一种用于混合交通流拥堵工况的智能车辆控制方法
1.本发明涉及汽车技术控制策略领域,特别是涉及一种用于混合交通流拥堵工况的智能车辆控制策略与方法。
背景技术:
2.随着中国汽车保有量也快速的增加,驾驶员不良好的驾驶习惯在交通拥堵中造成了大量的事故。特别是夹塞变道所造成的事故,占中国发生交通事故总数的比例很高。目前,针对城市拥堵工况下的夹塞变道策略,还没有引起广泛的重视和应用,而且将来在有人驾驶和无人驾驶这样的混合交通系统中,如何避免夹塞变道,也是非常有必要的;它不仅仅可以提高行车安全,还有助于维持正常的车流,提高车流的前进速度,避免频繁的加减速,提高驾驶舒适性和经济型。
技术实现要素:
3.本发明针对以上问题,提出了一种用于混合交通流拥堵工况的智能车辆控制方法,通过在交通拥堵路段实施相应的控制策略,采取缩小跟车距离或者加速局部绕道超车逼回夹塞车辆的控制策略来防止自车被夹塞,或采取紧急减速的策略避免碰撞。
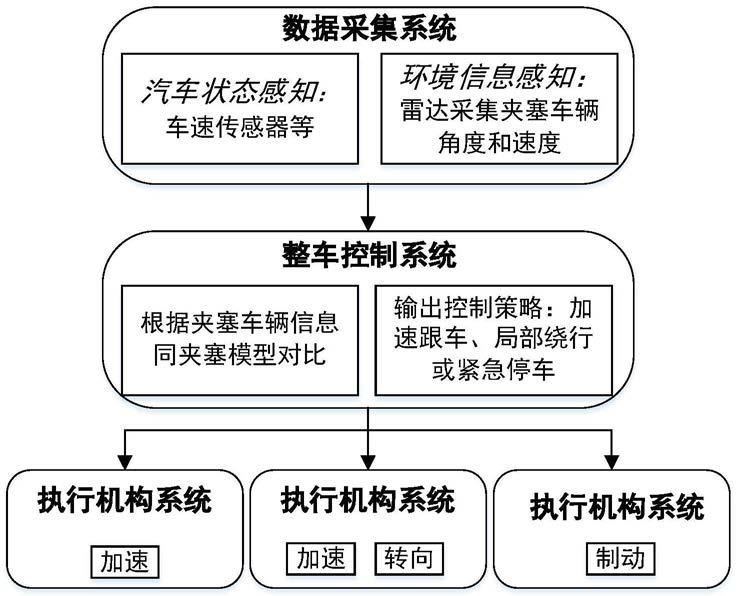
4.本发明的技术方案为:通过数据采集系统采集汽车在行驶过程中的环境信息和汽车状态信息,将采集到的环境信息和汽车状态信息输入到整车控制系统中并与夹塞模型对比判断是否存在夹塞车辆;
5.若没有夹塞车辆,则继续跟车行驶;若存在夹塞车辆,则在选择策略之后,将选择的策略发送至执行机构系统执行加速缩小跟车距离、局部绕行跟车或者是紧急减速的策略,然后再重新跟车行驶。
6.所述数据采集系统用于采集汽车在行驶过程中的环境信息和汽车状态信息,并输入到整车控制系统中;
7.所述整车控制系统用于接收数据采集系统的数据并同夹塞模型对比,并将决策输出到执行机构系统中;
8.所述执行机构系统用于接收控制系统的信息输入完成操纵任务,实现加速缩小跟车距离或者局部绕行跟车,亦或是紧急停车。
9.所述的数据采集系统为车载传感器系统,包括环境感知系统以及车辆状态感知系统;
10.所述环境感知系统包括置于汽车的两侧的雷达传感器,用于采集相邻车道行驶车辆的速度信息和和行驶角度信息;
11.所述车辆状态感知系统包括方向盘转角传感器、车速传感器、陀螺仪、横向加速度传感器、侧向加速度传感器、横摆角速度传感器,用于采集汽车行驶时的汽车状态信息;其中方向盘转角传感器置于方向盘下方,用于采集方向盘转角信息;四个车速传感器置于车轮的输出端,用于采集车速信息;其余传感器置于车内用于采集包括横向加速度、侧向加速
度、横摆角速度、航向角在内的信息。
12.所述执行机构系统包括纵向控制器和横向控制器,其中,纵向控制器由制动执行器、速度执行器组成,横向控制器由转向执行器组成。
13.本案包括以下步骤;
14.步骤1:利用数据采集系统采集汽车正常行驶中的汽车状态信息和环境信息;
15.步骤2:整车控制系统通过夹塞模型判断是否有夹塞车辆,判断逻辑为:
16.a
y2
》0.7m/s2或y2》l1/2
17.其中,a
y2
为夹塞车向自车靠近的加速度,y2为夹塞车偏离原始车道中心线的量,l1为车辆边缘与车道线的距离,两者通过毫米波雷达测得;若没有夹塞车辆,则执行步骤7;若存在夹塞车辆,则在选择策略之后,执行步骤3;
18.步骤3:执行系统接收到整车控制系统的信号,若接收的策略为加速缩小车距,则执行步骤4;若接收的策略为局部绕行,则执行步骤5;若接收的策略为紧急减速,则执行步骤6;
19.步骤4:加速缩小跟车距离,然后执行步骤7;
20.步骤5:局部绕行跟车,然后执行步骤7;
21.步骤6:紧急减速,然后执行步骤7;
22.步骤7:跟车行驶。
23.进一步的,步骤2选择策略的具体方法为:
24.步骤2-1:利用数据采集系统采集汽车正常行驶中的汽车状态信息和环境信息,包括:自车纵向车速v1、纵向加速度a1;夹塞车与自车的纵向为距离l2;夹塞车的航向角为θ、夹塞车前进速度为v2、夹塞车前进加速度为a2,与一侧车道线的距离l1为两车纵向起始距离为b;
25.步骤2-2:整车控制系统利用数据采集系统中的信号,计算出夹塞车变道所需的时间,t1为过车道线的时间,t2为进入自车前进条形框的时间:
[0026][0027][0028]
w和车宽度;
[0029]
步骤2-3:整车控制系统判断汽车目前行驶状态防夹塞方式的判别:
[0030][0031][0032]
c为t1后,车头过线部分到了p点,d为t2时间后,车头到了q点;a1为自车的纵向加速度,最大取0.6g,g为9.8m/s2;
[0033]
若满足式(3)则表明在夹塞车越过车道线的给定时间内,自车可以通过加速跟车,
来防止被夹塞,执行步骤4;
[0034]
若不满足式(3),满足式(4),则表明在夹塞车进入自车车道的给定时间内,自车可以通过局部绕行加速跟车,来防止被夹塞;其局部绕行控制可以用内置的绕行路径来实现,执行步骤5;
[0035]
若式(3)和式(4)均不满足,则表明夹塞车加入的速度快且角度大,自车只能紧急停车,执行步骤6。
[0036]
进一步的,步骤4加速缩小车距的具体方法为,设定防夹塞巡航距离,自车以最大加速度跟上前车,直到夹塞车放弃夹塞回到自己车道中心线后,再执行步骤7;
[0037][0038]
t
v1
为系统作用延迟时间取0.5秒,s1防夹塞巡航距离,
△
v为自车和前车相对速度,μ为路面附着系数取0.85,d0为两车的停车间距,取1米。
[0039]
进一步的,步骤5所述局部绕行跟车的实时路径,包含但不限于:
[0040][0041]
式中,x1为自车当前纵向坐标,d
lat
为局部绕行的侧向位移量,ld为整个局部绕行路径;在规划好的路径下,通过但不限于反馈控制进行路径的跟随,自车的纵向速度v1不变,直到局部绕开夹塞车,自车重新回到车道中心线,然后执行步骤7。
[0042]
进一步的,步骤6所述紧急减速的具体方法为:以0.4g的减速度进行减速,等待夹塞车进入自车前方,然后执行步骤7。
[0043]
进一步的,步骤7所述跟车具体方法为:基于安全跟车距离,时刻调整自车的车速,实现恒定距离跟车;
[0044]
s0=v1*t
v2-∫
△
v(t)dt+d0ꢀꢀ
(7)
[0045]
t
v2
车头时距,取2秒,s0为安全跟车距离,
△
v为自车和前车相对速度,d0为两车的停车间距,取1米。
[0046]
本发明采取缩小跟车距离或者加速局部绕道超车逼回夹塞车辆的控制策略来防止自车被夹塞,或采取紧急减速的策略避免碰撞,有效地防止了拥堵车流中的夹塞变道,避免了由夹塞变道造成的危险,维持了正常的车流,提高了车流的前进速度,避免了频繁的加减速,提高了驾驶舒适性和经济型。
附图说明
[0047]
图1是本案中控制策略系统的结构示意图;
[0048]
图2是混合交通流模型图;
[0049]
图3是执行局部绕行跟车策略的示意图。
具体实施方式
[0050]
为能清楚说明本专利的技术特点,下面通过具体实施方式,并结合其附图,对本专利进行详细阐述。
[0051]
本发明如图1-3所示,公开了一种用于混合交通流拥堵工况的智能车辆控制方法,
用于实现该方法的控制策略系统包括数据采集系统、整车控制系统、执行机构系统。其控制方法为通过数据采集系统采集汽车在行驶过程中的环境信息和汽车状态信息,将采集到的环境信息和汽车状态信息输入到整车控制系统中并根据夹塞模型判断是否存在夹塞车辆,采取缩小跟车距离或者加速局部绕道超车逼回夹塞车辆的控制策略。本发明有效地防止了拥堵车流中的夹塞变道,避免了由夹塞变道造成的危险,维持了正常的车流,提高了车流的前进速度,避免了频繁的加减速,提高了驾驶舒适性和经济型。
[0052]
所述数据采集系统包括环境感知系统以及车辆状态感知系统;
[0053]
所述环境感知系统,雷达传感器置于汽车的两侧用于采集相邻车道行驶车辆的速度信息、加速度信息和位置信息。
[0054]
所述车辆状态感知系统,包括方向盘转角传感器、车速传感器、陀螺仪、侧向加速度传感器,用于采集汽车行驶时的汽车状态信息;其中方向盘转角传感器置于方向盘下方,用于采集方向盘转角信息;四个车速传感器置于车轮的输出端,用于采集车速信息;用陀螺仪测量车辆航向角信息;其余传感器置于车内用于采集包括侧向加速度等。
[0055]
所述整车控制系统包含:跟车安全距离模型和防夹塞安全距离模型,通过自车速度、相对速度以及停车间距来体现;横向夹塞模型,通过汽车的行驶状态和环境信息判断夹塞汽车行驶所需的时间和距离。将数据采集系统中数据分别输入到两个距离模型中,得到相应的控制策略。接收和处理数据采集系统的数据,并将处理结果输出到执行机构系统。
[0056]
所述的执行系统由纵向控制器和横向控制器组成,其中,纵向控制器由制动执行器、速度执行器组成,横向控制器由转向执行器组成。
[0057]
本发明的一种用于混合交通流拥堵工况的智能车辆控制方法,包括以下步骤;
[0058]
步骤1:利用数据采集系统采集汽车正常行驶中的汽车状态信息和环境信息。
[0059]
步骤2:整车控制系统通过夹塞模型判断是否有夹塞车辆,判断逻辑为:
[0060]ay2
》0.7m/s2或y2》l1/2
[0061]
其中,a
y2
为夹塞车向自车靠近的加速度,y2为夹塞车偏离原始车道中心线的量,l1为车辆边缘与车道线的距离,两者通过毫米波雷达测得;若没有夹塞车辆,则执行步骤7;若存在夹塞车辆,则在选择策略之后,执行步骤3。
[0062]
图2为混合交通流模型图,优选地,夹塞模型的具体判断方法为:
[0063]
步骤2-1:利用数据采集系统采集汽车正常行驶中的汽车状态信息和环境信息,包括:自车纵向车速v1、纵向加速度a1;夹塞车与自车的纵向为距离l2(由毫米波雷达测得);夹塞车的航向角为θ(即与自车前进方向的夹角)、夹塞车前进速度为v2、夹塞车前进加速度为a2,与一侧车道线的距离l1为两车纵向起始距离为b(由毫米波雷达测得);
[0064]
步骤2-2:整车控制系统利用数据采集系统中的信号,计算出夹塞车变道所需的时间,t1为过车道线的时间,t2为进入自车前进条形框的时间:
[0065][0066][0067]
w和车宽度;
[0068]
步骤2-3:整车控制系统判断汽车目前行驶状态防夹塞方式的判别:
[0069][0070][0071]
c为t1后,车头过线部分到了p点,d为t2时间后,车头到了q点;a1为自车的纵向加速度,最大取0.6g,g为9.8m/s2;
[0072]
若满足式(3)则表明在夹塞车越过车道线的给定时间内,自车可以通过加速跟车,来防止被夹塞,执行步骤4;
[0073]
若不满足式(3),满足式(4),则表明在夹塞车进入自车车道的给定时间内,自车可以通过局部绕行加速跟车,来防止被夹塞;其局部绕行控制可以用内置的绕行路径来实现,执行步骤5;
[0074]
若式(3)和式(4)均不满足,则表明夹塞车加入的速度快且角度大,自车只能紧急停车,执行步骤6。
[0075]
步骤3:执行系统接收到整车控制系统的信号,若接收的策略为加速缩小车距,则执行步骤4;若接收的策略为局部绕行,则执行步骤5;若接收的策略为紧急减速,则执行步骤6;
[0076]
步骤4:加速缩小跟车距离,然后执行步骤7;
[0077]
步骤4加速缩小车距的具体方法为,设定防夹塞巡航距离,自车以最大加速度跟上前车,直到夹塞车放弃夹塞回到自己车道中心线后,再执行步骤7;
[0078][0079]
t
v1
为系统作用延迟时间取0.5秒,s1防夹塞巡航距离,
△
v为自车和前车相对速度,μ为路面附着系数取0.85,d0为两车的停车间距,取1米。
[0080]
步骤5:局部绕行跟车,然后执行步骤7;
[0081]
步骤5所述局部绕行跟车的实时路径,包含但不限于:
[0082][0083]
式中,x1为自车当前纵向坐标,d
lat
为局部绕行的侧向位移量,ld为整个局部绕行路径;在规划好的路径下,通过但不限于反馈控制进行路径的跟随,自车的纵向速度v1不变,直到局部绕开夹塞车,自车重新回到车道中心线,然后执行步骤7。
[0084]
步骤6:紧急减速,然后执行步骤7;
[0085]
步骤6所述紧急减速的具体方法为:以0.4g的减速度进行减速,等待夹塞车进入自车前方,然后执行步骤7。
[0086]
步骤7:跟车行驶。
[0087]
步骤7所述跟车具体方法为:基于安全跟车距离,时刻调整自车的车速,实现恒定距离跟车;
[0088]
s0=v1*t
v2-∫
△
v(t)dt+d0ꢀꢀ
(7)
[0089]
t
v2
车头时距,取2秒,s0为安全跟车距离,
△
v为自车和前车相对速度,d0为两车的停车间距,取1米。
[0090]
本发明具体实施途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1