输出车辆零速信 号有效。零速信号主要用于以下信号或故障的判断前提或条件:
[0078]
1)方向手柄换向有效判断;
[0079]
2)方向手柄非法换向故障判断;
[0080]
3)车辆准备模式有效判断;
[0081]
4)电机检测异常或堵转故障判断;
[0082]
5)驱动使能开关输入错误故障判断;
[0083]
6)停车加载超时故障和停车牵引同时施加故障判断。
[0084]
1.3.1.2工作时间
[0085]
以每次动力电池接通高压电为起始点,动力电池断开高压电为终止点,累计计算 时长,作为工作时间。
[0086]
1.3.1.3运行里程计算
[0087]
里程包括单次行驶里程和总累计里程,主要通过程序循环一次累计里程累加为小 计里程,再累计为单次行驶里程和总累计里程。
[0088]
定义:
[0089]
v-当前车辆速度,单位:0.01km/h;
[0090]
t-程序运行周期,单位:ms;
[0091]snew-单个循环内里程,单位:0.01m;
[0092]s8-小计里程,单位:m;
[0093]ssold-上一次小计里程,单位:m;
[0094]st-单次行驶里程,单位:0.1km;
[0095]stold-上一次单次行驶里程,单位:0.1km;
[0096]sa-总累计里程,单位:0.1km;
[0097]saold-上一次总累计行驶里程,单位:0.1km;
[0098]
程序运行一次累计里程为:
[0099][0100]
小计里程:
[0101]ss
=s
sold
+s
new
/100
[0102]
当小计里程≥100m时,将小计里程累加到日行驶里程中,并将小计里程清零; 当整车重新上电工作,单次行驶里程清零:
[0103][0104][0105]
将计算的小计里程、总累计里程保存在电可擦只读存储器中,永久保存,掉电不 丢失。
[0106]
1.3.1.4续航里程计算
[0107]
车辆能量消耗率和续航里程的估算参考gb/t 18386-2017《电动汽车能量消耗 率和续航里程试验方法》的相关规定。根据动力电池标称容量和soc当前值等可估算 出车辆的续航里程为:
[0108][0109]
其中,
[0110]
e-电池标称容量,367kwh;
[0111]
c-能量消耗率,单位:kwh/km;
[0112]
soc-电池剩余电量百分比,单位:%;
[0113]sx-续航里程,单位:km;
[0114]
车辆正式运行后,针对能量消耗率c可根据每完成一次充电(soc值跳变大于30% 视为充电有效)后,进行一次自动校准,即第一次正式运行过程中采用默认的初始能 量消耗率c0,当进行下一次充电时,根据充电前车辆所耗能量和行驶里程得出的能 量消耗率,作为下一次的能量消耗率有效值,以此类推,vcu可根据充电情况自动校 准能量消耗率,提高续航里程的准确性。
[0115]
1.3.1.5运行单次充放电量
[0116]
车辆单次运行中放电量、回电量累计计算:
[0117]
pb=ib×
ub[0118]
其中:
[0119]
p
b-动力电池实时功率,单位:w;
[0120]ib-动力电池实时电流,单位:a;
[0121]ub-动力电池实时电压,单位:v;
[0122]
当实时功率>0,累加到单次运行放电量中;当实时功率<0,将该功率累加到单 次运行充电量中。
[0123]
1.3.1.6整车生命(心跳)信号
[0124]
vcu生命(心跳)信号每20ms进行一次计算:
[0125]
ln=l
n-1
+1 n∈[1,255]
[0126]
其中:
[0127]
l
n-当前生命信号值;
[0128]
l
n-1-上20ms生命信号值;
[0129]
l
0-0;
[0130]
当n=255时,溢出,从0开始计算。
[0131]
1.3.1.7软件版本号
[0132]
将bms发送的软件版本号进行处理,并设置vcu的软件版本号。
[0133]
1.3.2方向判断
[0134]
司机操纵位于驾驶室中控台上的方向手柄选择车辆运行方向。方向手柄有“d
”ꢀ
(前进位)、“n”(中间零位)、“r”(后退位)三位,三个档位信号通过硬线送给vcu 和dcu,方向信号由三个开关触点信号决定,详细见表3:
[0135]
表3方向手柄基本动作逻辑控制表
[0136][0137]
1)当vcu检测到除表3以外其他组合时,报“方向手柄故障”(3级),故障后, 当检测到表3的组合1s后故障消除;
[0138]
2)方向手柄只能在车辆零速时变换,车辆零速且手柄无故障,视为有效信号, 即零速时将手柄信号置为车辆运行方向信号,组合仪表显示车辆运行方向;
[0139]
3)车辆非零速时换方向或手柄在中间零位,报“方向手柄非法换向”故障(3 级);停车后手柄回中间零位后,故障消除;
[0140]
4)若bms主负接触器未闭合,检测到方向手柄处于非中间零位,报“方向手柄 设置非法-请检查手柄档位是否在中间零位”故障(3级),禁止变流器高压预充电。 只有当方向手柄回零,故障消除。
[0141]
1.3.3ai解析
[0142]
1.3.3.1加速踏板处理
[0143]
采用原车油门踏板作为车辆改造后的加速踏板,踏板总行程为17
°
,输出电压 范围:0.55~4.00vdc;
[0144]
死区设定:电压输出有效范围的5%((4.00-0.55)*5%=0.1725),即0.7225v (0.55+0.1725)时踏板输出从0开始增加,0.55~0.7225v踏板输出为0,防止误 操作;
[0145]
提前到达:设定加速踏板提前电压输出有效范围的5%达到输出100%,即当电压 达到3.8275v(4.00-0.1725)时,踏板输出100%;
[0146]
故障设定:当输出电压低于最低值0.3v或高于最高值0.3v时,报警,见表4:
[0147]
表4加速踏板报警信号
[0148][0149]
1.3.3.2电制动手柄处理
[0150]
电制动手柄-20
°
~20
°
线性输出1路电信号,根据输出曲线特性进行vcu电制 动控制运算,-20
°
~20
°
对应线性输出电压:0.5v~4.5vdc,线性对应电制动百分比 为0%~100%;
[0151]
死区设定:电压输出有效范围(4.5-0.5=4)的10%,即(0.5+4*10%=0.9v)时 踏板输出从0开始增加,0.5~0.9v踏板输出为0,防止误操作;
[0152]
提前到达:设定加速踏板提前电压输出有效范围的10%达到输出100%,即当电压 达到(4.5-4*10%=4.1v)时,踏板输出100%;
[0153]
故障设定:当输出电压低于最低值0.3v或高于最高值0.3v时,报警,见表5:
[0154]
表5电制动手柄报警信号
[0155][0156]
1.3.3.3传感器处理
[0157]
vcu直接采集转向系统压力传感器的电信号,该压力传感器输出电流4~20ma线 性对应制动压力0~25mpa。根据传感器检测的压力,判断出车辆转向系统压力等状 态;
[0158]
1.3.4指示灯与报警灯处理
[0159]
1)转向滤清器阻塞报警灯:当转向油滤压力开关有效时,置转向滤清器阻塞报 警灯=1且故障报警,报“转向滤清器阻塞”故障(1级),显示代码;
[0160]
2)举升滤清器阻塞报警灯:当举升油滤压力开关有效时,置举升滤清器阻塞报 警灯=1且故障报警,报“举升滤清器阻塞”故障(1级),显示代码;
[0161]
3)转向低压报警灯:当转向压力开关有效或转向系统压力低2/3级故障有效时, 置转向低压报警灯=1;
[0162]
4)低气压报警灯:当制动压力开关有效或制动系统压力低2/3级故障有效时, 置低气压报警灯=1;
[0163]
5)动力电池余量低报警灯:当vcu采集到soc≤20%时,置动力电池余量低报警 灯=1,牵引输出执行降功模式;
[0164]
6)行车制动指示灯:当vcu采集到电制动百分比>1%或制动压力开关有效时, 置行车制动指示灯=1;
[0165]
7)停车制动指示灯:当vcu根据驻车制动压力开关状态判断停车制动有效时, 置停车制动指示灯=1;
[0166]
8)制动缓解指示灯:当vcu根据各制动压力开关状态判断机械制动缓解有效且 vcu采集到电制动百分比≤1%时,置制动缓解指示灯=1;
[0167]
9)动力电池充电指示灯:当vcu采集到bms发送的“充电状态”为1时,置动 力电池充电指示灯=1;
[0168]
10)动力电池通断指示灯:当vcu采集到bms发送的主负接触器状态为闭合时, 置动力电池通断指示灯=1;
[0169]
11)动力电池重大故障指示灯:当vcu采集到bms发送的当前最高故障等级为3 时,置动力电池重大故障指示灯=1;
[0170]
12)动力电池余量低指示灯:当vcu采集到bms发送的当前soc<20%时,置动 力电池余量低指示灯=1;
[0171]
13)制动温高:当vcu采集到制动器油温开关有效时,置制动温高=1;
[0172]
14)前制动蓄能器压力低:当vcu采集到前制动蓄能器压力开关有效时,置前制 动蓄能器压力低=1;
[0173]
15)后制动蓄能器压力低:当vcu采集到后制动蓄能器压力开关有效时,置后制 动蓄能器压力低=1;
[0174]
16)转向油温高:当vcu采集到液压油温开关有效时,置转向油温高=1;
[0175]
17)油箱液位低:当vcu采集到油箱液位开关有效时,置油箱液位低=1。
[0176]
1.3.5故障信号处理
[0177]
1.3.5.1蓄电池电量处理及报警
[0178]
蓄电池电量通过vcu电源供电直接获取。当蓄电池电量满足表7时,报警;
[0179]
表7蓄电池电量报警
[0180][0181]
当蓄电池发生1、2级故障时,置蓄电池黄色故障指示灯=1;当蓄电池发生3级 故障时,置蓄电池红色故障指示灯=1。
[0182]
1.3.5.2温度报警
[0183]
牵引电机温度、变流器温度、水泵电机温度、转向泵电机温度由dcu和acu直接 采集,vcu通过can总线获取。当其温度满足表8所示条件时,报警;
[0184]
表8温度报警
[0185][0186]
1.3.5.3牵引电机超速报警
[0187]
牵引电机转速由dcu直接采集,vcu通过can总线获取。当牵引电机转速满足表 9时,报警;
[0188]
表9牵引电机超速报警
[0189][0190]
1.3.5.4制动压力开关
[0191]
制动压力满足表10时,报警;
[0192]
表10制动压力报警信号
[0193][0194]
1.3.5.5转向系统压力传感器
[0195]
转向系统压力满足表11时,报警;
[0196]
表11转向系统压力报警信号
[0197][0198]
转向压力低时,变流器控制转向电机转速提高到1500rpm;转向压力正常时,变 流器控制转向电机转速为600rpm。
[0199]
1.3.5.6方向与速度故障处理
[0200]
1)电机运行方向与给定方向不一致
[0201]
当牵引电机实际方向位=1时,认为电机运行方向为向前;当牵引电机实际方向 位=0时,认为电机运行方向为向后;否则车辆静止;
[0202]
当车辆非零速时,检测到电机运行方向与给定方向不一致,报“电机运行方向与 给定方向不一致”故障(3级);
[0203]
2)电机速度检测异常或堵转
[0204]
车辆非零速时,检测到牵引电机速度持续1s为0,报“牵引电机速度检测异常 或堵转”(3级)。
[0205]
1.3.5.7can通信状态检测
[0206]
1)当vcu检测到dcu的生命(心跳)信号持续500ms未刷新,报“dcu1通信故 障”(3级),信号刷新后故障消失;
[0207]
2)当vcu检测到acu的生命(心跳)信号持续500ms未刷新,报“dcu2通信故 障”(3级),信号刷新后故障消失;
[0208]
3)当vcu检测到bms的生命(心跳)信号持续500ms未刷新,报“bms通信故 障”(2级),信号刷新后故障消失。
[0209]
1.3.5.8电制动失效、不足
[0210]
1)电制动失效
[0211]
当vcu接收到dcu反馈的电制动失效,或者根据bms反馈的故障判断出回充限功 率0%时,报“电制动失效”故障(3级);
[0212]
2)电制动不足
[0213]
当vcu根据bms反馈的故障判断出回充限功率50%或bms反馈的soc值过高时, 报“电制动不足”故障(2级)。
[0214]
1.3.6do信号处理
[0215]
1.3.6.1运行准备就绪(ready)
[0216]
变流器主接触器已闭合且整车无3级故障时,置ready=1,否则置0。
[0217]
1.3.6.2电池接触器状态
[0218]
vcu采集bms发送的主负接触器状态信息,通过can总线和硬线将主负接触器状 态发送至dcu,作为变流器进行预充电的触发指令之一。
[0219]
1.3.6.3水泵电机启停
[0220]
vcu检测到泵水开关=1时,置水泵电机启停=1,即向acu发送水泵电机启机指令。
[0221]
vcu检测到泵水开关=0时,置水泵电机启停=0,即向acu发送水泵电机停机指令。
[0222]
1.3.6.4制动缓解
[0223]
当前/后桥制动压力开关检测压力均>4.5bar,且行车制动=0,置制动缓解=1。
[0224]
1.3.6.5紧急制动
[0225]
当vcu检测到驻车制动压力开关=1,或紧急电制动开关=1时,置紧急制动=1。
[0226]
1.3.6.6停车制动
[0227]
当vcu检测到驻车制动压力开关=1时,置停车制动=1。
[0228]
1.3.6.7行车制动
[0229]
当vcu采集到电制动百分比>1%或制动压力开关有效时,置行车制动=1。
[0230]
1.3.6.8制动灯继电器
[0231]
当紧急制动=1或停车制动=1或行车制动=1时,置制动灯继电器=1。
[0232]
1.3.6.9转向蓄能器放油阀继电器
[0233]
当vcu检测到钥匙开关断开时,置放油阀继电器=1。
[0234]
1.3.6.10空调继电器
[0235]
当vcu检测到变流器上高压完成,置空调继电器=1。
[0236]
1.4故障诊断
[0237]
故障诊断主要包括vcu诊断故障、dcu诊断故障、acu诊断故障、bms诊断故障 和tms故障诊断。vcu通过硬线直接获取车辆状态信息进行故障诊断(由系统初始化 和信号处理等过程形成)或者通过can总线接收dcu、acu、bms和tms等的故障信息, 经过综合判断处理后通过组合仪表进行故障显示和报警功能。
[0238]
1.4.1故障等级划分规则
[0239]
vcu对所有故障进行等级划分,根据不同的故障等级做出相应的故障保护处理, 将故障等级分为3级:
[0240]
3级:非常严重故障
[0241]
处理方式:组合仪表显示故障代码,并点亮3级故障指示灯,提示“立即停车”, 并驱动蜂鸣器报警;vcu控制牵引卸载,禁止牵引。停车后司机应断开高压电,立即 检查故障;
[0242]
2级:较严重故障
[0243]
处理方式:组合仪表显示故障代码,并点亮2级故障指示灯,提示“限速运行”, 并驱动蜂鸣器报警;vcu限制行车速度不高于10km/h。车辆限速运行,行驶到安全地 带处理故障;
[0244]
1级:一般故障
[0245]
处理方式:组合仪表显示故障代码,并点亮1级故障指示灯,提示“故障警告”, 并驱动蜂鸣器报警;车辆可继续运行,到就近维修站处理故障。
[0246]
1.4.2故障代码划分规则
[0247]
故障代码划分规则参考gb/t 7027-2002《信息分类和编码的基本原则与方法》 的编制原则与要求。故障代码由5位数表示,表示方法见表12:
[0248]
表12故障代码表示方法
[0249][0250]
1.5高压上/下电控制
[0251]
如图4所示,当钥匙开关打到on位,vcu自检无3级故障、充电机未连接且高 压未上电成功时,进行高压上电;车辆零速后,方向手柄回中间零位,驱动使能开关 复位,钥匙开关打到acc位或闭合紧急下电开关,高压回路断开,高压下电成功。
[0252]
1.6牵引制动控制
[0253]
1.6.1牵引转矩计算
[0254]
1.6.1.1电机牵引特性
[0255]
(1)正常模式电机牵引特性
[0256]
a)电机转速0~342r/min,恒转矩阶段,转矩为9760n.m;
[0257]
b)电机转速342~2154r/min,恒功率阶段,牵引功率为350kw;
[0258]
c)电机转速2154~3550r/min,自然特性阶段;
[0259]
(2)降功模式电机牵引特性
[0260]
a)电机转速0~263r/min,过渡阶段;
[0261]
b)电机转速263~3550r/min,恒功率阶段,牵引功率为210kw。
[0262]
1.6.1.2牵引转矩计算
[0263]
(1)根据正常模式电机牵引特性,得出过程牵引转矩:
[0264][0265]
a)动力电池最大允许输出功率≥350kw时,p
qmax
=350kw;
[0266]
b)动力电池最大允许输出功率<350kw时,
[0267]fqmax
=u
bmax
×isfmax
[0268]
(2)根据降功模式电机牵引特性,得出过程牵引转矩:
[0269][0270]
a)动力电池最大允许输出功率≥210kw时,p
qmax
=210kw;
[0271]
b)当bms限制放电功率50%时,p
qmax
=210kw;
[0272]
c)动力电池最大允许输出功率<210kw时,
[0273]fqmax
=u
bmax
×isfmax
[0274]
其中:
[0275]
t
q-过程牵引转矩,单位,n.m;
[0276]
n-牵引电机转速,单位,r/min;
[0277]
p
qmax-最大牵引功率,单位,kw;
[0278]-加速踏板行程百分比,单位,%。
[0279]ubmax-动力电池当前电压值,单位,v;
[0280]ibfmax-动力电池最大允许放电电流,单位,a。
[0281]
1.6.2电制动转矩计算
[0282]
1.6.2.1电机电制动特性
[0283]
1)电机转速0~260r/min,转矩线性下降阶段;
[0284]
2)电机转速260~925r/min,恒转矩制动阶段,制动转矩为6000n.m;
[0285]
3)电机转速925~2103r/min,恒功率阶段,电制动功率为581kw;
[0286]
4)电机转速2103~3550r/min,自然特性阶段。
[0287]
1.6.2.2电制动转矩计算
[0288]
根据牵引电机电制动特性,得出过程电制动转矩:
[0289][0290]
其中:
[0291]
t
z-过程电制动转矩,单位,n.m;
[0292]
n-牵引电机转速,单位,r/min;
[0293]
p
zmax-最大电制动功率,单位,kw;
[0294]-电制动手柄行程百分比,单位,%。
[0295]
1)当紧急制动有效时,置
[0296]
2)动力电池最大允许回馈功率≥581kw时,p
amax
=581kw;
[0297]
3)动力电池最大允许回馈功率<581kw时;
[0298]
p
zmax
=u
bmax
×ibemax
[0299]
4)当bms限制回充功率50%时,p
zmax
=290kw;
[0300]
其中:
[0301]ubmax-动力电池当前电压值,单位,v;
[0302]ibemax-动力电池最大允许充电电流,单位,a。
[0303]
1.6.3牵引电机控制
[0304]
1)牵引电机控制模式
[0305]
牵引电机控制模式有转速控制模式和转矩控制模式。采用转矩控制模式,将实时 目标转矩以及转速限制发送给dcu。dcu根据实时目标转矩给定电机转矩值,当转速 超过转速限制时dcu会自动减转矩;
[0306]
2)运行方向
[0307]
判断有效的方向手柄作为车辆的运行方向,发送给dcu,控制牵引电机方向;当 车辆处于向后运行时,速度限制为10km/h;
[0308]
3)牵引电机工作状态
[0309]
牵引电机工作状态分为牵引、制动、待机和停机状态。电机工作状态参见牵引电 机控制流程图;
[0310]
4)坡起控制
[0311]
车辆具备坡起控制功能,当车辆在坡道上准备起动时,车辆施加停车制动,移动 方向手柄,使之处于向前/向后的状态,用加速踏板提高牵引电机转速。当感觉有推 动力时,将制动缓解,车辆开始向前或向后运行。当车辆速度为零速时,不管停车制 动是否施加,都允许车辆加载,若加载超过10s停车制动未缓解,报“停车加载超时
”ꢀ
故障(3级)。当加速踏板回零后或停车制动均缓解,故障消除。
[0312]
当车辆速度为非零速时,如果停车制动为施加状态,驱动蜂鸣器报警,报“停车 牵引同时施加”故障(3级);零速时,车辆非牵引或非停车,故障消除。
[0313]
1)当出现3级故障时:牵引状态:目标转矩=0;制动状态:目标转矩=电机转 矩;
[0314]
2)当出现2级故障时,激活2级故障限速标志=1:牵引状态:车辆限速10km/h; 制动状态:目标转矩=电机转矩;
[0315]
3)当无故障或出现1级故障时:牵引状态:目标转矩=电机转矩;制动状态: 目标转矩=电机转矩;
[0316]
4)当bms限功率0%时:牵引状态:目标转矩=0;制动状态:目标转矩=0。
[0317]
根据以上原则得出目标转矩后,给目标转矩设置升步长和降步长,使转矩给定平 缓无冲击。设置转矩升步长为140n.m(上升70次);设置降步长为100n.m(降98 次)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1