一种融合再生制动与辅助制动的复合制动系统及方法
1.本发明属于汽车制动系统技术领域,具体指代一种融合再生制动与辅助制动的复合制动系统及方法。
背景技术:
2.随着全球能源材料价格大幅度上涨,人们对电动汽车高效率、低成本行驶越来越重视,而再生制动能量回收技术对汽车的能源高效率利用至关重要;现有再生制动能量回收技术通常采用电机反转来回收汽车制动时的能量,进而提高汽车续航里程。
3.现有再生制动能量回收技术中,中国发明专利申请号为cn201810682263.3中公开了一种电动汽车的再生制动方法及系统,接收到再生制动指令,启动再生制动模式;获取再生制动能量回收比例;根据所述再生制动能量回收比例以及预设电机最大再生制动转矩确定实际电机最大再生制动转矩;获取需求再生制动转矩;以及根据所获取的需求再生制动转矩以及所述实际电机最大再生制动转矩,控制所述电动汽车的电机执行电制动,该技术解决了现有技术中再生制动过程中驾驶者无法单独控制再生能量回收的问题;但是,上述技术中汽车制动能量采用电机转换回收,在车辆紧急制动时,为紧急获得足够的制动力矩而关闭再生制动系统,这导致大量的制动能量无法回收。
4.现有再生制动控制策略中,在保证整车制动效能的前提下,使能量回收达到最大。例如:现有的并联策略完全保留传统的摩擦制动系统,再生制动力只是一种施加在前轴的附加制动力,并且前轴的再生制动力与摩擦制动力之间按固定的比例分配,该分配比例是车速或减速的函数;但是,上述技术再生制动能量利用效率低下,对于无法回收的制动能量没有进一步的利用,而只是通过摩擦生热而散掉。
技术实现要素:
5.针对于上述现有技术的不足,本发明的目的在于提供一种融合再生制动与辅助制动的复合制动系统及方法,以解决现有技术中难以实现制动能量高效利用以及制动时响应速度过慢的问题。
6.为达到上述目的,本发明采用的技术方案如下:
7.本发明的一种融合再生制动与辅助制动的复合制动系统,包括:制动踏板总成、电子液压制动系统总成、再生制动系统总成、柱塞泵离合装置、柱塞泵高压油路总成及主控制器;
8.所述制动踏板总成连接主控制器,其包括:制动踏板和制动踏板位移传感器;
9.所述制动踏板位移传感器安转于制动踏板上,用于测量制动踏板的位移数据,并将数据发送给主控制器;当制动踏板传感器测得的数据为零,表示制动踏板已释放;当制动踏板传感器测得的数据大于零,表示制动踏板已踩下;
10.所述电子液压制动系统总成包括:储油箱、电机泵、第一单向止回阀、第三单向止回阀、蓄能器、蓄能器压力传感器、溢流阀、增压阀、减压阀、轮缸、轮缸压力传感器、轮毂、第
一三通阀、第二三通阀、第三三通阀、第四三通阀、第五三通阀;储油箱通过油管与第一三通阀的进油口相连,第一三通阀的第一出油口通过油管与电机泵相连,第一三通阀的第二出油口关闭;第一三通阀电与机泵之间的油管上安装有第一单向止回阀,使液压油从第一三通阀流向电机泵;所述电机泵与第二三通阀的第一进油口通过油管相连,第二三通阀的第二进油口关闭,电机泵与第二三通阀之间安装有第三单向止回阀,使液压油从电机泵流向第二三通阀,所述第二三通阀的出油口与蓄能器通过油管相连,所述蓄能器与第三三通阀的进油口通过油管相连,所述第三三通阀与蓄能器之间的油管中安装有蓄能器压力传感器,第三三通阀的第一出油口与溢流阀通过油管相连,溢流阀通过油管与第五三通阀的第一进油口相连,第三三通阀的第二出油口与增压阀通过油管相连,增压阀通过油管与第四三通阀的进油口相连,第四三通阀的第一出油口通过油管与减压阀相连,第四三通阀的第二出油口通过油管与轮缸相连,第四三通阀与轮缸之间的油管中安装有轮缸压力传感器,所述轮缸通过制动器于轮毂相连,所述减压阀与第五三通阀的第二进油口通过油管相连,第五三通阀的出油口通过油管与储油箱相连;
11.所述再生制动系统总成包括:驱动电机及电机控制器;所述驱动电机有三种工作状态:第一工作状态为驱动行驶状态,第二工作状态为再生制动状态,第三工作状态为停机状态;所述三种工作状态由电机控制器控制,所述电机控制器通过连接线分别与驱动电机、主控制器连接;
12.所述柱塞泵离合装置包括:驱动电机转子主动齿轮、齿圈、行星轮、行星架、行星架制动器;所述驱动电机转子主动齿轮通过花键安装在所述驱动电机的转子上;所述行星轮空套于行星架上并与驱动电机转子主动齿轮相啮合;所述齿圈与行星轮相啮合并包裹行星轮;所述行星架空套在驱动电机的转子上,由与之电性连接的行星架制动器控制;
13.所述柱塞泵高压油路总成包括:柱塞泵、第二单向止回阀、第四单向止回阀;所述柱塞泵的低压入口与第一三通阀的第二出油口通过油管相连,柱塞泵高压出口与第二三通阀的第二进油口通过油管相连;所述第二单向止回阀设于第一三通阀与柱塞泵之间,用于将液压油从第一三通阀流向柱塞泵;所述第四单向止回阀设于柱塞泵与第二三通阀之间,用于将液压油从柱塞泵流向第二三通阀;所述柱塞泵的转子与柱塞泵离合装置的齿圈相连接;
14.所述主控制器通过连接线与所述溢流阀、增压阀、减压阀、电机泵、蓄能器压力传感器、轮缸压力传感器、电机控制器、行星架制动器和制动踏板位移传感器相连;主控制器接收电机控制器、蓄能器压力传感器、轮缸压力传感器和制动踏板位移传感器的信号,控制溢流阀、增压阀、减压阀的开闭状态和电机泵的转速以及行星架制动器的工作状态。
15.进一步地,所述驱动电机上,无驱动电机转子主动齿轮一侧的驱动电机转子上装有主减速器主动齿轮,所述主减速器主动齿轮与差速器连接,并带动差速器旋转,所述差速器与半轴连接,并带动半轴旋转,半轴与轮毂固连,并与轮毂同步转动。
16.进一步地,所述制动器包括:卡钳和制动盘;卡钳与所述轮缸相连接,卡钳分布在制动盘两侧并留有0.2mm间隙,所述制动盘与轮毂固连并跟随轮毂一起转动。
17.进一步地,所述第一三通阀为一进两出的阀件。
18.进一步地,所述第二三通阀为两进一出的阀件。
19.进一步地,所述第三三通阀为一进两出的阀件。
20.进一步地,所述第五三通阀为两进一出的阀件。
21.进一步地,所述第四三通阀为一进两出的阀件。
22.进一步地,所述复合制动系统有三种制动方式:液压制动方式、再生制动方式及复合制动方式;
23.所述液压制动方式为车辆仅通过复合制动系统的电子液压制动系统总成对车辆进行制动,实现控制车速;
24.所述再生制动方式为车辆仅通过驱动电机产生制动力矩对车辆进行制动,实现控制车速,由于车辆为前轮驱动,再生制动时仅前轮存在制动力矩;
25.所述复合制动方式为车辆通过复合制动系统的电子液压制动系统总成和再生制动系统总成配合工作对车辆进行制动,实现控制车速。
26.进一步地,所述复合制动系统的制动方式的选择取决于车辆所需的制动强度;所述制动强度即为车辆减速度大小与重力加速度的比值,主控制器通过采集制动踏板位移传感器数据,计算出当前车辆的所需制动强度。
27.进一步地,车轮滚动有三种状态:纯滚动状态、边滚边滑状态和纯滑动状态。当车轮由边滚边滑状态过渡到纯滑动状态时称车轮即将抱死。
28.进一步地,定义制动强度z
min
,其为仅采取再生制动方式且前轮不抱死时所能达到的最大制动强度;当所需制动强度小于z
min
时,车辆制动只采用再生制动;
29.进一步地,定义制动强度z
max
,其为使车辆处于紧急制动状态下的最小制动强度;当所需制动强度大于z
max
时,车辆为紧急制动状态,为保证制动效能,车辆制动只采用液压制动;当所需制动强度处于z
min
到z
max
之间,车辆制动采取复合制动。
30.进一步地,所述蓄能器压力传感器用于监测蓄能器中的压力,所述压力存在上限和下限,上限受溢流阀控制,下限受柱塞泵和电机泵控制。
31.进一步地,所述轮缸包括前轮轮缸和后轮轮缸;所述轮缸压力传感器包括前轮轮缸压力传感器和后轮轮缸压力传感器。
32.进一步地,所述轮缸压力传感器用于监测轮缸中的压力,所述压力受增压阀与减压阀控制;通过控制轮缸中的压力来控制制动力的大小,以调节车轮滑移率使车轮的附着系数最大。
33.进一步地,所述柱塞泵离合装置通过行星架制动器控制行星架的输入,从而改变动力的传输,当行星架制动器制动时,行星架输入转速为零,通过驱动电机转子主动齿轮向行星轮传递动力,行星轮再将动力传给齿圈,齿圈将动力完全传给柱塞泵,柱塞泵将储油箱中的油泵入高压油管中,行星架制动器释放时,柱塞泵停止工作。
34.本发明的一种融合再生制动与辅助制动的复合制动方法,基于上述系统,包括以下步骤:
35.1)主控制器接收制动踏板位移传感器采集的信息,并根据接收到的信息控制柱塞泵离合装置的工作状态与车辆制动方式的选取;
36.2)当制动踏板踩下且有摩擦制动需求时,主控制器接收蓄能器压力传感器采集的压力信息,当压力值超过上阈值,主控制器控制溢流阀打开,电机泵不工作,使部分高压油不流经轮缸直接回到储油箱中,所述上阈值为蓄能器所能承受的极限压力;当压力值小于下阈值,主控制器控制溢流阀关闭,电机泵工作,给蓄能器加压,下阈值为蓄能器内部的最
低要求压力;当压力值处于上阈值与下阈值之间,主控制器控制溢流阀关闭,电机泵不工作;
37.3)当制动踏板踩下且有摩擦制动需求时,主控制器根据制动踏板位移计算所需理论轮缸压力,主控制器接收轮缸压力传感器采集的压力信息并进行判断,当轮缸中的压力小于理论轮缸压力时,主控制器控制增压阀打开,减压阀关闭,补充轮缸中的压力;当轮缸中的压力等于理论轮缸压力时,主控制器控制增压阀关闭,减压阀关闭,此时,轮缸中的压力为理想压力;当轮缸中的压力大于理论轮缸压力时,主控制器控制增压阀关闭,减压阀打开,释放轮缸中的压力,从而控制轮缸中的压力跟踪计算得到的理论轮缸压力。
38.进一步地,所述步骤1)中的主控制器控制柱塞泵离合装置的工作状态与车辆制动方式的选取具体包括以下步骤:
39.11)主控制器接收制动踏板位移传感器采集的数据,当制动踏板已踩下,主控制器计算当前车辆的所需制动强度z;
40.12)当z小于z
min
且制动踏板已踩下,主控制器控制电机控制器进而控制驱动电机处于再生制动工作状态,车辆制动方式为再生制动方式,主控制器控制柱塞泵离合装置处于分离状态,即行星架制动器释放,z
min
为仅采取再生制动方式且前轮不抱死时所能达到的最大制动强度;
41.13)当z小于z
max
并大于z
min
且制动踏板已踩下,主控制器控制电机控制器进而控制驱动电机以z
min
的制动强度进行再生制动,前后轮的摩擦制动提供z-z
min
的制动强度,主控制器控制柱塞泵离合装置处于结合状态,即行星架制动器制动,此时柱塞泵与电机泵联合工作,z
max
为使车辆处于紧急制动状态下的最小制动强度;
42.14)当z大于z
max
且制动踏板已踩下,主控制器控制电机控制器进而控制驱动电机处于停机状态,前后轮以一定比例分配制动力矩进行制动来提供z的制动强度,主控制器控制柱塞泵离合装置处于结合状态,即行星架制动器制动,此时柱塞泵与电机泵联合工作;
43.15)当制动踏板未踩下,车辆不采取制动动作。
44.进一步地,所述步骤13)前后轮的摩擦制动提供z-z
min
的制动强度具体包括以下步骤:
45.131)当z-z
min
小于zr时,仅由后轮的摩擦制动提供z-z
min
的制动强度,zr为后轮即将抱死时,后轮提供的制动强度;
46.132)当z-z
min
大于等于zr时,由后轮的摩擦制动提供zr的制动强度,由前轮的摩擦制动提供z-z
min-zr的制动强度。
47.进一步地,所述步骤14)行星架制动器工作过程具体包括以下步骤:
48.141)主控制器发送制动指令给行星架制动器,行星架制动器制动,行星架输入转速为零,行星轮公转被限制;
49.142)驱动电机转子主动齿轮带动行星轮旋转,并将力矩完全传递给行星轮;
50.143)行星轮自转带动齿圈旋转,并将力矩完全传递给齿圈;
51.144)齿圈通过带动柱塞泵的转子旋转从而带动柱塞泵工作,柱塞泵将储油箱中的油泵入高压油管中,保证蓄能器中建立一定的压力;
52.145)主控制器控制柱塞泵离合装置的行星架制动器释放,行星轮没有输入,驱动电机转子主动齿轮的力矩传不到齿圈上,柱塞泵停止工作。
53.本发明的有益效果:
54.本发明结合具有辅助制动功能的电子液压制动与再生制动,在保证制动效能的前提下具有再生制动能量回收的功能,可以增加车辆的续驶里程,起到节能减排的效果。
55.本发明融合柱塞泵高压油路,电子液压制动装置和再生制动装置,提出了一种新的再生制动控制策略,使得再生制动装置无法回收的制动能量进一步得到利用,进行辅助制动,减少了车辆能源的消耗,进一步提升了车辆的续驶里程。
附图说明
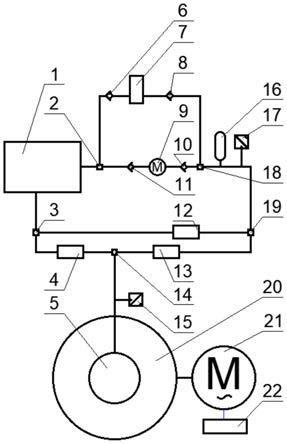
56.图1为本发明系统的结构原理图;
57.图2为本发明柱塞泵离合装置原理简图;
58.图3为具体实施方式中柱塞泵的结构示意图;
59.图4为图3的剖视图;
60.图5为本发明再生制动控制策略流程图;
61.图6为本发明再生制动控制策略中的复合制动策略流程图;
62.图1中:1-储油箱,2-第一三通阀,3-第五三通阀,4-减压阀,5-轮缸,6-第二单向止回阀,7-柱塞泵,8-第四单向止回阀,9-电机泵,10-第三单向止回阀,11-第一单向止回阀,12-溢流阀,13-增压阀,14-第四三通阀,15-轮缸压力传感器,16-蓄能器,17-蓄能器压力传感器,18-第二三通阀,19-第三三通阀,20-轮毂,21-驱动电机,22-电机控制器;
63.图2中:21-驱动电机,23-行星架制动器,24-行星架,25-行星轮,26-齿圈,27-驱动电机转子主动齿轮;
64.图3中:28-回位弹簧,29-斜盘导向盖,30-斜盘导向盖电磁阀,31-斜盘,32-柱塞,33-柱塞缸体,34-配油盘,35-柱塞泵转子。
具体实施方式
65.为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
66.参照图1、图2所示,本发明的一种融合再生制动与辅助制动的复合制动系统,包括:制动踏板总成、电子液压制动系统总成、再生制动系统总成、柱塞泵离合装置、柱塞泵高压油路总成及主控制器;其中,
67.所述制动踏板总成连接主控制器,其包括:制动踏板和制动踏板位移传感器;
68.所述制动踏板位移传感器安转于制动踏板上,用于测量制动踏板的位移数据,并将数据发送给主控制器;当制动踏板传感器测得的数据为零,表示制动踏板已释放;当制动踏板传感器测得的数据大于零,表示制动踏板已踩下;
69.所述电子液压制动系统总成包括:储油箱1、电机泵9、第一单向止回阀11、第三单向止回阀10、蓄能器16、蓄能器压力传感器17、溢流阀12、增压阀13、减压阀4、轮缸5、轮缸压力传感器15、轮毂20、第一三通阀2、第二三通阀18、第三三通阀19、第四三通阀14及第五三通阀3;储油箱1通过油管与第一三通阀2的进油口相连,第一三通阀2的第一出油口通过油管与电机泵9相连,第一三通阀2的第二出油口关闭;第一三通阀2电与机泵9之间的油管上安装有第一单向止回阀11,使液压油从第一三通阀2流向电机泵9;所述电机泵9与第二三通
阀18的第一进油口通过油管相连,第二三通阀18的第二进油口关闭,电机泵9与第二三通阀18之间安装有第三单向止回阀10,使液压油从电机泵9流向第二三通阀18,所述第二三通阀18的出油口与蓄能器16通过油管相连,所述蓄能器16与第三三通阀19的进油口通过油管相连,所述第三三通阀19与蓄能器16之间的油管中安装有蓄能器压力传感器17,第三三通阀19的第一出油口与溢流阀12通过油管相连,溢流阀12通过油管与第五三通阀3的第一进油口相连,第三三通阀19的第二出油口与增压阀13通过油管相连,增压阀13通过油管与第四三通阀14的进油口相连,第四三通阀14的第一出油口通过油管与减压阀4相连,第四三通阀14的第二出油口通过油管与轮缸5相连,第四三通阀14与轮缸5之间的油管中安装有轮缸压力传感器15,所述轮缸5通过制动器于轮毂20相连,所述减压阀4与第五三通阀3的第二进油口通过油管相连,第五三通阀3的出油口通过油管与储油箱1相连;
70.所述制动器包括:卡钳和制动盘;卡钳与所述轮缸相连接,卡钳分布在制动盘两侧并留有0.2mm间隙,所述制动盘与轮毂固连并跟随轮毂一起转动;
71.所述再生制动系统总成包括:驱动电机21及电机控制器22;所述驱动电机21有三种工作状态:第一工作状态为驱动行驶状态,第二工作状态为再生制动状态,第三工作状态为停机状态;所述三种工作状态由电机控制器22控制,所述电机控制器22通过连接线与驱动电机21连接,通过连接线与主控制器连接;所述驱动电机上,无驱动电机转子主动齿轮一侧的驱动电机转子上装有主减速器主动齿轮,所述主减速器主动齿轮与差速器连接,并带动差速器旋转,所述差速器与半轴连接,并带动半轴旋转,半轴与轮毂固连,并与轮毂同步转动。
72.参照图3、图4所示,所述柱塞泵离合装置包括:驱动电机转子主动齿轮27、齿圈26、行星轮25、行星架24、行星架制动器23;所述驱动电机转子主动齿轮27通过花键安装在驱动电机21的转子上,所述驱动电机转子为驱动电机21中心的旋转部件;所述行星轮25空套在行星架24上并与驱动电机转子主动齿轮27相啮合;所述齿圈26与行星轮25相啮合并包裹行星轮25;所述行星架24空套在驱动电机21的转子上,由与之电性连接的行星架制动器23控制;
73.所述柱塞泵高压油路总成包括:柱塞泵7、第二单向止回阀6、第四单向止回阀8;所述柱塞泵7的低压入口与第一三通阀2的第二出油口通过油管相连,柱塞泵7高压出口与第二三通阀18的第二进油口通过油管相连;所述第二单向止回阀6设于第一三通阀2与柱塞泵7之间,用于将液压油从第一三通阀2流向柱塞泵7;所述第四单向止回阀8设于柱塞泵7与第二三通阀18之间,用于将液压油从柱塞泵7流向第二三通阀18;所述柱塞泵7的转子与柱塞泵离合装置的齿圈26相连接,并一起转动;
74.所述主控制器通过连接线与所述溢流阀12、增压阀13、减压阀4、电机泵9、蓄能器压力传感器17、轮缸压力传感器15、电机控制器22、行星架制动器21和制动踏板位移传感器相连;主控制器接收电机控制器22、蓄能器压力传感器17、轮缸压力传感器15和制动踏板位移传感器的信号,控制溢流阀12、增压阀13、减压阀3的开闭状态和电机泵9的转速以及行星架制动器23的工作状态。
75.示例中,所述第一三通阀2为一进两出的阀件。
76.示例中,所述第二三通阀18为两进一出的阀件。
77.示例中,所述第三三通阀19为一进两出的阀件。
78.示例中,所述第四三通阀14为一进两出的阀件。
79.示例中,所述第五三通阀3为两进一出的阀件。
80.具体地,复合制动系统有三种制动方式:液压制动方式、再生制动方式及复合制动方式;
81.所述液压制动方式为车辆仅通过复合制动系统的电子液压制动系统总成对车辆进行制动,实现控制车速;
82.所述再生制动方式为车辆仅通过驱动电机产生制动力矩对车辆进行制动,实现控制车速,由于车辆为前轮驱动,再生制动时仅前轮存在制动力矩;
83.所述复合制动方式为车辆通过复合制动系统的电子液压制动系统总成和再生制动系统总成配合工作对车辆进行制动,实现控制车速。
84.其中,复合制动系统制动方式的选择取决于车辆所需的制动强度;所述制动强度即为车辆减速度大小与重力加速度的比值,主控制器通过采集制动踏板位移传感器数据,计算出当前车辆的所需制动强度。
85.具体地,车轮滚动有三种状态:纯滚动状态、边滚边滑状态和纯滑动状态。当车轮由边滚边滑状态过渡到纯滑动状态时称车轮即将抱死。
86.其中,定义制动强度z
min
,其为仅采取再生制动方式且前轮不抱死时所能达到的最大制动强度;当所需制动强度小于z
min
时,车辆制动只采用再生制动;
87.其中,定义制动强度z
max
,其为使车辆处于紧急制动状态下的最小制动强度;当所需制动强度大于z
max
时,车辆为紧急制动状态,为保证制动效能,车辆制动只采用液压制动;当所需制动强度处于z
min
到z
max
之间,车辆制动采取复合制动。
88.其中,所述蓄能器压力传感器17用于监测蓄能器16中的压力,所述压力存在上限和下限,上限受溢流阀12控制,下限受柱塞泵7和电机泵9控制。
89.其中,所述轮缸5包括前轮轮缸和后轮轮缸;所述轮缸压力传感器15包括前轮轮缸压力传感器和后轮轮缸压力传感器。
90.其中,所述轮缸压力传感器15用于监测轮缸5中的压力,所述压力受增压阀13与减压阀4控制;通过控制轮缸5中的压力来控制制动力的大小,以调节车轮滑移率使车轮的附着系数最大。
91.其中,所述柱塞泵离合装置通过行星架制动器23控制行星架24的输入,从而改变动力的传输,当行星架制动器23制动时,行星架24输入转速为零,通过驱动电机转子主动齿轮27向行星轮25传递动力,行星轮25再将动力传给齿圈26,齿圈26将动力完全传给柱塞泵7,柱塞泵7将储油箱1中的油泵入高压油管中,行星架制动器23释放时,柱塞泵7停止工作。
92.其中,所述柱塞泵7为斜盘式轴向柱塞泵,包括:回位弹簧28、斜盘导向盖29、斜盘导向盖电磁阀30、斜盘31、柱塞32、柱塞缸体33、配油盘34及柱塞泵转子35;所述回位弹簧28位于斜盘导向盖29的无斜盘的一侧,并与斜盘导向盖29相连,斜盘导向盖电磁阀30在有斜盘的一侧与斜盘导向盖29相连,斜盘导向盖29空套在柱塞泵转子35上,斜盘31紧贴斜盘导向盖29并空套在柱塞泵转子35上,斜盘31通过圆周均匀分布的六个柱塞32分别与柱塞缸体33相连,柱塞缸体33通过花键与柱塞泵转子35相连并同步转动,紧贴柱塞缸体33的配油盘34空套在柱塞泵转子35上。
93.示例中,所述步骤144)中柱塞泵工作时的建压过程如下:
94.1441)所述柱塞泵为斜盘式轴向柱塞泵,斜盘式轴向柱塞泵的柱塞32的个数为a,柱塞32的直径为d,斜盘31的平面与柱塞泵转子35轴线的法平面的夹角为α,柱塞32轴线绕柱塞泵转子35的轴线的旋转直径为d;
95.1442)斜盘式轴向柱塞泵开始工作时刻t为0,对应此时蓄能器16压力为p0,蓄能器16内气体体积为v0,气体密度为ρ0,蓄能器16压力高于下阈值,低于上阈值,根据斜盘式轴向柱塞泵的工作特性,得到以下压力公式:
[0096][0097]
式中,n为车轮转速,i0为主减速器传动比,i1为柱塞泵离合装置传动比,t为斜盘式柱塞泵的工作时间,m0为蓄能器内气体的质量。
[0098]
蓄能器16压力高于下阈值,低于上阈值,蓄能器16压力受斜盘31轴线法平面与柱塞泵转子35轴线法平面的夹角的影响、车轮转速影响和柱塞泵7工作时间影响。
[0099]
此外,在电子液压制动系统总成和柱塞泵高压油路总成中,油路可根据是否与储油箱1直接相连被分为两部分,一部分是与储油箱1直接连通的称为低压油路,低压油路中的液压油称为低压油,其余的油路统称为高压油路,高压油路中的液压油统称为高压油。
[0100]
本发明的一种融合再生制动与辅助制动的复合制动方法,基于上述系统,包括以下步骤:
[0101]
1)主控制器接收制动踏板位移传感器采集的信息,并根据接收到的信息控制柱塞泵离合装置的工作状态与车辆制动方式的选取;
[0102]
2)当制动踏板踩下且有摩擦制动需求时,主控制器接收蓄能器压力传感器采集的压力信息,当压力值超过上阈值,主控制器控制溢流阀打开,电机泵不工作,使部分高压油不流经轮缸直接回到储油箱中,所述上阈值为蓄能器所能承受的极限压力;当压力值小于下阈值,主控制器控制溢流阀关闭,电机泵工作,给蓄能器加压,下阈值为蓄能器内部的最低要求压力;当压力值处于上阈值与下阈值之间,主控制器控制溢流阀关闭,电机泵不工作;
[0103]
3)当制动踏板踩下且有摩擦制动需求时,主控制器根据制动踏板位移计算所需理论轮缸压力,主控制器接收轮缸压力传感器采集的压力信息并进行判断,当轮缸中的压力小于理论轮缸压力时,主控制器控制增压阀打开,减压阀关闭,补充轮缸中的压力;当轮缸中的压力等于理论轮缸压力时,主控制器控制增压阀关闭,减压阀关闭,此时,轮缸中的压力为理想压力;当轮缸中的压力大于理论轮缸压力时,主控制器控制增压阀关闭,减压阀打开,释放轮缸中的压力,从而控制轮缸中的压力跟踪计算得到的理论轮缸压力。
[0104]
具体地,所述步骤1)中的主控制器控制柱塞泵离合装置的工作状态与车辆制动方式的选取具体包括以下步骤:
[0105]
11)主控制器接收制动踏板位移传感器采集的数据,当制动踏板已踩下,主控制器计算当前车辆的所需制动强度z;
[0106]
12)当z小于z
min
且制动踏板已踩下,主控制器控制电机控制器进而控制驱动电机处于再生制动工作状态,车辆制动方式为再生制动方式,主控制器控制柱塞泵离合装置处于分离状态,即行星架制动器释放,z
min
为仅采取再生制动方式且前轮不抱死时所能达到的
最大制动强度;
[0107]
13)当z小于z
max
并大于z
min
且制动踏板已踩下,主控制器控制电机控制器进而控制驱动电机以z
min
的制动强度进行再生制动,前后轮的摩擦制动提供z-z
min
的制动强度,主控制器控制柱塞泵离合装置处于结合状态,即行星架制动器制动,此时柱塞泵与电机泵联合工作,z
max
为使车辆处于紧急制动状态下的最小制动强度;
[0108]
14)当z大于z
max
且制动踏板已踩下,主控制器控制电机控制器进而控制驱动电机处于停机状态,前后轮以一定比例分配制动力矩进行制动来提供z的制动强度,主控制器控制柱塞泵离合装置处于结合状态,即行星架制动器制动,此时柱塞泵与电机泵联合工作;
[0109]
15)当制动踏板未踩下,车辆不采取制动动作。
[0110]
其中,所述步骤13)前后轮的摩擦制动提供z-z
min
的制动强度具体包括以下步骤:
[0111]
131)当z-z
min
小于zr时,仅由后轮的摩擦制动提供z-z
min
的制动强度,zr为后轮即将抱死时,后轮提供的制动强度;
[0112]
132)当z-z
min
大于等于zr时,由后轮的摩擦制动提供zr的制动强度,由前轮的摩擦制动提供z-z
min-zr的制动强度。
[0113]
其中,所述步骤14)行星架制动器工作过程具体包括以下步骤:
[0114]
141)主控制器发送制动指令给行星架制动器,行星架制动器制动,行星架输入转速为零,行星轮公转被限制;
[0115]
142)驱动电机转子主动齿轮带动行星轮旋转,并将力矩完全传递给行星轮;
[0116]
143)行星轮自转带动齿圈旋转,并将力矩完全传递给齿圈;
[0117]
144)齿圈通过带动柱塞泵的转子旋转从而带动柱塞泵工作,柱塞泵将储油箱中的油泵入高压油管中,保证蓄能器中建立一定的压力;
[0118]
145)主控制器控制柱塞泵离合装置的行星架制动器释放,行星轮没有输入,驱动电机转子主动齿轮的力矩传不到齿圈上,柱塞泵停止工作。
[0119]
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1