坡道保持辅助的制作方法
1.本公开涉及坡道保持辅助系统,并且更具体地涉及独立于道路坡度操作的坡道保持辅助系统。
背景技术:
2.车辆在上坡道路上从静止状态起步可能具有挑战性。在起步时,驾驶员必须协调释放制动器与施加加速踏板,使得避免车辆倒退。这可能涉及用左脚控制制动踏板,同时用右脚控制加速踏板。当正确完成时,该技术可以允许驾驶员车辆起步而不倒退。
技术实现要素:
3.根据一个实施例,一种车辆包括动力传动系统,所述动力传动系统具有动力装置和变速器。所述变速器具有可操作地联接到所述动力装置的输入轴和可操作地联接到从动轮的输出轴。车辆控制器被编程为响应于施加制动踏板、所述输出轴的转速小于阈值转速以及加速踏板的位置小于阈值位置,不管道路坡度如何都自动地接合摩擦制动器,并且尽管随后释放所述制动踏板,但仍继续接合所述摩擦制动器,使得所述摩擦制动器被接合以独立于所述道路坡度而保持所述车辆静止。所述控制器还被编程为响应于所述加速踏板的位置大于第二阈值位置而释放所述摩擦制动器。
4.根据另一个实施例,一种用于机动车辆的坡道保持辅助系统包括:空气压力传感器,所述空气压力传感器被配置为输出指示空气制动系统的空气压力的空气压力信号;制动踏板位置传感器,所述制动踏板位置传感器被配置为输出指示制动踏板位置的制动踏板信号;以及加速踏板位置传感器,所述加速踏板位置传感器被配置为输出指示加速踏板位置的加速踏板信号。控制器被编程为响应于所述制动踏板位置超过阈值、所述空气压力信号超过阈值压力并且所述加速踏板位置小于阈值,不管道路坡度如何都自动地接合摩擦制动器,并且尽管随后所述制动踏板位置改变,但仍继续接合所述摩擦制动器,使得所述摩擦制动器被接合以独立于所述道路坡度而保持所述车辆静止。所述控制器还被编程为响应于所述加速踏板位置超过所述阈值而释放所述摩擦制动器。
5.根据又一个实施例,一种操作车辆中的坡道保持辅助的方法包括:当车辆速度为零、施加制动踏板并且加速踏板位置小于第一阈值时,响应于激活坡道保持辅助,不管道路坡度如何都接合摩擦制动器以保持车辆静止;尽管在所述坡道保持辅助期间释放了所述制动踏板,但仍继续施加所述制动器;以及当所述加速踏板位置超过第二阈值时,响应于停用坡道保持辅助而释放所述摩擦制动器。
附图说明
6.图1是具有坡道保持辅助系统的示例性车辆的示意图。
7.图2是用于操作坡道辅助系统的算法的流程图。
具体实施方式
8.本文中描述了本公开的实施例。然而,应当理解,所公开的实施例仅仅是示例并且其他实施例可以呈现各种和替代形式。附图不一定按比例绘制;一些特征可能被夸大或最小化以示出特定部件的细节。因此,本文公开的具体结构细节和功能细节不应解释为限制性的,而仅应解释为用于教导本领域技术人员以各种形式利用本发明的代表性基础。如本领域普通技术人员将理解,参考附图中的任一者示出和描述的各种特征可以与一个或多个其他附图中示出的特征组合以产生未明确地示出或描述的实施例。所示特征的组合提供典型应用的代表性实施例。然而,对于特定的应用或实施方式,可能期望与本公开的教导一致的对特征的各种组合和修改。
9.参考图1,车辆10可以是机动车辆,如卡车、轿车、suv等。在一个或多个实施例中,车辆10可以包括用于运输货物的拖车。车辆10可以具有动力传动系统12,所述动力传动系统向一个或多个车轮总成14提供扭矩以推进车辆10。车轮总成14可以包括支撑至少一个轮胎26的至少一个车轮28。在所示实施例中,每个车轮总成14包括单个轮胎和单个车轮,然而,在其他实施例中,车轮总成可以包括两个车轮和两个轮胎(例如,“双轮胎”)。车辆10被示出为具有四个车轮总成14,然而,在其他实施例中,车辆10可以包括六个车轮总成,例如,三车桥车辆。动力传动系统12可以包括发动机20、变速器22和至少一个从动车桥24。发动机20可以提供用于使一个或多个车轮总成14旋转以推进车辆10的动力或推进扭矩。在至少一个实施例中,发动机20可以被配置为内燃发动机,其可以适于燃烧任何合适类型的燃料,诸如汽油、柴油或氢气。
10.变速器22可以包括联接到发动机20的曲轴的输入轴25和联接到驱动轴30的输出轴27。变速器22可以是任何合适的类型,诸如本领域技术人员已知的多齿轮“阶梯传动比”变速器。如本文所使用的,术语变速器还可以涵盖或包括可以提供多轮驱动或全轮驱动能力的分动箱。
11.从动车桥24包括通过车桥34(例如,半轴)可驱动地连接到车轮总成14的差速器29。车辆10还可以包括前车桥36,所述前车桥可以被配置为使车辆10转向。前车桥36可以被配置为或可以不被配置为向至少一个相关联的车轮总成14提供扭矩的驱动车桥。
12.车辆10可以被设置有制动系统40。制动系统40可以包括摩擦制动器42或摩擦制动系统。摩擦制动器42(其也可称为行车制动器)被配置为减慢或禁止至少一个相关联的车轮总成14的旋转。每个摩擦制动器42可以靠近车轮总成14设置,并且可以包括至少一个制动衬块总成和制动摩擦构件。制动衬块总成可以具有摩擦材料,所述摩擦材料也可以被称为制动衬片,所述制动衬片可以在车辆制动期间接合制动摩擦构件并且在未施加摩擦制动器42时可以与制动摩擦构件间隔开。更具体地,当请求或命令制动时,制动衬块总成可以接合制动摩擦构件,使得由制动衬块总成施加在制动摩擦构件上的摩擦力延迟或减慢其相关联的车轮总成14的旋转。当不请求或施加制动时,制动衬块总成可以与制动摩擦构件间隔开。因而,当不请求制动时,制动摩擦构件可以与车轮总成14一起旋转并且相对于制动衬块总成旋转。
13.摩擦制动器42可以具有任何合适的配置。例如,摩擦制动器42可以被配置为鼓式制动器或盘式制动器。在盘式制动器配置中,制动摩擦构件可以被配置为转子,并且第一制动衬块总成和第二制动衬块总成可以被配置为接合转子的相对侧以减慢车轮总成14的旋
转。在鼓式制动器配置中,制动摩擦构件可以是制动鼓,所述制动鼓可以完全围绕第一制动衬块总成和第二制动衬块总成延伸,所述第一制动衬块总成和第二制动衬块总成可以被配置为接合制动鼓以减慢车轮总成14的旋转。制动鼓可以设置在车轮总成14与可以可旋转地支撑车轮总成14的轮毂总成之间。
14.摩擦制动器42可以使用任何合适的致动器或致动系统来致动制动衬块总成。例如,可以采用本领域技术人员已知的气动、液压、电气或机电致动系统。在图1中,摩擦制动器42具有通常被称为空气制动系统的气动配置。空气制动系统包括压缩机,所述压缩机将空气加压到加压气体源46中。压缩机44可以由发动机20经由皮带传动、曲轴、动力输出单元等提供动力。
15.加压气体源46与制动控制单元48流体连通。加压气体源46可以被配置为供应和/或存储一定体积的加压气体或加压气体混合物,诸如空气和/或氮气。加压气体源46可以设置在车辆10上,并且可以被配置为以足以致动一个或多个摩擦制动器42的压力提供加压气体或加压气体混合物。加压气体源46还可以向其他车辆部件提供加压气体。加压气体源可以是被配置为容纳压缩空气的一个或多个储存罐。
16.制动控制单元48可以流体地连接到加压气体源46。当采用气动摩擦制动器致动系统时也可以称为制动气动单元(bpu)的制动控制单元48可以通过控制制动衬块总成的致动或制动踏板总成与制动摩擦构件的接合和脱离来控制摩擦制动器42的操作。例如,制动控制单元48可以包括一个或多个阀,所述一个或多个阀可以控制从加压气体源46流向摩擦制动器42和/或从摩擦制动器流出的加压气体,以使相关联的制动衬块总成前进和缩回。
17.驾驶员用制动踏板50控制制动系统40。制动踏板50可以机械地连结到制动控制单元48,或者可以与控制器52电通信。在这里,制动踏板50包括制动踏板传感器54,所述制动踏板传感器被配置为向控制器52输出指示制动踏板位置的信号。控制器52与制动控制单元48电通信,并且被配置为打开和关闭控制单元48内的阀以施加车轮总成14中的一者或多者的制动器42。控制器52可以被配置为基于经由制动踏板50来自驾驶员的输入来接合制动器42并且还基于操作模式中的感测状况来自动地接合制动器。
18.在一个或多个实施例中,可以提供制动踏板传感器54以检测可以由车辆驾驶员或车辆操作员提供的制动命令或制动扭矩命令。例如,制动踏板传感器54可以检测制动踏板50的位置或连接到制动踏板或由制动踏板操作的部件的位置或操作状态,所述部件诸如踏板阀,所述踏板阀可以调节可以提供给继动阀的控制流体,所述继动阀可以控制对一个或多个摩擦制动器42或摩擦制动器致动器的流体供应。替代地,制动踏板传感器54可以被配置为可以检测流体压力的压力传感器,所述流体压力可以直接或间接地控制车辆10的制动致动器或制动。检测到的制动踏板位置和/或检测到的压力可以用于控制提供给控制器52的信号。
19.车辆10还包括加速踏板58,所述加速踏板控制对动力传动系统12的驾驶员要求的扭矩。加速踏板58包括相关联的传感器56,所述传感器被配置为向控制器52输出指示加速踏板位置的信号。控制器52被编程为接收加速踏板位置并计算驾驶员要求的扭矩,然后向动力传动系统12命令所述驾驶员要求的扭矩以相应地推进车辆。
20.可以提供轮速传感器72以检测或提供指示车轮总成14或车轮28的转速的数据。轮速传感器72可以是任何合适的类型,并且可以被配置为检测车轮总成14或相关联的轮轴34
的转速。来自轮速传感器72的数据也可以用于确定车辆10的行驶距离。例如,行驶距离可以基于轮胎尺寸(例如,轮胎直径)和由轮速传感器72检测到的旋转距离或转数。在至少一个实施例中,轮速传感器72可以与每个车轮总成14或轮轴34相关联,诸如可以被设置有防抱死制动(abs)系统、牵引力控制系统和/或电子稳定性控制(esc)系统。因而,轮速传感器72可以通过本领域技术人员已知的方式检测车轮总成14的车轮滑移或意外旋转。
21.还可以提供车辆速度传感器74以检测或提供指示车辆10的速度的数据。车辆速度传感器74可以与轮速传感器72分开,并且可以被设置有传动系部件,诸如变速器22或变速驱动桥、驱动轴30或车桥总成轴,以基于传动系部件的转速来检测车辆速度。车辆速度传感器74也可以是虚拟传感器。例如,车辆速度传感器74可以采用可以无线传输到车辆10的数据,诸如可以提供给导航系统或由全球定位系统(gps)等提供的数据,以计算车辆10的速度。
22.变速器22可以包括与控制器52电通信的一个或多个速度传感器。例如,速度传感器76可以被配置为测量变速器输出轴27的转速并向控制器52输出指示变速器输出轴转速的信号。变速器22还可以被配置为输出指示变速器的驾驶模式的信号78。示例性驾驶模式包括驻车挡、倒挡、行驶挡、空挡、低速挡等。控制器还可以接收指示点火状态(例如,关闭、附件和运行)的信号80。制动系统40可以包括一个或多个压力传感器82,所述一个或多个压力传感器测量压缩空气压力并向控制器52输出指示所感测的空气压力的信号。
23.可以提供控制器52以监测和控制车辆10的各种部件和系统。例如,控制器52可以与传动系12的部件(诸如发动机20和变速器22)电连接或通信,以监测和控制它们的操作和性能。控制器52还可以监测和控制制动系统40。例如,控制器52可以监测和控制由摩擦制动器42提供的制动扭矩的量,并且可以控制制动器控制单元48的操作。因而,控制器52可以与制动系统40协作,以提供防抱死制动或防抱死制动系统(abs)功能性、牵引力控制功能性、坡道保持辅助和/或电子稳定性控制(esc)功能性。为了简单起见,图1中示出了单个控制器;然而,可以设想,车辆10可以设置有多个控制模块或控制器或分布式控制架构。如本文所使用的,对“控制器”的任何引用是指一个或多个控制器。另外,控制器52还可以处理来自如上所述的各种输入装置或传感器的输入信号或数据。
24.控制器52可以包括与各种类型的计算机可读存储装置或介质进行通信的微处理器或中央处理单元(cpu)。计算机可读存储装置或介质可以包括例如呈只读存储器(rom)、随机存取存储器(ram)和保活存储器(kam)的易失性和非易失性存储装置。kam是可用于在cpu断电时存储各种操作变量的持久性或非易失性存储器。计算机可读存储装置或介质可使用许多已知存储器装置中的任一种来实施,诸如prom(可编程只读存储器)、eprom(电prom)、eeprom(电可擦除prom)、快闪存储器或能够存储数据的任何其他电、磁性、光学或组合存储器装置,所述数据中的一些表示由控制器用于控制车辆的可执行指令。
25.在驾驶过程期间,车辆可能需要停在上坡道路上。当发生这种情况时,驾驶员必须小心地使车辆起步以防止倒退。(倒退是车辆意外沿反向方向行驶。起步是车辆从静止加速)。驾驶员可以通过同时操作制动踏板50和加速踏板58来缓解倒退,使得维持制动器直到动力传动系统扭矩足以克服重力和制动踏板的重量,以将车辆从静止状态向前推进。
26.坡道保持辅助是一种自动化车辆特征,其被设计成在车辆在上坡时缓解倒退和/或在下坡时防止无意的向前移动。无论道路坡度和制动踏板的接合状态如何,坡道保持辅
助都自动地接合摩擦制动器42以保持车辆静止。坡道保持辅助通过在车辆累积足够的扭矩的同时维持制动器的施加并且然后基于驾驶员要求的扭矩和/或加速踏板位置在适当时间自动释放制动器来简化驾驶员的上坡起步,使得车辆仅向前行驶而不会倒退。
27.一些坡道保持辅助系统基于感测到的道路坡度来操作。例如,仅当道路坡度超过阈值时,才可以激活坡道保持辅助。此类系统可以从感测数据(诸如加速度计)确定道路坡度。与确定道路坡度相关联的硬件和计算能力增加了成本。可以通过从坡道保持辅助的操作参数中去除道路坡度来消除这些成本。
28.虽然倒退在陡峭的上坡上最明显,但是它也可能发生在非平坦的任何坡道上。因此,从成本和操作角度来看,无论道路坡度如何,都可能有利于激活坡道保持辅助。在一些实施例中,车辆10可以包括加速度计和道路坡度确定软件,所述加速度计和道路坡度确定软件用于非坡道保持辅助的车辆功能性。
29.系统可以使用制动踏板位置、制动系统的气压、制动踏板踩下时间、车辆速度、点火状态、加速踏板位置、变速器模式、变速器输出轴转速、与前一坡道保持辅助事件的接近度以及对有效can信号的确定,而不是依赖于道路坡度来确定坡道保持辅助的激活或停用。如果信号和感测状况指示车辆停止,则激活坡道保持辅助。当激活坡道保持辅助时,控制器52命令摩擦制动器42接合。这可以包括操作控制单元48以将加压空气引导到制动总成14,以便将制动衬块与盘接合或将制动蹄与制动鼓接合。当状况改变以指示期望的车辆起步时,坡道保持辅助特征被停用并且控制器命令摩擦制动器42释放,同时控制动力传动系统12以向前推进车辆10而不倒退。
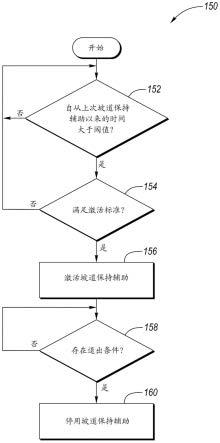
30.图2是用于控制坡道保持辅助的算法的流程图150。控制开始于操作152,其中控制器确定自从上次坡道保持辅助以来的时间是否超过阈值。阈值可以在20秒至120秒之间。计时器步骤152缓解了无意激活坡道保持辅助的情况,诸如在走走停停驾驶和类似的低速操纵期间。如果在操作152处为是,则控制器在操作154处确定是否满足坡道保持辅助的激活标准。
31.以下一者或多者是用于激活坡道保持辅助系统的示例性标准。控制器可以确定制动系统的空气压力是否超过最小阈值。在一些实施例中,压力可以以压力单位或扭矩单位表示。因此,阈值可以是压力值或扭矩值,这取决于控制系统的结构。显然,这种确定仅适用于包括空气制动器的车辆。如果车辆包括液压制动器,则不使用该标准。在操作154处,控制器可以确定是否施加了制动踏板,以及如果施加了制动踏板,则可以确定在释放之前持续了多长时间。如果制动踏板在被释放之前被施加了预定的最短持续时间,则可以满足该标准。控制器还可以接收车辆速度信号并确定车辆是否静止,以及如果静止,则确定持续了多长时间。一旦车辆静止达预定时间段,就可以满足该标准。控制器可以进一步检测或接收点火状态。如果点火状态在运行,则可以满足该标准。控制器还可以接收加速踏板位置信号以确定踏板位置是否小于阈值,例如5%。如果是,则可以满足该标准。控制器还可以接收变速器模式,并且如果模式处于行驶挡,则可以满足该标准。控制器还可以监测变速器输出轴的转速并将其与阈值进行比较。如果变速器输出轴转速小于阈值,例如2rpm至10rpm,则可以满足该标准。控制器还可以确定存在适当的can信号,并且如果否,则不满足该标准。
32.应当理解,在操作154处可以使用全部或仅一些上述标准来确定是否应激活坡道保持辅助。在一个实施例中,响应于施加制动踏板、输出轴的转速小于阈值转速以及加速踏
板的位置小于阈值位置,激活坡道保持辅助。可以进一步响应于车辆静止达阈值时间、空气制动压力超过阈值压力、变速器处于行驶挡和/或点火状态处于运行而激活坡道保持辅助。在另一个实施例中,响应于制动踏板位置超过阈值(这是确定施加制动踏板的一种示例性方式;在这里,阈值是低值)、空气压力信号超过阈值压力以及加速踏板位置小于阈值而满足激活标准。无论道路坡度如何,这都允许激活坡道保持辅助。在另一实施例中,当车辆速度为零、施加制动踏板、道路坡度未知以及加速踏板位置小于阈值时,满足所述标准。这些当然仅仅是示例,并且可以使用上述标准的任何组合来确定是否激活坡道保持辅助。
33.如果在操作154处为是,则控制转到操作156并且控制器激活坡道保持辅助。坡道保持辅助的激活可以触发控制器或一个或多个其他控制器以发送和接收信号以命令abs模块或其他控制模块接合制动系统。在上文示出的空气制动系统中,这可以包括操作制动控制模块48的阀以将加压空气引导到制动器。如果在操作154处为否,则不激活坡道保持辅助。
34.坡道保持辅助将保持活动状态以将车辆维持在静止位置,直到存在一个或多个退出条件。示例性退出条件包括踩下加速踏板超过阈值(该阈值可以与上文用于确定激活的阈值相同,或者可以是不同的阈值)、输出轴的转速超过阈值(该阈值可以与上文用于确定激活的阈值相同或者可以是不同的阈值)、点火状态从运行变为关闭或附件、车辆速度超过阈值、变速器从行驶挡换挡以及一个或多个can信号丢失达阈值时间段。响应于感测到这些退出条件中的任一者,可以停用坡道保持辅助。如果控制器在操作158处确定存在这些条件中的一者或多者,则控制转到操作160并且控制器停用坡道保持辅助。摩擦制动器响应于坡道保持辅助被停用而被释放,使得车辆可以向前推进。
35.控制150独立于任何道路坡度确定,并且因此可以在道路坡度未知的情况下执行。这消除了对昂贵的附加传感器和计算能力的需要。
36.尽管上文描述了示例性实施例,但这些实施例并不意图描述权利要求所涵盖的所有可能形式。在说明书中使用的词语是描述词语而非限制性词语,并且应当理解,在不脱离本公开的精神和范围的情况下,可以做出各种改变。如先前所述,各种实施例的特征可以组合以形成可能未明确描述或示出的本发明的另外的实施例。尽管各种实施例可能已经被描述为就一个或多个期望的特性而言提供优点或优于其他实施例或现有技术实施方式,但是本领域普通技术人员认识到,可以折衷一个或多个特征或特性以实现期望的整体系统属性,这取决于具体应用和实施方式。这些属性可以包括但不限于成本、强度、耐久性、生命周期成本、可销售性、外观、包装、大小、可维护性、重量、可制造性、易组装性等。因此,就一个或多个特性而言被描述为不如其他实施例或现有技术实施方式期望的实施例处在本公开的范围内,并且对于特定应用来说可能是期望的。
37.根据本发明,提供了一种车辆,所述车辆具有:动力传动系统,所述动力传动系统包括动力装置和变速器,所述变速器具有可操作地联接到所述动力装置的输入轴和可操作地联接到从动轮的输出轴;以及控制器,所述控制器被编程为:(i)响应于施加制动踏板、(ii)所述输出轴的转速小于阈值转速、以及(iii)加速踏板的位置小于阈值位置,不管道路坡度如何都自动地接合摩擦制动器,并且尽管随后释放所述制动踏板,但仍继续接合所述摩擦制动器,使得所述摩擦制动器被接合以独立于所述道路坡度而保持所述车辆静止,并且响应于所述加速踏板的位置大于第二阈值位置而释放所述摩擦制动器。
38.根据一个实施例,所述阈值转速在每秒一转与四转之间,包括端值。
39.根据一个实施例,所述控制器被编程为进一步响应于所述车辆静止达阈值时间而自动地接合所述摩擦制动器。
40.根据一个实施例,所述控制器被编程为进一步响应于空气制动压力超过阈值压力而自动地接合所述摩擦制动器。
41.根据一个实施例,所述控制器被编程为进一步响应于所述变速器处于行驶挡而自动地接合所述摩擦制动器。
42.根据一个实施例,所述控制器还被编程为进一步响应于所述输出轴的所述转速超过所述阈值而释放所述摩擦制动器。
43.根据一个实施例,本发明的特征还在于空气制动系统,所述空气制动系统包括压缩机、罐、连接在所述摩擦制动器与所述罐之间的空气管线以及被配置为调节所述空气管线中的压力的阀,其中所述自动地接合所述摩擦制动器包括致动所述阀以将加压空气引导到所述摩擦制动器。
44.根据一个实施例,所述控制器被编程为进一步响应于所述罐内的空气压力超过阈值压力而自动地接合所述摩擦制动器。
45.根据一个实施例,所述动力装置是发动机。
46.根据本发明,提供了一种用于机动车辆的坡道保持辅助的系统,所述系统包括:空气压力传感器,所述空气压力传感器被配置为输出指示空气制动系统的空气压力的空气压力信号;制动踏板位置传感器,所述制动踏板位置传感器被配置为输出指示制动踏板位置的制动踏板信号;加速踏板位置传感器,所述加速踏板位置传感器被配置为输出指示加速踏板位置的加速踏板信号;以及控制器,所述控制器被编程为:响应于(i)所述制动踏板位置超过阈值、(ii)所述空气压力信号超过阈值压力、以及(iii)所述加速踏板位置小于阈值,不管道路坡度如何都自动地接合摩擦制动器,并且尽管随后所述制动踏板位置改变,但仍继续接合所述摩擦制动器,使得所述摩擦制动器被接合以独立于所述道路坡度而保持所述车辆静止,并且响应于所述加速踏板位置超过所述阈值而释放所述摩擦制动器。
47.根据一个实施例,本发明的特征还在于速度传感器,所述速度传感器被配置为输出指示车辆速度的信号,并且其中所述控制器被编程为进一步响应于所述车辆速度为零达阈值时间而自动地接合所述摩擦制动器。
48.根据一个实施例,本发明的特征还在于速度传感器,所述速度传感器被配置为输出指示变速器输出轴转速的信号,并且其中所述控制器被编程为进一步响应于所述变速器输出轴转速小于阈值而自动地接合所述摩擦制动器。
49.根据一个实施例,本发明的特征还在于速度传感器,所述速度传感器被配置为输出指示车辆速度的信号,并且其中所述控制器被编程为进一步响应于所述车辆速度为零达阈值时间而自动地接合所述摩擦制动器。
50.根据一个实施例,本发明的特征还在于空气制动系统,所述空气制动系统包括所述模式制动器、所述空气压力传感器、压缩机、罐、连接在所述摩擦制动器与所述罐之间的空气管线以及被配置为调节所述空气管线中的压力的阀,其中所述自动地接合所述摩擦制动器包括致动所述阀以将加压空气引导到所述摩擦制动器。
51.根据本发明,一种操作车辆中的坡道保持辅助的方法包括:当车辆速度为零、施加
制动踏板并且加速踏板位置小于第一阈值时,响应于激活坡道保持辅助,不管道路坡度如何都接合摩擦制动器以保持车辆静止;以及当所述加速踏板位置超过第二阈值时,响应于停用坡道保持辅助而释放所述摩擦制动器。
52.在本发明的一个方面中,当所述变速器输出轴转速小于第三阈值并且所述道路坡度未知时,进一步激活所述坡道保持辅助。
53.在本发明的一个方面中,当所述输出轴的所述转速超过所述第三阈值时,进一步停用所述坡道保持辅助。
54.在本发明的一个方面中,当空气制动系统的压力超过阈值压力时,进一步激活所述坡道保持辅助。
55.在本发明的一个方面中,当所述车辆的变速器处于行驶挡时,进一步激活所述坡道保持辅助。
56.在本发明的一个方面中,所述第一阈值和所述第二阈值具有相同的值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1