轮胎与路面摩擦力在线快速估计方法
1.本发明属于自动控制、信息技术和先进制造领域,具体涉及针对轮胎路面摩擦力的快速估计问题。
背景技术:
2.车辆在道路上的操纵行为主要是由轮胎-路面界面上的摩擦力决定的。汽车控制系统,特别是主动安全控制系统,如防抱死控制系统、牵引力控制系统和车辆稳定性控制系统,都需要获取轮胎-地面摩擦力信息,以确保安全稳定的车辆运动。
3.然而,由于轮胎-路面具有高度非线性且依赖于许多不可控的环境因素,如温度、轮胎磨损、法向力、轮胎压力和路面条件等,很难直接测量,估计轮胎-路面摩擦力具有挑战性。尤其是在实时工况下,轮胎与路面接触的瞬态特性进一步增加了路面摩擦估计的复杂性。
4.通常有两类方法来实现轮胎与路面摩擦力的估计,一类是基于传感器的方法,如gps、光学传感器等,然而这些传感器价格昂贵,实际应用困难。另一类方法主要是采用卡尔曼滤波、最小二乘法等估计方法,然而这类估计方法主要是基于线性化轮胎模型,造成估计不准确,同时,这类方法在估计过程中没有考虑参数误差信息,收敛速度无法保证。
技术实现要素:
5.本发明的目的在于提供一种轮胎与路面摩擦力在线快速估计方法,低成本实现在线自适应估计,确保估计误差快速收敛到零,估计速度较快。
6.为实现上述目的,本发明提供了一种轮胎与路面摩擦力在线快速估计方法,用于机动车车辆,车辆具有车载ecu以及与车载ecu相连接的车速传感器、abs系统和驱动系统,车辆行驶过程中abs系统向车载ecu提供实时的车轮滑移率s;车辆行驶过程中车载ecu由驱动系统获得驱动力fd,驱动力fd的单位为n;
7.ecu内存储着由车辆厂家确定的车辆质量数据、车辆的风阻系数、摩擦力辨识参数θ的估计值的初值、车速估计参数的初值、估计增益k、在线自适应估计律常数η3以及试凑得到的滤波常数η1和η2;
8.本发明按以下步骤进行:
9.第一步骤是构建基础方程并存储于车载ecu中;
10.基础方程包括公式一至公式十;
11.公式一是车辆行驶动力学方程:
[0012][0013]
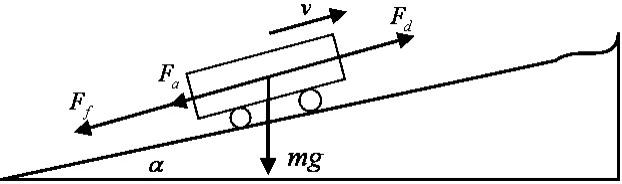
公式一中,m为车辆质量并由车载ecu获取,其单位为千克,v为车辆速度并由车速传感器获取,fd为车载ecu由车辆的驱动系统获得的驱动力,ff为公式十计算得到的轮胎路面摩擦力,fa=cav2为风阻力,ca为风阻系数并由车载ecu获取;α为坡度角,单位为度,sinα为坡度角的正弦函数值;g是重力加速度,单位是米/秒平方;
[0014]
公式二是连续可微摩擦力模型:
[0015]ff
=b1tanh(b2s)-b3tanh(b4s)+b5tanh(b6s)+b7s;
[0016]
其中,ff是轮胎与地面间的摩擦力;公式二为连续可微摩擦力模型,b1,b2,b3,b4,b5,b6和b7为所述连续可微摩擦力模型中的常数系数,s为轮胎滑移率,tanh为数学上的正切函数;
[0017]
公式二中,b2,b4,b6由魔术公式通过曲线拟合得到;
[0018]
b1,b3,b5,b7通过公式三计算得到,将公式二代入公式一得到公式三,公式三为在线估计律:
[0019][0020]
公式三中,s是车轮的滑移率,由abs系统获得;
[0021]
将公式三变换为公式四:
[0022]
公式四中,θ是摩擦力辨识参数,
[0023]
且θ由公式九得到其估计值;
[0024]
公式四中,ψ=[-tanh(b2s),tanh(b4s),-tanh(b6s),-s,-g];g是重力加速度,单位是米/秒平方;
[0025]
公式五是第一滤波变量公式:
[0026][0027]
公式五中,η1为试凑得到的滤波常数并存储于车载ecu中,vf为v的滤波变量;ψf为ψ的滤波变量;v是车辆速度并由车速传感器获取;通过求解公式五中的第一等式得到vf;通过求解公式五中的第二等式得到在公式七中使用的参数ψf;
[0028]
公式六是第二滤波变量公式:
[0029][0030]
公式六中,η2和η1均为试凑得到的滤波常数并预先存储于车载ecu中,vf通过求解公式五中的第一等式得到;ψ通过公式四中的表达式ψ=[-tanh(b2s),tanh(b4s),-tanh(b6s),-s,-g]计算得到;g和h为辅助滤波变量,通过公式六计算得到g和h的值;
[0031]
公式七是:公式七中,w是在线自适应估计律辅助变量;
[0032]
是摩擦力辨识参数θ的估计值,在车载ecu打开、车辆行驶后首次计算时,参数由车载ecu获取初值;首次计算之后的递归计算中,公式七中的参数的值由上一计算循环中公式九计算得到;
[0033]
公式八是:
[0034]
公式八中,k为试凑得到的估计增益并预存在车载ecu中;e为估计误差,
在车载ecu打开、车辆行驶后首次计算公式八时,取存储在车载ecu中的初值;首次计算之后的递归计算中,取上一计算循环中通过公式八计算得到的值;在车载ecu打开、车辆行驶后首次计算时,参数由车载ecu获取初值;首次计算之后的递归计算中,公式八中的参数的值由上一计算循环中公式九计算得到;
[0035]
公式九是:
[0036]
公式九中,η3为在线自适应估计律常数,通过试凑法得到并预先存储在车载ecu中;
[0037]
通过计算得到b1,b3,b5,b7的估计值使用b1,b3,b5,b7的估计值代替公式2中的b1,b3,b5,b7后即得公式十;
[0038]
公式十是:ff为轮胎与路面的摩擦力;
[0039]
第二步骤:
[0040]
在车辆的行驶过程中,车载ecu按如下子步骤在线估计轮胎与路面的摩擦力ff值;
[0041]
第一子步骤是:
[0042]
车载ecu第一通过公式四计算得到ψ值作为公式六的计算基础;通过公式五计算得到vf值和ψf值作为公式六的计算基础;
[0043]
第二子步骤是:车载ecu通过公式六计算得到辅助滤波变量g和h的值并作为公式七的计算基础;
[0044]
第三子步骤是:车载ecu通过公式七计算得到w的值并作为公式九的计算基础;
[0045]
第四子步骤是:车载ecu通过公式九计算得到摩擦力辨识参数的估计值进而计算出b1,b3,b5,b7的估计值并作为公式十的计算基础;
[0046]
第五子步骤是:通过公式十计算得到当前计算循环下轮胎与路面的摩擦力ff;
[0047]
第一子步骤至第五子步骤构成一个计算循环,将上一计算循环中得到的的值,作为下一计算循环中公式四、公式七和公式八中的值;重复进行第一子步骤至第五子步骤构成的计算循环,进行循环递归计算,从而在机动车的行驶过程中对轮胎与路面摩擦力进行实时在线估计。
[0048]
在循环递归计算的每一计算循环中,通过公式八计算出的值并与公式九计算得到的进行比较,令公式八计算出的的值与公式九计算得到的的值的差值为如果循环递归计算超过20次后,则车载ecu发出出错警报。
[0049]
本发明具有如下的优点:
[0050]
本发明的估计方法计算量小,计算速度快,循环递归计算中误差收敛速度快,结果准确,实用性强。
[0051]
本发明仅仅依赖车速传感器和abs系统提供实时车速和实时车轮滑移率即可进行计算,由于车速传感器和abs系统基本为车辆的必备部件,因此采用本发明,不需要额外增加配件成本,只需要将算法写入车载ecu即可实现轮胎与路面摩擦力的在线快速估计,因而
实现成本极低,具有非常高的推广应用价值。
[0052]
本发明通过公式八对计算过程进行校验,保证误差在各种情况下均能快速收敛到零值附近,如不能快速收敛到零值附近则进行报警,由设计人员调整各参数初值后再次试验。本发明的各计算公式能够保证循环递归计算中误差的收敛速度,公式八起到验证和警示的作用。同时,误差能够快速收敛也表明本发明的估计方法的有效性。
附图说明
[0053]
图1是公式一的原理示意图;
[0054]
图2是本发明应用于客车上的实验结果图。
[0055]
图二中,实际摩擦力用实线表示,估计值用虚线表示。
具体实施方式
[0056]
结合附图1和附图2,本发明提出了一种轮胎与路面摩擦力在线快速估计方法,用于机动车车辆,车辆具有车载ecu以及与车载ecu相连接的车速传感器、abs系统和驱动系统,车辆行驶过程中abs系统向车载ecu提供实时的车轮滑移率s;车辆行驶过程中车载ecu由驱动系统获得驱动力fd,驱动力fd的单位为n(牛);
[0057]
ecu内存储有由车辆厂家确定的车辆质量数据、车辆的风阻系数、摩擦力辨识参数θ的估计值的初值和车速估计参数的初值(和的初值均为趋近于0的正常数,均小于0.01即可,由设计人员确定;本发明中的算法经递归计算得到的轮胎与路面摩擦力的数值对和的初值不敏感)、的初值、估计增益k、在线自适应估计律常数η3以及试凑得到的滤波常数η1和η2;
[0058]
本发明的轮胎与路面摩擦力在线快速估计方法按以下步骤进行:
[0059]
第一步骤是构建基础方程并存储于车载ecu中;
[0060]
基础方程包括公式一至公式十;
[0061]
公式一是车辆行驶动力学方程:
[0062][0063]
公式一中,m为车辆质量并由车载ecu获取,其单位为千克,v为车辆速度并由车速传感器获取,fd为车载ecu由车辆的驱动系统获得的驱动力,ff为公式十计算得到的轮胎路面摩擦力,fa=cav2为风阻力,ca为风阻系数并由车载ecu获取;α为坡度角,单位为度,sinα为坡度角的正弦函数值;坡度角α由与车载ecu相连接并装在车身上的倾角传感器获得,也可由与车载ecu相连的gps模块获得,也可由观测器算法获得,获取坡度角为常规技术,不详述。g是重力加速度,单位是米/秒平方;
[0064]
公式二是连续可微摩擦力模型:
[0065]ff
=b1tanh(b2s)-b3tanh(b4s)+b5tanh(b6s)+b7s;
[0066]
其中,ff是轮胎与地面间的摩擦力;ff很难直接通过传感器测量,通常的做法是通过常用的魔术公式来计算摩擦力,但是由于魔术公式中的相关参数值只能通过离线实验数据获得,不能跟随行车工况实现在线更新,因此不能实现在线实时估计摩擦力。为此,本发明提出了如公式二所示的新的连续可微摩擦力模型;公式二为连续可微摩擦力模型,b1,
b2,b3,b4,b5,b6和b7为所述连续可微摩擦力模型中的常数系数,s为轮胎滑移率,tanh为数学上的正切函数;
[0067]
公式二中,b2,b4,b6由魔术公式通过曲线拟合得到;魔术公式为公知公式,不赘述。
[0068]
b1,b3,b5,b7通过公式三计算得到,将公式二代入公式一得到公式三,公式三为在线估计律:
[0069][0070]
公式三中,s是车轮的滑移率,由abs系统获得;
[0071]
将公式三变换为公式四:
[0072]
公式四中,θ是摩擦力辨识参数,
[0073]
且θ由公式九得到其估计值;
[0074]
公式四中,ψ=[-tanh(b2s),tanh(b4s),-tanh(b6s),-s,-g];g是重力加速度,单位是米/秒平方;
[0075]
公式五是第一滤波变量公式:
[0076][0077]
公式五中,η1为试凑得到的滤波常数并存储于车载ecu中,vf为v的滤波变量;ψf为ψ的滤波变量;v是车辆速度并由车速传感器获取;通过求解公式五中的第一等式得到vf;通过求解公式五中的第二等式得到在公式七中使用的参数ψf;
[0078]
公式六是第二滤波变量公式:
[0079][0080]
公式六中,η2和η1均为试凑得到的滤波常数并预先存储于车载ecu中,vf通过求解公式五中的第一等式得到;ψ通过公式四中的表达式ψ=[-tanh(b2s),tanh(b4s),-tanh(b6s),-s,-g]计算得到;g和h为辅助滤波变量,通过公式六计算得到g和h的值;
[0081]
公式七是:公式七中,w是在线自适应估计律辅助变量;
[0082]
是摩擦力辨识参数θ的估计值,在车载ecu打开、车辆行驶后首次计算时,参数由车载ecu获取初值;首次计算之后的递归计算中,公式七中的参数的值由上一计算循环中公式九计算得到;
[0083]
公式八是:
[0084]
公式八中,k为试凑得到的估计增益并预存在车载ecu中;e为估计误差,在车载ecu打开、车辆行驶后首次计算公式八时,取存储在车载ecu中的初值;首次计算之后的递归计算中,取上一计算循环中通过公式八计算得到的值;在车载ecu打开、车辆行驶后首次计算时,参数由车载ecu获取初值;首次计算之后的递归计算中,公式八中的参
数的值由上一计算循环中公式九计算得到;
[0085]
公式九是:
[0086]
公式九中,η3为在线自适应估计律常数,通过试凑法得到并预先存储在车载ecu中;
[0087]
通过计算得到b1,b3,b5,b7的估计值使用b1,b3,b5,b7的估计值代替公式2中的b1,b3,b5,b7后即得公式十;
[0088]
公式十是:ff为轮胎与路面的摩擦力;
[0089]
第二步骤:
[0090]
在车辆的行驶过程中,车载ecu按如下子步骤在线估计轮胎与路面的摩擦力ff值;
[0091]
第一子步骤是:
[0092]
车载ecu第一通过公式四计算得到ψ值作为公式六的计算基础;通过公式五计算得到vf值和ψf值作为公式六的计算基础;
[0093]
第二子步骤是:车载ecu通过公式六计算得到辅助滤波变量g和h的值并作为公式七的计算基础;
[0094]
第三子步骤是:车载ecu通过公式七计算得到w的值并作为公式九的计算基础;
[0095]
第四子步骤是:车载ecu通过公式九计算得到摩擦力辨识参数的估计值进而计算出b1,b3,b5,b7的估计值并作为公式十的计算基础;
[0096]
第五子步骤是:通过公式十计算得到当前计算循环下轮胎与路面的摩擦力ff;
[0097]
第一子步骤至第五子步骤构成一个计算循环,将上一计算循环中得到的的值,作为下一计算循环中公式四、公式七和公式八中的值;重复进行第一子步骤至第五子步骤构成的计算循环,进行循环递归计算,从而在机动车的行驶过程中对轮胎与路面摩擦力进行实时在线估计。
[0098]
本发明的估计方法计算量小,计算速度快,循环递归计算中误差收敛速度快,结果准确,实用性强。
[0099]
本发明仅仅依赖车速传感器和abs系统提供实时车速和实时车轮滑移率即可进行计算,由于车速传感器和abs系统基本为车辆的必备部件,因此采用本发明,不需要额外增加配件成本,只需要将算法写入车载ecu即可实现轮胎与路面摩擦力的在线快速估计,因而实现成本极低,具有非常高的推广应用价值。
[0100]
在循环递归计算的每一计算循环中,通过公式八计算出的值并与公式九计算得到的进行比较,令公式八计算出的的值与公式九计算得到的的值的差值为如果循环递归计算超过20次后,则车载ecu发出出错警报。
[0101]
本发明通过公式八对计算过程进行校验,保证误差在各种情况下均能快速收敛到零值附近,如不能快速收敛到零值附近则进行报警,由设计人员调整各参数初值后再次试验。本发明的各计算公式能够保证循环递归计算中误差的收敛速度,公式八起到验证和警
示的作用。同时,误差能够快速收敛也表明本发明的估计方法的有效性。
[0102]
采用本发明对某客车进行测试验证。在车速为20km/h(千米/小时)的直行工况下驱动轮的摩擦力估计结果如图2所示。
[0103]
通过控制结果可以看出,本发明所提出的方法可以准确快速地实现轮胎与路面摩擦力的在线快速估计。
[0104]
以上实施例仅用以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应当理解:依然可以对本发明进行修改或者等同替换,而不脱离本发明的精神和范围的任何修改或局部替换,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1