摩托车控制方法、系统及摩托车与流程
本技术涉及车辆控制,尤其涉及一种摩托车控制方法、系统及摩托车。
背景技术:
1、目前,摩托车尤其是电动摩托车已经成为一种非常普及的交通工具。摩托车的驾驶者可以通过转把非常方便地表达驾驶意图,例如驾驶者可以转动转把,以使摩托车的电机输出更大的驱动力(转矩),而电机输出的驱动力再可以但不限于通过离合器、变速器、齿轮箱等机构逐级输出至一个主驱动轮(一般为后轮),从而使摩托车进行加速。又或者驾驶者可以将转把角度归零,以使摩托车的电机输出电磁制动力,最终使摩托车实现制动。
2、然而,在现有的摩托车的控制方式中,根据预先的设置,在驾驶者将转把角度归零时,电机只会输出固定的或预设的制动力,而在驾驶者转动转把时,电机只是输出与转把信号相适应的驱动力,不能进行额外的调节,也不能适应各种路况,当摩托车行驶在低附着路面时,当制动力或驱动力超出路面与轮胎之间摩擦力的最大数值时,摩托车就容易出现车轮打滑的现象,从而危害行车安全。
技术实现思路
1、本技术实施例提供了一种摩托车控制方法、系统、存储介质及摩托车,可以对摩托车行车过程中是否发生车轮打滑进行检测,在检测到打滑现象时,对摩托车输出的制动力或驱动力进行适应性调节,从而对摩托车的打滑现象进行抑制,提高摩托车的行车安全。
2、第一方面,本技术实施例提供一种摩托车控制方法,所述方法包括:
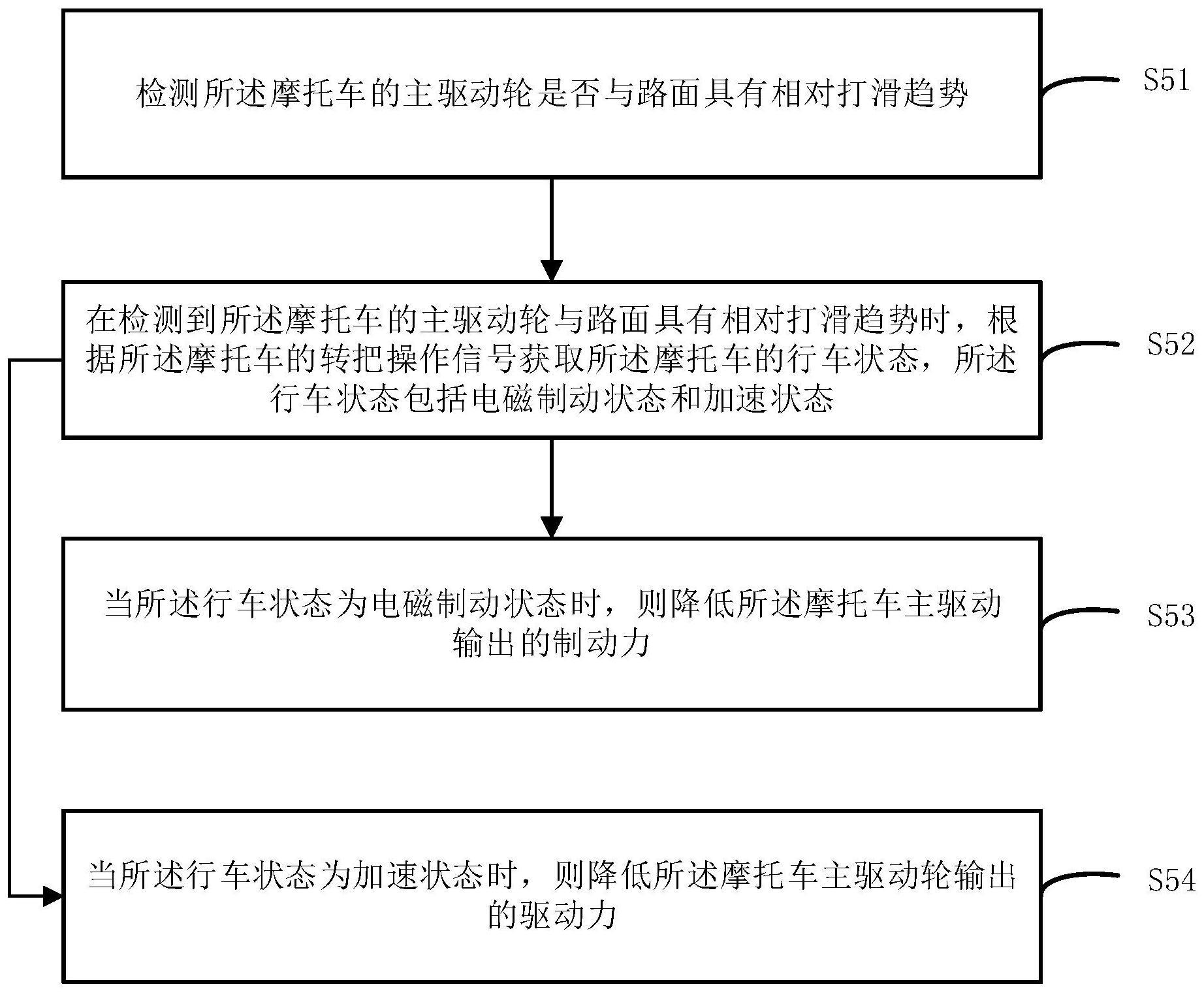
3、检测摩托车的主驱动轮是否产生打滑趋势;
4、在检测到所述摩托车的主驱动轮产生打滑趋势时,根据所述摩托车的转把操作信号获取所述摩托车的行车状态,所述行车状态为电磁制动状态或加速状态;
5、当所述行车状态为电磁制动状态时,则降低所述摩托车主驱动轮输出的制动力;
6、当所述行车状态为加速状态时,则降低所述摩托车主驱动轮输出的驱动力。
7、在其中一种可能的实现方式中,所述检测所述摩托车的主驱动轮是否产生打滑趋势的步骤,包括:
8、采集所述主驱动轮的第一轮速,并检测所述第一轮速的变化率是否超过预设第一阈值,在所述第一轮速的变化率超过所述预设第一阈值时,则确定所述摩托车的主驱动轮与路面具有相对打滑趋势;和/或
9、采集所述主驱动轮的第一轮速和所述摩托车从动轮的第二轮速,并检测所述第一轮速与第二轮速的差值是否超过第二预设阈值,在所述第一轮速与所述第二轮速的差值超过所述第二阈值时,则确定所述摩托车的主驱动轮与路面具有相对打滑趋势。
10、在其中一种可能的实现方式中,所述降低所述摩托车主驱动轮制动力的输出的步骤,包括:
11、输出第一控制信号,以控制所述摩托车的电机降低制动力的输出;和/或
12、输出第二控制信号,以对所述摩托车的从动轮进行限速,从而等效降低所述摩托车主驱动轮输出的制动力。
13、在其中一种可能的实现方式中,所述降低所述摩托车主驱动轮驱动力的输出的步骤,包括:
14、输出第三控制信号,以控制所述摩托车的电机降低驱动力的输出;和/或
15、输出第四控制信号,以对所述摩托车的主驱动轮进行限速,从而等效降低所述摩托车主驱动轮输出的驱动力。
16、第二方面,本技术实施例提供一种摩托车控制系统,所述系统包括打滑检测装置、转把以及电子控制器,所述打滑检测装置和所述转把分别连接所述电子控制器;
17、所述打滑检测装置,用于检测所述摩托车的主驱动轮是否产生打滑趋势;
18、所述电子控制器,用于根据所述摩托车的转把操作信号获取所述摩托车的行车状态,所述行车状态为电磁制动状态或加速状态;
19、所述电子控制器,还用于在检测到所述摩托车的主驱动轮产生打滑趋势时,且所述行车状态为电磁制动状态时,输出降低所述摩托车主驱动轮输出的制动力的控制信号;
20、所述电子控制器,还用于在检测到所述摩托车的主驱动轮产生打滑趋势时,且所述行车状态为加速状态时,输出降低所述摩托车主驱动轮输出的驱动力的控制信号。
21、在其中一种可能的实现方式中,所述打滑检测装置,用于采集所述主驱动轮的第一轮速,并检测所述第一轮速的变化率是否超过预设第一阈值,在所述第一轮速的变化率超过所述预设第一阈值时,则确定所述摩托车的主驱动轮与路面具有相对打滑趋势;和/或
22、所述打滑检测装置,用于采集所述主驱动轮的第一轮速和所述摩托车从动轮的第二轮速,并检测所述第一轮速与第二轮速的差值是否超过第二预设阈值,在所述第一轮速与所述第二轮速的差值超过所述第二阈值时,则确定所述摩托车的主驱动轮与路面具有相对打滑趋势。
23、在其中一种可能的实现方式中,所述电子控制器包括电机控制器,所述电机控制器连接所述摩托车的电机;
24、所述电机控制器,用于在检测到所述摩托车的主驱动轮与路面具有相对打滑趋势时,且所述行车状态为电磁制动状态时,输出第一控制信号,以控制所述摩托车的电机降低制动力的输出;
25、所述电机控制器,还用于在检测到所述摩托车的主驱动轮与路面具有相对打滑趋势时,且所述行车状态为加速状态时,输出第三控制信号,以控制所述摩托车的电机降低驱动力的输出。
26、在其中一种可能的实现方式中,所述电子控制器包括车身控制器,所述车身控制器连接所述主驱动轮的刹车制动器和所述摩托车从动轮的刹车制动器:
27、所述车身控制器,用于在检测到所述摩托车的主驱动轮与路面具有相对打滑趋势时,且所述行车状态为电磁制动状态时,输出第二控制信号,以控制所述摩托车从动轮的刹车制动器进行制动,从而对所述摩托车的从动轮进行限速;
28、所述车身控制器,还用于在检测到所述摩托车的主驱动轮与路面具有相对打滑趋势时,且所述行车状态为加速状态时,输出第四控制信号,以控制所述主驱动轮的刹车制动器进行制动,从而对所述摩托车的主驱动轮进行限速。
29、在其中一种可能的实现方式中,所述电子控制器包括电机控制器和车身控制器,所述电机控制器连接所述摩托车的电机,所述车身控制器连接所述主驱动轮的刹车制动器和所述摩托车从动轮的刹车制动器;所述电机控制器和所述车身控制器通过通信总线相连接;
30、所述电机控制器,用于在检测到所述摩托车的主驱动轮与路面具有相对打滑趋势时,且所述行车状态为电磁制动状态时,输出第一控制信号,以控制所述摩托车的电机降低制动力的输出;所述车身控制器,用于输出第二控制信号,以控制所述摩托车从动轮的刹车制动器进行制动,从而对所述摩托车的从动轮进行限速;
31、所述电机控制器,还用于在检测到所述摩托车的主驱动轮与路面具有相对打滑趋势时,且所述行车状态为加速状态时,输出第三控制信号,以控制所述摩托车的电机降低驱动力的输出;所述车身控制器,还用于输出第四控制信号,以控制所述主驱动轮的刹车制动器进行制动,从而对所述摩托车的主驱动轮进行限速。
32、第三方面,本技术实施例还提供一种摩托车,所述摩托车包括上述第二方面所述的摩托车控制系统。
33、上述技术方案中,首先检测摩托车的主驱动轮是否与路面具有相对打滑趋势,若检测到主驱动轮与路面具有相对打滑趋势,则根据摩托车的转把获取摩托车的行车状态,分为电磁制动状态和加速状态,在电磁制动状态下,控制降低摩托车主驱动轮制动力的输出,而在加速状态下,控制降低摩托车主驱动轮驱动力的输出,从而可以对摩托车的打滑现象进行抑制,提高摩托车的行车安全。
- 还没有人留言评论。精彩留言会获得点赞!