一种双农机收运同步系统及方法
1.本发明涉及一种收运同步系统及方法,特别涉及一种双农机收运同步系统及方法。
背景技术:
2.目前,农机被广泛地应用于农业生产中,传统农机需要两个或多个操纵者实现收运过程,且对配合有较高的要求。如果配合不当,会造成收运过程的效率低下,严重会发生事故,造成生命与财产的损失。
3.收运过程的同步问题实质为跟随问题,现有的跟随算法主要应用于汽车产业,且多为控制纵向安全距离和加速度模型,无法解决农机收运同步的问题。传统方式无法对运输车满后的行为进行控制,浪费了资源,不能满足实际收运过程的需求。
4.为解决上述问题,减少劳动力的投入,提高粮食收割和运输的效率,避免事故的发生,本发明提出了一种双农机收运同步系统及方法,旨在将农忙时的收割和运输过程同步进行。
技术实现要素:
5.本发明的目的是通过车载传感器获取两个农机的速度、加速度等行驶信息,并依据所获得的信息通过bp神经网络pid控制模型实现两农机的同步行驶,从而减少劳动力投入,提高收运过程的效率而提供的一种双农机收运同步系统及方法。
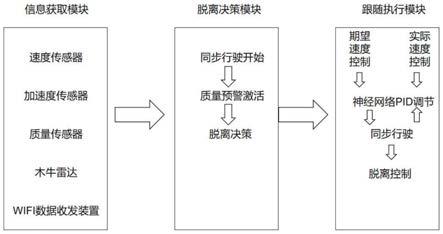
6.本发明提供的双农机收运同步系统包括有信息获取模块、脱离决策模块和跟随执行模块,其中信息获取模块输出端和脱离决策模块输入端相连,信息获取模块输出端同时与跟随执行模块输入端相连,脱离决策模块输出端和跟随执行模块相连,信息获取模块内设置的传感器和木牛雷达通过总线与农机直接相连,信息获取模块内设置的wifi数据收发装置通过无线信号与农机相连,wifi数据收发装置通过农机总线及无线信号将信息获取模块获取的信息发送至脱离决策模块及跟随执行模块,跟随执行模块根据决策结果控制农机的制动踏板、油门踏板相关执行机构的工作从而进行农机的同步收运。
7.信息获取模块包括有速度传感器、加速度传感器、质量传感器、木牛雷达和wifi数据收发装置,其中速度传感器采用森尼克速度传感器,速度传感器装配在收割机左侧车轮处,速度传感器能够实时获取收割机的速度信息,加速度传感器采用压阻式加速度传感器,加速度传感器装配在收割机车轮的右侧,加速度传感器能够实时获取收割机的加速度,木牛雷达装配在运输车的左侧车厢处,木牛雷达能够实时获取收割机和运输车的相对位置和相对速度,木牛雷达能够将所获取的信息发送至运输车的信号接收装置,质量传感器为压阻式质量传感器,质量传感器装配在运输车的车厢内,wifi数据收发装置装配在收割机和运输车的驾驶室内,wifi数据收发装置的型号为tlg09ua01,wifi数据收发装置的输入端与收割机的ecu单元相连接,wifi数据收发装置的输出端与运输车的ecu单元相连接,wifi数据收发装置能够接收发送存储来自速度传感器、加速度传感器、质量传感器和木牛雷达的
信息,wifi数据收发装置每次的数据收发的刷新频率为100hz。
8.脱离决策模块内包括有ecu控制单元,ecu控制单元依据信息获取模块获取的目标信息,对运输车是否需要脱离跟随进行判断,如果信息获取模块内的质量传感器获得的质量信息m大于等于初始设定的质量信息m0,则脱离决策模块内的ecu控制单元对运输车进行脱离决策,ecu控制单元通过wifi数据收发装置,将脱离信号发送至运输车,如果信息获取模块内的质量传感器获得的质量信息m小于初始设定的质量信息m0,则ecu控制单元对获取的质量信息、加速度信息和相对速度信息通过wifi数据收发装置将数据信息发送至运输车。
9.跟随执行模块内也包括有ecu控制单元,ecu控制单元一方面通过神经网络pid模型控制算法控制运输车进行同步行驶,控制运输车达到期望的跟随速度与加速度,另一方面当系统接收到脱离信号后,使运输车脱离跟随,神经网络pid模型算法首先通过速度传感器、加速度传感器、质量传感器获取的信息,获取的信息包括收割机速度信息、收割机加速度信息、运输车质量信息、收割机和运输车相对位置以及收割机和运输车相对速度,计算出运输车期望的加速度,输入给pid控制器,pid控制器控制运输车的执行机构,实现收运过程的同步进行,具体公式如下:
10.期望加速度的计算公式
11.式中,a
max
为运输车最大制动减速度;
12.a1为收割机加速度;
13.v为收割机速度。
14.上述的信息获取模块、脱离决策模块、跟随执行模块、速度传感器、加速度传感器、质量传感器、木牛雷达、wifi数据收发装置和ecu控制单元均为现有设备的组装,因此,具体型号和规格没有进行赘述。
15.本发明提供的双农机收运同步方法,其方法包括如下步骤:
16.第一步、设置信息获取模块中的速度传感器、加速度传感器、质量传感器、木牛雷达和wifi数据收发装置;
17.第二步、收割机和运输车并排同步行驶,信息获取模块中的速度传感器、加速度传感器、质量传感器和木牛雷达开始工作,获取收割机速度信息、收割机加速度信息、运输车质量信息、收割机和运输车相对速度信息以及收割机和运输车位置信息,wifi数据收发装置将获取的信息通过无线信号传输至运输车;
18.第三步、运输车内脱离决策模块开始工作,通过判断运输车质量是否达到阈值,判断是否发送脱离信号,当运输车质量没有达到阈值时,运输车通过神经网络pid算法控制运输车同步行驶,pid控制器控制运输车的执行机构,达到期望的速度与加速度,当运输车质量达到所设定的阈值时,运输车发送脱离信号至收割机,不再进行同步行驶,具体算法如下:
19.控制器的架构分为两个组成部分,第一部分为pid控制器,第二部分为bp神经网络,pid控制器的控制参数需由bp神经网络不断调整,根据输入输出误差,通过自身的学习能力调整bp神经网络的加权系数,不断调节pid控制器的参数,使系统输出稳定;
20.bp神经网络采用3层bp结构,bp神经网络包含三个输入节点、四个隐含节点和三个
输出节点;输入节点分别对应输入量、输出量和偏差量;输出节点分别对应pid控制器的三个参数,具体如下:
21.步骤一、执行模块采用的bp神经网络算法以梯度下降法作为神经网络模型的训练方法,其迭代公式ω
i+1
=ω
i-di*ηi;式中:ω
i+1
为第i+1个更新结果,d为第i个结果的距离误差,η为学习效率;
22.步骤二、bp神经网络神经网络的学习效率在0.01—0.08间选取,如果选择的值过大会导致收敛过快,系统震荡不稳定的问题,如果学习效率过小,则会导致bp神经网络的训练速度过慢;
23.步骤三、pid控制器的参数由三类参数组成,即比例k
p
、积分ki和微分kd,使用θ表征pid参数,设定参数θ的累计平方梯度r的初始值为0,其更新公式如下:
[0024][0025][0026]
式中:g为参数的梯度;η为学习效率。
[0027]
本发明的有益效果:
[0028]
本发明提供的双农机收运同步系统及方法实现了农机收运过程的同步进行,减少了劳动力的投入,准确率更高,解决了现有跟随算法在处理农机收运过程的局限性问题。另一方面,本发明提供的技术方案能够显著降低收运过程的事故发生的率,提高了安全性。本发明提供的同步收运较传统双农机自动化程度高,保证了收运过程中的粮食不会出现遗落,降低了粮食的丢失率,间接提升了粮食的产量。脱离过程保证两农机始终在有效工作,提高了资源的利用率。
附图说明
[0029]
图1为本发明所述的双农机收运系统结构框图。
[0030]
图2为本发明所述的神经网络pid控制算法原理示意图。
具体实施方式
[0031]
请参阅图1至图2所示:
[0032]
本发明提供的双农机收运同步系统包括有信息获取模块、脱离决策模块和跟随执行模块,其中信息获取模块输出端和脱离决策模块输入端相连,信息获取模块输出端同时与跟随执行模块输入端相连,脱离决策模块输出端和跟随执行模块相连,信息获取模块内设置的传感器和木牛雷达通过总线与农机直接相连,信息获取模块内设置的wifi数据收发装置通过无线信号与农机相连,wifi数据收发装置通过农机总线及无线信号将信息获取模块获取的信息发送至脱离决策模块及跟随执行模块,跟随执行模块根据决策结果控制农机的制动踏板、油门踏板的工作从而进行农机的同步收运。
[0033]
信息获取模块包括有速度传感器、加速度传感器、质量传感器、木牛雷达和wifi数据收发装置,其中速度传感器采用森尼克速度传感器,速度传感器装配在收割机左侧车轮处,速度传感器能够实时获取收割机的速度信息,加速度传感器采用压阻式加速度传感器,加速度传感器装配在收割机车轮的右侧,加速度传感器能够实时获取收割机的加速度,木
牛雷达装配在运输车的左侧车厢处,木牛雷达能够实时获取收割机和运输车的相对位置和相对速度,木牛雷达能够将所获取的信息发送至运输车的信号接收装置,质量传感器为压阻式质量传感器,质量传感器装配在运输车的车厢内,wifi数据收发装置装配在收割机和运输车的驾驶室内,wifi数据收发装置的型号为tlg09ua01,wifi数据收发装置的输入端与收割机的ecu单元相连接,wifi数据收发装置的输出端与运输车的ecu单元相连接,wifi数据收发装置能够接收发送存储来自速度传感器、加速度传感器、质量传感器和木牛雷达的信息,wifi数据收发装置每次的数据收发的刷新频率为100hz。
[0034]
脱离决策模块内包括有ecu控制单元,ecu控制单元依据信息获取模块获取的目标信息,对运输车是否需要脱离跟随进行判断,如果信息获取模块内的质量传感器获得的质量信息m大于等于初始设定的质量信息m0,则脱离决策模块内的ecu控制单元对运输车进行脱离决策,ecu控制单元通过wifi数据收发装置,将脱离信号发送至运输车,如果信息获取模块内的质量传感器获得的质量信息m小于初始设定的质量信息m0,则ecu控制单元对获取的质量信息、加速度信息和相对速度信息通过wifi数据收发装置将数据信息发送至运输车。
[0035]
跟随执行模块内也包括有ecu控制单元,ecu控制单元一方面通过神经网络pid模型控制算法控制运输车进行同步行驶,控制运输车达到期望的跟随速度与加速度,另一方面当系统接收到脱离信号后,使运输车脱离跟随,神经网络pid模型算法首先通过速度传感器、加速度传感器、质量传感器获取的信息,获取的信息包括收割机速度信息、收割机加速度信息、运输车质量信息、收割机和运输车相对位置以及收割机和运输车相对速度,计算出运输车期望的加速度,输入给pid控制器,pid控制器控制运输车的执行机构,实现收运过程的同步进行,具体公式如下:
[0036]
期望加速度的计算公式
[0037]
式中,a
max
为运输车最大制动减速度;
[0038]
a1为收割机加速度;
[0039]
v为收割机速度。
[0040]
上述的信息获取模块、脱离决策模块、跟随执行模块、速度传感器、加速度传感器、质量传感器、木牛雷达、wifi数据收发装置和ecu控制单元均为现有设备的组装,因此,具体型号和规格没有进行赘述。
[0041]
本发明提供的双农机收运同步方法,其方法包括如下步骤:
[0042]
第一步、设置信息获取模块中的速度传感器、加速度传感器、质量传感器、木牛雷达和wifi数据收发装置;
[0043]
第二步、收割机和运输车并排同步行驶,信息获取模块中的速度传感器、加速度传感器、质量传感器和木牛雷达开始工作,获取收割机速度信息、收割机加速度信息、运输车质量信息、收割机和运输车相对速度信息以及收割机和运输车位置信息,wifi数据收发装置将获取的信息通过无线信号传输至运输车;
[0044]
第三步、运输车内脱离决策模块开始工作,通过判断运输车质量是否达到阈值,判断是否发送脱离信号,当运输车质量没有达到阈值时,运输车通过神经网络pid算法控制运输车同步行驶,pid控制器控制运输车的执行机构,达到期望的速度与加速度,当运输车质
量达到所设定的阈值时,运输车发送脱离信号至收割机,不再进行同步行驶,具体算法如下:
[0045]
控制器的架构分为两个组成部分,第一部分为pid控制器,第二部分为bp神经网络,pid控制器的控制参数需由bp神经网络不断调整,根据输入输出误差,通过自身的学习能力调整bp神经网络的加权系数,不断调节pid控制器的参数,使系统输出稳定;
[0046]
bp神经网络采用3层bp结构,bp神经网络包含三个输入节点、四个隐含节点和三个输出节点;输入节点分别对应输入量、输出量和偏差量;输出节点分别对应pid控制器的三个参数,具体如下:
[0047]
步骤一、执行模块采用的bp神经网络算法以梯度下降法作为神经网络模型的训练方法,其迭代公式ω
i+1
=ω
i-di*ηi;式中:ω
i+1
为第i+1个更新结果,di为第i个结果的距离误差,η为学习效率;
[0048]
步骤二、bp神经网络神经网络的学习效率在0.01—0.08间选取,如果选择的值过大会导致收敛过快,系统震荡不稳定的问题,如果学习效率过小,则会导致bp神经网络的训练速度过慢;
[0049]
步骤三、pid控制器的参数由三类参数组成,即比例k
p
、积分ki和微分kd,使用θ表征pid参数,设定参数θ的累计平方梯度r的初始值为0,其更新公式如下:
[0050][0051][0052]
式中:g为参数的梯度;η为学习效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1