车辆集成电源及其控制方法与流程
车辆集成电源及其控制方法
1.相关申请的交叉引用
2.本技术要求于2021年6月17日在韩国知识产权局提交的申请号为10-2021-0078510的韩国专利申请的优先权和权益,该韩国专利申请的全部内容通过引用并入本文。
技术领域
3.本公开涉及一种车辆集成电源及其控制方法。更具体地,本公开涉及一种可以在故障保护时提高供电效率的车辆集成电源及其控制方法。
背景技术:
4.在诸如电动卡车、氢动力卡车、电动巴士和氢动力巴士的商用环保车辆中,与一般车辆不同,包括使用24v电源的电负载和使用12v电源的电负载。
5.为了给使用12v电源的12v电负载和使用24v电源的24v电负载顺利供电,使用低压dc-dc转换器(low voltage dc-dc converter,以下称为ldc)、电池均衡器(battery equalizer,以下称为beq)以及能够为12v电负载和24v电负载供电的两个辅助电池。整个电负载由ldc供电,beq从ldc接收24v电源并为12v电负载供电,从而防止为12v电负载供电的辅助电池过度放电并平衡两个辅助电池。
6.然而,当ldc发生故障时,两个辅助电池都可能放电,从而使车辆处于危险的境地。另外,当beq发生故障时,为12v电负载供电的辅助电池可能会过度放电,导致12v电负载无法操作的情况。
7.本背景技术部分所公开的上述内容仅是为了增进对本发明背景的理解,因此其中可能包含不构成本领域普通技术人员已知的现有技术的信息。
技术实现要素:
8.本公开的实施例致力于提供一种可以稳定地向12v电负载和24v电负载供电并在故障保护时提高供电效率的集成电源及其控制方法。
9.本公开的实施例提供一种集成电源,包括:第一低压dc-dc转换器(ldc),将供应电源转换为第一输出电压,并将第一输出电压提供给彼此并联连接的第一辅助电池和第一电负载;第二ldc,将供应电源转换为第二输出电压,并将第二输出电压提供给彼此并联连接的第二辅助电池和第二电负载;以及集成控制器,控制第一ldc和第二ldc以改变第一ldc和第二ldc的输出电压。第一辅助电池和第二辅助电池串联连接,并且当第一ldc发生故障时,第二ldc根据集成控制器的控制输出高于第二输出电压的第二增加输出电压。
10.当第二ldc发生故障时,第一ldc可以根据集成控制器的控制输出高于第一输出电压的第一增加输出电压。
11.当第一ldc发生故障或第二ldc发生故障时,集成控制器可以通过can通信向车辆控制单元(vcu)或电子控制单元(ecu)请求故障保护。
12.第二ldc可以调节从第二ldc的输出端输出的第二输出电压的电流量,使得与从第
一辅助电池和第二辅助电池之间的节点流到第二电负载的电流量相同,从而平衡第一辅助电池和第二辅助电池。
13.本公开的另一实施例提供一种集成电源的控制方法,该集成电源包括将第一输出电压提供给彼此并联连接的第一辅助电池和第一电负载的第一ldc、将第二输出电压提供给彼此并联连接的第二辅助电池和第二电负载的第二ldc以及改变第一ldc和第二ldc的输出电压的集成控制器,该控制方法包括:当确认第一ldc的故障时,通过第二ldc,根据集成控制器的控制,输出高于第二输出电压的第二增加输出电压;以及当确认第二ldc的故障时,通过第一ldc,根据集成控制器的控制,输出高于第一输出电压的第一增加输出电压。
14.集成电源的控制方法可以进一步包括:当第一ldc发生故障或第二ldc发生故障时,通过集成控制器,通过can通信向车辆控制单元或电子控制单元请求故障保护。
15.集成电源的控制方法可以进一步包括:在正常状态下,通过第二ldc,调节从第二ldc的输出端输出的第二输出电压的电流量,使得与从第一辅助电池和第二辅助电池之间的节点流到第二电负载的电流量相同,从而平衡第一辅助电池和第二辅助电池。
16.根据本公开的实施例,可以通过将现有ldc和beq集成为一个集成电源以减少设计成本、尺寸和重量,并可以稳定地向12v电负载和24v电负载供电并在故障保护时提高供电效率。
附图说明
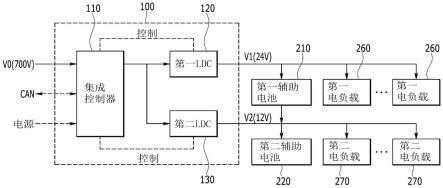
17.图1示出根据本公开实施例的车辆集成电源的框图。
18.图2是用于说明根据本公开的实施例的车辆集成电源中第一ldc发生故障时的操作的示图。
19.图3是用于说明根据本公开的实施例的车辆集成电源中第二ldc发生故障时的操作的示图。
20.图4示出根据本公开实施例的车辆集成电源的控制方法的流程图。
具体实施方式
21.下面将参照示出本公开实施例的附图对本公开的实施例进行更全面的描述。本领域技术人员将意识到,在不脱离本公开的思想或范围的情况下,可以以各种不同的方式修改所描述的实施例。
22.为了清楚地描述本公开,省略了与描述无关的部分,并且贯穿说明书的相同或相似的组成元件由相同的附图标记表示。
23.另外,除非明确地作出相反的描述,否则词语“包括”和诸如“包括有”或“包含”的变体将被理解为暗示包含所述元件但不排除任何其它元件。
24.图1示出根据本公开实施例的车辆集成电源的框图。
25.参照图1,车辆集成电源(integrated power supply)100包括集成控制器110、第一ldc120和第二ldc130。
26.集成控制器110可以从外部接收供应电源v0并将其传送到第一ldc120和第二ldc130。例如,集成控制器110可以从高压电池接收700v的供应电源v0并将其传送到第一ldc120和第二ldc130。
27.另外,集成控制器110可以通过接收电源进行操作,并可以通过控制器局域网(controller area network,can)与车辆控制单元(vehicle control unit,以下称为称vcu)或电子控制单元(electronic control unit,以下称为ecu)进行通信。当第一ldc120和第二ldc130发生故障时,集成控制器110可以通过can通信向vcu或ecu请求故障保护。
28.另外,集成控制器110可以控制第一ldc120和第二ldc130以改变第一ldc120和第二ldc130的输出电压。
29.第一ldc120可以将供应电源v0转换为第一输出电压v1并输出。例如,第一ldc120可以将700v的供应电源v0转换为24v的第一输出电压v1并输出。第一辅助电池210和一个或多个第一电负载260并联连接到第一ldc120的输出端,并且从第一ldc120输出的第一输出电压v1可以提供给第一辅助电池210和一个或多个第一电负载260。第一电负载260可以是将第一输出电压v1作为额定电压或标称电压的装置。
30.另外,第一ldc120可以根据集成控制器110的控制将700v的供应电源v0转换为稍后将在图3中描述的第一增加输出电压v1'并输出。即,第一ldc120可以根据集成控制器110的控制将第一输出电压v1改变为第一增加输出电压v1'并输出。
31.第二ldc130可以将供应电源v0转换为第二输出电压v2并输出。例如,第二ldc130可以将700v的供应电源v0转换为12v的第二输出电压v1并输出。第二辅助电池220和一个或多个第二电负载270并联连接到第二ldc130的输出端,并且从第二ldc130输出的第二输出电压v2可以提供给第二辅助电池220和一个或多个第二电负载270。第二电负载270可以是将第二输出电压v2作为额定电压或标称电压的装置。
32.另外,第二ldc130可以根据集成控制器110的控制将700v的供应电源v0转换为稍后将在图2中描述的第二增加输出电压v2'。即,第二ldc130可以根据集成控制器110的控制将第二输出电压v2改变为第二增加输出电压v2'并输出。
33.第一辅助电池210和第二辅助电池220可以串联连接,并且一个或多个第二电负载270可以连接到第一辅助电池210和第二辅助电池220之间的节点。第一辅助电池210和第二辅助电池220可以具有与第二输出电压v2相同的放电电压。
34.在正常状态下,第二ldc130可以根据集成控制器110的控制调节从第二ldc130的输出端输出的第二输出电压v2的电流量,使得与从第一辅助电池210和第二辅助电池220之间的节点流到一个或多个第二电负载270的电流量相同,从而可以平衡第一辅助电池210和第二辅助电池220。
35.当第一ldc120或第二ldc130发生故障时,集成控制器110控制第一ldc120或第二ldc130以改变第一ldc120或第二ldc130的输出电压,使得第一电负载260和第二电负载270正常操作,从而车辆可以稳定行驶。这将参照图2和图3进行描述。
36.图2是用于说明根据本公开的实施例的车辆集成电源中第一ldc发生故障时的操作的示图。
37.参照图2,当第一ldc120发生故障时,集成控制器110可以停止第一ldc120的操作,因此,可以阻断第一ldc120的输出。另外,集成控制器110控制第二ldc130,使得第二ldc130将供应电源v0转换为第二增加输出电压v2'并输出。第二增加输出电压v2'是比第二输出电压v2高的电压。例如,当第二输出电压v2为12v时,第二增加输出电压v2'可以为16v。
38.换言之,在正常状态下,第二ldc130可以作为电流控制操作以调节电流量以平衡
第一辅助电池210和第二辅助电池220,而当第一ldc120发生故障时,第二ldc130可以作为电压控制操作以输出第二增加输出电压v2'。
39.从第二ldc130输出的第二增加输出电压v2'被传送到第一辅助电池210,并且即使第一辅助电池210完全放电,由于电池的特性而维持2v至3v的输出电压,因此从第一辅助电池210提供给第一电负载260的第一辅助输出电压可以维持在18v到19v的水平。由于额定电压为24v的第一电负载260的操作范围约为16v到32v,因此即使在18v到19v的第一辅助输出电压下第一电负载260也可以正常操作。
40.另外,由于额定电压为12v的第二电负载270的操作范围约为8v至18v,因此第二电负载270可以在16v的第二增加输出电压v2'下正常操作。
41.然而,由于第二ldc130必须同时处理第一电负载260和第二电负载270,因此需要对电负载进行协同控制,为此,集成控制器110通过can通信向vcu或ecu请求故障保护,使得可以仅允许主要的电负载操作。
42.图3是用于说明根据本公开的实施例的车辆集成电源中当第二ldc发生故障时的操作的示图。
43.参照图3,当第二ldc130发生故障时,集成控制器110可以停止第二ldc130的操作,因此,可以阻断第二ldc130的输出。当第二ldc130发生故障时,由于第二ldc130没有提供第二输出电压v2,因此第一辅助电池210和第二辅助电池220之间的平衡被打破,因此第二辅助电池220完全放电,使得第二电负载270无法正常操作。为防止此问题,集成控制器110控制第一ldc120,使得第一ldc120将供应电源v0转换为第一增加输出电压v1'并输出。第一增加输出电压v1'是比第一输出电压v1高的电压。例如,当第一输出电压v1为24v时,第一增加输出电压v1'可以为32v。
44.当从第一ldc120输出的第一输出电压v1增加到第一增加输出电压v1'时,虽然不能完全防止第一辅助电池210和第二辅助电池220之间的平衡被打破,但因为充电到第一辅助电池210的电流量和从第一辅助电池210供应到第二辅助电池220的电流量可以增加,因此可以防止第二辅助电池220放电。因此,第二电负载270可以正常操作,并且车辆可以稳定地驱动。
45.即使在这种情况下,为了电负载的协同控制,集成控制器110也可以通过can通信向vcu或ecu请求故障保护,使得仅主要的电负载操作。
46.在下文中,将参照图4描述上述集成电源100的控制方法。
47.图4示出根据本公开实施例的车辆集成电源的控制方法的流程图。
48.参照图4,当车辆启动并且车辆可以被驱动时(s110),集成控制器110可以执行第一电压控制以使得第一ldc120输出第一输出电压v1并且可以执行电流控制以使得第二ldc130调节第二输出电压v2的电流量(s120)。
49.在车辆启动期间,集成控制器110可以重复执行检查第一ldc120是否发生故障的过程(s130)和检查第二ldc130是否发生故障的过程(s135)。
50.当确认第一ldc120的故障时,集成控制器110可以通过can通信将第一ldc120的故障发送到vcu(或ecu),并且可以向vcu(或ecu)请求故障保护功能,使得仅主要的电负载操作(s140)。另外,集成控制器110可以将第二ldc130的电流控制改变为电压控制,使得第二ldc130可以输出第二增加输出电压v2'(s150)。第二ldc130可以将输出电压增加到第二增
加输出电压v2'并维持(s160)。第二ldc130输出的第二增加输出电压v2'被传送到第一辅助电池210,将在第一电负载260操作范围内的第一辅助输出电压从第一辅助电池210提供给第一电负载260,使得第一电负载260可以正常操作。
51.当确认第二ldc130的故障时,集成控制器110可以通过can通信将第二ldc130的故障发送到vcu(或ecu),并可以向vcu(或ecu)请求故障保护功能,使得仅主要的电负载操作(s145)。另外,集成控制器110控制第一ldc120,使得第一ldc120将第一输出电压v1改变为第一增加输出电压v1'并输出(s155)。当从第一ldc120输出的第一输出电压v1增加到第一增加输出电压v1'时,充电到第一辅助电池210的电流量和从第一辅助电池210提供给第二辅助电池220的电流量可以增加。因此,可以防止第二辅助电池220放电,并且第二电负载270可以正常操作。
52.当第一ldc120发生故障时,第二ldc130必须同时管理第一电负载260和第二电负载270,并且当第二ldc130发生故障时,第一ldc120必须同时管理第一电负载260和第二电负载270,使得vcu(或ecu)可以根据来自集成控制器110的故障保护请求允许车辆以跛行回家(limp-home)模式行驶(s170)。
53.集成控制器110可以包括处理器或微处理器。另外,集成控制器110还可以包括存储器。集成控制器110的前述操作/功能可以实现为存储在可以包括非暂时性计算机可读记录介质的存储器上的计算机可读代码/算法/软件。非暂时性计算机可读记录介质是可以存储由处理器或微处理器读取的数据的任何数据存储装置。计算机可读记录介质的示例包括硬盘驱动器(hdd)、固态驱动器(ssd)、硅盘驱动器(sdd)、只读存储器(rom)、随机存取存储器(ram)、cd-rom、磁带、软盘、光学数据存储装置等。处理器或微处理器可以通过执行存储在非暂时性计算机可读记录介质上的计算机可读代码/算法/软件来执行集成控制器110的上述操作/功能。
54.虽然结合目前被认为是可实践实施例的内容描述了本公开,但是应当理解的是,本公开不限于所公开的实施例,而是相反,旨在涵盖包括在所附权利要求书的思想和范围内的各种修改和等同布置。因此,本领域技术人员将理解的是,本公开的各种修改和其它等同实施例是可能的。因此,本公开真正的技术保护范围必须基于所附权利要求书的技术思想来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1