一种主动减振的能量收集与车辆故障监测系统
1.本发明属于微能量收集技术领域,具体涉及一种主动减振的能量收集与车辆故障监测系统。
背景技术:
2.随着社会技术的不断进步,汽车、火车、地铁等交通工具不断被投放到人们的日常生活中。然而由于地面设施的不平整或车辆启动、加速过程中产生的振动只能转变为热量散发到空气中。另一方面,随着传感器数量与日俱增,线路变得非常复杂、维护也变得很困难,甚至有一些特殊的检测传感器不能直接采取车载电池连线供电。如果可以合理利用车辆的振动能量,既能提高能量利用率,为传感器供电,简化线路,又可以提高乘坐的舒适性,甚至可以避开难以施加监测系统的悬挂系统,而直接根据车辆振动信号产生电能的变化规律来实时监测车辆是否出现故障。
技术实现要素:
3.本发明的目的是面对车辆悬挂系统产生的振动能量,提供一种主动减振的能量收集与车辆故障监测系统,收集车辆的振动能量,同时利用车辆的振动能量来监测车辆是否出现故障。
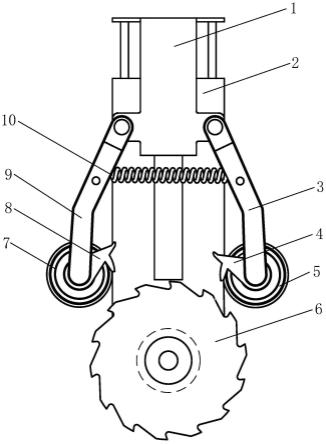
4.本发明一种主动减振的能量收集与车辆故障监测系统,包括上压板、下滑槽、左翼支撑板、左棘爪、左扭簧盘、右翼支撑板、右棘爪、右扭簧盘、棘轮、平衡弹簧、微型发电机和监测系统;所述的上压板上固定有滑杆,所述的滑杆与下滑槽的顶部构成滑动副;滑杆上套置有减振弹簧,减振弹簧两端分别与上压板和下滑槽固定;所述左翼支撑板和右翼支撑板的一端与下滑槽两侧分别铰接;左翼支撑板另一端与左扭簧盘固定,并与左棘爪铰接;右翼支撑板另一端与右扭簧盘固定,并与右棘爪铰接;左扭簧套置在左扭簧盘上,一端与左扭簧盘固定,另一端与左棘爪固定;右扭簧套置在右扭簧盘上,一端与右扭簧盘固定,另一端与右棘爪固定;左棘爪和右棘爪上均设有一体成型的上斜爪指和下斜爪指;所述的棘轮固定在微型发电机的输入轴上,并位于左棘爪和右棘爪下方对中位置处;微型发电机的底座固定在下滑槽底部;左翼支撑板和右翼支撑板的中部均固定有挂杆,所述平衡弹簧的两端分别挂在左翼支撑板和右翼支撑板中部的挂杆上;所述微型发电机的电能输出端接储能电池;所述的监测系统采集微型发电机输出的电信号,并对车辆故障进行监测和分析。
5.优选地,所述的监测系统包括能量采集模块、后台监测模块和报警模块;所述的能量采集模块接收微型发电机的导线线圈传输出的电信号,并传给后台监测模块;所述的后台监测模块将电信号中各个幅值与存储的车辆正常行驶时导线线圈传输出的电信号幅值进行对比,记录电信号中幅值超过车辆正常行驶时导线线圈传输出的电信号幅值的频率,并判断频率是否超过预设值,若超过预设值,则判定出现故障,并通过报警模块报警。
6.优选地,车辆正常行驶时导线线圈传输出的电信号幅值计算过程如下:
7.单个车轮悬挂系统的双质量动力学模型运动微分方程为:
[0008][0009]
其中,m1为车轮质量,m2为车身质量,k1为车轮竖直方向刚度,k2为悬架竖直方向刚度,c2为悬架阻尼系数,q为激励,x1为车轮的竖直方向位移,x2为车身的竖直方向位移,为x1的一次导数,为x2的一次导数,为x1的二次导数,为x2的二次导数。
[0010]
在单个车轮悬挂系统的振动还没经过阻尼过滤前且只考虑车身振动情况下,来求解单个车轮悬挂系统的单自由度无阻尼自由振动的振动固有频率,具体过程如下:
[0011]
无阻尼自由振动时单个车轮悬挂系统的运动方程为:
[0012][0013]
只考虑车身振动情况下,即车轮不动,得:
[0014][0015]
单个车轮悬挂系统的单自由度无阻尼自由振动的振动固有频率为固定频率对应的固定周期为
[0016]
由于棘轮只在前半个周期0.5t内旋转,则棘轮旋转周期内的位移总和s为单个车轮悬挂系统在一个周期t内位移总和的一半,表达式如下:
[0017][0018]
又由于其中,w为棘轮旋转的角速度,l为棘轮的旋转半径,则得:
[0019][0020]
化简得
[0021]
微型发电机的导体线圈与棘轮同步转动,在电磁感应作用下,微型发电机内的导体线圈在匀强磁场中做切割磁感线运动,磁通量变化表达式为:
[0022][0023]
其中,φ0为t0时刻经过导体线圈的磁通量,φ为t时刻经过导体线圈的磁通量,b为
磁场强度,s为导体线圈面积,θ0为t0时刻导体线圈与磁场方向的初始夹角,θ为t时刻导体线圈与磁场方向的夹角,
△
t为t时刻与t0时刻的时间差。
[0024]
当时间
△
t很小时,感应电动势近似表示为如下形式:
[0025][0026]
由于时间
△
t很小,感应电动势进一步近似表示为:
[0027][0028]
则感应电动势的峰值为将此峰值作为车辆正常行驶时导线线圈传输出的电信号幅值。
[0029]
本发明具有的有益效果是:
[0030]
1、将车辆整车悬挂系统产生的振动能量转化为电能进行储存和利用,解决车身上难以连线到车载电池的特殊传感器的供能问题。
[0031]
2、采取左、右棘爪与棘轮啮合的结构方式将往复的直线转化为单向的旋转,且左、右棘爪均能带动棘轮同个方向转动,使得本发明在车辆整车悬挂系统振动的半个周期内均能够采集振动能量,能量转换率高。
[0032]
3、采取上压板、滑杆与下滑槽的结构,并且在滑杆上设置减振弹簧,对棘轮的转动具有主动减振作用,保证输出运动的平稳性,可以提供更稳定的输出电压以及功率,并且在振动返程时有很好的助力效果。
[0033]
4、在收集车辆整车悬挂系统的振动能量的同时监测微型发电机的导线线圈传输出的电信号,可以很好地判断悬架竖直方向刚度是否出现故障,并且避开在难以施加监测系统的悬挂系统处进行故障检测。
附图说明
[0034]
图1为本发明在未受到激励时的二维结构示意图;
[0035]
图2为图1的右视图;
[0036]
图3为本发明在未受到激励时的结构立体图;
[0037]
图4为本发明受到激励作用且左、右棘爪运动到距离最大时的二维结构示意图;
[0038]
图5为本发明中左翼支撑板、左棘爪和左扭簧盘的结构立体图;
[0039]
图6为本发明中微型发电机和监测系统的工作原理图;
[0040]
图7为车身和车轮组成的双质量动力学模型。
具体实施方式
[0041]
以下结合附图对本发明作进一步说明。
[0042]
如图1、2、3、4和5所示,一种主动减振的能量收集与车辆故障监测系统,包括上压板1、下滑槽2、左翼支撑板3、左棘爪4、左扭簧盘5、右翼支撑板9、右棘爪8、右扭簧盘7、棘轮6、平衡弹簧10、微型发电机12和监测系统;上压板1上固定有滑杆11,滑杆11与下滑槽2的顶
部构成滑动副;滑杆11上套置有减振弹簧,减振弹簧两端分别与上压板1和下滑槽2固定,保证传递过程中运动的平稳性以及主动减振的效果;左翼支撑板3和右翼支撑板9的一端与下滑槽2两侧分别铰接;左翼支撑板3另一端与左扭簧盘5固定,并与左棘爪4铰接;右翼支撑板9另一端与右扭簧盘7固定,并与右棘爪8铰接;左扭簧套置在左扭簧盘5上,一端与左扭簧盘5固定,另一端与左棘爪4固定;右扭簧套置在右扭簧盘7上,一端与右扭簧盘7固定,另一端与右棘爪8固定;左棘爪4和右棘爪8上均设有一体成型的上斜爪指和下斜爪指;棘轮6固定在微型发电机12的输入轴上,并位于左棘爪4和右棘爪8下方对中位置处;微型发电机12的底座固定在下滑槽2底部;左翼支撑板3和右翼支撑板9的中部均固定有挂杆,平衡弹簧10两端分别挂在左翼支撑板3和右翼支撑板9中部的挂杆上。平衡弹簧10来牵制左、右翼支撑板的对中性,使得左棘爪4和右棘爪8运动过程中在平衡弹簧10的约束下一直与棘轮是相互啮合的,不会出现其中一个棘爪被排挤走的情况,并且减小左棘爪4和右棘爪8与棘轮啮合时的间隙,而左扭簧和右扭簧能进一步减小左棘爪4和右棘爪8与棘轮啮合时的间隙。微型发电机12的电能输出端接储能电池,储能电池存储的电能可为传感器供电;监测系统采集微型发电机12输出的电信号,并对车辆故障进行监测和分析。
[0043]
作为一个优选实施例,监测系统包括能量采集模块、后台监测模块和报警模块;能量采集模块接收微型发电机12的导线线圈传输出的电信号,并传给后台监测模块;后台监测模块将电信号中各个幅值与存储的车辆正常行驶时导线线圈传输出的电信号幅值进行对比,记录电信号中幅值超过车辆正常行驶时导线线圈传输出的电信号幅值的频率,并判断频率是否超过预设值,若超过预设值,则判定出现故障,并通过报警模块报警。
[0044]
作为一个优选实施例,车辆正常行驶时导线线圈传输出的电信号幅值计算过程如下:
[0045]
由于车辆整车悬挂系统循环振动的过程中,各前、后车轮的悬挂系统垂直振动几乎是独立的,因此可以针对单个车轮悬挂系统来建立动力学模型;单个车轮悬挂系统又可以简化为由车身和车轮组成的双质量动力学模型,如图7所示,这个系统模型可以很好反映车身以及车轮部分产生振动的动态特性,可以用于监测车辆是否出现故障。
[0046]
单个车轮悬挂系统的双质量动力学模型运动微分方程为:
[0047][0048]
其中,m1为车轮质量,m2为车身质量,k1为车轮竖直方向刚度,k2为悬架竖直方向刚度,c2为悬架阻尼系数,q为激励,x1为车轮的竖直方向位移,x2为车身的竖直方向位移,为x1的一次导数,为x2的一次导数,为x1的二次导数,为x2的二次导数。
[0049]
在单个车轮悬挂系统的振动还没经过阻尼过滤前且只考虑车身振动情况下,来求解单个车轮悬挂系统的单自由度无阻尼自由振动的振动固有频率,具体过程如下:
[0050]
无阻尼自由振动时单个车轮悬挂系统的运动方程为:
[0051][0052]
只考虑车身振动情况下,即车轮不动,得:
[0053]
[0054]
单个车轮悬挂系统的单自由度无阻尼自由振动的振动固有频率为固定频率对应的固定周期为
[0055]
因此,只考虑车身振动情况下,单个车轮悬挂系统在受到外界激励后且振动还没经过阻尼过滤前产生的位移随时间t按正弦规律变化,该位移传递到上压板时带动上压板做等频率振动,继续传递到棘轮与左棘爪4和右棘爪8啮合后,振动频率发生改变。
[0056]
由于棘轮只在前半个周期0.5t内旋转,则棘轮旋转周期内的位移总和s为单个车轮悬挂系统在一个周期t内位移总和的一半,表达式如下:
[0057][0058]
又由于其中,w为棘轮旋转的角速度,l为棘轮的旋转半径,则得:
[0059][0060]
化简得
[0061]
微型发电机12的导体线圈与棘轮同步转动,在电磁感应作用下,微型发电机12内的导体线圈在匀强磁场(由正对且极性相反设置的磁铁一13和磁铁二15产生)中做切割磁感线运动,磁通量变化表达式为:
[0062][0063]
其中,φ0为t0时刻经过导体线圈的磁通量,φ为t时刻经过导体线圈的磁通量,b为磁场强度,s为导体线圈面积,θ0为t0时刻导体线圈与磁场方向的初始夹角,θ为t时刻导体线圈与磁场方向的夹角,
△
t为t时刻与t0时刻的时间差。
[0064]
由于感应电动势的大小与磁通量的变化量成正比,与发生该磁通量变化的时间成反比,当时间
△
t很小时,感应电动势近似表示为如下形式:
[0065][0066]
由于时间
△
t很小,感应电动势进一步近似表示为:
[0067][0068]
则感应电动势的峰值为将此峰值作为车辆正常行驶时导线线圈传输出的电信号幅值。
[0069]
若监测系统判断出微型发电机12的导线线圈传输出的电信号中幅值超过的频率超过预设值,肯定是悬架竖直方向刚度k2出现故障,应及时报警排除隐患。
[0070]
该主动减振的能量收集与车辆故障监测系统,工作原理如下:
[0071]
将下滑槽2固定在车辆的悬架上,上压板1固定在车身上;上压板1接收来自车辆整车悬挂系统的振动能量做往复运动,推动两侧的左棘爪4和右棘爪8运动,进而使得左棘爪4和右棘爪8带动棘轮做旋转运动,该过程中,平衡弹簧、连接左棘爪4的左扭簧和连接右棘爪8的右扭簧不断调整弹性力来调整左棘爪4和右棘爪8的角度,保证左棘爪4和右棘爪8始终与棘轮紧密接触;棘轮做旋转运动促使微型发电机12将车辆振动能量转化为电能存储到储能电池内并为传感器供电,同时微型发电机12的电信号流经监测系统,监测系统对车辆故障进行监测和分析。其中,上压板做进程运动时,左棘爪4推动棘轮旋转,左、右棘爪之间的距离慢慢变大直到最大值,然后再缩小,导体线圈14内部产生的电流由导体线圈14依次经换向器一17、电刷、电子元器件(传感器)、监测系统、电刷和换向器二18流回导体线圈14形成回路,两个电刷分别记为电刷一16和电刷二19,两个电刷交替与换向器一17和换向器二18接触,如图6所示;外界激励消失后,上压板在减振弹簧、平衡弹簧、连接左棘爪4的左扭簧和连接右棘爪8的右扭簧回复力作用下做返程运动,右棘爪8推动棘轮转动,左、右棘爪之间的距离慢慢变大直到最大值,然后再缩小,导体线圈14内部产生的电流方向与左棘爪4推动棘轮旋转时电流方向相同。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1